新型三平移2PPPa并聯機構運動學分析與優化設計
2022-09-22 01:23:10彭紅梅陳亞陸彩滿劉艷梨吳洪濤
機床與液壓 2022年3期
彭紅梅, 陳亞,陸彩滿,劉艷梨,吳洪濤
(1.江蘇安全技術職業學院機械工程系,江蘇徐州 221011;2.南京航空航天大學機電學院,江蘇南京 210016)
0 前言
少自由度并聯機構因具有結構簡單、制造成本低、控制容易、實用性強的特點,一直是并聯機器人領域的研究熱點。與六自由度并聯機器人機構相比,少自由度并聯機構具有更高的實際工程應用價值。應用最廣泛的空間三維純移動并聯機構是Delta機器人。Delta機器人成功應用于并聯機床、工業分揀、3D打印等眾多領域。
國內外學者針對三維純移動并聯機構研究內容主要包括運動學分析、動力學分析、控制設計、構型綜合、尺度綜合、性能分析等。文獻[5]中對一種T形軸鉸鏈Delta三平動并聯機構進行系統研究,根據最小支路位移參數特性綜合出一批三維純移動的并聯機構,優選出一種新型T形軸鉸鏈的Delta并聯機器人機構,同時建立機構運動學模型和速度模型。文獻[6]中提出基于靈巧性的一種新型3-PUU并聯機器人,根據運動學方程計算得到機構運動學逆解與機構速度雅克比矩陣,基于運動靈巧性進行尺度綜合分析,優化后得到的設計參數為構型設計提供理論參考依據。