基于滑模的多無人機(jī)系統(tǒng)協(xié)同編隊(duì)控制
2022-10-09 01:57:32竇立亞顧維博
導(dǎo)航定位與授時(shí) 2022年5期
關(guān)鍵詞:系統(tǒng)
鞠 爽,王 晶,竇立亞,顧維博
(1.北京化工大學(xué)信息科學(xué)與技術(shù)學(xué)院,北京 100029;2.北方工業(yè)大學(xué)電氣與控制工程學(xué)院,北京 100144)
0 引言
近年來,無人機(jī)(Unmanned Aerial Vehicle,UAV)在救援任務(wù)、監(jiān)視、偵察、航空攝影等領(lǐng)域的應(yīng)用十分廣泛,受到了極大的關(guān)注。值得指出的是,在某些特定的環(huán)境下,單架UAV難以實(shí)現(xiàn)更加復(fù)雜的控制目標(biāo)或者應(yīng)對(duì)更加復(fù)雜的工作環(huán)境,如自然災(zāi)害監(jiān)測(cè)、軍事探測(cè)、追擊目標(biāo)、航空測(cè)繪等。因此,多UAV系統(tǒng)協(xié)同編隊(duì)控制研究作為UAV控制中的一個(gè)重要研究課題,逐漸成為研究的熱點(diǎn)。多UAV系統(tǒng)編隊(duì)控制的目標(biāo)是使一組UAV在運(yùn)動(dòng)的同時(shí)能夠保持一定的期望幾何編隊(duì)。多UAV系統(tǒng)編隊(duì)控制的核心思想是在代數(shù)圖論的基礎(chǔ)上,設(shè)計(jì)一致性控制策略以達(dá)到控制目標(biāo)。
實(shí)際上,領(lǐng)導(dǎo)-跟隨結(jié)構(gòu)方法和虛擬結(jié)構(gòu)方法可以看作是基于一致性的編隊(duì)控制方法的特例。在求解編隊(duì)控制問題時(shí),通常將期望的編隊(duì)軌跡重新表示為一致性狀態(tài),并用虛擬領(lǐng)隊(duì)來表示。領(lǐng)導(dǎo)者獨(dú)立于追隨者,但對(duì)追隨者的行為有影響。然后,可以通過只控制虛擬領(lǐng)導(dǎo)者的行為,進(jìn)而實(shí)現(xiàn)一組跟隨者的控制目標(biāo)。文獻(xiàn)[7]研究了領(lǐng)導(dǎo)者靜止但通信拓?fù)涫乔袚Q拓?fù)鋾r(shí)的一致性問題,當(dāng)領(lǐng)導(dǎo)者動(dòng)態(tài)變化時(shí),該問題更具有挑戰(zhàn)性。文獻(xiàn)[8-10]分別研究了一階、二階和高階多智能體系統(tǒng)的領(lǐng)導(dǎo)-跟隨一致性問題。文獻(xiàn)[11]針對(duì)無人機(jī)動(dòng)力學(xué)模型,提出了基于虛擬結(jié)構(gòu)法的分布式多無人機(jī)魯棒編隊(duì)控制。文獻(xiàn)[12]研究了全向移動(dòng)小車編隊(duì)的軌跡跟蹤問題。對(duì)于移動(dòng)體的運(yùn)動(dòng)規(guī)劃而言,可以分為完整約束和非完整約束兩類,能夠減少位置空間自由度的是完整約束,不能減少位置空間自由度但能減少速度空間自由度的是非完整約束。相較于完整約束,非完整約束對(duì)于系統(tǒng)可能的運(yùn)動(dòng)具有限制條件,盡管這個(gè)問題很有挑戰(zhàn)性,眾多專家也對(duì)非完整約束系統(tǒng)的編隊(duì)控制開展了一系列研究并取得了優(yōu)秀的成果。文獻(xiàn)[14]研究了鏈?zhǔn)椒峭暾s束系統(tǒng)的編隊(duì)控制問題,提出了一種基于觀測(cè)器的一致性算法。文獻(xiàn)[15]研究了有限時(shí)間非完整約束移動(dòng)機(jī)器人的編隊(duì)控制問題。 文獻(xiàn)[16]研究了基于紫外線方位和測(cè)距視覺相對(duì)定位系統(tǒng)的多旋翼UAV領(lǐng)導(dǎo)-跟隨編隊(duì)控制問題。文獻(xiàn)[17]研究了領(lǐng)導(dǎo)者勻速運(yùn)動(dòng)情況下,跟隨者模型具有不確定性的跟隨編隊(duì)控制問題。
