水泥混凝土整平機自動升降液壓系統仿真研究
2022-09-22 01:35:42馬麗英徐建偉楊隧中曹源文董琴琴
機床與液壓 2022年3期
關鍵詞:系統
馬麗英,徐建偉,楊隧中,曹源文,董琴琴
(1.重慶交通大學機電與車輛學院,重慶 400074;2.河南鄭州路橋建設投資集團有限公司,河南鄭州 475000)
0 前言
水泥混凝土整平機用于水泥混凝土路面,以發射器發射的激光為基準平面,通過水泥混凝土整平機自動升降液壓系統實時控制整平達到規定整平標準[1]。自動升降液壓控制技術對于降低人工作業操作誤差、提高平整作業精度和質量非常關鍵[2]。

但尚未發現針對其自動升降系統進行專門的系統模型建立和液壓系統仿真試驗。據此,本文作者對水泥混凝土整平機整平板和激光接收器系統進行模型建立及對液壓控制系統進行仿真試驗和仿真結果的分析,論證了整平機自動升降控制液壓系統的可行性,對水泥混凝土路面平整度優化以及整平機運動動力特性研究提供必要的參考[8]。
1 整平板和激光接收器系統模型建立
1.1 激光接收器與整平板升降驅動參數的設置
通過ADAMS軟件先對激光接收器和整平-振動整平板進行建模,然后根據水泥混凝土整平機作業順序,設置激光接收器上下驅動,待激光接收器到達一定高度停止后,整平板開始實施升降功能[9]。升降驅動的設置分別如圖1、圖2所示。

圖1 激光接收器升降驅動設置

圖2 整平板驅動參數設置
1.2 整平板振動參數設置
由于路面整平通過整平板的周期性振動完成,所以還需對整平板進行振動仿真分析。整平板振動參數設置如圖3所示。

圖3 整平板振動參數設置
1.3 整平板和激光接收器系統模型的仿真試驗
完成整平板與激光接收器升降驅動與整平板的振動參數設置完成后,設定仿真時間與步數,進行仿真[10]。
仿真過后進入后處理模式,查看仿真結果。激光接收器在豎直方向上的位移變化與整平板在豎直方向上的位移變化分別如圖4和圖5所示。

圖4 激光接收器在豎直 圖5 整平板在豎直方方向上的位移圖 向上的位移圖
圖4顯示:仿真設定其初始位置為離地500 mm的高度處,0~1 s內曲線表示當接收水平高度低于初始位置時,激光接收器實現下降,仿真速度約為20 mm/s;1~2 s內曲線表示以離地480 mm為初始位置時,激光接收器實現上升,仿真速度約為30 mm/s。兩種狀態仿真結果表明能夠在1~2 s內達到預定高度。待激光接收器達到預定高度后,能夠保持其高度不變,保證了水泥混凝土整平機整平作業過程中的水平精度。
由圖5可以看出:以整平板最高位置處為基準,設置整平板初始位置在-70 mm,在接收到高度信號后,整平板在1 s內識別輸入信息后開始下降,3 s后達到預定高度,仿真過程中設定下降高度為75 mm,第4 s時整平板達到預定高度,并在到達預定高度后保持當前狀態開始作業。由此表明:仿真模型可實現激光接收器與整平板的自動升降功能。
2 自動升降液壓系統仿真
根據整平板和激光接收器系統能夠實現自動升降功能,針對自動升降液壓控制系統進行了以下仿真。
2.1 激光調平系統工作原理
水泥混凝土整平機是通過刮板將高出的水泥混凝土帶走并初步刮平,達到設計要求的標高。調平是由整平機上的激光測控系統實時控制,根據激光掃描自動調平。激光發射器發出的激光束圍繞著激光軸線方向進行掃描,形成一個掃描平面。激光接收器接收到發射器所發射的激光束后,將信號傳輸至液壓控制閥,自動調整高度與之對準,從而達到找平的目的[11-12]。激光發射接收模塊如圖6所示。

圖6 激光發射接收模塊
整平機機身升降分為4個過程:機身的上升分為支腿著地、機身自動調平、水平上升和位置保持4個過程;下降則分為檢查支腿是否充分著地、自動調平、水平下降和位置保持4個過程[13]。整平機機身自動調平升降系統組成如圖7所示。