文獻[7]中提出一種三平動非對稱冗余驅動(3-S2PS )并聯機床機構,建立運動學方程;基于此,利用邊界數值搜索法分析工作空間,利用曲線擬合的方法確定桿長和動平臺的位置姿態關系。文獻[8]中設計三維純移動的并聯機器人機構,根據單開鏈驗證其運動特性,計算其位置分析的正、逆解析解,同時分析機構的輸入輸出運動解耦性。文獻[9]中基于機器人機構結構綜合理論設計三自由度正交并聯機器人機構,并建立運動學方程模型得到運動正解、逆解解析式。文獻[10]中為解決并聯機構耦合所帶來的控制困難,設計一種新型具有三維移動解耦、運動副簡單且完全各向同性的三維移動并聯機構,支鏈呈正交對稱分布,通過螺旋理論驗證機構的運動性質和自由度,推導出運動學方程正逆解解析式,最后分析機構的工作空間、靈巧度等操作性能。文獻[11]中提出一種新型的2RRPaR+PPaP三維純移動并聯機構,基于運動特性和結構設計完成位置運動學分析,同時兼顧工作空間和全局靈巧度的優化目標,選擇差分進化算法搜索得到最優化參數,通過算例分析驗證優化算法的可靠性。
以拓撲結構綜合理論作為理論依據,設計一種結構簡單、構型對稱、運動解耦的空間三平移并聯機器人機構,利用結構布置特點建立運動學方程模型,推導得到運動學正逆解解析式,采用數值搜索法三維可視化分析操作空間性能;同時在研究機構奇異性的基礎上,研究工作空間內的全局靈巧度,并繪制靈巧度性能圖譜;根據實際設計需求,選擇螢火蟲算法實現機構的結構參數優化設計,并根據優化后的最優參數值進行算例分析,驗證算法的有效性。
