雙臂協作機器人運動可靠性評估
2022-09-21 08:28:20解磊磊吳海淼崔國華曹雪山
機床與液壓 2022年17期
關鍵詞:方法
解磊磊,吳海淼,崔國華,曹雪山
(1.河北工程大學機械與裝備工程學院,河北邯鄲 056038;2.上海工程技術大學智能機器人研發中心,上海 201620)
0 前言
雙臂協作機器人在實際工程中的應用越來越多,如汽車和航空航天制造、精密產品的自動裝配廠和醫學手術。眾所周知,由于連桿尺寸、關節間隙、驅動致動器和制造偏差等存在不確定性,末端執行器的位置無法精確控制。即末端執行器的實際姿態不可避免地偏離設計指定的姿態。因此,根據這些不確定性因素預測運動可靠性是保證雙臂協作機器人工作性能的關鍵,然而保證機器人的位置可靠性在實際生產中對于控制產品質量是非常重要的。
機器人可靠性評估是指2個末端執行器的相對位置誤差在整個運動范圍內落入指定安全邊界內概率的計算,可靠性分析方法以解決隨機尺寸和關節角度對機器人機構工作性能的影響。許昌瑀等采用蒙特卡洛模擬法,基于數學推導末端執行器與關節間隙的數學模型,求解定位誤差的可靠性,然而沒有考慮連桿尺寸的偏差,同時此方法需要大量的數據且效率不高。王海芳等基于二階矩和攝動法結合的混合方法建立了滿足正態分布隨機變量的機器人運動精度可靠性模型,并分析了運動精度可靠性對基本參數均值的可靠性靈敏度。WU等以稀疏網格數值積分和鞍點近似研究工業機器人的定位精度和軌跡精度可靠性。王偉等人采用四階矩估計和最大熵法考慮連桿尺度和關節間隙,研究運動精度可靠性。考慮雙臂協作機器人本體誤差對運動穩定性和可靠性的影響,建立含本體誤差的機器人運動學模型,本文作者提出二次四階矩估計法和體系可靠性方法應用于雙臂協作機器人求出運動可靠性,研究離散點的位置誤差極值分布與整個路徑可靠性之間的關系。將路徑點位置誤差極值作為隨機變量,得到機器人系統的功能函數。該方法所需樣本少、計算效率高,且計算精度較高。
1 機器人運動學模型
雙臂協作機器人由L機器人和R機器人構成,如圖1所示,六軸機器人前3個關節確定末端執行器的位置,后3個關節確定末端執行器的方位。通過改進Denavit-Hartenberg(D-H)方法建立雙臂協作機器人的構型圖,如圖2所示。
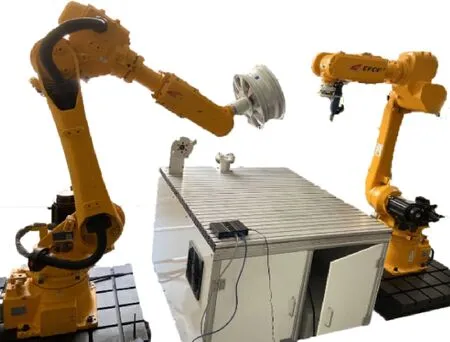
圖1 雙臂協作打磨機器人本體

