基于STM32單片機和GNSS平臺的壓力管道測量系統
2022-10-18 03:54:04陳鴻鵬威海市特種設備檢驗研究院山東威海264200
化工管理 2022年28期
陳鴻鵬(威海市特種設備檢驗研究院,山東 威海 264200)
0 引言
隨著工業規模化和精細化的不斷發展,壓力管道的數量也在不斷增加,作為一類重要的特種設備,壓力管道需要定期進行檢驗。根據TSG D0001—2009《壓力管道安全技術監察規程—工業管道》規定[1],一般情況下,壓力管道的檢驗人員在檢驗過程中需要審查壓力管道設計、安裝、使用的相關資料。實際檢驗過程中,部分壓力管道使用單位的安裝竣工資料由于保存不當圖紙丟失以及檢驗人員對壓力管道的相關資料存在懷疑時,需要對壓力管道進行現場測量,重新繪制壓力管道單線圖。對于戶外較為復雜或者長度較長的壓力管道,激光測距儀、卷尺、羅盤等傳統測量方法工作效率不高,檢驗人員的大量精力用在測量和繪制單線圖的工作中來,由于傳統測量操作不便、需要人工記錄和分析數據等原因,已經不能完全滿足檢驗工作高效、精確的要求。本文通過利用STM32單片機、GNSS差分定位和氣壓定高等,對戶外壓力管道的重要坐標點進行三維坐標的測量,自動記錄和繪制壓力管道單線圖,可以實現管道關鍵測量點數據的準確、高速記錄,提高壓力管道檢驗的速度和效率。后期也可以利用地圖軟件SDK等二次開發,以直觀形式復原壓力管道的實際位置和分布。
1 系統整體結構
壓力管道測量系統的硬件組成如圖1所示。本系統主要由STM32F103單片機控制模塊和GNSS雙模接收模塊、BMP280高度氣壓傳感模塊、TFT顯示屏模塊、SD卡記錄模塊及控制按鈕6個部分組成,另外有1組RS232通訊接口方便接入PC機或其他終端。其中STM32F103控制模塊作為程序控制單元,通過接收來自GNSS北斗接收機、BMP280高度氣壓計等傳感器的數據,計算出被測測量點的坐標數據和相對高度數據,通過SD卡模塊記錄各測量點的數據,并通過TFT顯示屏模塊實時繪制管道走向的基本圖像縮略圖,便于檢驗人員現場參考。后期通過PC軟件讀取SD卡記錄的坐標和標記信息,可以生成和導出壓力管道的矢量圖。