滑模控制(Sliding Mode Control,SMC)的主要思想是將被控系統(tǒng)的狀態(tài)量拉到預(yù)先設(shè)計(jì)的滑模面并保持在滑模面上運(yùn)動(dòng),具有魯棒性好、響應(yīng)快速、易于理解和實(shí)現(xiàn)等優(yōu)點(diǎn)。文獻(xiàn)[20]通過SMC實(shí)現(xiàn)了對(duì)單個(gè)UAV的位置控制與姿態(tài)控制。文獻(xiàn)[21]針對(duì)多UAV系統(tǒng),提出了基于滑模干擾觀測(cè)器的動(dòng)態(tài)面控制算法,保證了編隊(duì)控制系統(tǒng)的控制精度和魯棒性。文獻(xiàn)[22]提出了一種基于自適應(yīng)非奇異終端超曲面SMC算法,解決了在有外部擾動(dòng)條件下的UAV和無人地面機(jī)器人的編隊(duì)控制問題。文獻(xiàn)[23]提出了一種分散SMC算法,使無人機(jī)群在高度和航向角上達(dá)到一致。然而,目前對(duì)于非完整約束模型的UAV系統(tǒng)的基于SMC的協(xié)同編隊(duì)控制問題的研究還不充分。
鑒于此,本文針對(duì)一類具有非完整約束的多UAV系統(tǒng),提出了一種基于SMC的協(xié)同編隊(duì)控制算法。主要貢獻(xiàn)總結(jié)如下:
1)在領(lǐng)導(dǎo)-跟隨結(jié)構(gòu)下,采用分布式狀態(tài)觀測(cè)器,在僅部分跟隨者先驗(yàn)已知虛擬領(lǐng)導(dǎo)者信息,并且所有跟隨者之間只需局部交互信息的情況下,所有跟隨者能夠在有限時(shí)間內(nèi)估計(jì)出虛擬領(lǐng)導(dǎo)者的狀態(tài)。 文獻(xiàn)[22]需要所有跟隨者得到領(lǐng)導(dǎo)者信息,文獻(xiàn)[13]研究了無領(lǐng)導(dǎo)者編隊(duì)的有限時(shí)間控制問題,所有無人機(jī)需發(fā)送和接收鄰居信息。從通信和信息交互的角度而言,本文采用的分布式狀態(tài)觀測(cè)器適用于更多的應(yīng)用場(chǎng)景。
2)利用分布式觀測(cè)器的估計(jì)狀態(tài),提出了基于滑模的協(xié)同編隊(duì)控制算法。與文獻(xiàn)[13,22]類似,本文所提控制算法是基于滑模的,能夠使誤差系統(tǒng)狀態(tài)在有限時(shí)間內(nèi)到達(dá)滑模面,使所有無人機(jī)漸近收斂到期望編隊(duì),并且能夠跟蹤上期望的運(yùn)動(dòng)軌跡。由于滑模面的設(shè)計(jì)與被控對(duì)象的參數(shù)及擾動(dòng)無關(guān),也就使得處于滑模運(yùn)動(dòng)的系統(tǒng)具有很好的魯棒性。文獻(xiàn)[15]所提算法可以使無人機(jī)能夠在有限時(shí)間內(nèi)穩(wěn)定,但是未討論算法的魯棒性。另外,與文獻(xiàn)[13]所提出的SMC算法相比,本文所提控制器參數(shù)需滿足的條件簡(jiǎn)單,控制器實(shí)現(xiàn)方便。

