四足機器人跳躍步態主動柔順控制研究
2022-09-21 08:28:06李佳陽楊智勇張紫豪
機床與液壓 2022年17期
李佳陽,楊智勇,張紫豪
(湖北工業大學機械工程學院,湖北武漢 430070)
0 前言
近年來,隨著機器人技術不斷發展,四足機器人在軍事運輸、工業巡檢等領域得到了越來越廣泛的應用。四足機器人常用的步態主要分為靜態、動態兩大類。其中,機器人常通過腿部與身體解耦,以跳躍運動等步態通過各種崎嶇路面。機器人在跳躍后的落地瞬間會受到地面強烈的沖擊力作用,對其穩定性造成很大影響。因此,研究四足機器人的跳躍柔順控制具有重要的價值。
針對典型的跳躍步態,國內外已經有眾多學者開展研究。RAIBERT 和TELLO提出了一套經典的三通道足式機器人控制框架,通過構建虛擬腿實現單足機器人精確的彈跳運動,并將它推廣到雙足、四足等足式機器人中。基于該方法,BLACKMAN等設計了一種五連桿并聯四足機器人,并進行單腿模型試驗,實現了很好的跳躍效果;FUKUOKA和KIMURA采用了一種生物學方法,通過建立中樞神經機制,實現了四足機器人跳躍等多種經典步態;著名的波士頓動力公司研發的BigDog機器人基于彈簧負載倒立擺模型,實現跳躍等多種步態。國內對于足式機器人的研究稍晚,在國家863計劃提出“高性能仿生四足機器人”的主題背景下,浙江大學、山東大學、國防科技大學等高校均開展了一系列研究。