GNSS多徑抑制基帶處理算法綜述
2022-10-09 01:27:12曾慶化邱文旗
導(dǎo)航定位與授時(shí) 2022年5期
關(guān)鍵詞:信號
邵 晨,曾慶化,2,3,邱文旗,許 睿
(1. 南京航空航天大學(xué)導(dǎo)航研究中心,南京 211106;2.先進(jìn)飛行器導(dǎo)航、控制與健康管理工業(yè)和信息化部重點(diǎn)實(shí)驗(yàn)室,南京 211106;3.衛(wèi)星通信與導(dǎo)航江蘇高校協(xié)同創(chuàng)新中心, 南京 211106)
0 引言
全球?qū)Ш叫l(wèi)星系統(tǒng)(Global Navigation Satellite System,GNSS)多徑效應(yīng)是指GNSS信號由于傳輸過程中存在遮擋,使接收信號中混有多徑信號,造成信號幅值、載波相位和偽碼延遲變化,引入定位解算誤差,從而影響接收機(jī)定位精度的現(xiàn)象。根據(jù)偽隨機(jī)噪聲碼(Pseudo Random Noise code,PRN)的自相關(guān)特性,當(dāng)多徑信號相對于直達(dá)信號的延遲在1個(gè)碼片之內(nèi)時(shí),接收機(jī)接收的合成信號和本地產(chǎn)生信號之間的相關(guān)函數(shù)發(fā)生畸變,產(chǎn)生解算誤差,這種由多徑效應(yīng)引起的誤差稱為多徑誤差。
隨著GNSS現(xiàn)代化進(jìn)程的推進(jìn),用戶對于定位精度的要求也越來越高。影響GNSS定位精度的誤差有很多,部分如鐘差、對流層誤差、電離層誤差等可以通過改善模型、差分技術(shù)等方法進(jìn)行抑制;而多徑誤差由于沒有空間相關(guān)性,很難通過上述方法削弱,在誤差源中的影響越來越大。因此,研究多徑抑制技術(shù)對提高衛(wèi)星導(dǎo)航定位精度具有重要意義。
由圖1可知,多徑誤差產(chǎn)生的環(huán)境分為視距(Line-of-Sight,LOS)環(huán)境和非視距(Non-Line-of-Sight,NLOS)環(huán)境,視距環(huán)境下接收信號中含有直射信號,而非視距環(huán)境下的接收信號中沒有直射信號。由于GNSS多徑抑制基帶處理算法僅適用于視距環(huán)境下多徑誤差的抑制,本文對非視距環(huán)境下的多徑誤差抑制技術(shù)不再詳述。
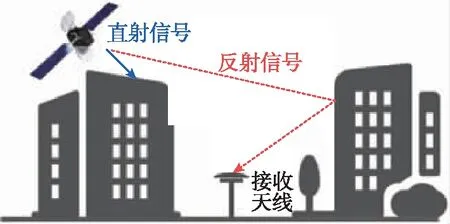
(a) 非視距環(huán)境
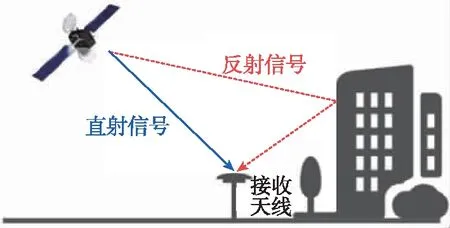
(b) 視距環(huán)境圖1 多徑誤差生成過程Fig.1 Generation of multipath errors
視距環(huán)境下,多徑誤差抑制技術(shù)分為天線增強(qiáng)技術(shù)、基帶處理算法和后處理技術(shù)三類,如圖2所示。

圖2 多徑抑制技術(shù)Fig.2 Multipath mitigation technique
天線增強(qiáng)技術(shù)通過改進(jìn)天線,使方向圖主瓣對準(zhǔn)直射信號方向,減少反射多徑信號的接收,該方法主要在硬件層面通過天線選址、特殊天線、安裝扼流圈等方式,抑制來自地面或低仰角的多徑信號,但難以消除來自空中的多徑信號。
基帶處理算法主要通過分析信號結(jié)構(gòu),改進(jìn)跟蹤環(huán),減小或消除多徑信號對于自相關(guān)函數(shù)的影響,從而減小多徑誤差。
后處理技術(shù)通過對接收機(jī)測量數(shù)據(jù)進(jìn)行后期處理以減小多徑誤差。如利用高斯牛頓方法跟蹤多徑增益及延遲參數(shù),利用后期建筑信息協(xié)助多徑判斷進(jìn)行選星,該類方法需要其他輔助信息和大量高精度測量數(shù)據(jù),多徑誤差抑制效果好但實(shí)時(shí)性較差。
上述多徑抑制技術(shù)中,基帶處理算法受信號體制影響較大,衛(wèi)星播發(fā)信號的不斷改善和發(fā)展給多徑抑制基帶處理算法的研究帶來了更大的機(jī)遇和挑戰(zhàn)。本文從信號體制角度出發(fā),對GNSS多徑抑制基帶處理算法的研究現(xiàn)狀,典型算法的基本原理、優(yōu)缺點(diǎn)和發(fā)展趨勢做了較為詳細(xì)的論述,其中部分典型算法如表1所示。
由表1可知,多徑抑制基帶算法目前的相關(guān)研究分為兩類:第一類是對傳統(tǒng)多徑抑制算法進(jìn)行研究,提高傳統(tǒng)算法的跟蹤精度和抗干擾性能,典型算法有窄相關(guān)技術(shù)、ELS、CCRW和MEDLL等;第二類是對新體制信號如北斗B1C、B2a信號等進(jìn)行研究,充分利用多峰、數(shù)據(jù)導(dǎo)頻分離、主瓣帶寬大等信號結(jié)構(gòu)特點(diǎn)來提高環(huán)路跟蹤性能,如基于去模糊的多徑抑制算法,能有效抑制或消除BOC信號的多峰特性從而避免誤鎖,同時(shí)獲得更好的抗多徑性能,典型算法有BPSK-like、Bump-Jump、ASPeCT、PCF等,下文對此進(jìn)行詳細(xì)討論。

表1 GNSS多徑抑制基帶處理典型算法
1 傳統(tǒng)多徑抑制算法
GNSS多徑信號對接收機(jī)信號處理的影響主要體現(xiàn)在兩方面:
一方面,合成信號本身引入了載波和偽距測量值誤差,直接影響跟蹤環(huán)路對偽距等重要導(dǎo)航信息的解算。
另一方面,碼跟蹤環(huán)通過接收信號與本地參考信號的相關(guān)函數(shù)進(jìn)行碼相位識別,如圖3所示,若接收信號中含有多徑信號,會(huì)使得本地信號和接收信號的相關(guān)函數(shù)發(fā)生畸變,鑒相器在判斷峰值位置時(shí)出現(xiàn)偏差,從而導(dǎo)致跟蹤誤差。
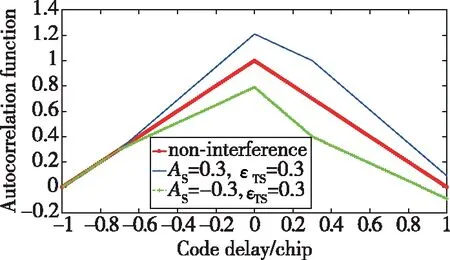
圖3 合成信號和直達(dá)信號歸一化相關(guān)函數(shù)Fig.3 Normalized correlation function of synthetic signal and direct signal
多徑信號也會(huì)對載波跟蹤產(chǎn)生影響,但由于多徑信號對碼環(huán)的影響遠(yuǎn)大于對載波環(huán)的影響,所以多徑抑制算法研究多在碼環(huán)。傳統(tǒng)多徑抑制算法從原理上主要分為參量式和非參量式,對于中長時(shí)延多徑的抑制效果較好。
1.1 非參量式
非參量算法通過改進(jìn)接收機(jī)的環(huán)路結(jié)構(gòu)和鑒相器函數(shù)以降低對多徑信號的敏感程度。1992年,文獻(xiàn)[6]提出了窄相關(guān)技術(shù),通過壓縮碼片間隔提高抗多徑性能。1994年,文獻(xiàn)[7]提出了ELS(Early Late Slope)技術(shù),通過對相關(guān)函數(shù)兩側(cè)斜率進(jìn)行估計(jì),判斷相關(guān)函數(shù)的畸變程度,跟蹤精度比窄相關(guān)技術(shù)更高。1996年,文獻(xiàn)[8]提出了Strobe相關(guān)器技術(shù),文獻(xiàn)[10]提出了脈沖間隙相關(guān)器(Pulse Aperture Correlator,PAC)技術(shù)。2002年,文獻(xiàn)[11]提出了碼相關(guān)參考波形(Code Correlation Reference Wavefo-rms,CCRW)技術(shù),通過改變本地碼波形獲得理想的鑒相函數(shù)以抑制多徑。2006年,文獻(xiàn)[12]在CCRW的基礎(chǔ)上提出了一種參考波形的設(shè)計(jì)方法,能夠獲得期望的相關(guān)函數(shù)。2009年,文獻(xiàn)[13]提出了高分辨率相關(guān)器(High Resolution Correlator,HRC)。2012年,文獻(xiàn)[14]提出了一種基于小波變換的多徑抑制方法,利用小波變換判斷偽碼相關(guān)函數(shù)的奇異點(diǎn),從而實(shí)現(xiàn)多徑抑制。2013年,文獻(xiàn)[15]在CCRW技術(shù)的基礎(chǔ)上進(jìn)一步研究了參考波形和閘寬對于多徑抑制的影響。2018年,文獻(xiàn)[16]提出了一種新的參考波形,對于高階BOC信號具有良好的多徑抑制效果。2020年,文獻(xiàn)[17]提出了一種可滿足多目標(biāo)約束條件的參考波形設(shè)計(jì)方法。其中,Strobe相關(guān)器、PAC和HRC統(tǒng)稱為Double-Delta技術(shù),相關(guān)器間距相同時(shí),該類技術(shù)的跟蹤精度較窄相關(guān)技術(shù)更高。CCRW技術(shù)通過設(shè)計(jì)不同的參考波形可以達(dá)到本地相關(guān)器線性組合的效果,相較于Double-Delta具備更為優(yōu)異的抗多徑性能。非參量式算法的跟蹤環(huán)路結(jié)構(gòu)簡單,跟蹤速度較快,但多徑性能受以下限制:1)受鑒相器性能和相關(guān)器間距的寬度限制等影響,不能完全消除多徑影響;2)受前端帶寬影響,前端帶寬越窄時(shí),相關(guān)峰越平,鑒相函數(shù)多徑分辨率越低,需要增加帶寬和信號采樣頻率,但會(huì)導(dǎo)致環(huán)路抗干擾和跟蹤性能下降。
1.1.1 窄相關(guān)技術(shù)
衛(wèi)星導(dǎo)航發(fā)展的早期,接收機(jī)碼跟蹤環(huán)的超前滯后相關(guān)器間距(Code Spacing)設(shè)置較大,一般為1個(gè)碼片,能夠減小初始捕獲時(shí)間,但是會(huì)導(dǎo)致碼環(huán)鑒相器函數(shù)單調(diào)范圍較寬,跟蹤精度較低,無法滿足高精度定位需求。1992年,NovAtel公司提出了窄相關(guān)技術(shù)以提高跟蹤精度。窄相關(guān)的碼跟蹤鑒相器是超前碼與滯后碼相減得到的,該技術(shù)通過減小相關(guān)器間距,提高鑒相器對峰值點(diǎn)的靈敏度,降低多徑信號帶來的誤差,但是不能完全消除多徑誤差,具有一定局限性。一般而言,相關(guān)器間距越小,多徑誤差包絡(luò)面積越小,抗多徑性能越好,但隨著相關(guān)器間距的減小,環(huán)路穩(wěn)定性能變差,容易造成失鎖等現(xiàn)象。
1.1.2 Double-Delta技術(shù)
Double-Delta技術(shù)通過兩對相關(guān)器構(gòu)建鑒相函數(shù),主要包括HRC技術(shù)、Strobe相關(guān)器技術(shù)等。鑒相函數(shù)表達(dá)式為

