機械手臂正運動學及其末端機械手工作空間研究
2022-09-22 01:23:06劉洪波耿德旭武廣斌孫國棟梁正
機床與液壓 2022年3期
劉洪波,耿德旭,武廣斌,孫國棟,梁正
(北華大學機械工程學院,吉林吉林 132021)
0 前言
串聯機械手臂具有操作工間大、靈活度高、適應性強等優勢,在排險、軍事、農業、養老助殘、醫療防疫等領域應用廣泛。機械手臂主要是協助機器人完成抓取、搬運等作業任務,其靈活程度將直接影響整個機械人最終的動態性能。工作空間即機械手臂末端執行器可達空間位置點的集合,可用來衡量機械手臂的靈活程度。因此,國內外學者采用不同求解方法對其工作空間等相關問題進行了大量研究。黨浩明等通過定義中間變量,解決了矩陣連乘過程中存在重復乘積的問題,縮短了算法運行時間,通過對機械手臂正逆運動學模型求解,驗證了算法的有效性。 孫野等人通過ADAMS與MATLAB聯合仿真,研究機械手臂工作空間問題,但仿真時未考慮末端執行器尺寸對工作空間的影響。于瑞以多臂型鑄件清理機器人為研究對象,對其工作空間進行了分析,并采用極值法提取了工作區域的邊界曲線,但未對所建立的運動學模型準確性進行分析論證。
為減少剛性手爪對被抓取物體的傷害,本文作者將上海某公司生產的機械手臂末端手爪替換為自主研制的柔性機械手。根據機械手臂構型特點,基于改進后的D-H建立了機械手臂的運動學模型,通過對比計算與仿真結果驗證了所建模型的準確性;采用蒙特卡洛法繪制出末端機械手可達空間點云圖,并在此基礎上分析得到了機械手臂各結構參數對末端機械手工作空間體積的影響規律。
1 機械手臂本構模型
本文作者研究的機械手臂由五自由度串聯機械臂和自主研發的氣動四指柔性機械手串聯而成(圖1)。五個關節依次為:肩旋轉關節、肩擺動關節、肘關節和腕部兩關節(俯仰、旋轉)。末端執行器采用剛柔一體化的氣動柔性四指機械手,該機械手可穩定抓取物體最大質量為1.38 kg,能夠適應直徑小于160 mm的柱體、球體、三角形和不規則物體,且抓取力可控,適用于易碎易損物體的抓取和搬運。其中,腕部兩個關節對末端機械手的空間姿態進行調節;肩旋轉關節、肩擺動關節和肘關節確定末端機械手的空間位置。機械手臂安裝在履帶式車體上,極大地擴展了操作空間,提高了工作柔性。

圖1 機器手臂本體結構
2 機械手臂正運動學分析
為直觀描述機械手臂結構特點,初始設定各關節角度值分別為====0,=-π/2。采用CRAIG提出的改進后的D-H法建立連桿坐標系(圖2),表1是與之對應的D-H參數表。為簡化模型,坐標系{0}和{1}固定在肩旋轉關節中心處,坐標系{2}固定在肩擺動關節中心處,坐標系{3}固定在肘關節,坐標系{4}和{5}固定在腕部,坐標系{6}固定在機械手中心。

圖2 機械手臂連桿坐標系

表1 機械手臂D-H參數表
2.1 機械手臂正運動學建模


(1)
將D-H表中各關節參數依次代入到式(1),可得相鄰關節坐標系之間的變換矩陣:

(2)
式中:c=cos;s=sin;=1,…,5。

(3)
式中:=299.21 mm,為機械手與相關連接件的長度。

(4)
式中:[]、[]、[
]是末端機械手坐標系相對于基坐標系的姿態向量;[]是位置向量。末端機械手可達工作空間主要由位置向量決定,解得:

(5)
2.2 正運動學模型驗證
利用MATLAB Robotics toolbox 10.3.1中的Link和drivebot函數構建機械手臂可視化模型。代入設定初始關節角度=(0,0,0,-π/2,0),此時機械手臂處于水平伸展狀態(圖3),與圖2所示的連桿坐標系姿態一致,驗證模型的正確性。

圖3 機械手臂可視化模型
由圖3可知:調節仿真模型中左下方的角度滑塊可隨機改變機械手臂各關節的角度值,機械手的位姿根據角度值的改變實時發生變化,進而可實現實時在線調控。
為進一步驗證模型的準確性,隨機選取5組符合各關節角度范圍內的角度值分別代入式(3)和 Robotics toolbox 10.3.1建立的可視化模型中計算,并將得到的位置向量進行比較(表2)。
隨機選取5組角度值為
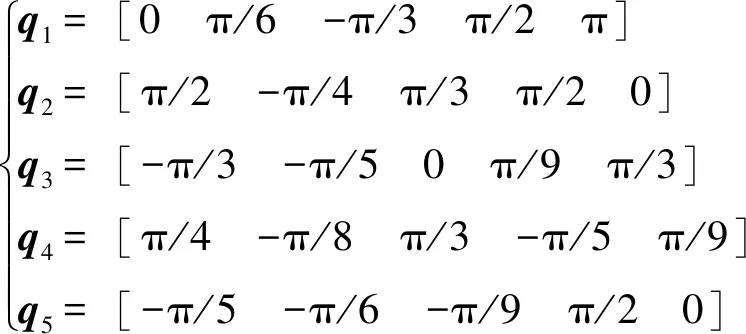