針對四足機器人典型的跳躍步態,孟健等人通過控制腿部小幅度快速擺動,實現了經典的跳躍步態,并通過動力學仿真軟件,驗證了該方法的有效性;高炳微等建立了液壓單腿模型,通過五次多項式對腿部軌跡進行擬合,實現了跳躍步態,但腿部在落地瞬間會受到較明顯的地面沖擊力;劉明源等采用五桿的同軸腿,從能量利用率的角度,設計了一種電直驅四足機器人,實現四足機器人的跑跳運動;李奇敏等為提高四足機器人的抗沖擊能力,設計了一種具有彈性的連桿機構和線驅動系統的四足機器人,并采用姿態控制實現機器人的跑跳運動。綜上所述,使用彈性機構的被動柔順方法雖能在一定程度上吸收機器人跳躍步態產生的沖擊力,但無法自由快速調節柔順度,而通過建立虛擬腿實現主動柔順的控制方法,雖能實現較好的效果,但計算復雜,對控制系統硬件要求較高。
為提高四足機器人運動穩定性,本文作者提出一種四足機器人跳躍步態主動柔順控制方法。基于五連桿同軸四足機器人的設計方法,在電機輸出端使用扭簧作為輔助扭矩裝置,吸收機器人運動時的小幅沖擊;使用三次多項式擬合跳躍步態的機體質心軌跡曲線,并利用PD控制器修正落地相軌跡曲線,通過位置控制方法實現四足機器人的柔順跳躍。
1 四足機器人逆運動學分析
1.1 四足機器人基本結構
圖1所示為本文作者所設計的四足機器人實體圖,可知機器人由機身與4組腿部構成。每個腿部包含2個并列對稱放置的電機,分別驅動大小腿運動。腿部機構材料整體采用鋁合金與發泡材料相配合,采用螺栓聯接,在關鍵的緩沖位置,利用發泡材料的吸能特性,保護元器件不受損。主控核心使用STM32F4芯片,各模塊間使用CAN總線進行數據交互,使用型號為DJI RM3508的伺服電機為各關節提供動力,搭配型號為DJI C620的驅動器,使用位置控制方法實現機器人運動。
