捷聯(lián)慣組空間八點減振IMU組合設(shè)計
2022-10-09 01:27:16楊研蒙閆紅松
導(dǎo)航定位與授時 2022年5期
李 茜,呂 琛,李 欣,楊研蒙,閆紅松
(1.北京自動化控制設(shè)備研究所,北京 100074;2.中國人民解放軍96963部隊, 北京 100000)
0 引言
捷聯(lián)慣組作為慣性坐標(biāo)基準(zhǔn)和慣性測量裝置,其工作精度與可靠性直接影響飛行器的飛行精度。在一般情況下,捷聯(lián)慣組減振系統(tǒng)可以沿著3個坐標(biāo)軸的方向平移振動,也可以繞3個坐標(biāo)軸作旋轉(zhuǎn)振動,系統(tǒng)的每一種平動或者轉(zhuǎn)動都有它的固有頻率,因此一共有6個自由度。從導(dǎo)航性能分析,力學(xué)環(huán)境特別是振動會使慣組輸出含有高頻成分,而相對于載體的剛體運動,高頻成分是虛假的運動,有可能引起圓錐運動等效應(yīng),致使慣導(dǎo)及其相關(guān)應(yīng)用系統(tǒng)性能下降。因此,需要抑制振動(包括線振動和角振動)、沖擊等各種因素引起的誤差。
陀螺儀和加速度計安裝于臺體上構(gòu)成的慣性測量單元(Inertial Measurement Unit,IMU)組合,是捷聯(lián)慣組中最為重要的核心部件。利用減振器將IMU組合彈性連接到系統(tǒng)結(jié)構(gòu)上,可以減小劇烈的隨機振動對陀螺儀和加速度計的不良影響,有效提升捷聯(lián)慣組的環(huán)境適應(yīng)性。但當(dāng)減振組件的彈性中心與質(zhì)心不重合時,其在作線振動的同時還會伴隨有角振動,作角振動的同時也夾雜著線振動,即減振組件不同自由度上的振動之間會發(fā)生耦合,而線角振動頻率差距大,質(zhì)量分布盡量集中于中心可在一定程度上抑制線角耦合。線角耦合給減振組件引入偽角運動信號,不僅由于尺寸效應(yīng)影響線加速度的測量精度,而且還影響角速度測量的傳遞特性,從而影響減振組件的測量精度和動態(tài)性能。采用內(nèi)減振的IMU組合體積小、質(zhì)量小,相對于外部減振的捷聯(lián)慣組而言更易引發(fā)線角耦合問題,這成為制約工程應(yīng)用的重要因素。