1 并聯機構結構分析
1.1 機構設計
對稱2PPPa并聯機構結構簡圖和三維模型分別如圖 1、圖2 所示,機構由兩條完全相同且對稱分布的支鏈構成,支鏈結構1⊥2⊥(=1,2), 其中表示移動副,表示平行四邊形機構,且要求1與2移動方向互相垂直。移動副1與2為機構的主動副,因此,機構存在4個主動副,設定主動副的位移表示為(,,,),靜平臺的內切圓半徑用表示,動平臺內切圓半徑半徑用表示,平行四邊形的長邊桿長用表示,短邊長用表示,另外平行四邊形的長邊桿和短邊桿構成的夾角為。
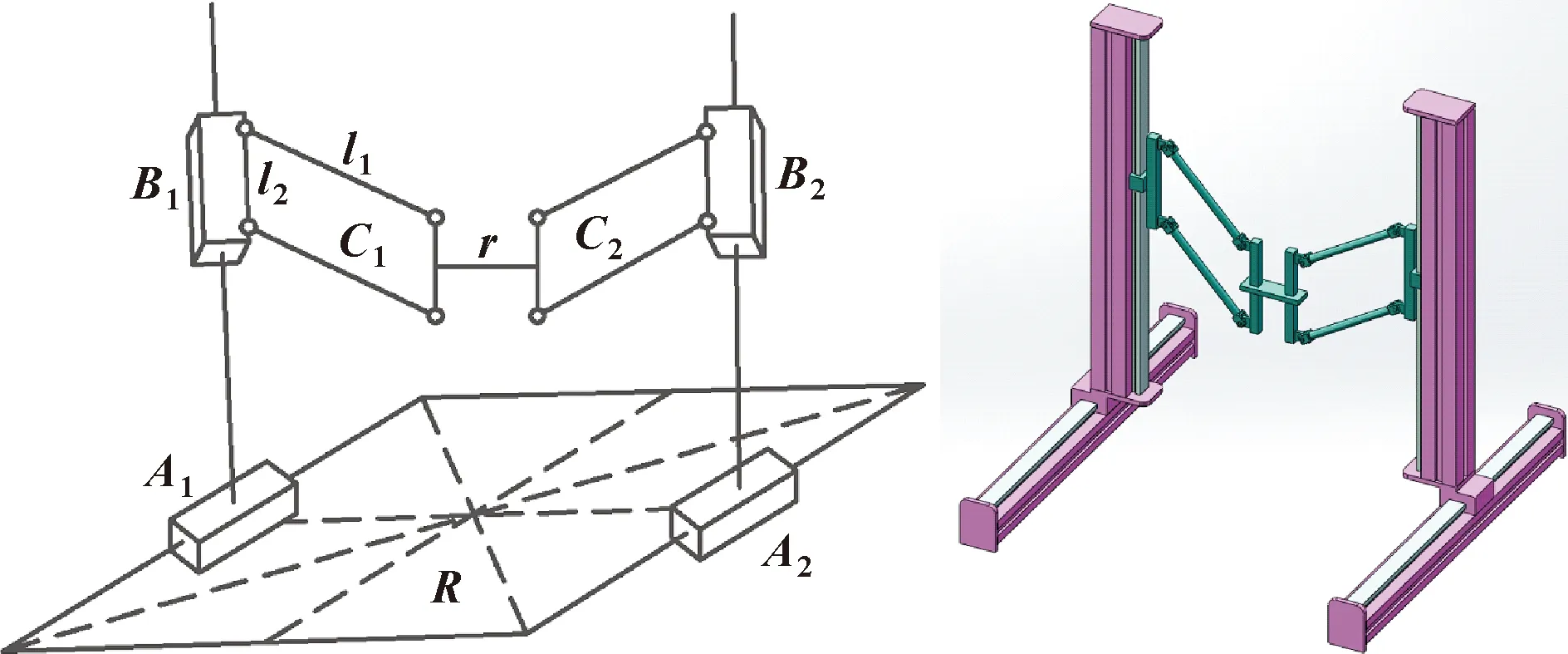
圖1 機構的結構簡圖 圖2 機構的三維模型
1.2 機構的拓撲特性分析
對稱2PPPa并聯機構支鏈拓撲結構為1⊥2⊥(=1,2),利用方位特征方程分析理論計算每條支鏈方位特征集b:
(1)
(1)支鏈1、2構成獨立運動回路,構成的位移方程數

(2)
(2)并聯機構的POC集

(3)
(3)計算機構的自由度:

(4)
(4)支鏈的約束度分析,獨立回路的獨立位移方程數為3,根據機構結構設計,主動副和任何時候都必須相同,因此主動副數目為3,因此,SOC的約束度

(5)
計算得到2PPPa并聯機構耦合度:
(6)