(1)
其中,、、、為兩組超前滯后相關(guān)值,相距2,通過選取不同的值達(dá)到不同的效果。HRC技術(shù)選取的值為1,Strobe相關(guān)器則為2,兩者抗多徑性能相近。
圖4中,表示偽碼延遲,表示相關(guān)函數(shù)。由圖4可知,相關(guān)器間距越小,Double-Delta的抗多徑能力越強(qiáng),相關(guān)器間距相同時(shí),Double-Delta技術(shù)的抗多徑性能要優(yōu)于窄相關(guān)技術(shù)。
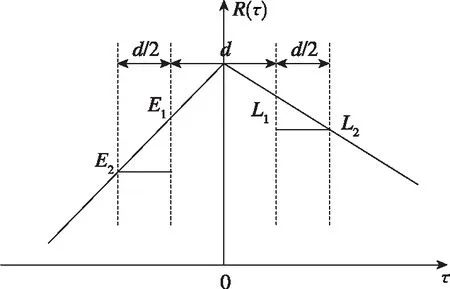
圖4 Double-Delta技術(shù)Fig.4 Double-Delta technology
1.1.3 ELS技術(shù)
1994年,文獻(xiàn)[7]提出了ELS技術(shù),相較于Dou-ble-Delta技術(shù),ELS技術(shù)同樣是使用兩組相關(guān)器,但是鑒相器設(shè)計(jì)的原理不同。ELS技術(shù)利用多徑信號導(dǎo)致碼相關(guān)函數(shù)在峰值兩側(cè)主瓣的坡度不同這一特性,對峰值兩側(cè)坡度進(jìn)行估計(jì),從而準(zhǔn)確得出峰值的位置。
由圖5可知,、、、為兩組超前滯后相關(guān)值,ELS技術(shù)計(jì)算得到的多徑誤差為峰值兩側(cè)直線交點(diǎn)的橫坐標(biāo),、、分別為相鄰相關(guān)器之間的間隔,一般取==12,此時(shí)鑒相器表達(dá)式為

(2)
與窄相關(guān)技術(shù)類似,相關(guān)器間隔越小,抗多徑性能越好。ELS技術(shù)依賴于兩側(cè)相關(guān)函數(shù)斜率估計(jì)的準(zhǔn)確度,抗多徑性能與窄相關(guān)技術(shù)相比有明顯的提升,但是在信噪比較低時(shí),斜率的估計(jì)往往不夠準(zhǔn)確,會(huì)造成較大的誤差。
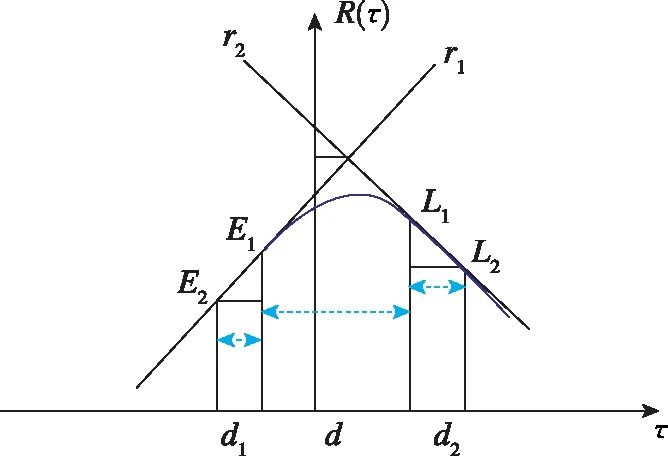
圖5 ELS技術(shù)Fig.5 ELS technology
1.1.4 CCRW技術(shù)
2002年,文獻(xiàn)[11]提出了CCRW技術(shù),經(jīng)過多次改進(jìn)已較為成熟。該方法的原理是通過設(shè)計(jì)特殊的參考波形作為本地碼,將其與接收信號相關(guān)后得到不同的鑒相曲線,抗多徑性能與參考波形設(shè)計(jì)相關(guān)。基本參考波形主要有兩類:第一類僅在碼片變化處產(chǎn)生參考波形,第二類在每個(gè)碼片邊緣處產(chǎn)生并隨之變化,部分波形的產(chǎn)生方式如圖6所示。
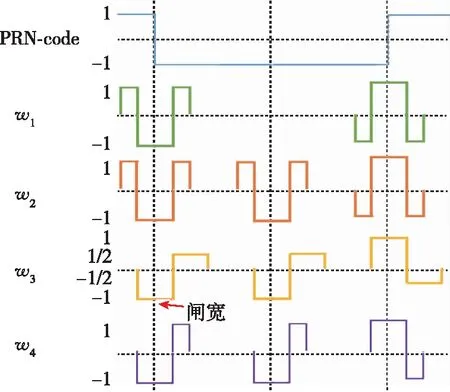
圖6 CCRW參考波形Fig.6 Reference waveform of CCRW
不同參考波形可以選擇相同的鑒相函數(shù),歸一化表達(dá)式為
(3)
其中,、分別為同相、正交分量的即時(shí)相關(guān)值;、分別為同相、正交分量的參考波相關(guān)值。當(dāng)參考波形為矩形碼時(shí),CCRW技術(shù)與窄相關(guān)技術(shù)等效,參考波形為時(shí),CCRW技術(shù)與Double-Delta技術(shù)等效。通過選擇不同的參考波,CCRW可以達(dá)到與其他非參量式算法類似的效果,無需增加額外相關(guān)器,環(huán)路簡單。參考波的閘寬越小,多徑抑制性能越好,參考波形為和時(shí),抗多徑性能比Double-Delta技術(shù)更優(yōu)。
1.2 參量式
參量式算法的原理是通過大量的相關(guān)器獲取多徑信號的特征參數(shù)觀測值,再通過估計(jì)算法得到多徑參數(shù)最優(yōu)估計(jì)值,最后剝離出直射信號。1995年,文獻(xiàn)[20]提出了多徑消除延遲鎖相環(huán)(Multipath Estimation Delay Locked Loop,MEDLL)技術(shù),通過估計(jì)多徑參數(shù)有效抑制中長時(shí)延多徑信號,但該方法計(jì)算量大,實(shí)時(shí)性較差。1997年,文獻(xiàn)[21]提出了多徑消除技術(shù)(Multipath Mitigation Technology,MMT),在MEDLL的基礎(chǔ)上通過預(yù)先假設(shè)多徑個(gè)數(shù),簡化多徑模型,降低了計(jì)算量。2009年,文獻(xiàn)[22]提出了Vision相關(guān)器(Vision Correlator)技術(shù),通過精確測量碼片過渡時(shí)刻的射頻信號性能,提取清晰的碼片過渡時(shí)刻波形,再剝離多徑信號,多徑性能相較于MMT得到進(jìn)一步提高和優(yōu)化。這類方法對中長時(shí)延多徑誤差的抑制效果好,跟蹤精度高,但是由于需要估計(jì)多徑信號并進(jìn)行剝離,所以需要較多的相關(guān)器,跟蹤環(huán)路結(jié)構(gòu)較為復(fù)雜,計(jì)算量較大。除此之外,隨著濾波和智能算法研究的深入,一些改進(jìn)算法相繼被提出。2017年,文獻(xiàn)[23]采用遺傳粒子濾波對多徑信號進(jìn)行估計(jì),提高了多徑估計(jì)的精度。