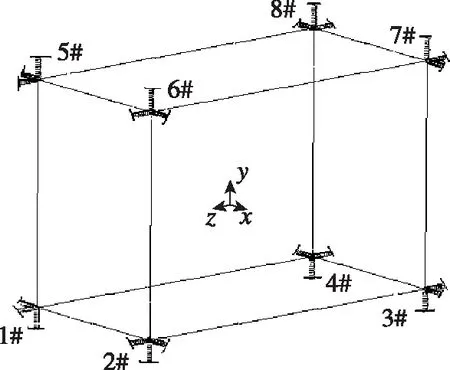
(a) 空間八點減振
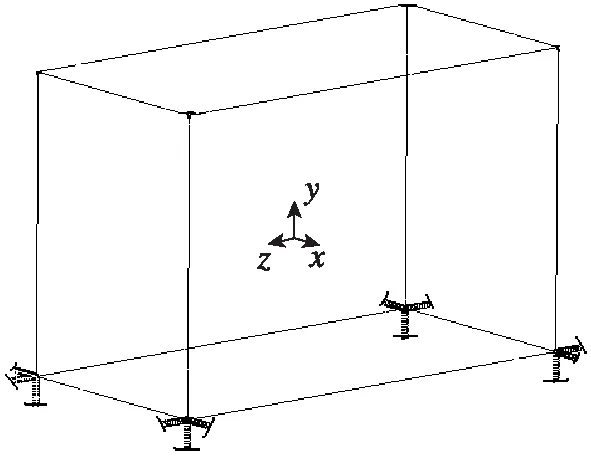
(b) 底部四點減振
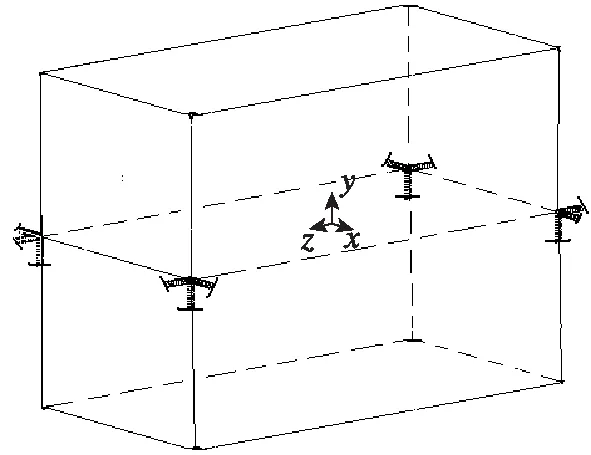
(c) 平面四點減振
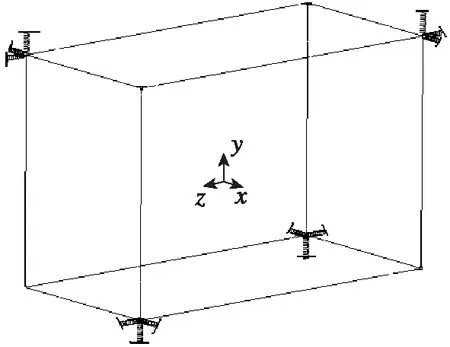
(d) 吊腳四點減振圖1 常見的減振布局形式Fig.1 Common vibration reduction layouts
常見的減振布局形式有四種,分別為底部四點減振、平面四點減振、吊腳四點減振及空間八點減振等,如圖1所示。工程上為了滿足線振動頻率盡可能小、角振動頻率盡可能大的要求,除直接調(diào)整減振器外,通常采用改變減振器布局實現(xiàn),使得支承所得的回轉(zhuǎn)半徑增大,例如用空間四點或八點支撐取代平面四點支撐。空間八點減振由于增大了2個旋轉(zhuǎn)自由度上的減振器跨距,并同時增大了這2個旋轉(zhuǎn)自由度上的角共振頻率,所以理論上線角耦合能夠得到一定程度的抑制。
本文將結(jié)合IMU組合研制過程的相關(guān)經(jīng)驗,從空間八點減振IMU設(shè)計過程、力學(xué)性能仿真及線角耦合抑制等多角度進(jìn)行詳細(xì)的闡述,對今后空間八點減振的IMU組合設(shè)計提供支撐。
1 IMU組合的設(shè)計與分析
1.1 IMU組合的臺體設(shè)計
IMU組合由3個光纖陀螺表頭、1個光線陀螺電路盒、3個撓性加速度計、連接器及結(jié)構(gòu)件組成。臺體需保證具備足夠的力學(xué)環(huán)境適應(yīng)性、溫度環(huán)境適應(yīng)性及安裝精度,具體來說分別是:
1)零部件安裝工藝性,各零部件安裝完成后,方便拆裝返修維護(hù),相互之間不得遮擋;
2)三軸光纖陀螺表頭相互正交、三軸撓性加速度計相互正交,控制安裝面垂直度;
3)臺體具備較高的剛強度,一階模態(tài)高于或接近一般飛行器隨機振動頻譜最高頻率;
4)臺體應(yīng)有合理的熱傳導(dǎo)路徑,盡可能減少電路板以控制熱源數(shù)量,并將熱源盡可能遠(yuǎn)離光纖陀螺表頭與撓性加速度計;
5)IMU組合應(yīng)將質(zhì)心布置于彈性中心;
6)臺體應(yīng)盡量滿足輕質(zhì)化設(shè)計需求;
7)保障臺體具有良好的機加、鑄造工藝性,具備大批量生產(chǎn)的條件。
經(jīng)過多輪修正后,IMU組合及臺體結(jié)構(gòu)如圖2所示。模型上IMU組合的質(zhì)心與彈性中心的偏差低于1mm。

(a) IMU組合示意圖
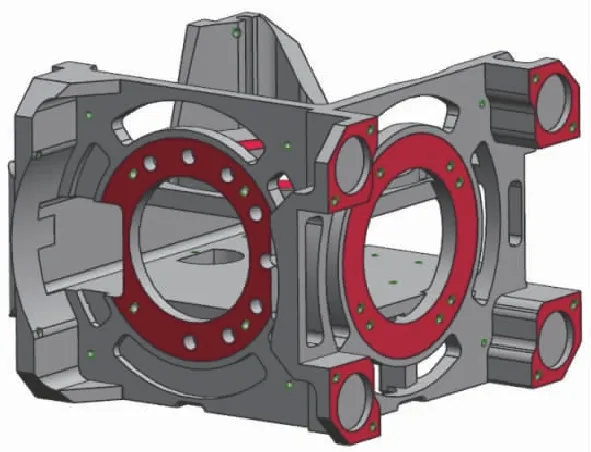
(b) 臺體模型圖2 IMU組合及臺體Fig.2 IMU and platform
1.2 減振設(shè)計
IMU組合減振器的主要功能是提升其抗過載、抗振動能力,避免達(dá)到破壞應(yīng)力的狀態(tài)。一般來說, 除了要求減振器具有必要的物理機械性能外, 還需對減振器的諧振頻率、靜態(tài)剛度、動態(tài)剛度、阻尼系數(shù)等提出要求。
減振器傳遞率公式為
(1)

圖3所示為IMU組合隨機振動輸入條件,如減振器諧振頻率過低則帶寬過低,諧振頻率過高則無法對高頻充分衰減,一般處于40~100Hz之間,本文選擇中值70Hz。減振器的阻尼比越大則動態(tài)放大倍數(shù)越小,目前一般將共振放大倍數(shù)控制在2~5倍,本文選擇阻尼比0.125即放大4倍。此外,振動條件要求減振器在3個方向等剛度、等阻尼,故后續(xù)分析三向的參數(shù)均一致。
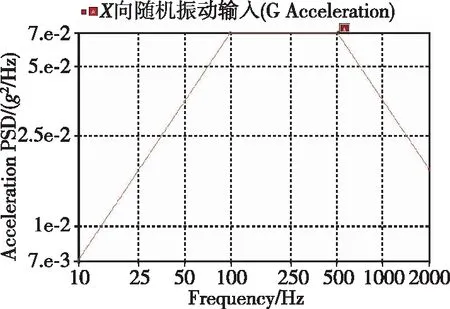
