基于STM32 的智能搬運機器人設計
2022-09-22 11:56:00林俊仁郭駿祥王一凡張博鑫倪虹霞
中國管理信息化 2022年13期
林俊仁,郭駿祥,王一凡,張博鑫,倪虹霞
(長春工程學院,長春 130012)
0 引 言
近年來,制造企業不斷完善生產系統,智能制造與智慧物流行業快速發展,智能倉儲由于其便于管理、效率高等特點得到廣泛應用。過去傳統人力進行搬運、運輸等重復工作,費時費力,應用ROS 智能車和AGV 智能車在物流運輸領域成為必然趨勢。智能搬運機器人是智能倉儲的重要組成之一。本文設計的智能搬運機器人是一款基于STM32 和樹莓派的室內自主行走、自動避障的自動導引小車(Automated Guided Vehicle,AGV),可以自主進行路徑規劃,識別物料,獨立完成搬運工作。
STM32 單片機用于控制車的行進、速度及轉向等基本功能,如前進、后退、拐彎等。設計一個二輪平衡車和四輪智能車結構,兩種機械結構更加適用于多種環境,電機PID 速度控制,了解并使用電機編碼器,完成航向角的測量,可以對智能車精確控制。而樹莓派主要用于發布導航信息和里程信息,利用SLAM 算法對智能車精準定位,以達到導航的目的。
1 智能搬運機器人室內導航技術
智能搬運機器人的核心技術是自主導航技術,其包括環境感知、定位及路徑規劃等3 個部分。室內環境感知,由激光雷達傳感器實現,通過激光雷達傳感器測出機器人與目標之間的距離,運用算法計算目標地點的位置。
智能搬運機器人室內定位由二維碼導航技術實現,通過差分定位,結合現場地圖,利用控制系統分析地圖坐標數據,并與已建立的地圖信息對比實現定位。該技術定位準確、靈活,易于鋪設和更換路徑,易于控制通信,是現場應用比較廣泛的方式。
2 總體設計
2.1 硬件設計
智能搬運機器人由多個模塊組合構成,其硬件包括了智能車車架、樹莓派4b、舵機、STM32 f103c8t6開發板、雙路直流減速電機、激光雷達、編碼器、電池、電機驅動、MPU6050、LED 屏幕,系統硬件組成結構圖如圖1 所示。
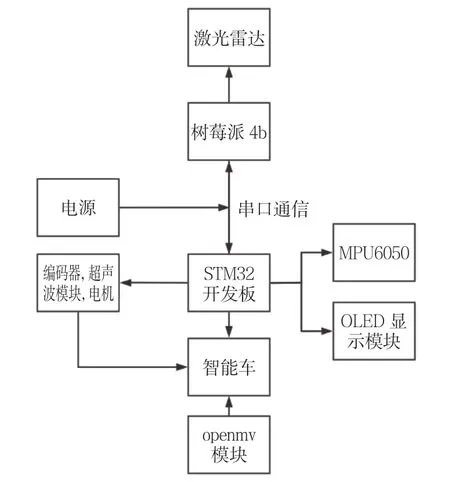
圖1 系統硬件組成結構
硬件系統主要組成部分:
(1)采用STM32 單片機作為主控芯片,其內部資源豐富,片上外設、定時器等數量較多,功能強大,有專用的PWM 引腳,更加穩定。該單片機具有I2C,SPI 等接口,利于開發和控制,DMA 控制器用于數據的運輸,減少對CPU 的占用。
(2)智能車機械結構分為兩種:兩輪和四輪。兩輪為平衡車結構,體積小,更利于進入狹小的環境;四輪更加穩定,利于進入地面不平的環境,穩定性和平衡性更好。
(3)電源:本設計采用航模電池,電池組規格為,電壓:11.1V 到12.6V,1100mAh,8C。其尺寸:69mm×34mm×19mm,重量約90g。滿足電機驅動模塊和樹莓派供電要求,電機驅動模塊給STM32 單片機提供5V 的直流電源供電。
(4)測速編碼器:編碼器是一種將角位移或者角速度轉換成一連串電數字脈沖的旋轉式傳感器,我們可以通過編碼器測量到位移或者速度信息。編碼器從輸出數據類型上可以分為增量式編碼器和絕對式編碼器。從編碼器檢測原理上來分,還可以分為光學式、磁式、感應式、電容式。常見的是光電編碼器(光學式)和霍爾編碼器(磁式)。設計采用的是霍爾編碼器,滿足智能搬運車測速編碼需求。
(5)超聲波傳感器:采用HC-SR04 超聲波測距模塊,有UART 和IIC 功能,2cm 盲區,采用升級解調芯片RCWL-9205,2.2mA 工作電流,工作電壓3~ 5.5V,接口豐富。