根據拓撲結構分析可得:機構的自由度為3且能實現空間純移動,機構的耦合度為0,機構運動具有完全解耦合性,機構的運動學正解分析相對簡單,且存在表達式,因此,機構的控制設計、動力學分析相對較簡單。
2 位置分析
2.1 位置正解分析
已知機構主動副(,,,),計算得到機構的位置輸出 (,,)。根據動平臺的位置輸出(,,),根據平移轉換原理,得到坐標(-,,)、(+,,)。已知的坐標為(-,,0)、(,,0)。同理得到的坐標(-,,)、(,,)。根據平行四邊形的桿長及其夾角,得到坐標[-+sin(),,-cos()]、[-sin(),,-cos()]。根據的兩種不同的坐標表達式聯立方程,得到如下等式:
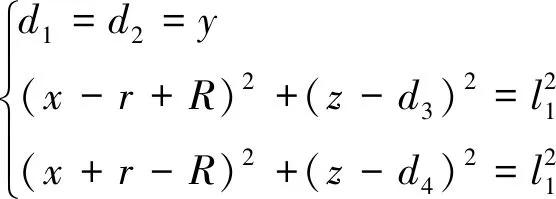
(7)
整合上述等式,推導得到機構的正解表達式:
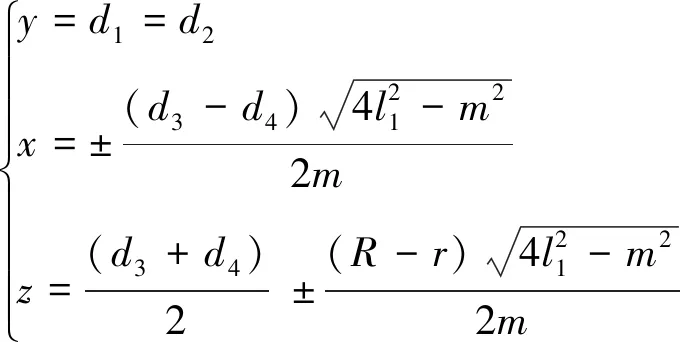
(8)

2.2 位置逆解分析
機構的逆解計算利用等式(7)進行推導,推導公式如下:
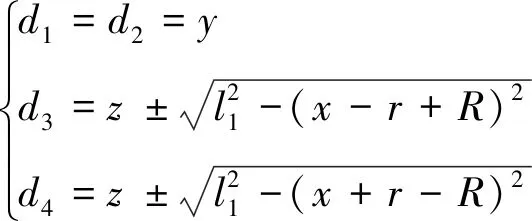
(9)
3 奇異分析
3.1 機構雅克比矩陣

(10)
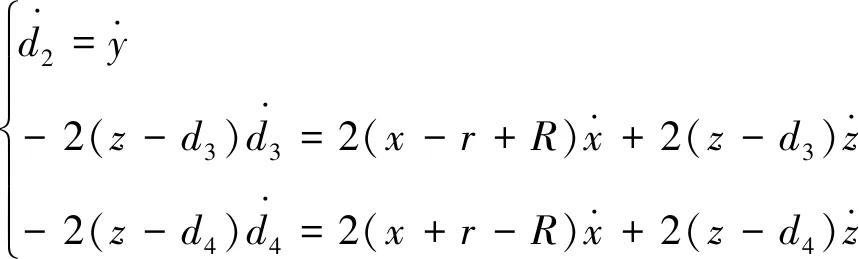
(11)
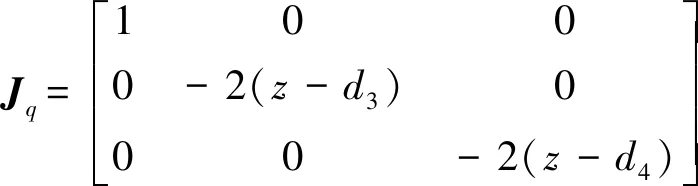
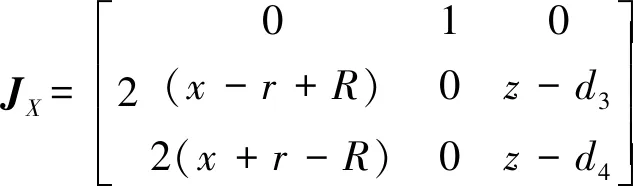