圖3 隨機振動輸入條件Fig.3 Random vibration input condition
1.3 IMU組合模態(tài)計算
模態(tài)是對結(jié)構(gòu)固有特性的一種表述,通過模態(tài)分析可以客觀地描述結(jié)構(gòu)可靠性與力學(xué)環(huán)境適應(yīng)性。本次研制的IMU組合將在船載、車載、機載等諸多負(fù)載環(huán)境下工作,其整體模態(tài)應(yīng)盡可能高。對臺體結(jié)構(gòu)進(jìn)行合理簡化處理后,建立IMU組合的有限元模型如圖4所示,模型共包含176433個高階單元和310032個節(jié)點。文中描述坐標(biāo)系與圖4坐標(biāo)系一致。文中涉及的所有計算均在有限元軟件ANSYS Workbench環(huán)境下完成。
臺體結(jié)構(gòu)采用材料為硬鋁2A12, 其密度約為2800kg/m, 彈性模量為72Gpa, 泊松比為0.3。通過模態(tài)分析得到IMU組合的前7階模態(tài)如表1所示。

表1 IMU組合前7階模態(tài)
表1中,第1階固有模態(tài)為沿方向線運動頻率、第2階固有模態(tài)為沿方向線運動頻率、第3階固有模態(tài)為沿方向線運動頻率、第4階固有模態(tài)為沿軸角運動頻率、第5階固有模態(tài)為沿軸角運動頻率、第6階固有模態(tài)為沿軸角運動頻率。可見,IMU組合滿足工程應(yīng)用上線運動頻率盡可能小、角運動頻率盡可能大的要求,線角耦合的現(xiàn)象在一定程度上可以被結(jié)構(gòu)布局形式抑制。第7階模態(tài)為875.7Hz,IMU組合具備足夠的剛度。
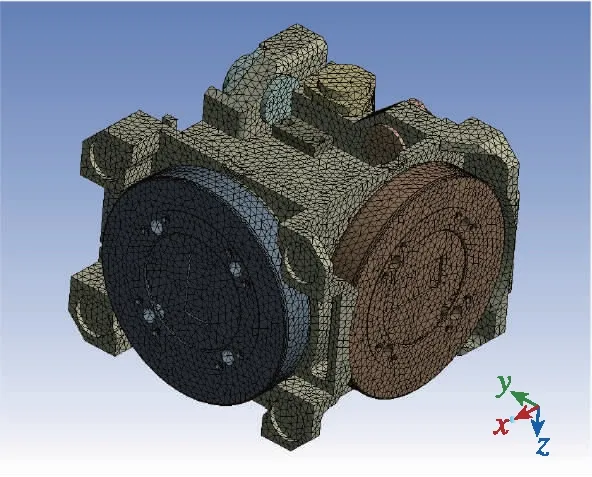
圖4 IMU組合的有限元模型Fig.4 Finite element model of the IMU
1.4 IMU組合隨機振動仿真