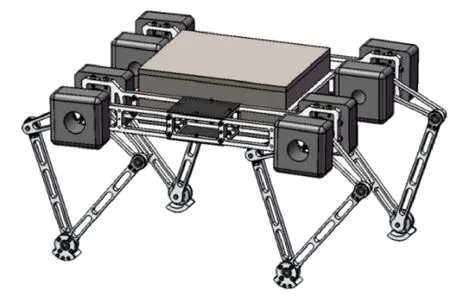
圖1 四足機器人
圖2所示為單腿實體圖,可知2個大腿與關節電機通過法蘭盤連接。電機直接驅動大腿,因此兩大腿為驅動桿,兩小腿為從動桿,兩大腿轉動一定的角度,改變足端在機身坐標系下的位置坐標。在四足機器人跳躍過程中,通過精確控制關節電機運轉角度,帶動大腿快速轉動,改變足端的位置,實現四足機器人的跳躍。
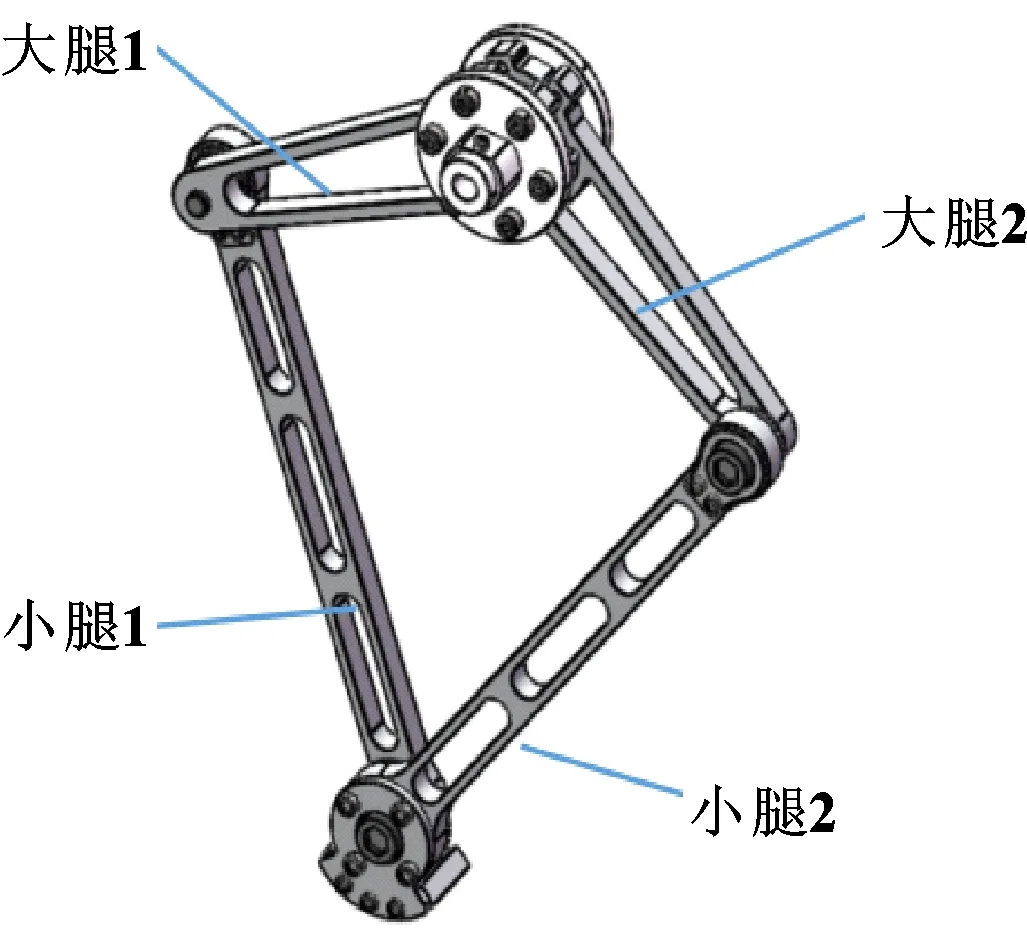
圖2 單腿
然而四足機器人在跳躍后落地的瞬間將受到地面較大的沖擊力作用,破壞機器人的結構穩定性,影響機器人運動性能。因此,跳躍步態伺服驅動環節應引入柔順控制,減輕機器人落地時受到的地面沖擊。
1.2 單腿逆運動學
本文作者使用位置控制的方法實現四足機器人的跳躍步態,具體控制思路為:機器人軌跡曲線規劃完成后,運用逆運動學方程求解各關節電機伺服驅動角,通過驅動器控制關節電機運動,實現機器人跳躍步態。圖3所示為四足機器人單腿模型。令大腿長,小腿長,線段為虛擬腿長,為機身高度,為足端移動距離,令虛擬腿與間夾角為腿角,虛擬腿與大腿夾角為連桿分離角,為電機驅動角1,為電機驅動角2。在△中,由三角函數幾何關系,得:

(1)
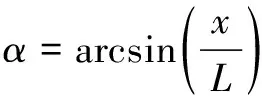
(2)
在△中,由余弦定理,得:
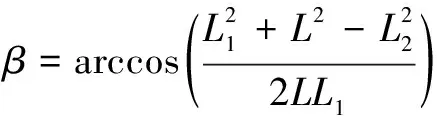
(3)
因此,根據圖3所示的角度關系,可知兩驅動桿旋轉的角度與足端坐標的關系為