圖2 雙臂協作機器人構型
1.1 正運動學分析
雙臂協作機器人系統中和R機器人呈對稱分布,以L機器人為例根據改進D-H方法建立運動學模型。

(1)
式中:s=sin、c=cos、s=sin、c=cos。
根據圖3所示的連桿坐標系,可得D-H參數,如表1所示。
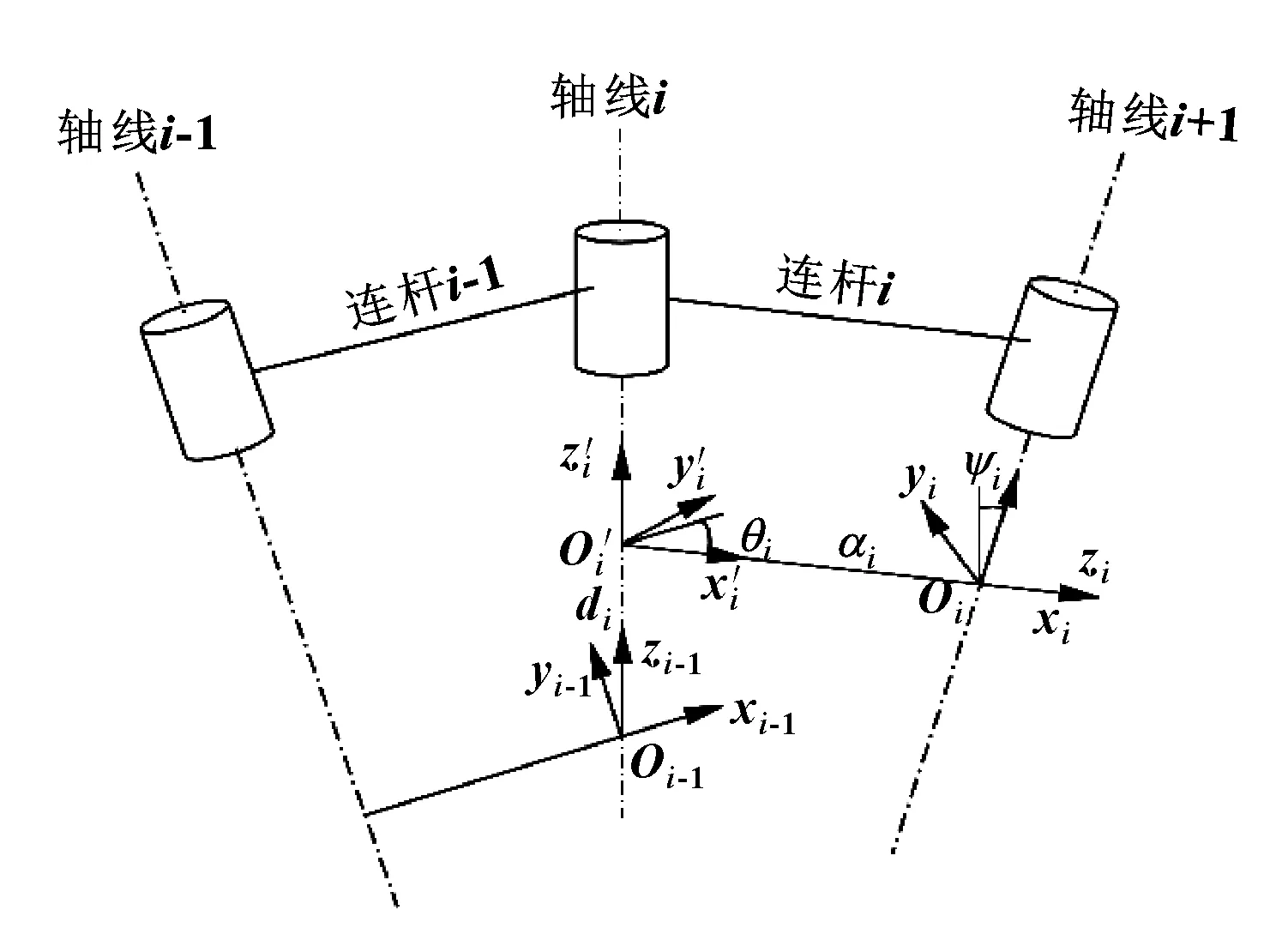
圖3 連桿坐標系

表1 雙臂協作機器人D-H參數
利用式(2)和表1所列D-H參數可以表示出末端執行器的位姿。

(2)
式中:′是自由度數量;向量[,,]是末端執行器的方向矩陣;為位置矢量。
1.2 逆運動學分析
利用反變換法求解機械人的逆運動學,根據已知的、、和求關節變量、、、…、的值,求解出各關節角度值如下:

(3)

(4)

(5)

(6)
=arccos(+-)
(7)

(8)
其中為一角度值,取值如下:

(9)

(10)
=-(-)
(11)
可得機器人8組逆解,但雙臂協作機器人只有一軸可在360°范圍內旋轉,因此有逆解不能實現。在雙臂協作機器人多解的情況下,選取最合適的一組解作為計算結果。
2 可靠性模型
2.1 參數分布


表2 連桿參數概率分布類型
2.2 極限狀態函數
只考慮機器人的位置誤差,機器人末端位置表示為
=()
(12)
對末端位置矩陣微分得到末端位置誤差:

(13)
假設實際的機器人末端位置為
=()
(14)
末端執行器位置點的位置偏差可表示為

(15)
當位置誤差()小于允許誤差Δ時,雙臂協作機器人才可靠,則位置點的可靠性極限狀態函數表示為
()=Δ-
(16)
位置點可靠度為
=Pr[()>0]
(17)
引入等效極值原則,取個位置點坐標值。引入變量,則最大位置誤差為
=max(,,,…,)
(18)
則系統可靠性極限狀態函數為
()=Δ-
(19)
定義()為可靠性極限狀態函數的概率密度函數(Probability Density Function,PDF),系統可靠度為

(20)
2.3 雙臂協作機器人可靠度計算
隨機變量{,,…,},變量的均值為,的前4階中心距為

(21)
令=(),則()的均值為
=Δ-
(22)
()的前4個中心距用變量的相應矩表示為
=(-1)=0,1,2,3,4
(23)


(24)
式中:為標準差;為偏態系數;為峰度系數。


=
(25)
其中,矩陣的元素和向量的分量分別為

(26)
(27)
由于(),(),,()線性無關,矩陣是+1階非奇異矩陣,故方程式(25)有唯一解。
設隨機變量的概率密度函數(),若隨機事件服從概率密度函數為()的連續分布,Shannon熵為

(28)
考慮將隨機變量的前階原點矩(=0,1,…,)作為約束條件,即使式(28)取最大值:
(29)
若取()=,()=1,則由式(26)—式(28)可得:

(30)
==0,1,…,
(31)
已知各階原點矩可解出(=0,1,…,),得到最佳平方逼近多項式(),于是:

(32)
為計算方便穩定,利用式(24),得到和的估計式分別為

(33)

(34)
單機械臂可靠度為


(35)
實際工程結構往往是復雜的,文中所研究結構屬于結構體系,因涉及多種失效模式,該結構可靠度實際上是體系可靠度。雙臂協作機器人看作組合體,且L機器人和R機器人為相互獨立單元,該系統可視為串聯系統,根據式(35)可求出雙臂協作機器人的可靠度:




(36)
3 機器人可靠性分析實例
為了驗證文中所采用的可靠性評估方法,以某雙臂協作打磨機器人為例,如圖1所示。通過MATLAB的Simulink模塊建立機器人正逆運動學模型,圖4為逆運動學模型,再通過MATLAB進行末端執行器的運動精度可靠性仿真。根據設定運動軌跡,模擬出機器人末端執行器的位置誤差,然后對理想軌跡點的數據進行計算,得出最大位置誤差,并循環得到1 000組最大位置誤差數據,可使用文中所提到的方法得到雙臂協作打磨機器人的運動可靠性。

圖4 逆運動學模型
3.1 運動軌跡
實驗為雙臂協作打磨機器人打磨輪轂:L機器人夾持輪轂,調整不同的打磨輪轂范圍;R機器人夾持打磨頭,根據L機器人所夾持輪轂位置,生成相應打磨軌跡并達到要求的精度。現取一打磨軌跡求解該打磨軌跡的可靠度。L機器人末端執行器運動到位置點(50,50,850)。R機器人末端執行器的軌跡路徑為

(37)
在軌跡路徑均勻取41個點,得到如圖5所示軌跡曲線。

圖5 軌跡曲線
根據位置點計算L機器人最大位置誤差,根據圖5軌跡中所取點計算出R機器人最大位置誤差,如圖6所示。

圖6 最大位置誤差數據
3.2 可靠度求解及結果分析
雙臂協作機器人可靠度分析方法的實現步驟為:取1 000組數據,求出每一組數據中最大位置誤差(=1,2,3,...,1 000),如圖6所示,求出最大位置誤差的均值,根據式(21)求出前4階矩如表3所示,再將隨機變量轉換為標準隨機變量,進而求得偏態系數和峰度系數。利用式(26)和式(31)計算出和,由方程組(25)求解出,進而計算、和。為了驗證該方法的準確性,將它與蒙特卡洛法進行對比,如圖7所示。