其中:為逆雅克比矩陣;為正雅克比矩陣。
若非奇異,則
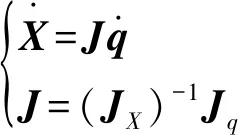
(12)
若非奇異,則
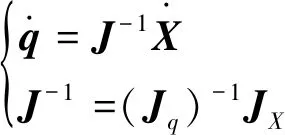
(13)
3.2 逆解奇異性分析
機構逆解奇異條件為
(14)
令det()=0,即=或=,因此,存在以下兩種情況:情況一,支鏈1的平行四邊形長邊桿與靜平臺平行,此情況如圖3(a)所示;情況二,支鏈2的平行四邊形長邊桿與靜平臺平行,此情況如圖3(b)所示。運動過程中應避免運動到極限位置,即工作空間邊界位置。
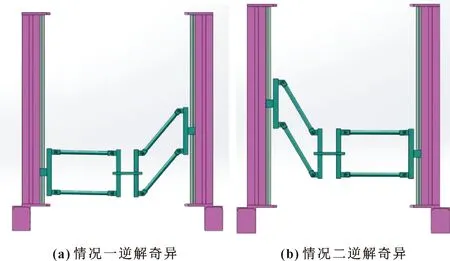
圖3 機構逆解奇異
3.3 正解奇異性分析
(15)
正解奇異滿足條件如等式(15)所示,det()=(-)(-)=0,令det()=0的條件是=或{=0,+=2}。情況一:=,支鏈1驅動副()位移和支鏈2驅動副()移動位移相同,如圖4(a)所示。情況二: {=0,+=2},此情況下支鏈1位移和支鏈2驅動副移動位移關于動平臺對稱,如圖4(b)所示。
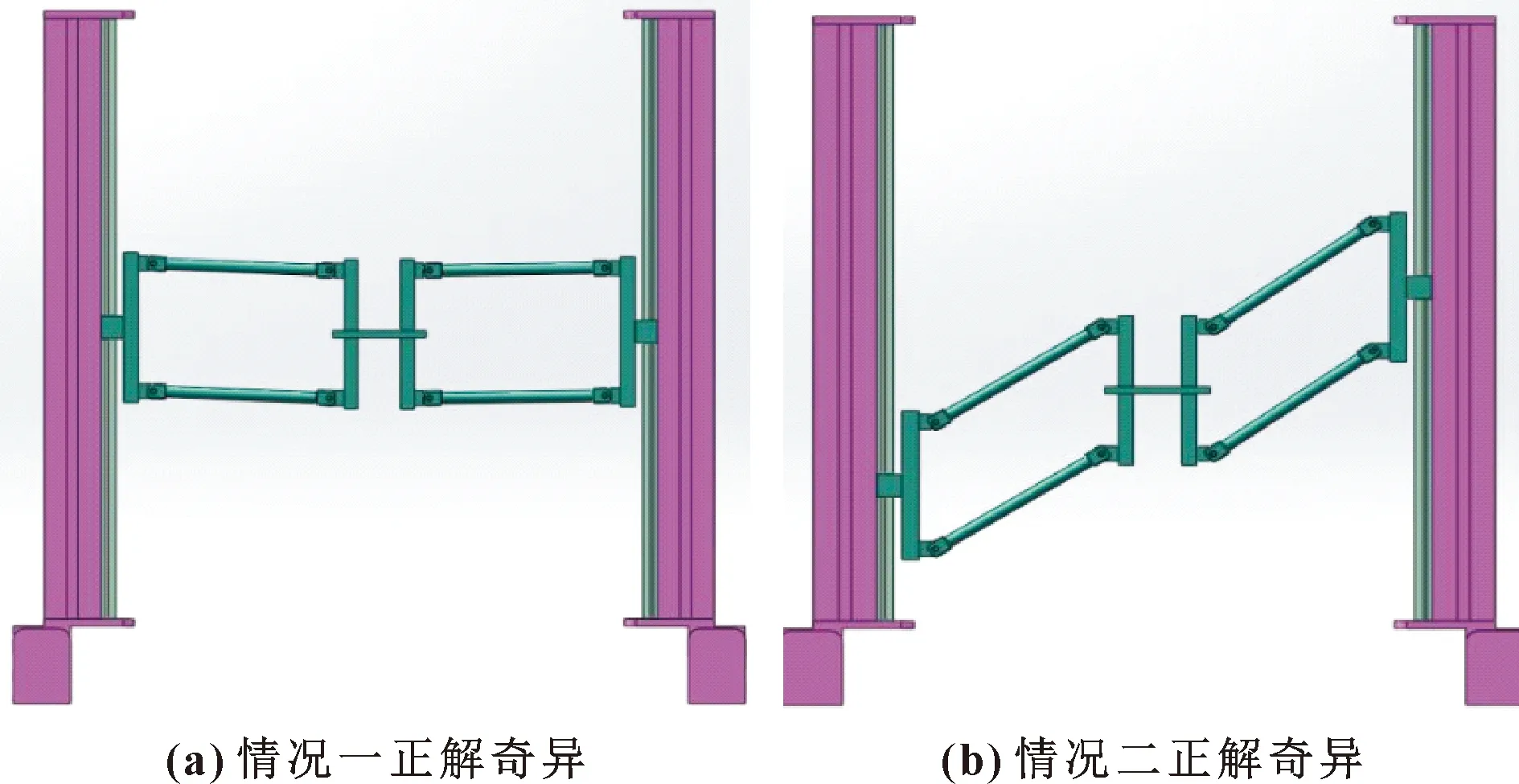
圖4 機構正解奇異
4 工作空間分析
4.1 工作空間約束條件