圖7 整平機機身自動調平升降系統組成
2.2 激光接收器自動升降控制仿真
激光接收系統定位升降控制主要依靠電磁閥實現。電磁閥通過接收電動機的指令,完成相應的升降功能。當電磁閥接收到正轉指令時,電磁閥左位接入,進出口方式為P—B、A—T,電動機正轉;當電磁閥接收到反轉指令時,電磁閥右位接入,進出口方式為P—A、B—T,電動機反轉[14]。
激光接收器自動升降液壓系統原理如圖8所示。此系統通過角位移傳感器6采集激光信號,將采集的信號與重合水平位置進行比較,得出角度差;然后激光信號轉換為液壓信號后傳至電磁換向閥3,控制電動機的轉速與轉向,從而控制激光接收器實現升降功能;達到發射器提供的高度后,電機1停止運行,完成激光接收器對應高度指令。
在仿真時,仿真時間設置為10 s,設置求解器誤差值為10-7,最大時間步長為30 s。

圖8 激光接收器自動升降液壓系統
根據工作原理在AMESim軟件中對液壓控制系統進行仿真設置,啟動仿真后得到液壓控制閥進出口流量及壓力值,該值表明在仿真過程中,系統運行的穩定性和準確性。得到激光接收器自動升降系統中液壓控制閥仿真計算結果如表1所示。

表1 電液換向閥仿真計算結果
如表1所示:P口流量與A口流量相對應,均為-40.469 L/min,T口流量與B口流量相對應,均為40.469 L/min,流量保持穩定不變,系統運行穩定;在載荷變化時能保持閥內進出口的壓差為定值150×105Pa。由此可以看出:在液壓系統運行過程中,執行元件的運動速度非常穩定。
2.3 整平板-振動升降液壓控制仿真
整平板自動升降液壓系統原理如圖9所示。此系統中液壓泵為系統供能,它以恒定的壓力向系統供油,溢流閥2決定液壓泵的壓力,液壓動力裝置由三位四通電磁閥3和液壓缸5組成。位移傳感器6實時檢測路面位移,通過恒定信號源將信號傳輸至電磁閥3,將機械信號轉換為液壓信號輸出;PID伺服控制系統對整個控制系統進行偏差調節,使被控液壓推桿位移與實際輸入位移指令一致[15]。液壓缸5作為執行裝置,通過通壓力油和回油控制整平板的升降。
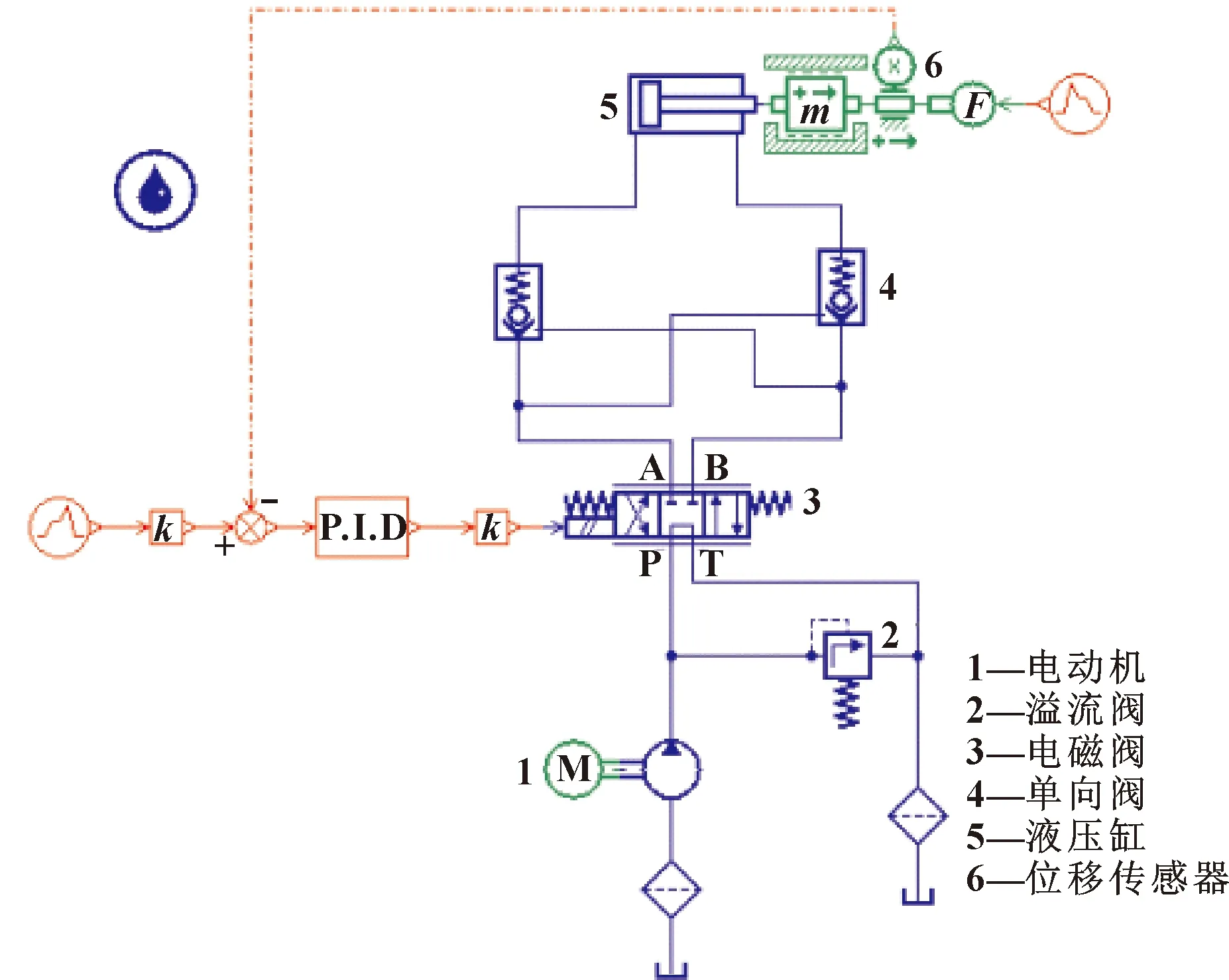
圖9 整平板升降液壓系統原理圖
仿真時間設置及求解器設置同上,得到整平板自動升降液壓系統中液壓控制閥仿真計算結果如表2所示。