表2 理論計算值與仿真求解值對比
從表2可以看出:經過5次隨機取值,由正運動學方程理論計算求出的機械手位置向量與仿真計算得到的結果誤差相對較小,驗證了所建模型的準確性。
3 末端機械手工作空間分析
機械手臂工作空間由末端執行性可達空間所有位置點的集合構成,其形狀和尺寸對于機械手臂合理的結構設計具有重要的指導意義。相比柵格法和幾何法,蒙特卡洛法(Monte Carlo Method) 因具有強大的圖形顯示功能、計算速度快和簡單易行的特點,常應用于機械手臂工作空間的求解。 在MATLAB中,可通過編程方式完成蒙特卡洛法對機械手臂工作空間的求解,流程如圖4所示。

圖4 工作空間求解流程
仿真時,隨機取=50 000,求得末端機械手可達空間點云圖(圖5)。

圖5 末端機械手可達空間點云圖
從圖5可知:末端機械手的可達工作空間形狀近似為球體,且運動空間內無空洞,即機械手臂幾乎可以達到區域內的所有空間。
為進一步分析末端機械手的移動范圍,提取工作空間邊界面上的點并構造機械手臂在、、3個平面上的邊界曲線(圖6)。可知:末端機械手工作空間沿、、三軸的移動范圍依次為[-1 435.534, 1 434.791]mm、[-1 465.371, 1 460.124]mm、[-1 466.753, 1 466.017]mm。

圖6 工作空間輪廓邊界
4 末端機械手工作空間體積計算
圖5僅描繪末端機械手可達工作空間點云圖的大致形態,若要進一步求解工作空間體積,就必須創建一個較為精準的包絡空間,并計算該包絡空間體積大小來描述工作空間。為此,利用MATLAB中convhull函數提取點云圖中邊界面上的點,并在此基礎上生成由諸多三角面片拼接而成的包絡空間(圖7)。經計算,該包絡空間即末端機械手的工作空間體積為13.24 m。

圖7 利用convhull函數生成的包絡空間
4.1 各桿長和偏置距離對工作空間的影響
在保證其他參數不變的情況下,計算各連桿長度以及關節軸線間偏置距離對工作空間的影響(圖8)。

圖8 桿長及偏置距離對工作空間體積影響
從圖8可以看出:機械手臂各桿長及偏置距離等5個參數皆對工作空間產生正相關的影響,但影響程度不同,桿長對工作空間影響最大,然后依次為桿長、偏置距離、、、。
4.2 各關節轉角對工作空間的影響
通過單獨改變機械手臂某一關節轉角范圍來分別計算各關節轉角對其工作空間的影響(圖9)。

圖9 關節轉角范圍變化對工作空間體積影響
從圖9(a)可知:隨著肩旋轉關節轉角范圍的不斷增加,機械手臂工作空間的體積也隨之增大。當肩旋轉關節轉角范圍為-178°~178°時,工作空間體積從0增加到13.24 m。圖9(b)和9(c)為肩擺動關節和肘關節對工作空間體積的影響,工作空間體積與轉角值皆呈正相關的變化趨勢。從圖9(d)中可知,腕部俯仰關節轉角變化對工作空間體積影響較小,且曲面凸凹不平。
5 抓取應用實驗
氣動四指機械手的抓取實驗驗證了機械手具有穩定靈活的抓取能力。將機械手臂安裝在履帶式機器人上,可用于餐飲服務行業,實現了食品和餐飲器具的柔性抓取問題,提高了效率,減輕了勞動強度。圖10為機械手臂對餐飲器具抓取實驗,具體步驟如下:車體先運動到合適位置;其次調整前3個旋轉關節,使機械手對準物體,然后調整腕部兩關節使目標物體位于機械手包裹區域內;最后對機械手各手指施加氣壓,通過各手指間的相互配合來完成抓取任務。

圖10 機械手臂抓取實驗
6 結論
(1)基于改進的D-H法建立了機械手臂正運動學模型,推導得末端機械手的位置向量與各關節轉角之間的關系,并通過仿真結果與理論計算相對比驗證了模型的正確性。
(2)采用蒙特卡洛法得到了末端機械手可達空間點云圖,并通過提取工作空間邊界曲線,獲得末端機械手沿、、三軸的移動范圍依次為[-1 435.534,1 434.791]mm、[-1 465.371, 1 460.124]mm、[-1 466.753, 1 466.017]mm。
(3)采用convhull函數生成包絡空間的方法,求得了末端機械手工作空間體積13.24 m。通過單一變量法分析了機械手臂各桿長及關節轉角等參數對工作空間體積的影響。結果表明:桿長對工作空間影響最大,其次為桿長,偏置距離影響最小;各關節轉角對工作空間影響程度由大到小依次為肩旋轉關節、肩擺動關節、肘關節和腕部俯仰關節。
(4) 進一步在非結構化環境中測試了機械手臂可完成對不同形狀物體的穩定抓取、搬用等任務,驗證了該機械手臂的實用性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
電腦報(2020年35期)2020-09-17 13:25:53
數學物理學報(2020年2期)2020-06-02 11:29:24
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
光學精密工程(2016年6期)2016-11-07 09:07:19
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