(6)舵機:采用該SG90,反應速度0.12~ 0.13 秒/60°,工作扭矩為0.156 8Nm,可使用溫度為-30℃到60℃,使用電壓為5V,可用于舉升等功能。
(7)屏幕采用OLED 屏,由STM32 控制驅動,優點有可視角度大,功耗低,不需要背光源,對比度高等優點,供電范圍:3.3~ 5V,工作溫度:-30℃~70℃,通信方式采用I2C 或者SPI,使用壽命不少于160 000 小時。
(8)樹莓派4b 采用Ubuntu 系統,CPU 為64 位1.5GHz 四核(28nn 工藝),藍牙5.0,內存為1~ 4GB DDR4,擁有雙micro HDMI 接口,千兆以太網,電力需求為3A,5V。
(9)激光雷達采用了RPLIDAR A1,精度較高,可用于定位導航,采樣頻率可達8k,掃描頻率達到5.5Hz,掃描范圍為360°,功耗較低,可以實現多點觸控與人機交互,抗環境光能力強。
2.2 軟件模塊組成部分
本系統主要功能有導航定位,二維碼識別,避障等功能。軟件設計模塊主要分為兩個部分,一個是樹莓派部分,包括激光雷達導航,SLAM 算法,模型文件編寫等模塊,一個是STM32 智能車部分,有PID 速度控制,航向角度控制,二維碼識別等軟件模塊。軟件模塊組成框圖如圖2 所示。
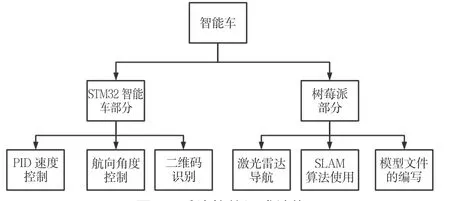
圖2 系統軟件組成結構
2.2.1 PID 部分
二輪結構下:平衡智能車運用了PID 進行直立、平衡和速度控制,分為直立環、速度環、轉向環,每一個PID 出的輸出結果都由單片機輸出成PWM 進入電機。直立環PID 只運用了PD 控制,輸入的參數為角度偏差和機械中值(取決于平衡車的機械結構),角度由MPU6050(陀螺儀)測量;速度環運用了PI 控制,輸入的參數為智能車輪子的轉速,也就是智能車電機編碼器的速度,同時使用了一階低通濾波器,使速度控制更精準;轉向環用了PD 控制,輸入參數為智能車的轉向角度。PID 的基本流程如圖3 所示。
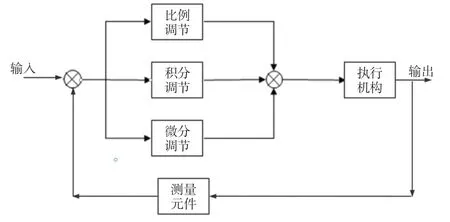
圖3 PID 的基本流程
四輪結構下,前輪使用舵機轉向,整個四輪車采用了四驅驅動,通過PID 控制其速度,輸入的參數為智能車的輸入電機編碼器的轉速,輸出結果為PWM值。
2.2.2 舵機控制
使用不同的PWM 波實現舵機的各個角度轉動,控制脈沖的長短來控制舵機的最大轉動角度。本系統下,舵機的基準信號周期為20ms,寬度為1.5ms,而最小脈沖為1ms,最大脈沖為2ms 實現搬運,具有卸下物品等功能。
2.2.3 激光雷達部分
使用思嵐科技的RPLIDAR A1,用5V 直流電源供電,有以下兩種使用方法。
直接通過STM32 與激光雷達相連接,使用STM32F401RE_Nucleo 開發板(STM32F401RE_Nucleo開發板背面的SB62、SB63 各自連通后開發板正面CN9上面的D0、D1才能和UART2 的Rx、Tx 連通),RPLidar 通過UART1 引腳與STM32F401 相連并通訊,波特率為115 200,通過程序讀取激光雷達的輸出。
程序1 的基本思路如下:定義一個UART1 Rx的DMA 緩沖區用于存儲數據,取變量名為uart1_rx_buffer,將以定義成一個環形隊列,所占用的連續內存空間從邏輯上可分為UART1_RX_BUFFER_AMOUNT(程序中的一個變量)份,這個變量中的每一個元素的data 指針都指向uart1_rx_DMA_buffer的n 份的首地址。UART 接收過程中,將數據傳給DMA,并完成數據入列,并在中斷函數中實現入隊操作,調整隊列。定義一個UART1_RX_BUFFER 結構體,其中state 用于表示DMA 緩存區的狀態,start_DMA_time_ms 和finish_DMA_ms 用于表示DMA 的開始接收和完成接收的時間。ValidPos 用于表示保存了多少數據,readPos用于將要存儲的數據的下標,data中存儲著緩存區里的數據,可以通過printf 函數打印出來。圖4 為思嵐官網RPLIDAR A1 的打印數據,引腳配置如圖5 所示。