1 問題描述與預(yù)備知識(shí)
1.1 圖論

1.2 問題描述
考慮個(gè)跟隨者在平面上運(yùn)動(dòng),它們滿足經(jīng)典的四旋翼UAV非完整約束動(dòng)力學(xué)模型。在全局坐標(biāo)系下,跟隨者的動(dòng)態(tài)表達(dá)式如下

(1)
其中,[;]∈表示UAV的位置;∈表示UAV的線速度;∈表示UAV的角速度;∈[-π,π)表示UAV的偏航角;=1,2,…,。
虛擬領(lǐng)導(dǎo)者的表達(dá)式如下

(2)
其中,[;]∈表示虛擬領(lǐng)導(dǎo)者的位置;∈表示虛擬領(lǐng)導(dǎo)者的線速度;∈表示虛擬領(lǐng)導(dǎo)者的角速度;∈[-π,π)表示虛擬領(lǐng)導(dǎo)者的偏航角。
目標(biāo)1:個(gè)跟隨者能夠收斂至期望編隊(duì)Π,即
(3)
目標(biāo)2:個(gè)跟隨者能夠跟蹤上期望軌跡,即
(4)
其中,,=1,2,…,。
1.3 相關(guān)引理
首先,給出一些關(guān)于齊次性的引理。
文獻(xiàn)[24]考慮連續(xù)向量函數(shù)
()=((),(),…,())

文獻(xiàn)[25]考慮如下系統(tǒng)

(5)
其中,()是連續(xù)函數(shù)。假設(shè)系統(tǒng)(5)的齊次度為。如果初始值是漸近穩(wěn)定的并且<0,那么系統(tǒng)的初始狀態(tài)是有限時(shí)間穩(wěn)定的。
文獻(xiàn)[24]考慮系統(tǒng)(5),假設(shè)存在一個(gè)連續(xù)函數(shù)():→滿足如下條件:
1)()是正定的。
2)存在實(shí)數(shù)c>0,α ∈ (0,1)和原點(diǎn)附近的鄰居集U0 ∈U,V(x)+c(V(x))α ≤0,x ∈U0{0}成立,那么可以得到系統(tǒng)原點(diǎn)是一個(gè)有限時(shí)間穩(wěn)定的,有限時(shí)間為
如果==,那么原點(diǎn)是全局有限時(shí)間穩(wěn)定的。

值得指出的是,僅圖中的部分跟隨者能夠知道虛擬領(lǐng)導(dǎo)者信息。因此,本節(jié)還給出了一個(gè)關(guān)于分布式狀態(tài)觀測(cè)器的引理,用于估計(jì)虛擬領(lǐng)導(dǎo)者的狀態(tài),為控制器的設(shè)計(jì)奠定基礎(chǔ)。
文獻(xiàn)[15]針對(duì)系統(tǒng)(1)和(2),設(shè)計(jì)分布式觀測(cè)器如下

其中
2 主要結(jié)果
本章在引理5中有限時(shí)間觀測(cè)器的基礎(chǔ)上,設(shè)計(jì)了協(xié)同編隊(duì)控制器。


(6)

2.1 誤差系統(tǒng)及問題轉(zhuǎn)化
首先,采用引理5中的狀態(tài)觀測(cè)器,在全局坐標(biāo)系下,定義如下誤差系統(tǒng)
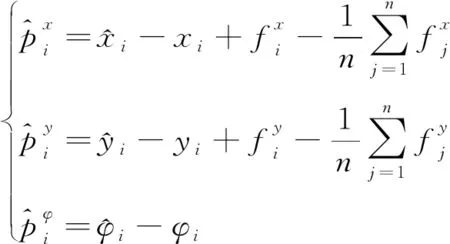
(7)