按圖3隨機振動輸入條件仿真,可以得到光纖陀螺表頭安裝位置的測點加速度響應(yīng)功率譜密度曲線,如圖5所示。可以看到,陀螺表頭安裝位置除了在減振器的諧振頻率處有明顯放大外,高頻部分都得到了有效衰減,曲線上無線角耦合的二次諧振峰,說明空間八點減振的IMU組合在抑制線角耦合上具有一定作用。
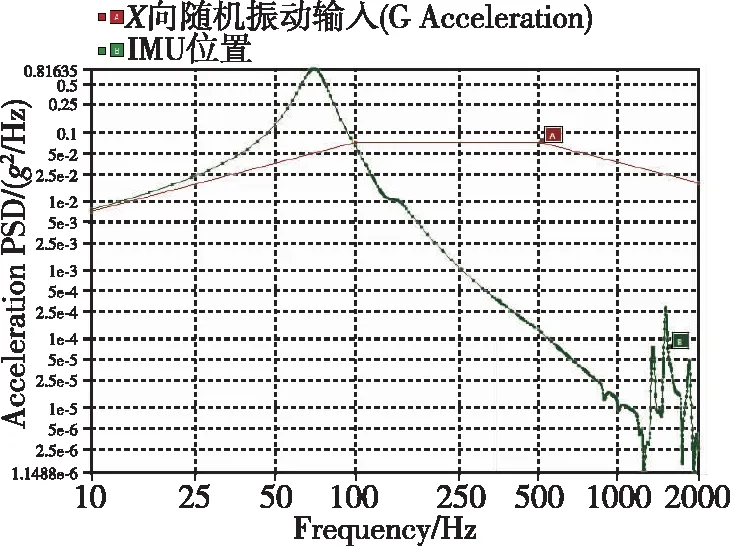
(a) X向隨機振動陀螺表頭安裝位置響應(yīng)曲線

(b) Y向隨機振動陀螺表頭安裝位置響應(yīng)曲線
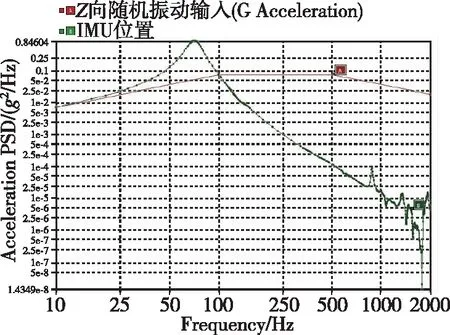
(c) Z向隨機振動陀螺表頭安裝位置響應(yīng)曲線圖5 陀螺表頭安裝位置響應(yīng)曲線圖Fig.5 Gyroscope response curves
2 IMU組合質(zhì)心調(diào)整
減振組件的彈性中心與系統(tǒng)的質(zhì)心不重合,會導(dǎo)致系統(tǒng)在不同自由度上的振動之間發(fā)生耦合。通過精確測量質(zhì)心并予以調(diào)整的方法是降低線角耦合程度常見的解決方案。盡管空間八點減振布局形式在一定程度上可以抑制線角耦合現(xiàn)象,但受限于內(nèi)減振IMU組合相對較小的跨距,彈性中心與質(zhì)心不重合帶來的影響相對于外減振系統(tǒng)更為敏感。工程上一般采用天平式平衡機,通過定點添加配重的方式實現(xiàn)受試系統(tǒng)的靜平衡,再根據(jù)配重的質(zhì)量作用于三維模型上反求系統(tǒng)的質(zhì)心。
2.1 天平式平衡機配平機理
天平式平衡機對不平衡量的放大系數(shù)高、測量精度高,具有成本低、維護(hù)簡單的優(yōu)點。受試IMU組合通過平衡工裝轉(zhuǎn)接到大梁上,工裝與大梁靠面緊貼保證其安裝精度,如圖6所示。
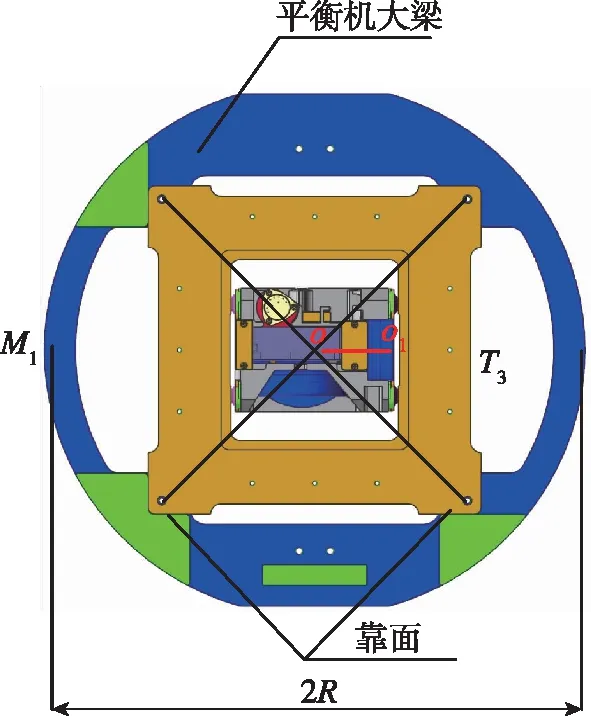
圖6 IMU組合安裝示意圖Fig.6 IMU installation diagram