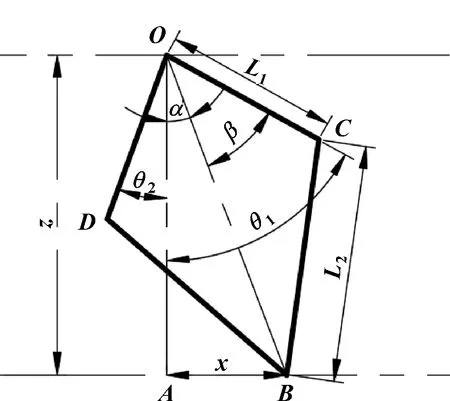
圖3 四足機器人單腿模型
=+
(4)
=-
(5)
將表達式(1)(2)(3)代入式(4)(5),化簡得四足機器人單腿運動的逆運動學方程為

(6)

(7)
機器人運動軌跡規劃確定后,由足端軌跡生成器求解足端坐標,再由該逆運動學方程計算出腿部驅動角。最終,關節電機根據計算結果執行動作,實現四足機器人的運動。
2 四足機器人跳躍步態
四足機器人的流暢運動歸功于腿部軌跡曲線的平滑控制,每一個跳躍周期可分為如圖4所示的4個步態,即蓄力起跳、騰空、落地緩沖、恢復站立4個階段。每個階段對應不同的腿部軌跡曲線。
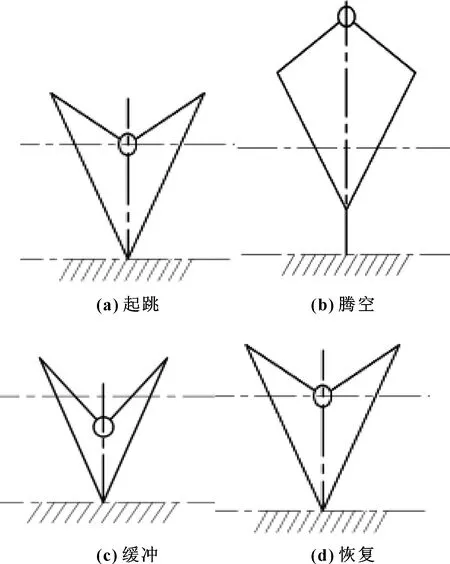
圖4 四足機器人跳躍過程
2.1 腿部軌跡規劃
在每一次起跳離開地面與落地接觸地面的瞬間四足機器人足端與地面的交互力將產生變化,若步態軌跡曲線設計不合理,則足端速度、加速度曲線將產生突變,使得機器人與地面交互力產生激變,如此長時間的往復運動將對機器人的結構穩定性造成破壞。因此,步態軌跡曲線的理想狀態是足端的速度、加速度是一個連續變化的過程,使得電機驅動大腿轉動的過程較平滑,確保機器人整體運動的穩定性。
在四足機器人起跳離開地面之前及落地接觸地面之后,足端始終接觸地面且無相對滑動,因此在這2個階段,足端在水平、豎直方向上均沒有位移,只需規劃機身質心軌跡曲線。目前四足機器人常用的軌跡曲線規劃方法有高次多項式、復合擺線、正弦軌跡等。其中,高次多項式與復合擺線規劃出的軌跡曲線相對連續,能在一定程度上減輕地面對機器人的沖擊力。