(8)
為了實(shí)現(xiàn)前文提到的編隊(duì)控制問題,僅需要滿足如下控制目標(biāo)

(9)
理由如下:一方面,當(dāng)式(9)滿足時(shí),存在

,=1,2,…,。根據(jù)式(8)可知,目標(biāo)1(3)滿足。另一方面,當(dāng)式(9)滿足時(shí),有

根據(jù)式(8)可知,目標(biāo)2(4)滿足。
為方便控制器設(shè)計(jì),將全局坐標(biāo)系下的誤差系統(tǒng)(7)轉(zhuǎn)化為笛卡爾坐標(biāo)系下的誤差系統(tǒng),表示為
(10)
當(dāng)≥時(shí),誤差系統(tǒng)(10)表示為
(11)
根據(jù)式(1)、式(2)和式(8),對(duì)式(11)求導(dǎo)可以得出誤差系統(tǒng)的動(dòng)態(tài)表達(dá)式為
(12)
鑒于此,多UAV系統(tǒng)的編隊(duì)控制問題可以轉(zhuǎn)化為誤差系統(tǒng)(12)的穩(wěn)定性問題,即:設(shè)計(jì)合適的控制率和使誤差系統(tǒng)(12)穩(wěn)定,可以滿足控制目標(biāo)(9),進(jìn)而滿足控制目標(biāo)(3)、(4)。
2.2 協(xié)同編隊(duì)控制器設(shè)計(jì)
設(shè)計(jì)角速度滑模面為


(13)




(14)
設(shè)計(jì)速度的滑模面為


(15)







(16)
2.3 主要定理

證明:定義Lyapunov函數(shù)
對(duì)其求導(dǎo)并將式(13)代入,可以得到
將角速度式(14)代入上式,可以得出


設(shè)計(jì)如下Lyapunov函數(shù)

對(duì)其求導(dǎo)可以得出

將速度式(16)代入上式,可以得出



證明成立。
證明:分為以下三個(gè)步驟。


根據(jù)上式,可以得出

(17)

















速度控制率(16)等價(jià)于

(18)
設(shè)計(jì)Lyapunov函數(shù)

對(duì)上式進(jìn)行求導(dǎo),得出


將式(18)代入上式,得出











將式(18)代入上式可以得到





將上式分解為和,分別表示為




證明成立。
3 仿真驗(yàn)證
在本章中,用數(shù)值仿真來驗(yàn)證所提方法的有效性。考慮圖1所示的通信拓?fù)浣Y(jié)構(gòu),其中0表示虛擬領(lǐng)導(dǎo)者,1~4表示跟隨者。根據(jù)圖1,矩陣和分別設(shè)置為=[0 1 1 0; 1 0 0 0; 1 0 0 1; 0 0 1 0]和=diag{1,0,1,0}。