假設(shè)平衡機的旋轉(zhuǎn)中心為點,慣導(dǎo)系統(tǒng)的質(zhì)心為點,二者距離為;再設(shè)平衡工裝存在恒定的偏心,導(dǎo)致不平衡力矩為,那么大梁、平衡工裝及IMU組合組成的平衡系統(tǒng)會向一側(cè)傾斜,通過在大梁另一側(cè)添加質(zhì)量為的配重,平衡系統(tǒng)會恢復(fù)平衡直至水平儀氣泡歸于零位,如式(2)
=+
(2)
式中,=,為IMU組合的質(zhì)量;=,為配重到旋轉(zhuǎn)中心的距離。
保持配重在大梁的位置不變,將IMU組合翻轉(zhuǎn)180°安裝,此時大梁失衡向一側(cè)傾斜,通過添加質(zhì)量為的配重或移動砝碼,平衡系統(tǒng)會恢復(fù)平衡,如式(3)
++=+
(3)
式中,=,為配重到旋轉(zhuǎn)中心的距離;=,為砝碼質(zhì)量,為砝碼移動的距離。
將式(2)代入式(3),可得

(4)
則可以求解IMU組合的質(zhì)心與平衡機的旋轉(zhuǎn)中心的偏移量。
2.2 IMU組合的調(diào)整過程
制作平衡工裝如圖7所示。經(jīng)測量,系統(tǒng)向在大梁增加配重3.9g,代入式(3)可得向質(zhì)心為-0.1mm;系統(tǒng)向在大梁增加配重58.3g,代入式(3)可得向質(zhì)心為1.49mm;系統(tǒng)向在大梁增加配重26.4g,代入式(3)可得向質(zhì)心為0.67mm。可見,模型與實物間存在一定的偏差。
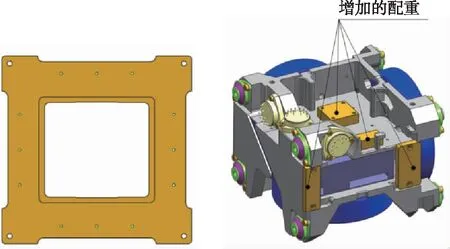
圖7 平衡工裝及調(diào)整后的IMU組合Fig.7 Balance tooling and adjusted IMU
將實測坐標(biāo)輸入模型坐標(biāo)系后進(jìn)行調(diào)整,在、兩個方向增加配重如圖7所示。經(jīng)過平衡機再次測量,IMU組合的質(zhì)心與彈性坐標(biāo)系重合度在0.1mm以上,如表2所示。
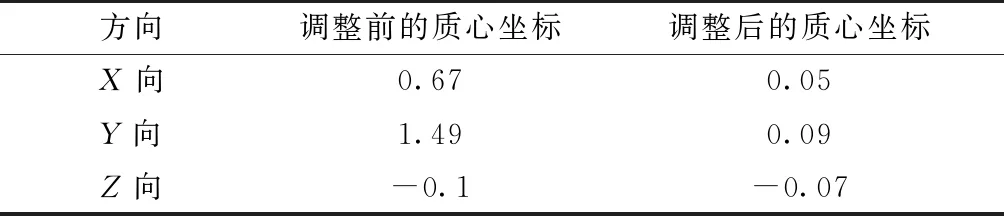
