破拆機器人臂系動態特性及能耗分析
2022-09-21 08:28:34秦蒙陳良培
機床與液壓 2022年17期
關鍵詞:系統
秦蒙,陳良培
(1.重慶電力高等專科學校信息工程學院,重慶 400053;2.中國科學院深圳先進技術研究院光電工程技術中心,廣東深圳 518055)
0 前言
21世紀以來我國經濟高速發展,針對災后救援、破拆、礦山開采等高危環境所需拆除作業機器人迅速提升。瑞典的BROKK、日本的TMSUK及國內的驚天液壓等都開發了專門的產品用于彌補市場的空白。在破拆機器人向功能化、規范化、系列化發展的過程中,對系統動態特性、位置精度、能耗等諸多方面提出了更為嚴苛的需求。
針對控制精度,劉漢杰采用具有參數自整定功能的單神經元PID控制策略對液壓缸位置閉環控制系統進行優化;崔慧娟采用RBF神經網絡PID控制液壓活塞運動,提高位置精度。針對能耗回收,夏連鵬等對挖掘機大臂提出了三腔液壓缸的設計,通過連接蓄能器實現了能量回收利用;李培等人設計了一種由換向閥、液壓馬達、發電機和蓄電池等構成的能量回收系統,實現了大臂能量回收。上述研究僅單一地提升了系統位置精度或者回收了能耗,未充分考慮整機的動態特性及相互之間的耦合關系。
為了充分驗證耦合設計對系統位置精度和動態特性的影響,作者首先基于ADAMS軟件建立破拆機器人機械系統,然后基于AMESim軟件搭建常用的閥前補償負載敏感系統驅動破拆機器人;通過將油缸位移反饋到控制器建立基于PID的閉環位置誤差補償控制策略,通過對大臂進行驅動缸和平衡缸的雙液壓缸驅動設計,實現大臂重力勢能的回收再利用;最后通過ADAMS-AMESim軟件之間的接口建立破拆機器人機-電-液耦合一體化的虛擬樣機,基于聯合仿真模型對系統的耦合動態特性及能耗展開分析。
1 破拆機器人虛擬樣機
為了計算液壓系統的動態特性和真實的運動規律,計算破拆機器人在運動至極限工況作業狀態下各油缸、伺服閥的工作狀態和整個過程的位置精度等,須建立破拆機器人的精確虛擬樣機進行仿真分析和性能驗證。基于SolidWorks軟件建立某型號破拆機器人三維模型如圖1所示,全機采用液壓驅動,動力強勁。主要結構分為4個部分:履帶式移動平臺、大臂、二臂及末端的破拆臂和破碎錘。破碎錘通過末端多功能快速轉接平臺進行連接,可完成多方向破拆作業。