圖1 多無人機(jī)通信拓?fù)銯ig.1 Communication topology of multi-UAVs
初始位置為[(0),(0),(0)]=[15,10,20],(0)=[20,25,32,-2],(0)=[20,28,-3,2],(0)=[-20,30,40,-30]。期望編隊(duì)中心與各個(gè)跟隨者在方向和方向的期望距離分別為[-15,15,-15,15]和[-10,-10,10,10]。其他參數(shù)如表1所示。
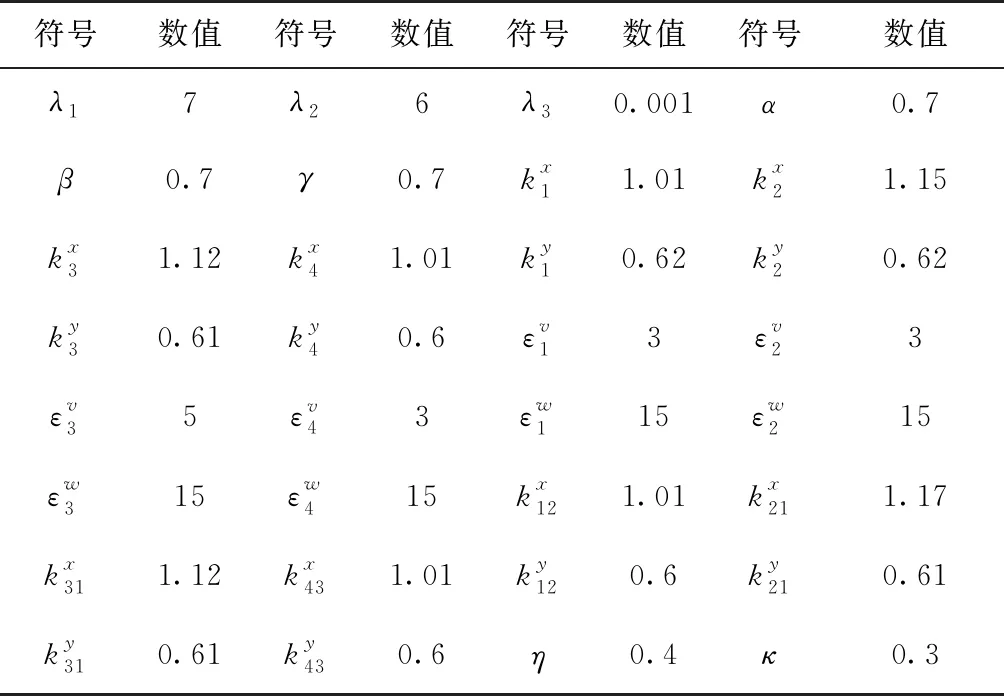
表1 仿真實(shí)驗(yàn)參數(shù)
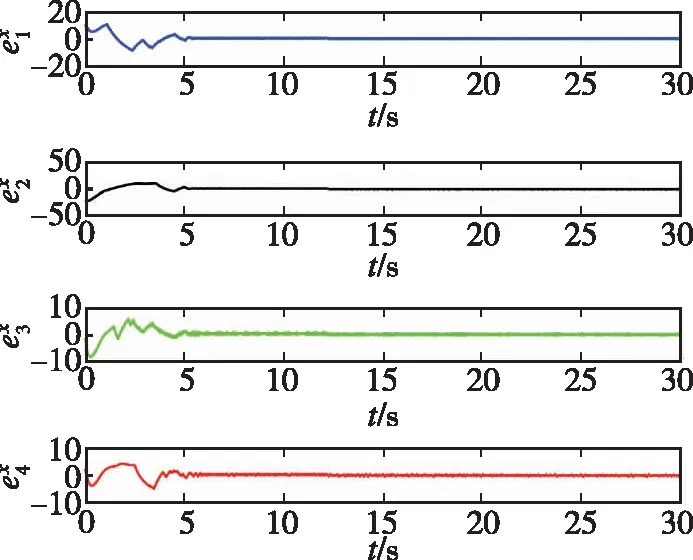
圖2所示為多無人機(jī)編隊(duì)軌跡,可以看出4架無人機(jī)能夠保持一個(gè)方形編隊(duì)并跟蹤上期望軌跡。