2018年,文獻(xiàn)[24]提出了基于差分進(jìn)化(Differential Evolution,DE)改進(jìn)粒子濾波的多徑估計(jì)算法,提高了非高斯噪聲下的估計(jì)精度。2019年,文獻(xiàn)[25]提出了利用擴(kuò)展卡爾曼濾波(Extended Kalman Filter,EKF)提高M(jìn)EDLL的多徑估計(jì)精度。同年,文獻(xiàn)[26]利用信息論學(xué)習(xí)實(shí)現(xiàn)多徑估計(jì),該算法無需假設(shè)多徑數(shù)目,能夠快速實(shí)現(xiàn)參數(shù)估計(jì)。其他還有利用Newton法優(yōu)化求解,加入TK算子降低計(jì)算復(fù)雜度等針對最大似然估計(jì)算法的改進(jìn)。參量式算法需要估計(jì)多徑信號的特征信息,跟蹤精度相對于非參量式算法更高,但環(huán)路設(shè)計(jì)復(fù)雜,計(jì)算量較大。
接下來以MEDLL技術(shù)為例介紹參量式算法的實(shí)現(xiàn)過程,該技術(shù)是一種基于多徑模型的參數(shù)估計(jì)方法,通過最大似然估計(jì)算法估計(jì)多徑偽碼延遲、載波延遲和幅值。

圖7 MEDLL跟蹤環(huán)Fig.7 Tracking loop of MEDLL
由圖7可知,中頻信號分別與本地載波sin()、cos()相乘分為(同相)分量和(正交)分量,之后分別進(jìn)入2+1個(gè)相關(guān)器,每個(gè)相關(guān)器間隔為個(gè)碼片。整個(gè)跟蹤過程中含有大量待估參數(shù),一般使用迭代求解。迭代過程分為參數(shù)估計(jì)、相關(guān)峰恢復(fù)和檢測流程控制。其中,參數(shù)估計(jì)過程為假設(shè)輸入僅有一路信號,估計(jì)該信號幅值、載波相位和偽碼延遲;相關(guān)峰恢復(fù)過程為根據(jù)給定的幅值、載波相位和偽碼延遲,輸出估計(jì)的相關(guān)峰波形;檢測流程為根據(jù)估計(jì)波形的殘差預(yù)設(shè)多徑路數(shù),判斷是否進(jìn)行下一輪迭代。針對檢測流程繁瑣的問題,文獻(xiàn)[29]提出了一種改進(jìn)的MEDLL技術(shù),該算法通過設(shè)定接收信號中最大路徑數(shù)進(jìn)行余量估計(jì),能夠有效提高直射信號的估計(jì)效率,但是依舊沒有解決MEDLL需要大量相關(guān)器、計(jì)算量大的主要問題。MEDLL算法是目前最有效的多徑檢測和估計(jì)算法之一,跟蹤精度較高,實(shí)時(shí)性較差,多徑抑制性能主要受噪聲影響。
1.3 傳統(tǒng)多徑抑制算法應(yīng)用挑戰(zhàn):短時(shí)延多徑
一般而言,以上方法可以在多數(shù)場合發(fā)揮較好的多徑抑制作用,然而它們都有一個(gè)共同的缺陷,當(dāng)面對短時(shí)延多徑信號(多徑延遲小于0.5碼片)時(shí),上述方法的抗多徑性能會(huì)有一定的下降。短時(shí)延多徑信號是多徑信號中的一類特殊信號,兩者具有相似的特性,但短多徑信號的延遲更小。短多徑抑制技術(shù)的難點(diǎn)在于短多徑中直達(dá)信號的剝離和延遲的估計(jì)。關(guān)于短多徑抑制算法的研究如下,2009年,文獻(xiàn)[30]在HRC相關(guān)器中增加了修正因子以減小短多徑誤差。2010年,文獻(xiàn)[31]提出了一種基于斜率的多徑估計(jì)(the Slope-Based Multipath Estimation,SBME)方法,這種方法能夠很好地抑制延遲小于0.35碼片的短多徑信號。2011年,文獻(xiàn)[32]提出了一種新型碼環(huán)路鑒相器(Short Multipath Insensitive Code Loop Discriminator,SMICLD),這種方法碼環(huán)路簡單,對短時(shí)延多徑有較好的抑制效果。2012年,文獻(xiàn)[33]在SMICLD的基礎(chǔ)上進(jìn)行改進(jìn),提出了MSMICD鑒相器,該方法計(jì)算量小,處理同相多徑信號時(shí)性能優(yōu)于SMICLD。2014年,文獻(xiàn)[34]提出了改進(jìn)窄相關(guān)的短多徑抑制方法,在傳統(tǒng)窄相關(guān)器的基礎(chǔ)上,額外增加一個(gè)相關(guān)器用于對短時(shí)延多徑誤差進(jìn)行定量估計(jì)并實(shí)時(shí)修正。同年,文獻(xiàn)[1]提出了在Strobe相關(guān)器算法中引入修正因子,對碼環(huán)鑒相器進(jìn)行修正以抑制短多徑。2019年,文獻(xiàn)[35]提出了一種改進(jìn)的對短多徑不敏感的Strobe鑒相(Modified Short Multipath Insensitive Strobe Discriminator,MSMISD)算法,通過構(gòu)造延遲相關(guān)值和設(shè)計(jì)反相多徑補(bǔ)償因子抑制短多徑,相較于傳統(tǒng)Strobe相關(guān)器抗多徑性能更好。短延時(shí)多徑抑制基帶處理算法研究相對較少,大都是在傳統(tǒng)長時(shí)延多徑抑制算法的基礎(chǔ)上進(jìn)行改進(jìn),精度和抗干擾性能還有待提高。