工作空間作為衡量并聯機構操作性能優劣的重要性能指標,一般在利用機構運動學逆解分析的基礎上采用數值法可視化分析形狀和大小。機構的工作空間約束條件如下所示:
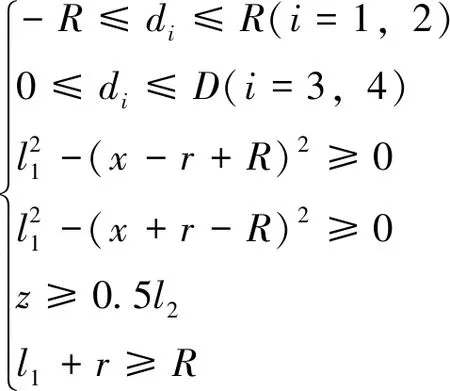
(16)
4.2 工作空間可視化分析
在上一節逆解分析基礎上,選擇極限搜索法對機構的工作空間進行可視化分析形狀和大小。選擇一組參數值,靜平臺半徑=1.2 m,動平臺半徑=0.5 m,平行四邊形的長邊桿長=1 m,短邊長=0.3 m,驅動副移動距離=1.2 m、垂直驅動距離=0.8 m。
由圖5分析可得:機構工作空間形狀均勻對稱分布,且無空洞情況,沿著和的投影均為長方形,而沿著投影面類似于“三角形”,工作空間較大。
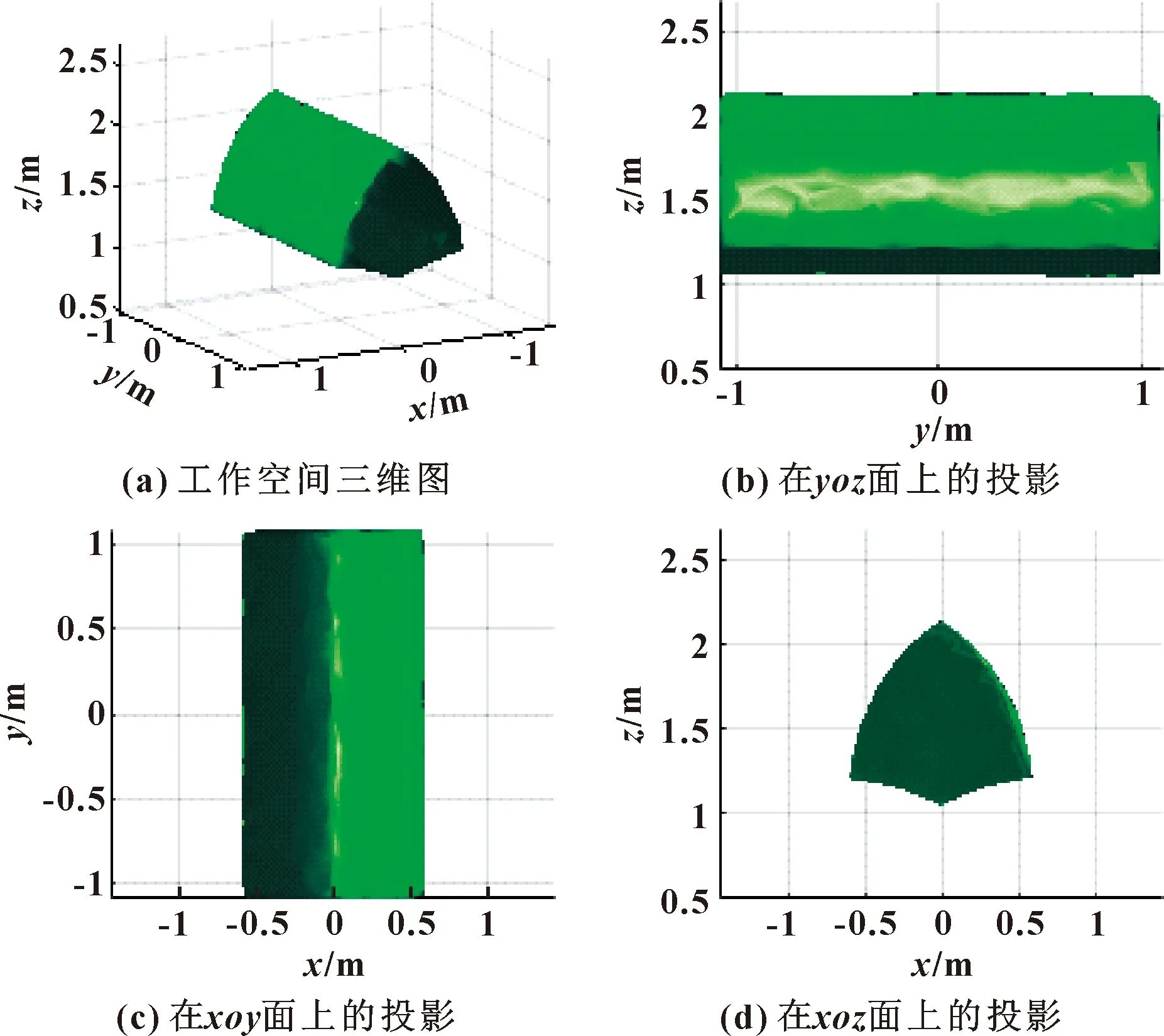
圖5 2PPPa機構工作空間三維圖
5 并聯機構運動靈巧性分析
靈巧度是評價機構運動性能優劣的性能指標。采用極值法分析工作空間內不同位置下的運動靈巧度,通過圖形可視化分析不同位置點的運動性能。圖6為機構的靈巧度分布,圖7是不同高度下工作空間內的靈巧度。
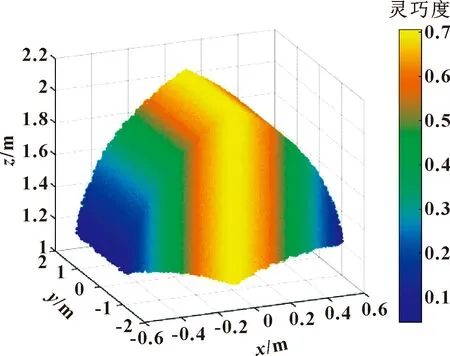
圖6 可達工作空間的運動靈巧度分布
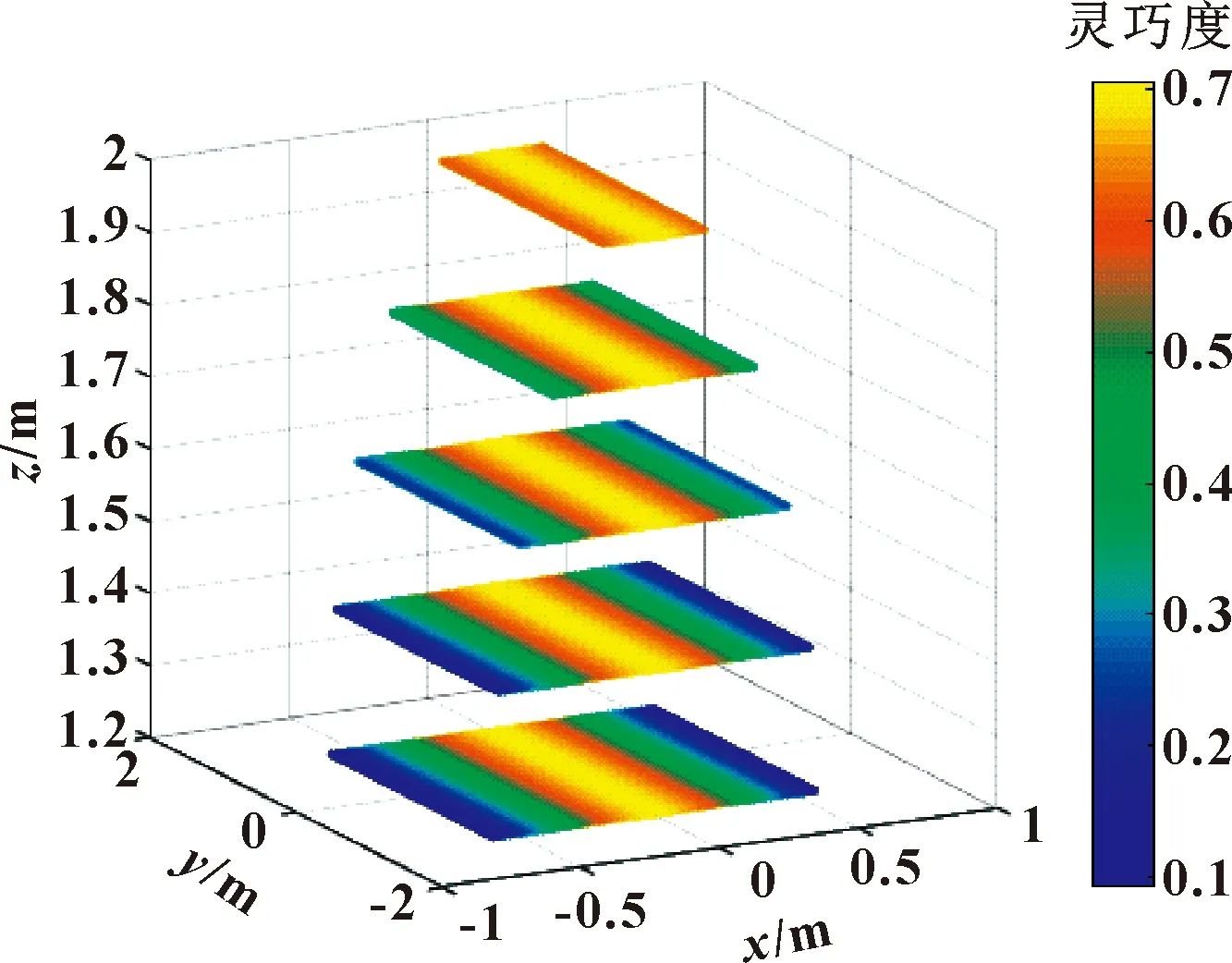
圖7 不同高度下運動靈巧度分布