表2 液壓控制閥仿真計算結果
如表2所示:液壓控制閥右位接通,P口與A口壓力差值和T口與B口壓力差值接近,液壓桿推動整平板下降,保證整平板降落過程中的穩定性。
3 液壓控制系統仿真試驗對比
3.1 激光接收器自動升降仿真試驗對比
對于激光接收器的自動升降液壓系統設計,設置角位移傳感器所接收到的角度分別為1 000°、1 500°和2 000°。角位移傳感器輸入值如圖10所示,電磁閥工作后得到馬達輸出角度如圖11所示。

圖10 角位移傳感器輸入數據 圖11 馬達輸出角度
可知,角位移傳感器在t=3 s輸入數據,并將角度位置信息輸入至電磁閥中,在AMESim工作環境中啟動液壓仿真后,電動機從第3 s開始進行角度的對準,大概在第6 s時轉動1 000°,在第8 s時轉動1 500°,大概在第10 s時轉動2 000°,有效地實現了激光接收器與發射器的對準。
從仿真結果可以看出:當位移傳感器接收到角度信號之后,通過該液壓系統,電動機轉動角度與輸入值完全相等,即激光接收器能夠自動與激光發射器對準并達到同一水平,電動機會根據輸入角度轉動相應角度,從而使得激光接收裝置實現與激光平面的對應,完成其自動升降。
3.2 整平板自動升降仿真試驗對比
對于整平板的自動升降液壓系統設計,設置位移傳感器輸入位移分別為0.1、0.2、0.3 m,位移傳感器輸入位移如圖12所示,液壓缸輸出位移如圖13所示。
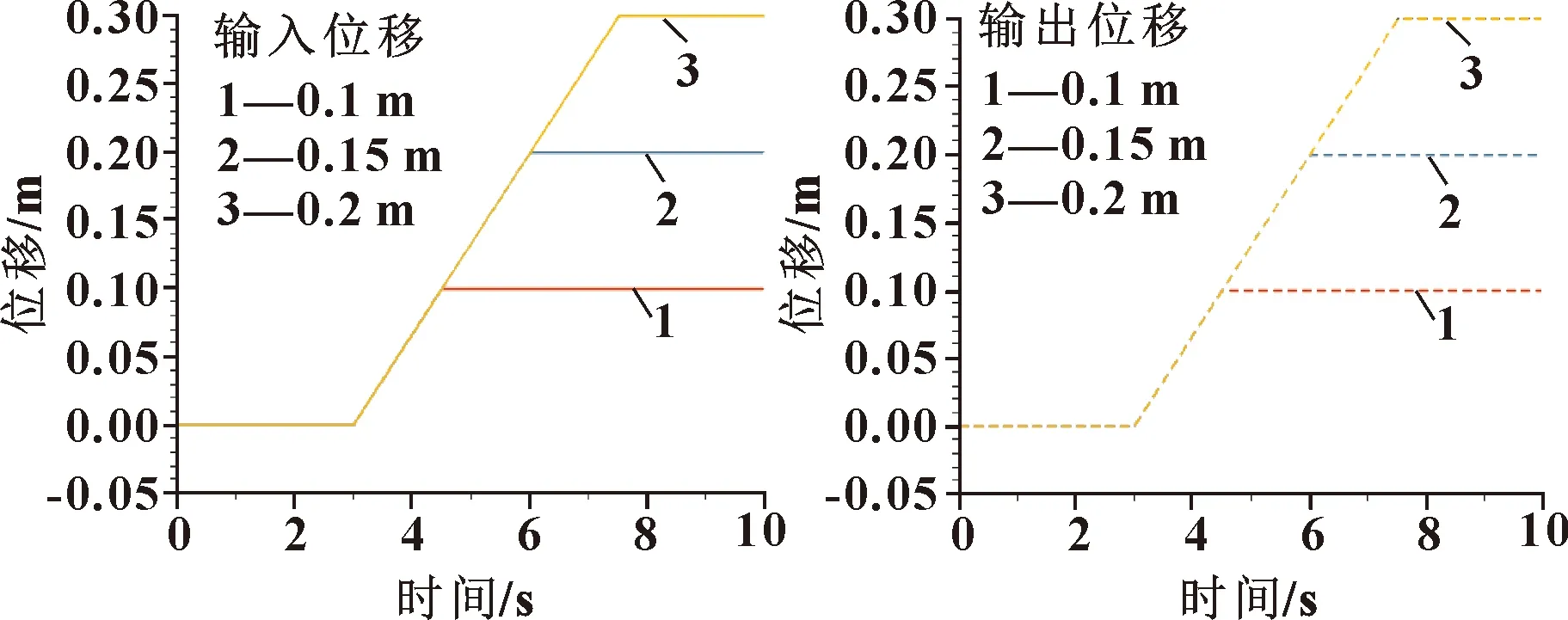
圖12 位移傳感器輸入數據 圖13 液壓缸輸出位移