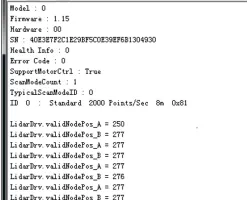
圖4 打印數據程序(部分截圖)
圖5 芯片引腳配置
將RPLIDAR A1 連接樹莓派,使用思嵐科技官網的SDK 包,得到需要的位置信息用于導航,在SDK包中ultra_simple 是一個簡單的演示程序,可以快速地集成到現有的系統,但并不穩定,使用simple_grabber 是輸出柱狀圖的雷達數據,用戶需要使用connect()函數打開串口并連接到激光雷達上。采用了Cartographer 算法(由google 推出的一套基于圖優化的SLAM 算法),相較于Hector 算法能更加精準地判斷位置,具有回環檢測功能,Cartographer 是一個在多個平臺和傳感器配置上提供2D 和3D 實時同步定位和繪圖(SLAM)的系統,本方案采用的是2D SLAM,主要融合了Local 和Global 兩種方式,使用了Submap 這一概念。使用Cartographer 算法時,需先安裝ROS 和cartographer_ros 的依賴項,或則會報錯,還需配置自己的設備信息,構建.launch 文件,最終實現點云的第一人稱可視化。
2.2.4 顯示部分
本設計采用的顯示屏幕是OLED 屏幕,由I2C 或者SPI 控制,可以用來顯示中文,英文,標點符號。如圖5 所示,一共有四個引腳。VCC 接單片機的3.3V引腳,GND 接電源負極,也可以并聯上一個濾波電容,保證供電穩點,不會出現閃屏的現象,SCL 和SDA 分別為OLED 屏時鐘線和數據線連接單片機的I2C 引腳。
2.2.5 二維碼識別
使用openmv 實現二維碼識別,可以讀取不同的二維碼信息,獲得智能車的基本位置。
3 實驗結果與分析
智能搬運機器人系統測試內容是對研究完成的系統的主要功能進行測試,檢驗系統功能的完成程度是否滿足設計要求。在測試過程中,對系統中不滿足設計要求的部分進行優化和完善。本系統的智能車主要由PID 速度控制,MPU6050 姿態控制,二維碼識別,激光雷達導航,發布里程計和深度信息,機器人模型文件等多部分代碼文件組成,使用Keil uVision5、VIM 等多個編程軟件以及調試軟件,使用STLINK 下載器將調試好的軟件下載到單片機和樹莓派中,最終完成智能物流搬運車的設計。測試內容及結果如表1 所示。
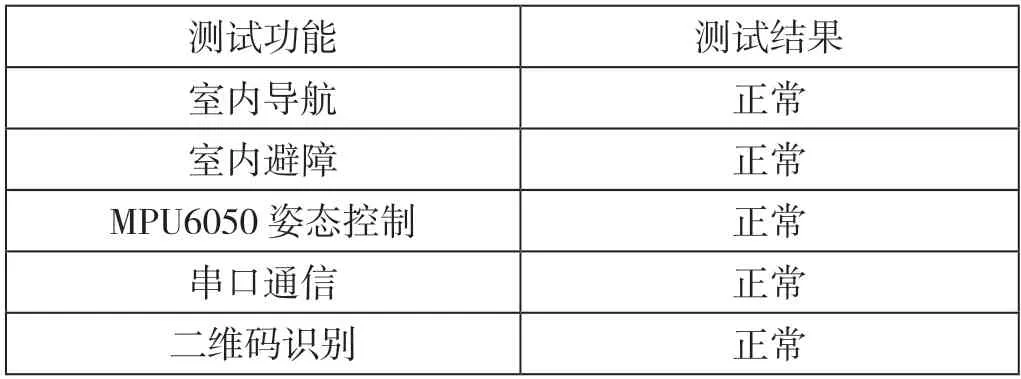
表1 測試內容及結果
4 結 語
文章設計一款實現智能搬運功能的機器人,實現了智能定位、導航、避障及物資搬運等功能,實現了搬運智能化的設計要求,解決了傳統物流行業依賴人工、效率低等問題。該智能搬運機器人適應性強,只需對其程序進行簡單修改就可以適應多個不同環境需求,為智能制造領域物流運輸提供有力支撐。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
表面工程與再制造(2019年6期)2019-08-24 06:40:04
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
電子制作(2018年12期)2018-08-01 00:48:04