2 新體制信號多徑抑制算法
隨著衛(wèi)星導(dǎo)航定位系統(tǒng)的發(fā)展,現(xiàn)代化衛(wèi)星導(dǎo)航系統(tǒng)通過采用二進(jìn)制偏移載波(Binary Offset Carrier,BOC)調(diào)制和混合二進(jìn)制偏移載波(Multiplexed Binary Offset Carrier,MBOC)調(diào)制解決頻段擁擠的問題。BOC信號的數(shù)學(xué)模型表示如下
()=(-)cos(2π+)
(4)
=sign(sin(2π+))
(5)
其中,為信號幅值;為PRN碼;為偽碼延遲(單位是碼片);為載波頻率;為載波相位;為方波子載波;為子載波頻率;決定子載波類型,取0時(shí)為sin-boc,取 12π時(shí)為cos-boc。
新體制信號從信號設(shè)計(jì)的角度減小多徑誤差,帶來更高性能的同時(shí)提升了接收機(jī)設(shè)備的設(shè)計(jì)復(fù)雜度。現(xiàn)代化GNSS部分信號已采用BOC調(diào)制或在其基礎(chǔ)上進(jìn)行變形的調(diào)制方式,如北斗的B1C信號采用QMBOC調(diào)制,Galileo系統(tǒng)中E1信號采用CBOC調(diào)制和GPS中L1C采用TMBOC調(diào)制等。
新體制信號多徑抑制算法針對于新體制信號設(shè)計(jì),主要分為兩類:一類是基于去模糊的多徑抑制算法,另一類是針對不同信號特性設(shè)計(jì)的處理方法。
2.1 基于去模糊的多徑抑制算法
BOC、MBOC信號雖然有著良好的抗多徑性能,但是由于其自相關(guān)函數(shù)的多峰特性,容易導(dǎo)致跟蹤環(huán)路發(fā)生誤鎖現(xiàn)象,在使用Strobe相關(guān)器、HRC等常用多徑抑制算法時(shí),在±0.5碼片附近存在模糊點(diǎn)。為解決該問題,一般采用基于去模糊的多徑抑制算法,這類方法由去模糊算法和傳統(tǒng)多徑抑制算法組成。首先通過去模糊算法解決BOC信號的模糊性問題,降低多徑敏感度,再通過傳統(tǒng)多徑抑制算法進(jìn)一步提高多徑抑制性能。由于傳統(tǒng)多徑抑制算法上文已提及,接下來具體闡述去模糊算法的發(fā)展歷程。
1999年,文獻(xiàn)[38]提出了峰跳法(Bump-Jump),在傳統(tǒng)BPSK跟蹤方法的基礎(chǔ)上增加了遠(yuǎn)超前和遠(yuǎn)滯后相關(guān)器,監(jiān)測主峰兩側(cè)相關(guān)峰值,判斷是否鎖定在主峰,該方法需要積累較長的時(shí)間來完成失鎖檢測。2000年,文獻(xiàn)[39]提出了非相干邊帶算法,通過對BOC信號進(jìn)行單邊帶濾波消除多峰特性,但是該算法會(huì)造成信號能量的浪費(fèi),導(dǎo)致跟蹤精度降低。2003年,文獻(xiàn)[40]提出了一種基于子載波相關(guān)的去模糊算法。2004年,文獻(xiàn)[41]提出了一種亞載波相位消除的去模糊算法,這類方法通過消除矩形波的方式獲得單峰相關(guān)函數(shù)。2006年,文獻(xiàn)[42]提出了BPSK-like算法,相較于非相干邊帶法的優(yōu)點(diǎn)在于能夠同時(shí)利用兩個(gè)邊帶能量,提高接收機(jī)處理的衛(wèi)星信號能量。2007年,文獻(xiàn)[43]提出了信號相關(guān)邊峰消除(Autocorrelation Side-Peak Cancellation Technique, ASPeCT)算法。同年,文獻(xiàn)[44]提出了一種基于偽相關(guān)函數(shù)(Pseudo Correlation Function,PCF)的算法。2013年,文獻(xiàn)[48]提出了一種MBOC信號去模糊算法,設(shè)計(jì)了雙超前減滯后鑒相器去除MBOC信號的多峰性。2014年,文獻(xiàn)[49]提出了一種基于PCF算法的CBOC信號去模糊算法,跟蹤性能更優(yōu)。2018年,文獻(xiàn)[50]提出了一種基于CCRW算法的QMBOC信號去模糊算法,能有效消除多峰性,但由于閘波設(shè)計(jì)不便,具有一定局限性。
采用去模糊算法消除BOC信號的多峰性是后續(xù)使用鑒相器改進(jìn)、參數(shù)估計(jì)等傳統(tǒng)多徑抑制算法的前提,同時(shí)可以通過構(gòu)造特殊相關(guān)函數(shù)進(jìn)一步提高整個(gè)算法的多徑抑制性能。接下來對ASPeCT、PCF等典型去模糊算法進(jìn)行介紹,這類方法通過多個(gè)互相關(guān)函數(shù)的非線性組合對原相關(guān)函數(shù)進(jìn)行改進(jìn),重構(gòu)的相關(guān)函數(shù)的多峰性大大減弱,從而減小了跟蹤環(huán)路誤鎖的可能性。
2.1.1 ASPeCT算法
2007年,文獻(xiàn)[43]提出了ASPeCT算法,經(jīng)過多次改進(jìn)已較為成熟。該算法是一種基于自相關(guān)邊峰消除技術(shù)的跟蹤算法,利用BOC信號與PRN碼的互相關(guān)函數(shù)和BOC信號的自相關(guān)函數(shù),對碼環(huán)路相關(guān)結(jié)果進(jìn)行重構(gòu),重構(gòu)之后的相關(guān)函數(shù)為