表2 調(diào)整前后的質(zhì)心對比
3 試驗驗證
隨機振動試驗前,將IMU組合安裝到殼體中組成完整的捷聯(lián)慣組,如圖8所示。在安裝過程中,由于減振器擰緊力矩的不同會導(dǎo)致IMU組合角速度輸出幅度的大幅變化,因此必須采用等力矩方式緊固減振器。

圖8 捷聯(lián)慣組系統(tǒng)Fig.8 Strapdown inertial navigation system (SINS)
在垂臺和滑臺按圖3進(jìn)行振動試驗,光纖陀螺1ms采樣、1ms導(dǎo)航、5ms記錄。減振器諧振頻率、放大倍數(shù)、減振效率、角速度輸出最大值等如表3所示。三向振動時三軸陀螺角速度輸出如圖9所示。可以看出,IMU組合在具備良好的力學(xué)環(huán)境適應(yīng)性時,減振效率均不低于42%,角速度不大于11(°)/s,對比工程經(jīng)驗四點減振IMU組合角速度一般為20(°)/s,具備較佳的角速度輸出特性,能夠有效抑制圓錐運動。通過調(diào)平質(zhì)心IMU組合仍有11(°)/s的角速度,除IMU組合自身具有線角耦合的缺點外,與8只減振器未匹配剛度、未調(diào)整壓縮量也存在一定關(guān)系。

表3 隨機振動試驗結(jié)果
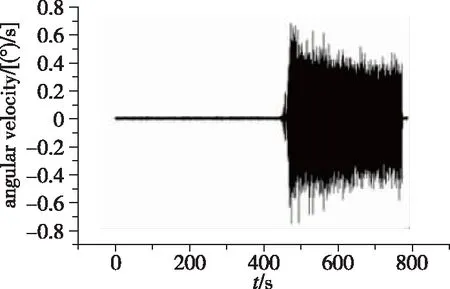
(a) X向振動X陀螺輸出
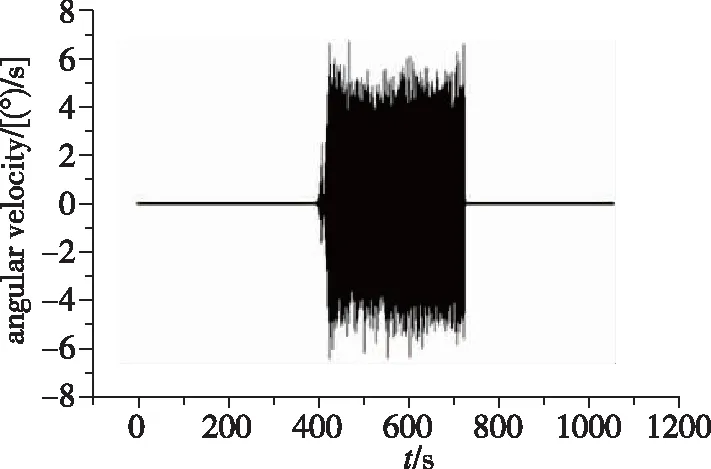
(b) X向振動Y陀螺輸出
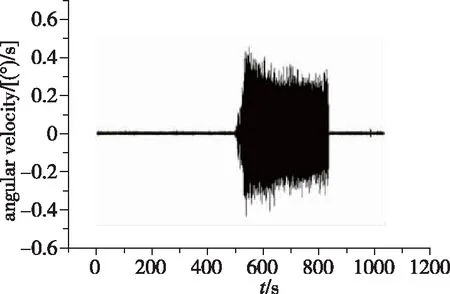
(c) X向振動Z陀螺輸出
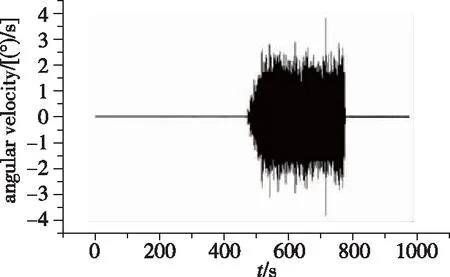
(d) Y向振動X陀螺輸出
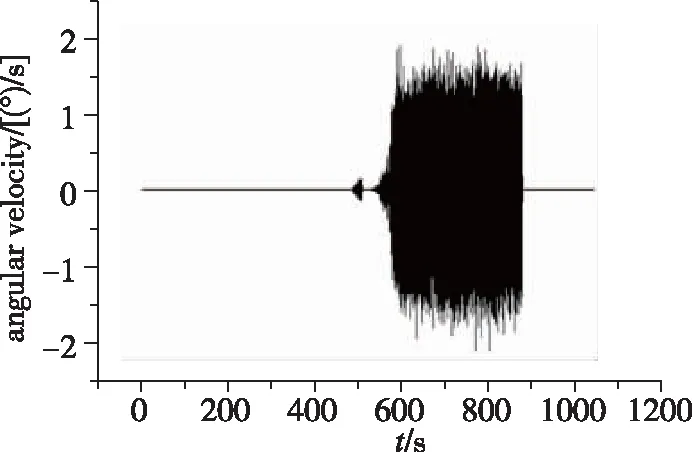
(e) Y向振動Y陀螺輸出
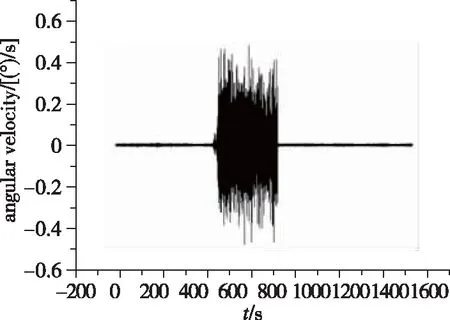
(f) Y向振動Z陀螺輸出