圖1 破拆機器人整機
破拆機器人聯合仿真虛擬樣機搭建采用ADAMS動力學仿真軟件完成,通過將三維模型導入ADAMS并設置零件材料屬性、各部件之間的約束關系、負載、驅動等參數完成虛擬樣機基本設置。根據輸入輸出關系完成聯合仿真接口設置,導出接口文件,為基于AMESim主控的聯合仿真做準備。
2 破拆機器人液壓系統
破拆機器人液壓系統對整機的的工作性能起到決定性作用,工程機械的繁榮助推液壓傳動技術不斷發展,取得了長足進步。目前工程機械常用的液壓系統主要包括閥控和泵控系統兩種,使用較多的為閥控液壓系統。自20世紀60年代恒功率變量泵的問世解決了工程機械柴油機易出現高功率過載問題后,出現了多種液壓控制系統,包括HITACH公司采用的正流量系統和國內常用的負流量控制系統等。90年代以后主要以負載敏感系統為主。負載敏感系統可以實時根據負載壓力調控負載敏感泵的敏感腔和LS閥,使泵出口壓力和流量根據負載需求實時變化,大大降低系統的能耗。負載敏感系統具有結構緊湊、效率高、泵輸出壓力與系統最大負載相適應的特點,應用十分廣泛,為此作者采用負載敏感原理建立破拆機器人的液壓系統。
2.1 負載敏感系統原理
圖2所示為閥前補償負載敏感系統的原理。工作過程:首先通過梭閥2篩選出各執行器的最大負載壓力,傳遞給負載敏感泵的LS閥;然后基于LS閥和變量缸的自適應調節能力調節變量泵的出口壓力和流量,始終高出負載所需最大壓力Δ。通過設定Δ的大小可實現自適應調節系統壓力和流量與執行器負載壓力和流量,最大限度地節約系統能耗。在不考慮流量飽和的狀態下,由小孔節流原理可知,流過圖2中元件3的流量為
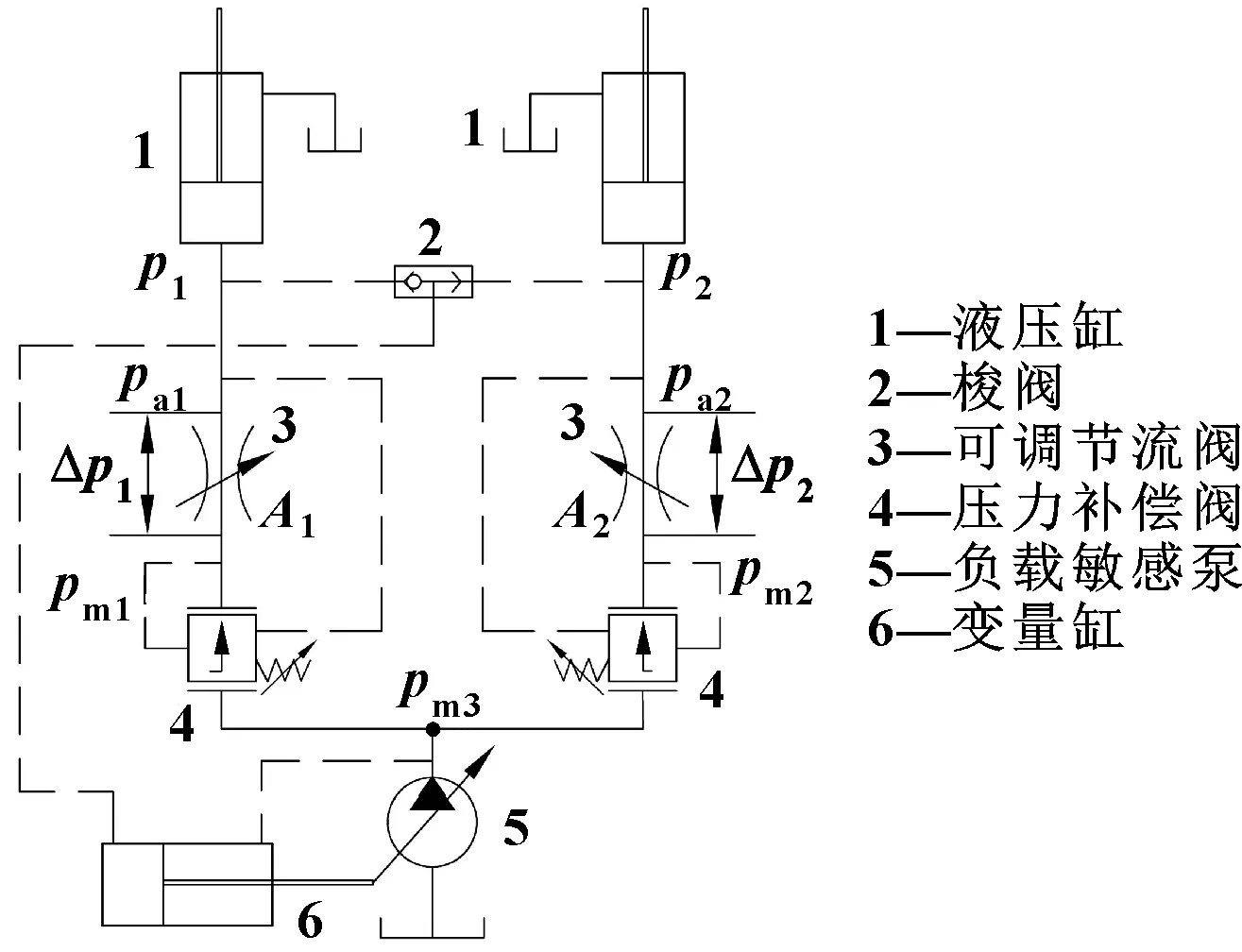
圖2 閥前補償負載敏感系統