(6)
其中,()是BOC信號的自相關(guān)函數(shù);()是BOC信號和本地PRN序列的互相關(guān)函數(shù);是調(diào)節(jié)因子,其取值影響ASPeCT相關(guān)函數(shù)中兩個(gè)較小邊鋒的大小,需要根據(jù)應(yīng)用的不同需求進(jìn)行調(diào)整。
由圖8可知,BOC(,)信號與本地偽碼序列的互相關(guān)函數(shù)曲線關(guān)于原點(diǎn)中心對稱,且存在兩個(gè)峰值。這兩個(gè)峰值的碼相位延遲與BOC(,)信號自相關(guān)函數(shù)的兩個(gè)邊峰所在的碼相位延遲相同,位于±0.5碼片處。由于兩側(cè)峰峰值符號相反,ASPeCT算法利用平方運(yùn)算消除符號對相關(guān)峰的影響,從而削弱側(cè)峰對整個(gè)偽碼跟蹤環(huán)路的影響。ASPeCT算法構(gòu)建的相關(guān)函數(shù)沒有削弱主峰的幅值和寬度,保持了BOC(,)信號原有的特性,跟蹤性能上優(yōu)于傳統(tǒng)的BPSK跟蹤方法;但是該方法并不能完全消除自相關(guān)邊峰,在主峰的兩側(cè)仍然留有兩個(gè)較小的邊峰,初始相位較大時(shí)可能會(huì)導(dǎo)致跟蹤不穩(wěn)定。針對該問題,文獻(xiàn)[51]提出了改進(jìn)ASPeCT算法相關(guān)函數(shù),構(gòu)建一個(gè)無邊峰的相關(guān)函數(shù),新相關(guān)函數(shù)的相關(guān)主峰相對于改進(jìn)前更寬,這會(huì)導(dǎo)致環(huán)路的跟蹤精度降低,但是新相關(guān)函數(shù)只有一個(gè)主峰,完全消除了邊峰的影響,穩(wěn)定性更好。ASPeCT算法構(gòu)建的相關(guān)函數(shù)只能消除BOC(,)的邊峰影響,對于BOC(,)信號和MBOC信號不適用。
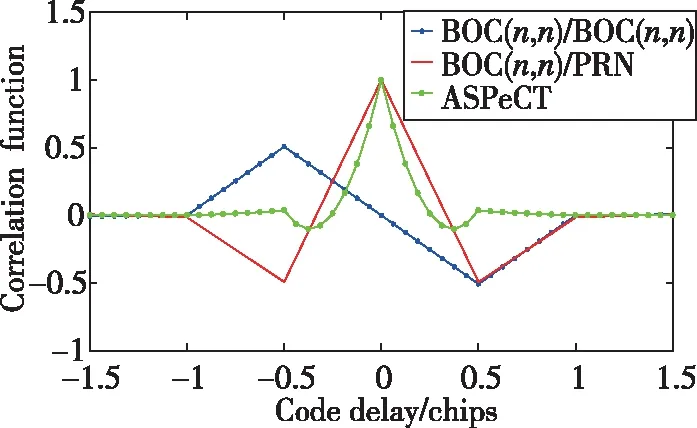
圖8 ASPeCT歸一化相關(guān)函數(shù)Fig.8 Normalized correlation function of ASPeCT
2.1.2 PCF算法
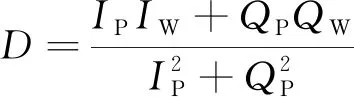
2007年,文獻(xiàn)[44]提出了PCF算法,經(jīng)過多次改進(jìn)已較為成熟,是一種通過構(gòu)建偽相關(guān)函數(shù)實(shí)現(xiàn)無模糊跟蹤的算法。PCF算法的主要原理為:在中頻信號處理過程中構(gòu)建兩組本地參考信號()和(),分別與接收信號進(jìn)行相關(guān)運(yùn)算,相關(guān)函數(shù)為()和(),最后利用相關(guān)結(jié)果構(gòu)建無相關(guān)邊峰的偽相關(guān)函數(shù),跟蹤性能受寬度因子影響。相關(guān)函數(shù)為
()=|()|+|()|-
|()+()|
(7)
相關(guān)函數(shù)圖像如圖9所示。
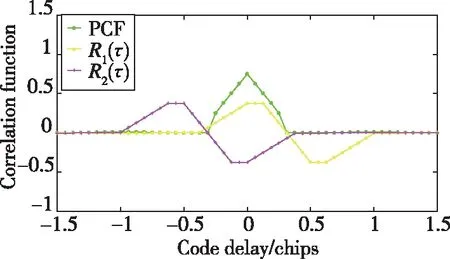
圖9 PCF歸一化相關(guān)函數(shù)Fig.9 Normalized correlation function of PCF
由圖9可知,PCF算法能夠徹底消除BOC信號的多峰性,同時(shí)利用合適的寬度因子獲得更窄的相關(guān)主峰和更好的抗多徑性能。2021年,文獻(xiàn)[52]提出了一種子函數(shù)組合相關(guān)的無模糊跟蹤算法,有效地適用于對BOC(,)和CBOC(6,1,1/11)信號的跟蹤,但是與PCF算法相似,需要設(shè)計(jì)特殊的參考波形,組合函數(shù)在實(shí)現(xiàn)無模糊的同時(shí)會(huì)損失一部分跟蹤性能。
2.2 其他處理方法
新體制信號多徑抑制算法除了去模糊算法與傳統(tǒng)多徑抑制算法組合的方式之外,還可以根據(jù)信號結(jié)構(gòu)特征設(shè)計(jì)特殊算法,提高信號利用功率和多徑抑制性能。該類方法已實(shí)現(xiàn)工程應(yīng)用的有聯(lián)合跟蹤、TM61跟蹤算法和雙重估計(jì)技術(shù)等。
2.2.1 聯(lián)合跟蹤
部分新體制信號為數(shù)據(jù)、導(dǎo)頻分離的結(jié)構(gòu),數(shù)據(jù)分量包含電文信息,用于獲取偽距和導(dǎo)航信息,導(dǎo)頻分量僅有擴(kuò)頻碼,不包含電文信息,從而增加了相干積分時(shí)間,精度更高。傳統(tǒng)的多徑抑制算法僅針對單路信號進(jìn)行觀測量的估計(jì),這會(huì)造成有用功率的浪費(fèi),從而導(dǎo)致跟蹤精度的降低,針對該問題,可以使用聯(lián)合跟蹤算法解決。2002年,文獻(xiàn)[54]針對L5信號提出了鑒相器和濾波器層面的聯(lián)合跟蹤方法,并研究了該方法的適用性。2010年,文獻(xiàn)[55]針對E1信號提出了數(shù)據(jù)/導(dǎo)頻聯(lián)合捕獲跟蹤算法,提高了捕獲跟蹤的穩(wěn)定性。2011年,文獻(xiàn)[56]提出了不同權(quán)重的非相干和相干數(shù)據(jù)/導(dǎo)頻聯(lián)合方法,提高了信號的利用率。