對比位移傳感器輸入位移以及液壓缸輸出位移曲線可知:設定整平板分別需要移動0.1、0.2、0.3 m,如圖12所示,位移傳感器t=3 s輸入數據,并將高度位置信息輸入至電磁閥中。圖13顯示:液壓缸推桿從第3 s開始進行運動來完成整平板的升降,在4~5 s內到達0.1 m處位置,在第6 s時到達0.2 m處位置,在第7~8 s時到達0.3 m處位置。通過兩條曲線的一一對應可以看出:位移傳感器輸入位移值與液壓缸輸出位移值一致,說明液壓缸能夠準確到達位移傳感器所輸入的位移位置處,表明該液壓系統能夠使得整平板實現其自動升降功能。
4 結論
通過ADAMS軟件建立激光整平機整平板和激光接收器系統模型,然后通過AMESim軟件進行了整平板激光接收裝置和整平板自動升降液壓控制系統仿真試驗,得出以下結論:
(1)通過ADAMS軟件對激光整平機整平板和激光接收器系統模型的建立及驗證,得出仿真模型可以很好地實現激光接收器與整平板的自動升降功能。
(2)利用角位移傳感器輸入、數據轉換和電磁換向閥方向的控制,分別實現了激光接收裝置的自動升降功能和電磁閥控制液壓缸推桿的運動方向,實現了整平板的自動升降功能。
(3)根據輸入輸出數據進行仿真對比分析后得出:電動機根據輸入角度自動轉動相應角度,完成激光接收裝置和激光發射器自動升降;同時整平板升降高度能夠一一對應移傳感器輸入數據,最后通過液壓升降系統準確完成自動升降功能。
(4)通過自動升降系統動力學模型的建立和液壓控制系統的仿真分析,論證了該系統的可行性,為進一步提高平整作業的精度和質量、開展運動特性和動力特性研究提供了參考。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