圖3所示分別為角速度和速度滑模面的變化曲線。可以看出,本文所提控制算法能夠使速度與加速度滑模面快速收斂到零。圖4所示分別為跟隨者與領(lǐng)導(dǎo)者方向和方向的實(shí)際距離與期望距離誤差。可以看出,該誤差趨近于零,但存在一定的抖振。在實(shí)際應(yīng)用中,可采用飽和函數(shù)替換符號(hào)函數(shù),以減少抖振帶來的影響。
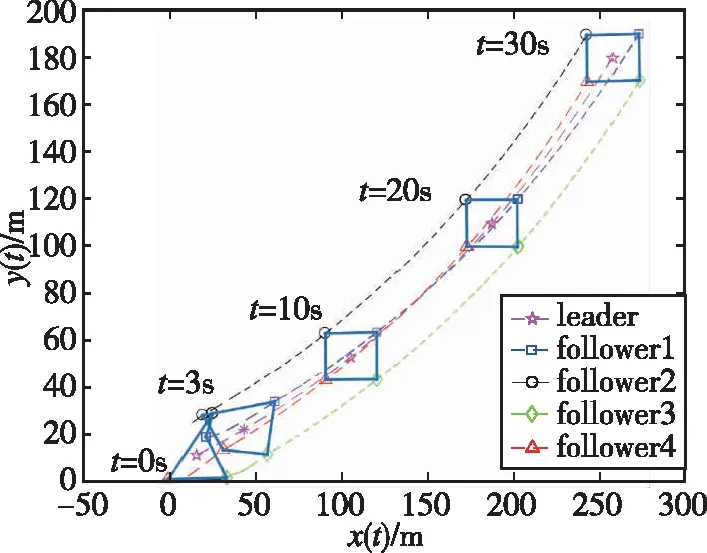
圖2 多無人機(jī)編隊(duì)軌跡(系統(tǒng)無不確定項(xiàng))Fig.2 Formation trajectories of multi-UAVs (no system uncertainty)
受到文獻(xiàn)[18]的啟發(fā),考慮實(shí)際系統(tǒng)往往存在不確定項(xiàng),本文的系統(tǒng)模型(1)可以表示為