復合擺線的軌跡方程計算量較大,較為復雜;高次多項式表達式簡單,計算輕便。其中,三次多項式軌跡函數能滿足機器人質心位移、速度、加速度曲線均連續變化的需求,因此文中采用三次曲線表達式,如式(8)所示:
=+++
(8)
令在起跳相中,機身質心高度由0時刻的上升到時刻的,速度由0時刻的0變為時刻的-,加速度由0時刻的0變為時刻的-,落地相同理。
利用上述約束條件求得機器人起跳相與落地相足端在豎直方向上的軌跡曲線函數、分別為
(9)

(10)
起跳相與落地相階段機器人質心位移與速度曲線如圖5所示。
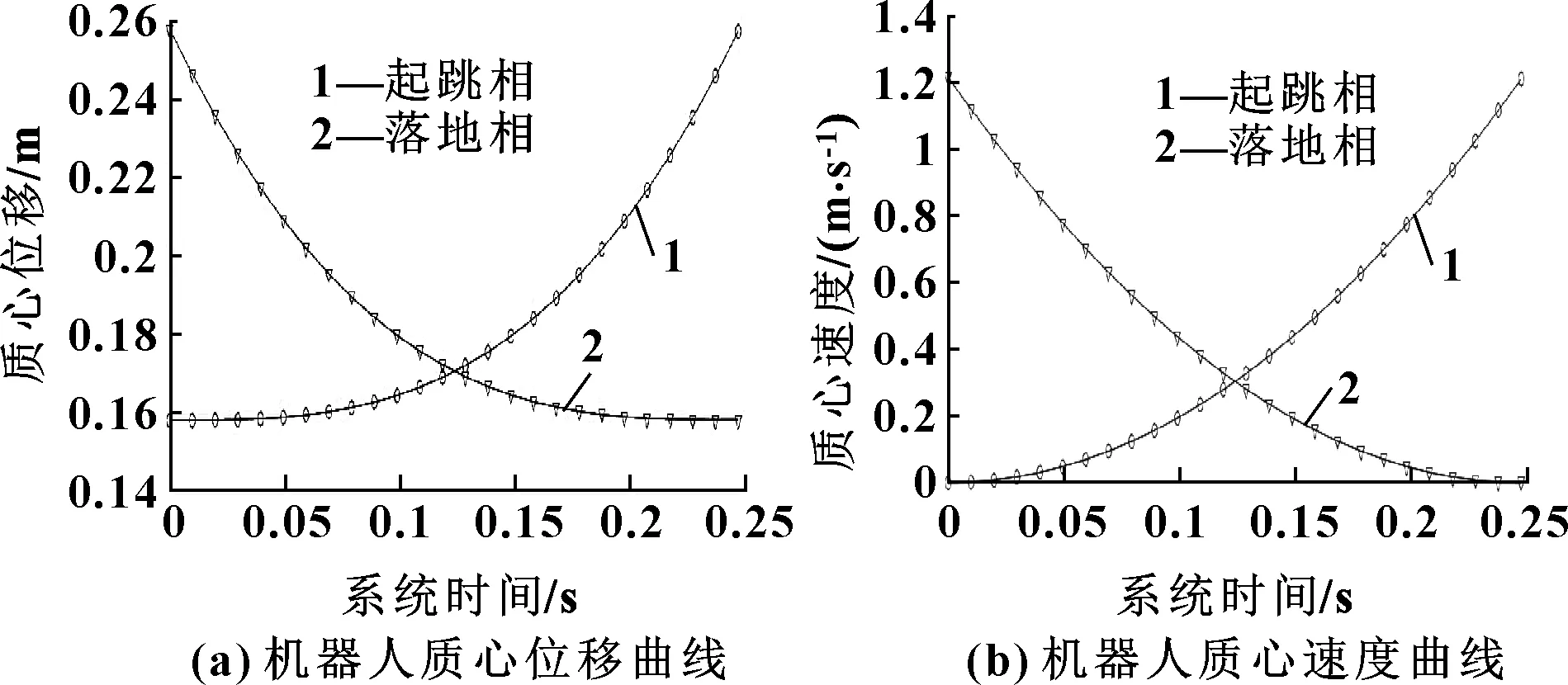
圖5 起跳相與落地相階段機器人質心位移與速度曲線
由圖5可知:機器人在起跳相內質心由站立高度0.157 m連續上升至起跳高度0.258 m,速度由0逐漸增加至1.21 m/s,且位移、速度曲線均連續變化,滿足機器人平穩運動需求,落地相反之。
在騰空相階段,四足機器人足端軌跡是一條拋物線,表達式為
(11)
(12)
=
(13)
其中:為機器人起跳離開地面時的質心高度;為起跳離開地面時的速度;為跳躍高度;為騰空相時間的1/2。將=0.258 m、=1.21 m/s代入式(12)(13),解得跳躍高度=0.074 m,騰空時間=0.247 s。將數據代入式(11),得到騰空相位移、速度曲線如圖6所示。可知:機器人在騰空相階段質心位移是一段標準的拋物線曲線,在=0.123 4 s時達到跳躍最高點。