表3 最大位置誤差的前4階矩

圖7 可靠度對比
蒙特卡洛方法需要基于大量的樣本才能獲得比較準確的計算結果,整個過程非常耗時,所需總時間長,效率低。由于基于最佳平方逼近的二次四階矩估計法提取反映隨機變量統計特性的均值(一階矩)、方差(二階矩)、偏度(三階矩)及峰度(四階矩)的信息,進而推測出隨機變量的內在分布規律,采用體系可靠性方法可以計算出雙臂協作機器人的運動可靠性,該方法所需樣本較少計算時間短且計算精度高。由圖6可知:文中所提方法貼近蒙特卡洛法的計算結果,且雙臂協作打磨機器人在允許誤差大于4 mm時可靠度為1,L、R機器人在允許誤差4 mm時,最佳平方逼近圖線分別如圖8(a)和(b)所示。
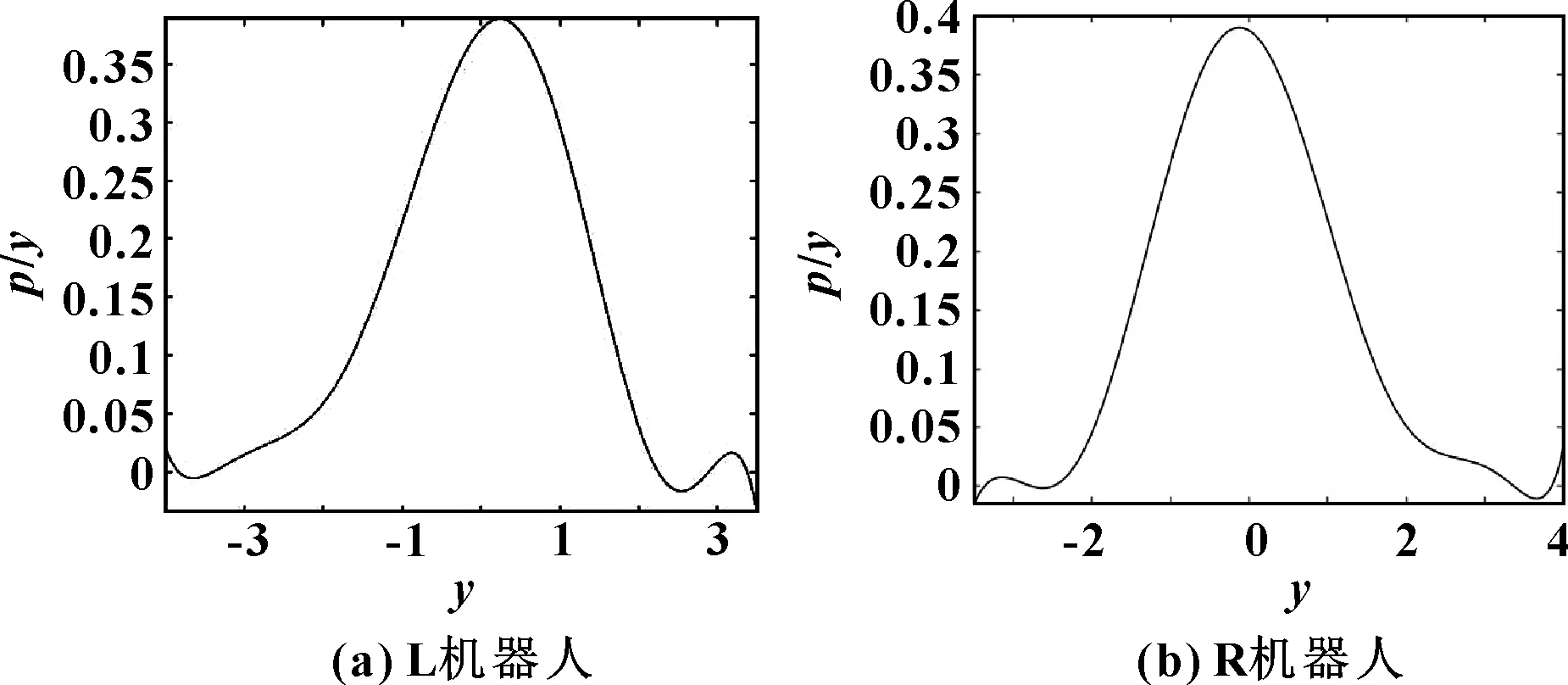
圖8 最佳平方逼近函數曲線
4 結論
在一定的軌跡精度要求下,機器人運動的可靠性主要取決于路徑中位置誤差最大的插補點的可靠性,得出各機械臂最大誤差的極限狀態函數,利用最佳平方逼近法產生概率密度函數,求出單臂可靠性。
雙臂協作機器人為串聯系統,任何機械臂失效則體系失效。采用體系可靠度的分析方法,求得系統可靠性。
基于雙臂協作機器人高精度、工作狀態難采樣的工作特性,文中采用一種基于二次四階矩估計法與體系可靠性相結合的方法,實現在較少樣本的條件下精確計算協作機器人的可靠性。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