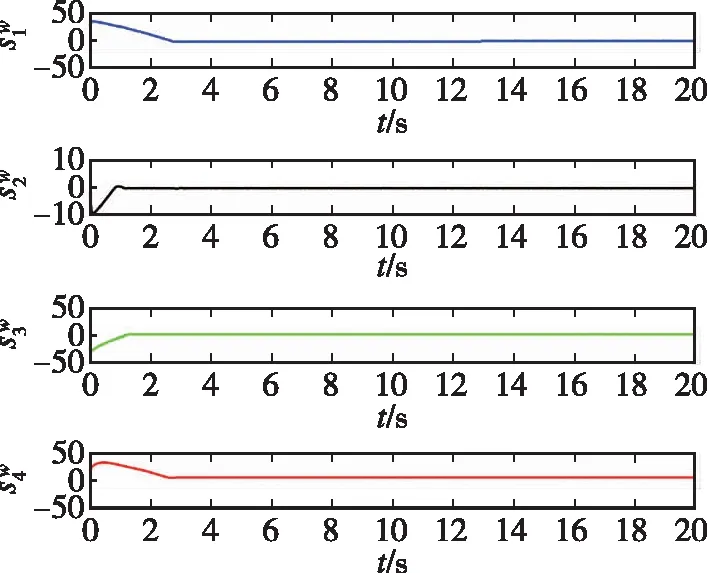
(a) 角速度
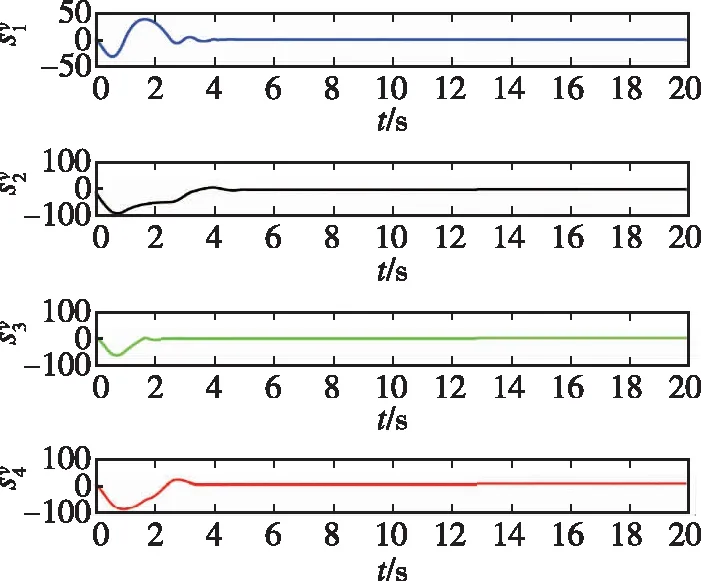
(b) 速度
(a) x向
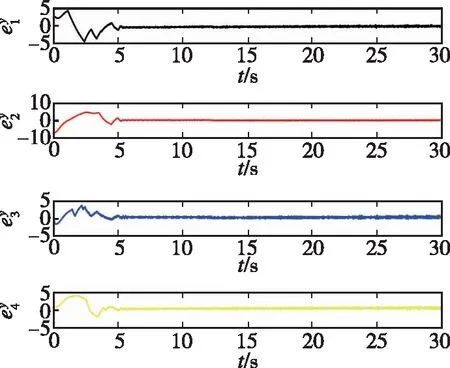
(b) y向
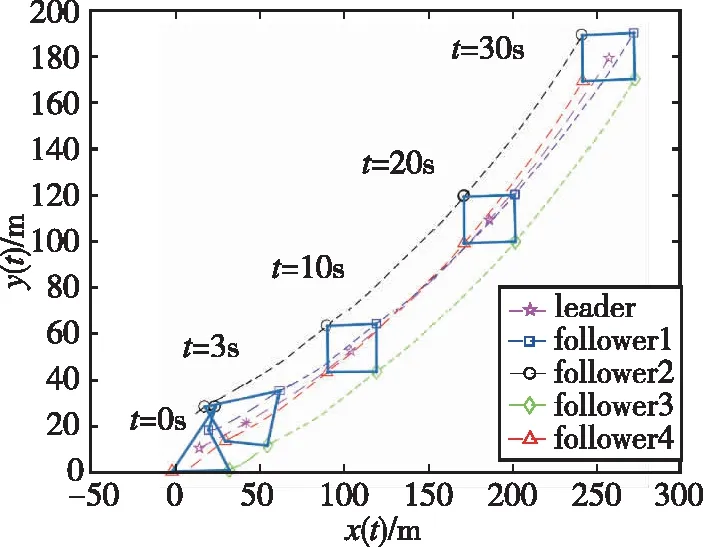
圖5 多無人機(jī)編隊(duì)軌跡(系統(tǒng)存在不確定項(xiàng))Fig.5 Formation trajectories of multi-UAVs(system uncertainty exists)
4 結(jié)論
針對(duì)一類具有非完整約束的多無人機(jī)系統(tǒng),提出了一種基于滑模的協(xié)同編隊(duì)控制算法。
1)采用分布式狀態(tài)觀測(cè)器,使所有跟隨者能夠在有限時(shí)間內(nèi)估計(jì)出虛擬領(lǐng)導(dǎo)者的狀態(tài)。利用該觀測(cè)器的估計(jì)狀態(tài),提出了一種基于滑模的協(xié)同編隊(duì)控制算法。基于李雅普諾夫穩(wěn)定性理論證明了多無人機(jī)系統(tǒng)的穩(wěn)定性。
2)在系統(tǒng)不存在和存在不確定項(xiàng)這兩種情況下,將所提算法應(yīng)用于5架無人機(jī)編隊(duì)控制中,得出的仿真結(jié)果顯示出多無人機(jī)系統(tǒng)最終能夠收斂到期望編隊(duì),并且能夠跟蹤上期望的運(yùn)動(dòng)軌跡。這表明所提算法是有效的并且具有一定的魯棒性。
3)本文所設(shè)計(jì)的方法僅適用于跟隨者之間的通信為無向的情況,在未來工作中,可考慮將此方法擴(kuò)展至跟隨者之間的通信是有向的情況,并且考慮固定翼無人機(jī)的的協(xié)同編隊(duì)控制問題。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32