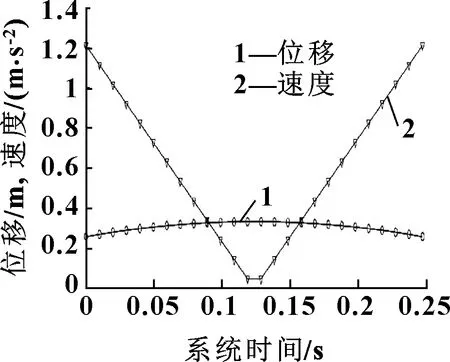
圖6 騰空相階段機器人質心位移曲線
綜上所述,在四足機器人每一次跳躍周期內,可通過運行時間來控制狀態機的切換,不同狀態對應不同的質心軌跡,實現四足機器人的跳躍步態。進一步引入PD控制器對上述軌跡函數進行修正,減弱落地時地面對機器人的沖擊力。
2.2 落地相軌跡修正
在工業機器人中,常用質量-阻尼-彈簧系統構建阻抗控制器,以對機器人進行精確力控。由于四足機器人足端頻繁與地面接觸,容易造成傳感器損壞,文中機器人足端并未設置力傳感器,無法對足端力進行閉環控制。為增加系統的彈簧-阻尼性能,結合PD控制器優化機器人落地相軌跡曲線,實現機器人跳躍。圖7所示為機器人跳躍步態控制流程。可知,步態振蕩器協調腿部相位后,經軌跡規劃得到質心位移函數,再與PD控制器計算得出控制量求和,使用逆運動學方程,將位移函數轉換為關節驅動角,最終由關節電機執行。
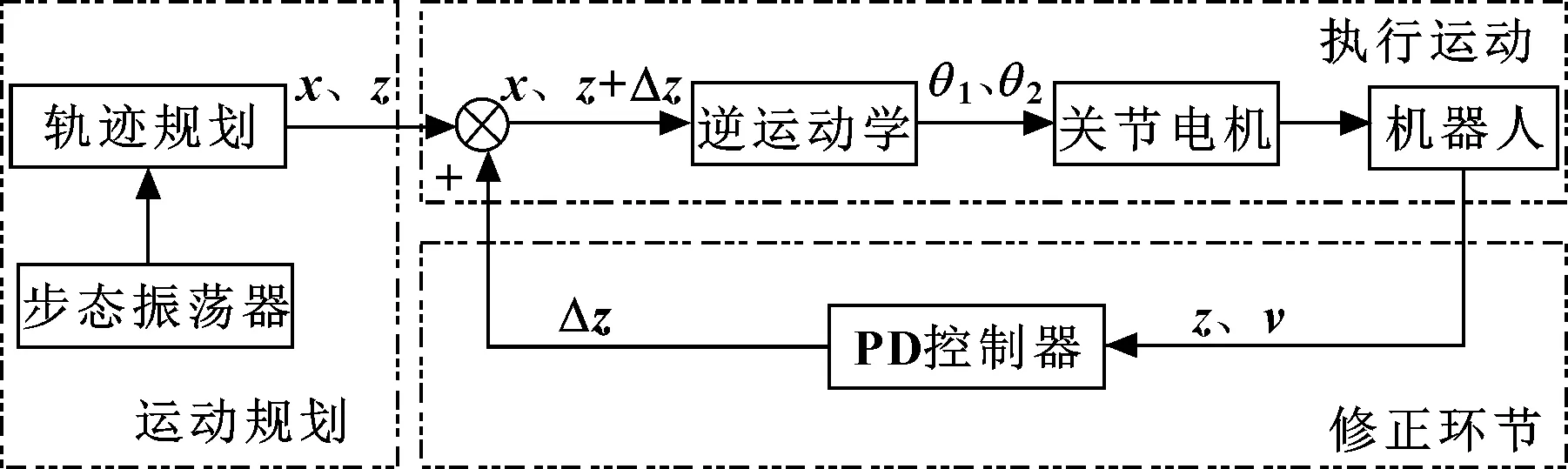
圖7 四足機器人跳躍步態控制流程
忽略空氣阻力的影響,在已知質心位移與速度的前提下,將落地相三次多項式表達式改寫為
=++++12[(-)+
(14)
令增益系數為1、初始值為15,令值分別為1、1.5、2,得到如圖8所示的修正后的落地相軌跡曲線。可知:引入PD控制器修正后的質心位移軌跡在落地階段先低于站立高度再恢復,即先收腿緩沖,再恢復站立;當為1時,改善效果并不明顯;當為2時,則收腿過低,反而影響了機器人的平穩性,因此,選擇1.5作為值。