同年,文獻(xiàn)[57]針對L5信號提出了三種復(fù)雜度不同的聯(lián)合跟蹤方法,分別為相關(guān)器輸出聯(lián)合、鑒相器輸出聯(lián)合和濾波器輸出聯(lián)合。2013年,文獻(xiàn)[15]提出了聯(lián)合多徑抑制算法,將CBOC信號的導(dǎo)頻和數(shù)據(jù)通道利用碼參考波形技術(shù)實(shí)現(xiàn)多徑抑制,再進(jìn)行非相干合并消除BOC(6,1)分量的影響,達(dá)到了該信號的多徑抑制極限。2018年,文獻(xiàn)[58]針對B1C信號,采用導(dǎo)頻輔助數(shù)據(jù)聯(lián)合跟蹤和數(shù)據(jù)/導(dǎo)頻幅值聯(lián)合跟蹤,提高了跟蹤的精度和穩(wěn)定性。2019年,文獻(xiàn)[51]分析比較了三種聯(lián)合跟蹤算法的跟蹤精度和抗多徑性能,為以后的研究提供參考。2020年,文獻(xiàn)[59]提出了一種B1C信號的無模糊捕獲算法,采用數(shù)據(jù)/導(dǎo)頻非相干組合的捕獲策略,實(shí)現(xiàn)了B1C信號的無模糊捕獲。同年,文獻(xiàn)[60]提出了一種基于EKF的數(shù)據(jù)/導(dǎo)頻聯(lián)合跟蹤方法,在聯(lián)合跟蹤模型的基礎(chǔ)上引入卡爾曼濾波器,進(jìn)一步減小跟蹤誤差。
由圖10可知,聯(lián)合跟蹤方式分為相關(guān)器、鑒相器和濾波器三類。相關(guān)器聯(lián)合通過數(shù)據(jù)和導(dǎo)頻相關(guān)積分進(jìn)行組合,需要判斷電文與二次碼符號,環(huán)路結(jié)構(gòu)最簡單,但是在低載噪比時(shí)符號判斷受影響,從而導(dǎo)致精度下降。鑒相器聯(lián)合通過信號發(fā)射功率比對數(shù)據(jù)和導(dǎo)頻鑒相器輸出進(jìn)行加權(quán)組合,環(huán)路結(jié)構(gòu)相比相關(guān)器聯(lián)合更復(fù)雜,在低載噪比環(huán)境下精度更高。濾波器聯(lián)合通過信號發(fā)射功率比對數(shù)據(jù)和導(dǎo)頻環(huán)路濾波器輸出進(jìn)行加權(quán)組合,復(fù)雜度最高,在低載噪比環(huán)境下精度最高。
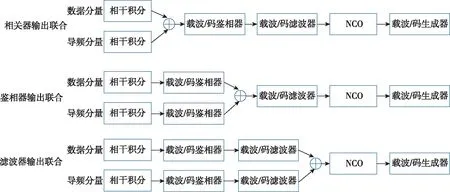
圖10 聯(lián)合跟蹤結(jié)構(gòu)Fig.10 Combined tracking structure
2.2.2 TM61跟蹤算法
TM61跟蹤最早是由ENAC的信號處理實(shí)驗(yàn)室針對于TMBOC(6,1,1/11)信號提出的。2007年,文獻(xiàn)[61]將其用于跟蹤C(jī)BOC(6,1,1/11)信號。2019年,文獻(xiàn)[51]研究了TM61跟蹤在QMBOC調(diào)制信號上的應(yīng)用。
由圖11可知,TM61算法中延遲鎖定環(huán)P(即時(shí))支路將BOC(1,1)分量與接收信號進(jìn)行相關(guān)運(yùn)算,利用BOC(1,1)信號的高功率特性獲取接收信號的數(shù)據(jù)信息;E(超前)和L(滯后)支路采用接收信號與本地BOC(6,1)信號進(jìn)行互相關(guān),利用BOC(6,1)信號的高精度特性對接收信號進(jìn)行跟蹤。該算法充分利用了BOC(1,1)信號和BOC(6,1)信號的特性,抗多徑能力強(qiáng)。但是該算法有兩個(gè)缺點(diǎn),一是TM61跟蹤是僅適用于BOC(1,1)信號和BOC(6,1)信號復(fù)用調(diào)制的信號,具有一定局限性;二是由于該方法并沒有充分利用MBOC信號的能量,跟蹤精度低于使用復(fù)用信號的相關(guān)結(jié)果。
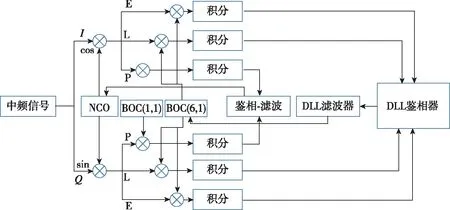
圖11 TM61算法跟蹤環(huán)路Fig.11 TM61 tracking loop structure
2.2.3 雙重估計(jì)技術(shù)
由式(4)、式(5)可知,BOC調(diào)制的原理是在原有BPSK調(diào)制的基礎(chǔ)上,加上一個(gè)二進(jìn)制副載波對BPSK信號進(jìn)行二次擴(kuò)頻。針對該類信號,2008年,文獻(xiàn)[66]提出了雙重估計(jì)技術(shù)(Dual Estimate Technology,DET),分別使用碼環(huán)和副載波環(huán)對偽碼和副載波進(jìn)行跟蹤。2018年,文獻(xiàn)[67]提出了一種基于改善DET的多徑抑制算法,設(shè)計(jì)了一種DET雙環(huán)交互互相關(guān)函數(shù),多徑抑制性能高于傳統(tǒng)DET算法。
DET方法的原理是將本地偽碼信號和本地副載波信號分離,分別進(jìn)行相關(guān)。從偽碼層面看,相關(guān)函數(shù)與BPSK偽碼相關(guān)函數(shù)形狀類似,具有單峰性,但是精度較低。從副載波層面看,精度較高,但是具有模糊度。通過兩者的非線性組合可以取得精度較高且無模糊度的結(jié)果,DET的性能由副載波跟蹤精度決定。目前,副載波跟蹤方式可以分為兩種:一種是延遲鎖定環(huán)跟蹤(Subcarrier Delay Loc-ked Loops,SDLL)方式,該方式計(jì)算復(fù)雜度較低,要求的硬件資源少,考慮到應(yīng)用實(shí)現(xiàn)難度,一般用于偽碼速率較低或BOC階數(shù)較低的信號;另一種是鎖相環(huán)跟蹤(Subcarrier Phase Locked loops,SPLL)方式,對軟硬件要求較高,在跟蹤精度和抗多徑性能上相對于SDLL具有優(yōu)勢,一般適用于偽碼速率較高或BOC階數(shù)較高的信號。