(1)
(2)
式中:、為流量系數;、為元件3的開口面積;Δ、Δ為元件3前后壓差;表示液壓油密度。
式(1)(2)中,液體流量系數和油液密度可認為是不變的,因此當元件3前后壓差Δ相等,則流過元件3的流量僅與元件3的開口面積有關,如果元件3前后壓差相等且恒定,即:
Δ=Δ=
(3)
則流過元件3的流量僅與過流面積和有關,通過比例控制閥口開度即可實現對執行器的比例控制。LS負載敏感系統采用定差減壓閥作為壓力補償閥,保持元件3兩端壓力差恒定,根據定差減壓閥的工作原理可知:
Δ=-=
(4)
Δ=-=
(5)
式中:、為元件3進口壓力;、為元件3的出口壓力。通過設定壓力補償閥彈簧壓力使得Δ=Δ=,實現對單泵多執行器系統的運動控制。
2.2 基于PID閉環位置誤差補償
由于采用開環直接控制元件3開合的方法,無法實現破拆機器人精確的定點定位作業任務,且由于油缸和各控制閥的油液細微泄漏無法避免,導致靜態末端位置的蠕變,進一步影響作業精度。為此,基于閥前補償負載敏感系統工作特點,將各油缸位移信號通過位移傳感器反饋到控制器與目標位置信號做差,再通過PID進行位置誤差信號的整定,實現對油缸的閉環位置控制,提高破拆機器人作業位置精度和穩定性,補償由于泄漏等外界因素造成的各油缸定位誤差。
2.3 雙液壓缸節能原理
由于單泵多執行器負載敏感系統泵輸出壓力僅與系統最大負載相適應,對于此研究所述破拆機器人大臂負載明顯高于其余各臂,系統最大壓力與大臂所需負載壓力相適應,導致其余各臂在壓力補償閥上壓力損失較大,不僅浪費能量增加油耗,而且還會產生系統過熱,減小元器件的使用壽命。
為此,開發一種大臂雙液壓缸節能控制系統,結構原理如圖3所示。大臂雙液壓缸從工作原理上分為主驅動缸和重力負載平衡缸,驅動油缸和平衡油缸并排放置于大臂兩側,共同支撐大臂及其余各臂的重力。大臂的精確運動位置由大臂驅動缸進行控制,重力負載平衡缸主要作用是平衡大臂過剩的重力勢能,通過將重力負載平衡缸與單向閥和蓄能器相連實現對大臂重力勢能的回收再利用。工作過程如下:當大臂下降時,單向閥關閉,大臂平衡缸無桿腔向蓄能器儲能;當大臂上升時,蓄能器內的高壓油釋放輔助推動大臂平衡缸運動,實現大臂一個伸縮工況內的能量回收再利用。

圖3 雙液壓缸大臂能量回收模型
3 破拆機器人機電液一體化建模
通過將第1節建立的某型破拆機器人ADAMS虛擬樣機模型導入AMESim軟件可完成機械系統的建模。基于第2節破拆機器人液壓系統閉環控制和雙液壓缸節能設計原理,采用AMESim軟件的液壓元件庫和HCD庫搭建液壓系統的虛擬樣機模型。將機械系統模型與液壓系統模型通過輸入輸出接口建立聯系,最終完成破拆機器人機電液一體化聯合仿真模型,如圖4所示。其中最上部為機械系統導入模型,中間為閥前補償負載敏感系統和雙液壓缸節能系統模型,最下部為負載敏感泵模型。聯合仿真系統關鍵參數的設置如表1所示。

圖4 破拆機器人機電液一體化仿真模型

表1 模型關鍵參數
4 動態性能及能耗分析
基于ADAMS和AMESim建立的機電液一體化模型對破拆機器人動態特性進行研究。設置AMESim為仿真主控窗口,設置聯合仿真時間為18 s,采樣時間間隔為0.01 s。基于最遠極限位姿破碎作業工況設置運動路徑。運動過程為:首先破拆機器人多臂協同運動到最遠破碎位姿,然后展開作業,最后返回初始位姿。通過多臂協同運動驗證系統的動態特性與工作性能。
4.1 基于PID的閉環動態特性分析
首先對破拆機器人基于PID的位置閉環誤差補償進行研究,設置各液壓缸的驅動信號如圖5所示。通過各臂油缸的分步協同運動驗證整個液壓系統的穩定性和位置精度。在虛擬樣機仿真結束后,從AMESim調取大臂油缸、二臂油缸、破拆臂油缸及比例閥和負載敏感泵的壓力、流量、功率能耗等參數曲線如圖6—圖12所示。