圖8 不同kd值修正后落地相機器人質心位移曲線 圖9 不同kp值修正后落地相機器人質心位移曲線
同理,令增益系數為1,為1.5,令分別為15、30、45,得到如圖9所示的落地相軌跡曲線。可知:當為15時,落地緩沖的收腿動作速度過快,不利于穩定性;而當偏大時,修正量過大,在落地后的極短時間內,機器人質心高于起跳高度0.258 m,這樣的伸腿動作更易對機器人造成損傷,因此選擇30作為值。
3 試驗結果與分析
3.1 仿真結果與分析
四足機器人步態之間切換通過改變其擺動相占空比和相位差實現。為每條腿擺動相時間占一個步態周期的比值,相位差為腿部間相對運動時間差占整個步態周期的比例。跳躍步態時機器人四腿同時蓄力、騰空、著地,且該步態中機器人四條腿都具有對稱性,故不存在腿與腿之間相位差,即相位差為0。
借助Webots仿真平臺,搭建仿真環境及四足機器人,設置機器人質量為8 kg,使用電機作為關節執行器,設置最大扭矩為10 N·m。首先,使用軟件中提供的系統時間函數,直接獲取系統時間,將該函數作為基準時鐘脈沖,經步態時序運算器運算后,由傳感器反饋,通過PD控制器修正,將各腿最終的軌跡曲線參數輸入至逆運動學方程中,解算出各關節運轉角度控制量,利用電機控制函數控制關節運動。圖10所示為Webots仿真下的四足機器人跳躍過程,圖(a)為起跳準備階段,表現為四足站立,緩慢降低重心;圖(b)為起跳相,關節電機快速轉動,使機器人質心迅速提升;圖(c)為騰空相最高點,速度為0,并開始下降;圖(d)為落地相,表現為四足觸地,并降低重心,到達站立高度后繼續收腿,最終緩慢恢復站立。