3 結(jié)論與展望
目前,GNSS多徑抑制基帶處理算法相關(guān)研究如圖12所示,按信號體制可以分為傳統(tǒng)多徑抑制算法和新體制信號多徑抑制算法。傳統(tǒng)多徑抑制算法主要針對于BPSK信號,分為非參量式和參量式,其中非參量式算法通過改進(jìn)鑒相器,降低其對于多徑的敏感性,提高抗多徑性能,該類方法環(huán)路簡單,計(jì)算量較小;參量式算法需要估計(jì)多徑信號的特征,跟蹤精度較高,計(jì)算量較大。新體制信號多徑抑制算法針對于BOC、MBOC信號,按實(shí)現(xiàn)方式分為兩類:第一類是基于去模糊的多徑抑制算法,這類方法適用范圍較廣,首先去除信號多峰性,然后改善傳統(tǒng)算法的多徑抑制性能,進(jìn)一步提高跟蹤精度;第二類是針對特殊信號結(jié)構(gòu)的處理算法,此類方法根據(jù)不同的信號結(jié)構(gòu)進(jìn)行設(shè)計(jì),提高信號在跟蹤過程中的利用功率,從而提高跟蹤精度,相較于第一類方法精度更高,但適用范圍更窄。
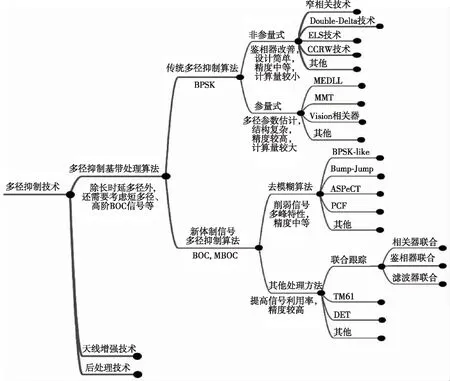
圖12 多徑抑制基帶處理算法框架Fig.12 Framework of multipath mitigation baseband processing algorithm
由上述分析可知,GNSS多徑抑制基帶處理算法相關(guān)研究面對的挑戰(zhàn)主要有兩方面:一方面是越來越復(fù)雜的應(yīng)用場景對多徑抑制算法魯棒性、快速性、準(zhǔn)確性提出更高的要求;另一方面是不斷發(fā)展的衛(wèi)星信號體制使得多徑抑制算法需要向針對性、高效性的方向發(fā)展。隨著衛(wèi)星信號設(shè)計(jì)和信號處理技術(shù)的不斷發(fā)展,多徑抑制基帶處理算法也需要隨之不斷進(jìn)步,從而進(jìn)一步提升衛(wèi)星導(dǎo)航系統(tǒng)服務(wù)性能和服務(wù)質(zhì)量。在此基礎(chǔ)上,對GNSS多徑抑制基帶處理算法研究前景進(jìn)行展望:
1)改善算法性能:
①提高多徑抑制算法的性能,提高Double-Delta、MEDLL、ELS等算法的跟蹤精度和計(jì)算效率,合理改進(jìn)算法使其滿足應(yīng)用需求。對于新體制信號,一方面需要加強(qiáng)去模糊算法的研究,使其在達(dá)到無模糊的同時(shí)保留原信號的良好特性,如主峰寬度、信號強(qiáng)度等,從而進(jìn)一步提升多徑抑制性能;另一方面,針對信號結(jié)構(gòu)進(jìn)行新型跟蹤算法的研究,如數(shù)據(jù)/導(dǎo)頻聯(lián)合跟蹤、TM61跟蹤算法等,提高新體制信號的能量利用率,發(fā)揮新體制信號的優(yōu)秀性能。
②改善特殊多徑的抑制性能,一是加強(qiáng)短多徑抑制算法研究,隨著衛(wèi)星應(yīng)用越來越廣泛,特別在復(fù)雜城市環(huán)境中,多徑信號往往是近距離和短時(shí)延的,使得短多徑抑制技術(shù)具有較高的研究價(jià)值;二是加強(qiáng)高階BOC信號多徑抑制算法研究,目前BOC多徑抑制技術(shù)多集中于低階BOC信號,高階BOC信號的研究相對較少,高階BOC信號的帶寬較大,其自相關(guān)函數(shù)的相關(guān)峰窄而且非常密集,有的甚至存在一定的非對稱性,給跟蹤和多徑抑制帶來挑戰(zhàn),如Galileo E1頻點(diǎn)和北斗B3頻點(diǎn)的BOC(12,2.5)等。
2)多源信息融合:結(jié)合衛(wèi)星導(dǎo)航的發(fā)展趨勢,將信息融合技術(shù)應(yīng)用于基帶處理算法解決多徑問題,例如加強(qiáng)矢量跟蹤技術(shù)的研究,矢量跟蹤算法的原理是將各通道的鑒相器誤差及其他輔助信息(如慣導(dǎo))輸入到導(dǎo)航濾波器,再生成環(huán)路控制量調(diào)節(jié)本地NCO,在高動(dòng)態(tài)、遮擋和空曠的環(huán)境下,相較于標(biāo)量跟蹤算法具有更高的跟蹤精度和多徑抑制能力,目前應(yīng)用主要受結(jié)構(gòu)復(fù)雜和計(jì)算量大的限制,可以從濾波算法角度出發(fā)進(jìn)行改善。
3)算法應(yīng)用優(yōu)化:加強(qiáng)新播發(fā)信號多徑抑制算法的應(yīng)用研究,通過改進(jìn)與新播發(fā)信號結(jié)構(gòu)類似的多徑抑制算法,快速地實(shí)現(xiàn)新信號的精確跟蹤,提高算法的適用性,如早期北斗B1C信號的多徑抑制算法的研究可以借鑒GPS的TMBOC信號和Galileo的CBOC信號,加快產(chǎn)品化進(jìn)程。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06