圖5 驅動信號 圖6 活塞桿伸縮位移曲線

圖7 油缸及泵壓力曲線 圖8 泵輸出與油缸壓差

圖9 各臂流量曲線 圖10 泵輸出流量曲線

圖11 各油缸功率曲線 圖12 泵與各油缸功率曲線
由圖6—圖12可得:起始階段1~4 s,大臂、二臂和破拆臂油缸依次開始運動,將破碎錘運送到最遠作業位姿,驗證系統動態特性和抗流量飽和能力。從仿真結果可知:在給定的各臂運動速度下,整個液壓驅動系統穩定性較高,各臂油缸的流量、壓力呈現出衰減性波動,并逐漸穩定到設定值。泵輸出壓力和流量可實時根據系統最大負載壓力和多臂協同流量總和進行實時自我修正,工作性能良好。
停止階段5~8 s,大臂、二臂和破拆臂油缸依次到達設定位置區域并停止運動,通過調節PID參數可設定停止速度和位置精度。通過仿真結果可得:經過PID整定后,各臂油缸緩慢接近目標點并最終穩定地停在設定位置,各臂油缸的位置誤差小于1 mm,精度較高。泵輸出壓力和流量根據各臂油缸的停止依次減小輸出,實時有效地跟蹤了負載需求。
回程啟停階段8~18 s的液壓系統系統動態特性與起始階段類似,不再贅述。
破拆機器人極限位姿多臂復合動作聯合仿真結果表明:基于PID的油缸位置閉環誤差補償系統效果良好,有效避免了油液泄漏和人工操作等造成的位置誤差,易于實現精確數字化控制。大臂、二臂及破拆臂油缸壓力和流量均出現衰減性振蕩并快速穩定到設定值,動態特性良好。泵輸出的壓力和流量可快速自適應跟隨負載的需求,從而降低了系統能耗,避免油液過熱造成污染。基于ADAMS和AMESim仿真軟件實現破拆機器人機械系統與液壓系統的聯合,可精確模擬系統各部件的動態特性和整個系統的工作性能,提高了仿真精度和設計工作效率。
4.2 基于雙液壓缸的大臂能量回收分析
為了更好地驗證大臂雙液壓缸能量回收系統的效果,設定大臂單獨的伸縮運動位移曲線如圖13所示,設定蓄能器體積為10 L,充液起始壓力為55 MPa,仿真結果如圖14—圖18所示。

圖13 大臂位移曲線 圖14 大臂油缸輸出力曲線

圖15 蓄能器體積變化曲線 圖16 蓄能器壓力變化曲線
由圖14—圖18可得:第一個升降工況:0~9 s大臂下降階段,大臂及前端機械臂的重力勢能存儲到蓄能器內,蓄能器充液,壓力升高,在備壓作用下,機械臂自重主要由平衡缸承擔,驅動缸僅需很小的驅動力即可推動大臂完成油缸收縮運動控制;10~17 s大臂抬升階段,蓄能器壓力釋放,輔助大臂驅動缸完成抬升作業。蓄能器下設單向閥補償蓄能器泄漏等造成的影響防止吸空,同時又阻止了平衡缸高壓油的泄漏。通過多個伸縮工況的仿真結果發現,整個能量回收再利用過程,油缸速度、壓力平穩無多余的抖動現象,動態特性良好。由圖17可知:伸縮工況下蓄能器儲能功率大概2 kW,相比于圖18大臂單缸無能量回收的伸縮運動工況,節能效率超過60%,可見雙液壓缸節能系統效果明顯。

圖17 蓄能器存儲功率曲線 圖18 泵輸出功率曲線
5 結論
針對破拆機器人高精度和低能耗的耦合技術需求,提出了基于PID的油缸桿位置反饋的閉環控制系統和雙液壓缸節能控制原理。通過ADAMS-AMESim軟件的聯合仿真,建立了破拆機器人機電液一體化的虛擬樣機模型。通過仿真分析了多臂復合運動狀態下,基于PID的位置反饋閉環控制系統的位置精度和動態特性,以及基于雙液壓缸大臂能量回收系統的動態特性和能耗。結果表明:基于PID的閉環控制系統位置誤差小于1 mm,有效補償了泄漏等造成的影響且動態特性良好;雙液壓缸大臂能量回收系統降低泵輸出功率60%以上,使系統更加節能高效。位置精度與能量回收的耦合控制下動態穩定性較好,為實際應用提供了參考。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