由圖6、圖7分析發現:機構靈巧度整體較大,工作空間中間區域最大可達0.7,工作空間邊界區域的靈巧度較低;而且,隨著的增加,運動靈巧度較高區域占整個截面面積比例增加。
6 并聯機構優化
6.1 模型優化的建立和算法選擇
在機構設計中,通常希望在滿足約束條件前提下具有較大的工作空間。合理設置尺寸參數有利于提高機構的工作空間,因此,以工作空間體積作為目標函數, 建立數學優化模型Max{(,,,,)}如下:
(17)

針對上述非線性約束的數學優化模型問題,選擇螢火蟲算法進行參數優化。該算法根據模擬螢火蟲的生活習性中閃光機制吸引、移動、合作行為來解決最優問題。螢火蟲算法屬于以自然為靈感的啟發式優化算法。該算法是繼遺產算法、粒子群等算法之后的新興智能優化算法。優化過程中選擇螢火蟲數量=50、步長因子=02、吸收因子=1、最大迭代次數=50。
6.2 優化算例
根據上一節建立的數學優化模型和算法,采用MATLAB軟件進行編程,根據螢火蟲算法計算得到最佳目標函數值隨進化代數變化曲線以及設計變量隨迭代次數的變化。
由圖8、圖9分析可得:優化目標最大值為2.035 m,最優化對應的尺寸參數、、、、分別是0.9、0.8、1.2、1、1 m。優化所得體積較第4節中算例的工作空間體積增加了12%。基于此參數優化后的工作空間三維圖如圖10所示。
圖8 最佳目標函數值隨進化代數變化曲線 圖9 設計變量隨迭代次數的變化