圖1 系統硬件構成
2 系統硬件設計
2.1 STM32單片機
系統使用意法半導體STM32F103ZET6芯片,該芯片集成72MHz高性能ARM RISC內核,擁有兩個I2C、三個 SPI、一個 SDIO、五個 USART、一個 USB和一個CAN,可在-40至+105 ℃的溫度范圍內工作,電源電壓為2.0至3.6 V。利用該芯片的各種端口實現通訊、顯示、輸入輸出和存儲功能。
2.2 GNSS北斗接收機
由于普通民用級單點定位精度普遍在1~2 m之內,為進一步提高定位精度,采取使用RTK差分定位技術的定位模塊。系統使用1顆國產BDP2620北斗、GPS雙模定位模組作為定位接收機,芯片內置螺旋天線,串口波特率4 800~230 400 bps,通訊協議NMEA-0183,捕獲追蹤靈敏度不低于-165 dBm,數據刷新率1 Hz或5 Hz。RTK模式下單點定位精度0.1~0.15 m,采取串口通訊,可以滿足管道單線圖記錄精度要求。
2.3 高度氣壓計
系統使用BMP280大氣壓強傳感器模塊作為高度數據來源,該模塊采用I2C接口,相對絕對精度0.02 hPa(典型值),數據刷新率不低于20 Hz。
2.4 TFT顯示屏
系統選取國產5英寸320×240分辨率TFT顯示屏,顯示屏采用8線SPI接口,由STM32單片機直接驅動,最高亮度不低于400 nit,基本滿足戶外顯示亮度要求。
2.5 SD卡記錄模塊
SD卡記錄模塊型號CH376S,兼容5 V和3.3 V電平,采用8線SPI接口,SD卡文件采用FAT32格式。
2.6 數據通訊模塊
系統采用串口接口實現RS232協議,采用DB25型連接接頭,可以方便接入PC或者其他終端,通訊使用接收、發送、接地三條線,實現全雙工通信,默認傳送速率9 600 bps。另外有一條USB通訊接口,主要用于上機位,實現程序上傳、調試等功能。
2.7 供電
電源采取4.2 V的鋰電池模塊供電,鋰電池自帶保護電路,外置AC/DC USB Tpye-C充電接口。內部使用DC/DC升降壓電路實現3.3 V和5 V電壓的輸出。
將GNSS北斗接收機接入串口通訊接口,高度計接入I2C接口,SD卡模塊和顯示屏模塊分別接入SPI接口,接好控制按鈕等其他輔助電路。
3 數據的處理
系統的數據處理流程如圖2所示,主要分為數據輸入、處理和輸出三個部分。
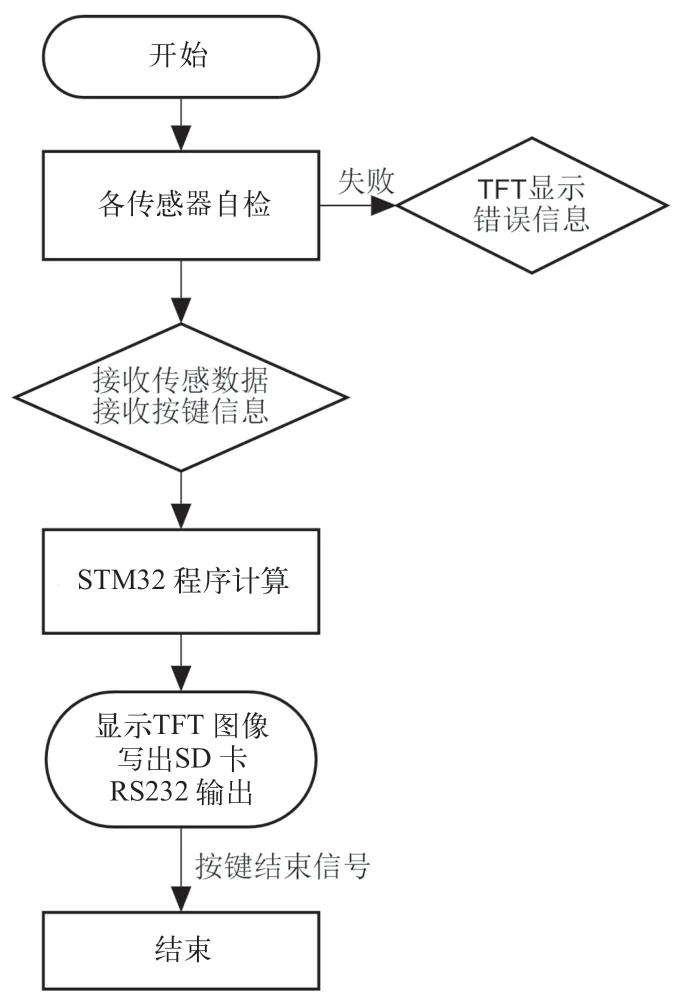
圖2 數據處理流程
3.1 GNSS定位數據的處理
GNSS定位芯片首次通電后進行冷啟動,開始搜索衛星信號,同時利用協議輸出未定位的信號。衛星鎖定一定數量衛星信號后將開始輸出定位信息,通過協議傳送至單片機,單片機將數據轉換為經度和維度的二維坐標數值,生成坐標數組。根據兩點坐標數值的不同,通過以下公式計算出兩點間的距離:
根據地球直徑,計算出兩測量點的距離,使用以下公式計算:

其中R1為1經度的實際距離,取111 712.691 506 410 557 299 843 014 128 73 m;R2為1維度的實際距離,取R2為102 834.742 580 260 897 860 136 774 762 85 m。
然后使用勾股定理計算出兩點間的實際距離Ds。
因GNSS定位模塊在RTK高精度模式下的刷新率為1 Hz,考慮到實際現場測定效率,不采取其他濾波算法,采取取樣3次取平均值的方式縮小系統誤差。
3.2 高度數據的處理
衛星定位也能提供高度數據,但數據大多為橢球高度,與實際海拔高度存在一定誤差。故采用氣壓高度計的方法獲取各測量點的高度。以首次測量點的高度值作為基準高度,所有測量點的海拔高度利用以下海拔-大氣壓高度公式[2]計算:

式中:P0取標準大氣壓101.325 kPa。
對氣壓傳感數據,在20 Hz采樣過程中,發現仍有部分數值偏離較大,出現數據抖動情況,故采取卡爾曼濾波算法以提高數據穩定性。在不考慮其他因素影響下,可以建立單模型的一階卡爾曼濾波,主要算法如下:
上一個最優值對應的協方差:

式中:P(k|k-1)為根據上一測量值預測的協方差;P(k-1|k-1)為上一次計算的最優值;Q為過程誤差。
卡爾曼增益:

式中:R為測量誤差。
計算出本次結果對應的協方差:

計算出本次數值的最優解:

式中:X(k|k-1)為根據上一測量值預測的結果;X(k-1|k-1)為上一次計算的最優解;Z(k)為實際測量值。
根據以上濾波算法進行編程上機測試,在封閉容器內通入壓縮空氣逐步加壓,模擬不同氣壓值下的狀態并讀取傳感器的數值,如圖3所示。測試發現傳感器讀數在實際值附近呈現隨機抖動分布。經過卡爾曼算法濾波后,計算數據有很好的跟隨性和平滑性,能夠有效過濾掉數據中偏離較大的值,提高了數據的穩定性和有效性。在實際操作中需要根據數據的特性確定起始的Q值和R值,其中Q值過大,動態響應較快,但收斂速度變慢,R值過大,收斂速度變快,但動態響應變慢。所以要針對數據采樣頻率和數據離散特性,通過實驗獲取最為符合的設定值,以獲得最符合的動態響應和數據收斂。一階卡爾曼濾波是對離散型數據的實際值進行收斂式的計算預測,收斂速度和數據量及離散特性緊密相關,計算時要盡可能使用原始采集數據,以避免數據在經過處理后增大系統誤差從而偏離實際數值。
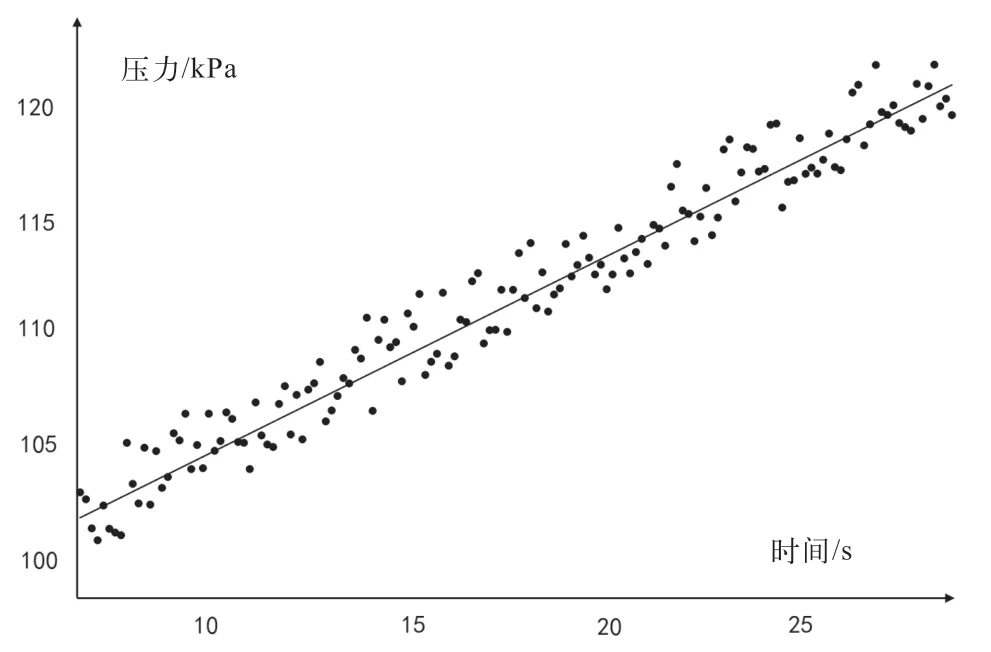
圖3 氣壓傳感器的卡爾曼濾波
3.3 數據記錄
系統使用串口命令對SD卡記錄模塊進行操作,SD卡使用FAT32文件格式,在目錄下利用命令建立pipeline+建立時間.txt文件,將坐標點的相關信息以數組的形式寫入文件,數據格式為編號+坐標+大氣壓強+時間+測量點類型,具體如下:

記錄完成后,可以方便拷貝留存。
4 程序的設計
4.1 現場測量的流程
壓力管道現場測定坐標流程如圖4所示,主要包含了資料確認、現場關鍵點測量和數據記錄等步驟。

圖4 管道單線圖繪制流程
4.2 測量點類型的確認
如圖5所示,如果不對關鍵點進行類型的標記,相鄰測量點的連線繪制將有多種不同結果,無法根據測量點準確繪制管道走向。為避免此類問題,在經過點進行標記時,設定測量點類型為單點、連接點、三通、焊口。實際檢驗過程中由檢驗人員確定測量點的類型,此時管道的走向具有唯一性。為減少輸入復雜性,該數據的編號由系統自動賦值。
4.3 坐標系的變換及繪制
壓力管道單線圖能夠一目了然地了解整個管線系統的空間走向和位置,繪制時可以采用傾斜投影的方法,以X軸表示南北方向,Y軸表示東西方向,Z軸表示高度方向。單線圖上標記管道走向、焊口編號和管道材質代號等基本信息。
Z軸方向采用以首個測定點高度作為Z=0的基準高度,其他測定點根據動態縮放比例線性縮放。
X軸方向,程序使用冒泡法遍歷測定點的經度坐標,選取經度最小值的測定點作為X=0基準,其他測定點的X、Y軸坐標參照下列公式計算:

式中:Y(k-1)為上一個測量點的坐標;Y(k)為目前測量點的坐標。
以第一個測定點向經度增大方向(東)尋找最近的相連測定點,重復上面計算,直到計算結束,所有管道的坐標完成轉換。
PC端軟件采用C++語言開發,相關算法與顯示屏顯示算法基本一致,增加BMP格式的圖像導出功能。
4.4 確定縮放比例
程序設置Xs[xmin,xmax]和Ys[ymin,ymax]共2個數組,記錄所測數據的極值,利用以下公式計算出各方向上顯示屏合理的縮放比例:

式中:Xp為顯示屏在X方向上的分辨率;Xk為預留空白邊界大小。
同樣計算出Sy,兩者以最大者作為最終縮放比例,保證在管道測定中,管道單線圖能夠隨著測量的進行合理縮放。
5 系統測試及分析
將各硬件設備按照設計進行連接,程序寫入單片機,開機測試正常通電后,到某管道使用地點進行實地測量。經過測試,該系統自通電至GNSS定位精度達到要求,共計使用28 s。現場測量計算數據如圖所示,包含常見管道的上下以及水平方向的常見走向,測試中共定位壓力管道管段6段,管道測定長度與實際測定長度統計如表1所示。
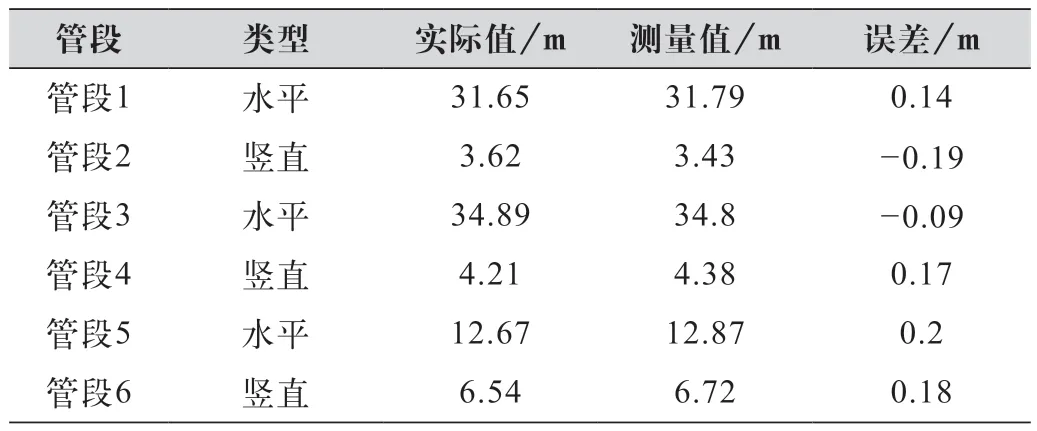
表1 系統實際測試數據
由此可以看出,相關測定點的標記在水平方向上精度較高,誤差均不高于0.2 m;垂直方向精度誤差均小于0.2 m,符合壓力管道檢驗單線圖繪制的要求,各個測量點標記基本準確,圖像繪制符合實際走向。
導出pipeline20220204081215.txt文件至PC端,導入到單線圖生成軟件,實際繪制圖像如圖5所示。

圖5 電腦端繪制管道單線圖
生成的管道單線圖草圖可以導出為圖像文件,方便用于檢驗報告中。
6 結語
本文設計的壓力管道單線圖輔助測量繪制系統,通過使用較為常見的STM32單片機和北斗定位模塊、高度計等模塊,實現了對壓力管道各測量點坐標較為精確的記錄,通過坐標變換,可以實時顯示壓力管道的縮略圖。經過實際測試,各傳感器工作正常,測量點獲取快速準確,圖形繪制符合管道的基本走向,數據記錄完整有效,是提高壓力管道檢驗工作效率的有效方式。后期可以采取更高分辨率和尺寸的顯示屏提高顯示觀感,增加手動縮放功能以滿足對細節查看的需求,也可以利用加速度計、GNSS數據和高度計的融合計算,進一步提高坐標數據的精確度。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年12期)2018-08-01 00:48:04
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電子制作(2017年19期)2017-02-02 07:08:27
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21