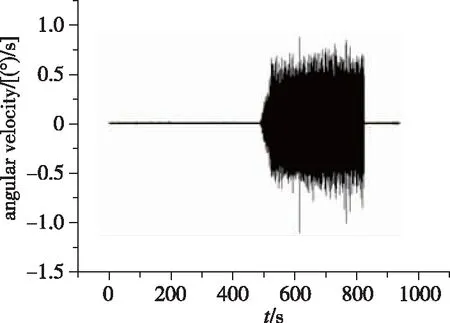
(g) Z向振動X陀螺輸出
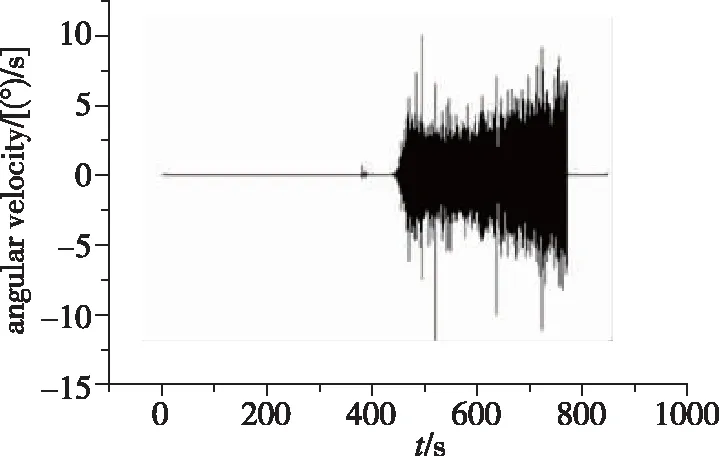
(h) Z向振動Y陀螺輸出

(i) Z向振動Z陀螺輸出圖9 三向振動時三軸陀螺角速度輸出Fig.9 Gyroscope outputs in vibration of three directions
4 結(jié)論
本文闡述了捷聯(lián)慣組IMU結(jié)構(gòu)設(shè)計要點,討論了抑制線角耦合的措施,給出了調(diào)整質(zhì)心的方法,并以實例演示驗證了設(shè)計方法的正確性和有效性,主要結(jié)論如下:
1)增大減振器跨距同時調(diào)整質(zhì)心與減振中心的重合度是提升捷聯(lián)慣組IMU性能的有效措施;
2)在減振組件尺寸受限的情況下,可通過調(diào)整減振器布局的方式來增大減振器的跨距,從而降低隨機振動條件下的耦合角速度;
3)八點減振布局既能夠滿足線振動頻率盡可能小、角振動頻率盡可能大的要求,又可以在空間尺寸不增加的情況下有效增大減振器的跨距,與其他減振布局相比具有明顯的優(yōu)越性;
4)天平式平衡機配平方法不僅簡單經(jīng)濟,而且可以實現(xiàn)較高的配平精度,能夠滿足捷聯(lián)慣組IMU研制的要求。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
廣西科技大學(xué)學(xué)報(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟學(xué)院學(xué)報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學(xué)報(2015年4期)2015-05-07 06:43:35
上海電機學(xué)院學(xué)報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44