分析圖10可得:優化后的工作空間呈對稱分布,且結構緊湊、邊界光滑、無空洞,具有較好的工作能力,且優化后的工作空間顯著改善,優化后機構操作性能提高12%。因此,也驗證優化模型的可靠性以及算法的有效性。
圖10 優化后的工作空間
7 結論
(1)提出一種較大工作空間的三維純移動的2PPPa并聯機構,機構構型簡單,結構對稱分布,可用于工業包裝、分揀操作領域,具有較好的應用前景。
(2)根據方位特征方程分析2PPPa機構的拓撲結構特性,驗證機構的運動特性和自由度數目。計算得到機構的自由度為3且能具有三維純移動的運動特性。耦合度分析表明機構運動學較為簡單且正解具有解析式。
(3)通過機構的結構特性建立機構的運動學方程,分別得到位置正解、逆解表達式,同時分析工作空間、奇異性、靈巧度等性能指標,分析結果表明:機構具有較大且連續的操作空間、運動靈巧度。
(4)基于螢火蟲算法完成以最大化工作空間為目標的參數優化,結果表明:優化后機構操作性能提高12%,優化后對應的參數、、、、值分別為0.9、0.8、1.2、1、1 m。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
現代企業(2015年2期)2015-02-28 18:45:09
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