圖10 Webots平臺實現跳躍步態
使用Webots中GPS節點對機器人機身在全局坐標系下的位置進行監測結果如圖11所示。可知:當不增加PD控制器進行柔順控制時(修正前),在跳躍落地后,機器人出現了前腿二次彈起的現象,同時,由于巨大的沖擊力,使得機器人在水平地面上的位置也發生了改變;而增加PD控制器修正落地相軌跡后(修正后),機器人平穩地落地,同時水平地面上的位置波動大幅度減小,說明該算法有效。
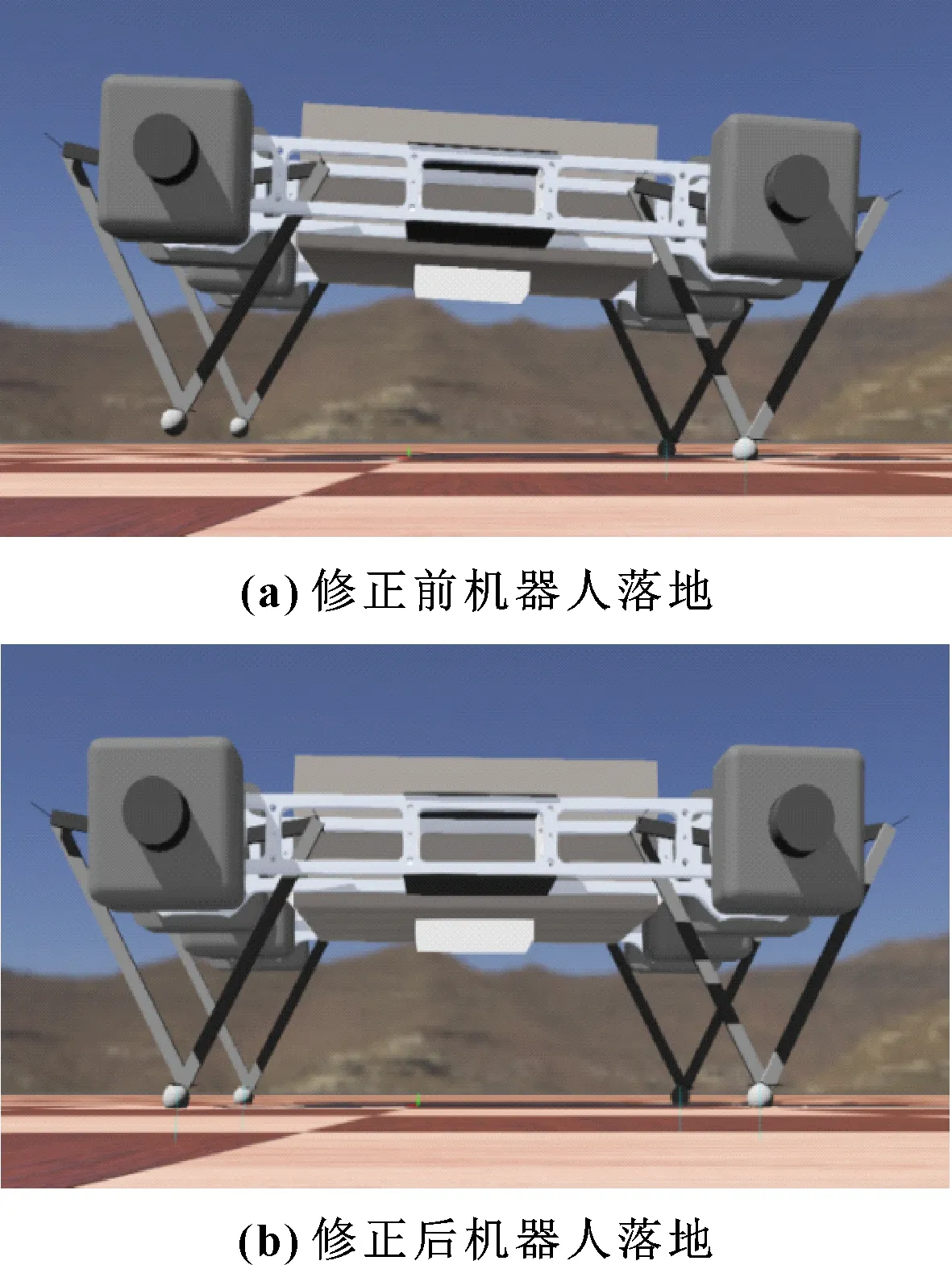
圖11 修正前后落地相穩定性對比
3.2 樣機測試與分析
制作試驗樣機主要參數如表1所示。在實體樣機中,機械部分使用鋁合金加工機身與腿部,選用型號為RM3508的伺服電機提供動力,該電機提供持續扭矩為3 N·m,峰值扭矩為5 N·m,搭配型號為C620的伺服驅動器,驅動器峰值電流為20 A。使用位置控制模式控制電機運動,設置一定跳躍角度,跳躍過程如圖12所示。
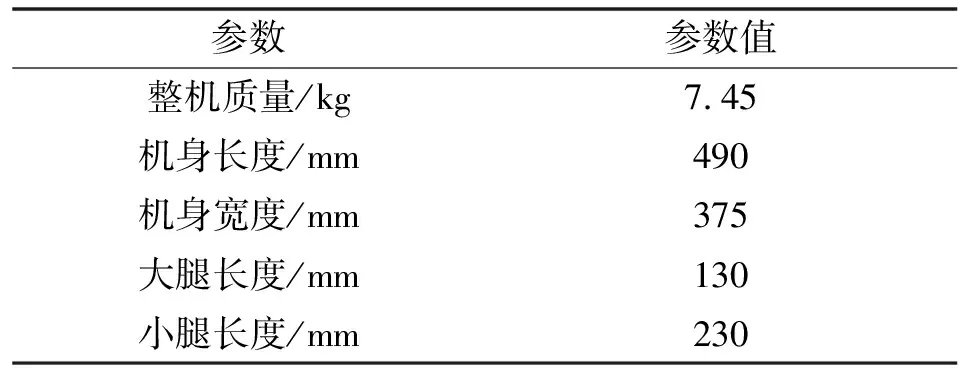
表1 樣機主要參數
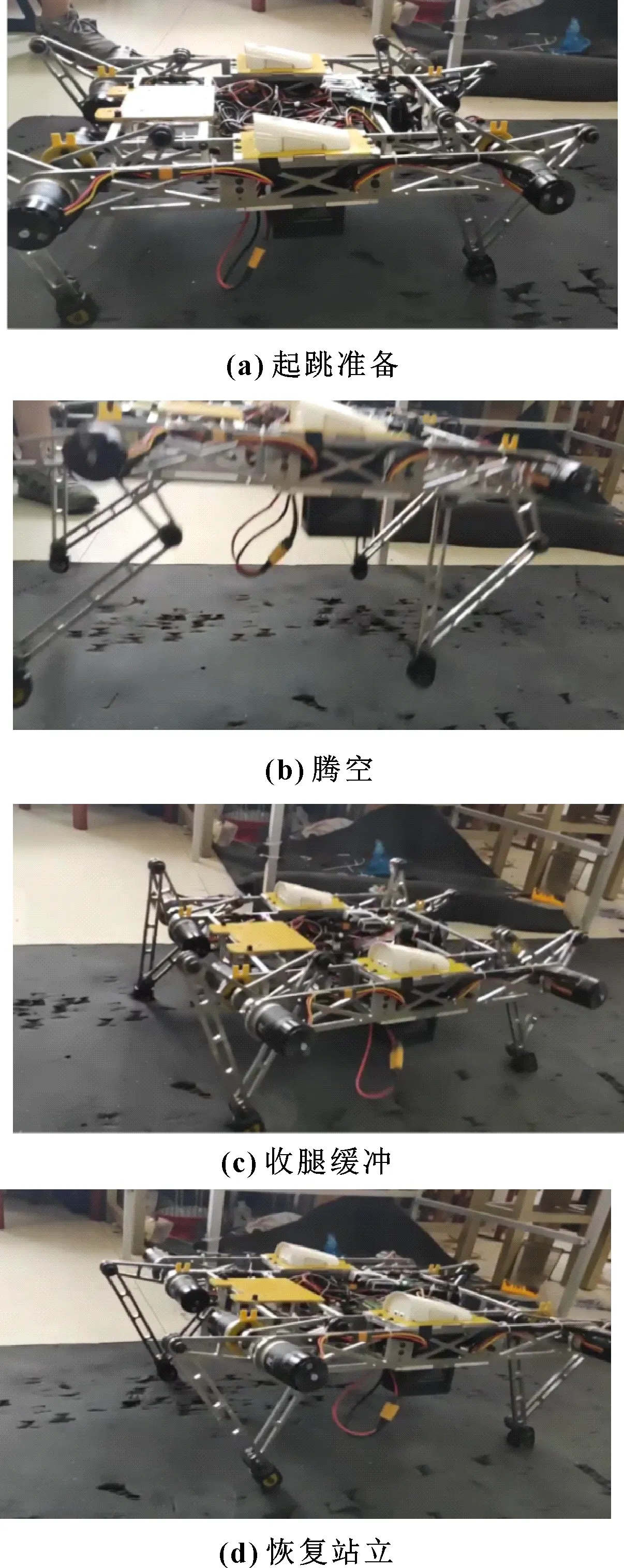
圖12 樣機跳躍過程
令、均為0,即未改變三次多項式軌跡函數,重復執行100次跳躍,結果如圖13左側腿部所示,大腿、小腿均出現了嚴重的彎曲變形。更換配件并調節參數,令增益系數=1.2,=22.0,=1.3,在同等運行工況下,如圖13右側腿部所示,未見明顯彎曲變形現象,驗證了該方法在四足機器人執行跳躍運動時可有效提高機器人的結構穩定性。
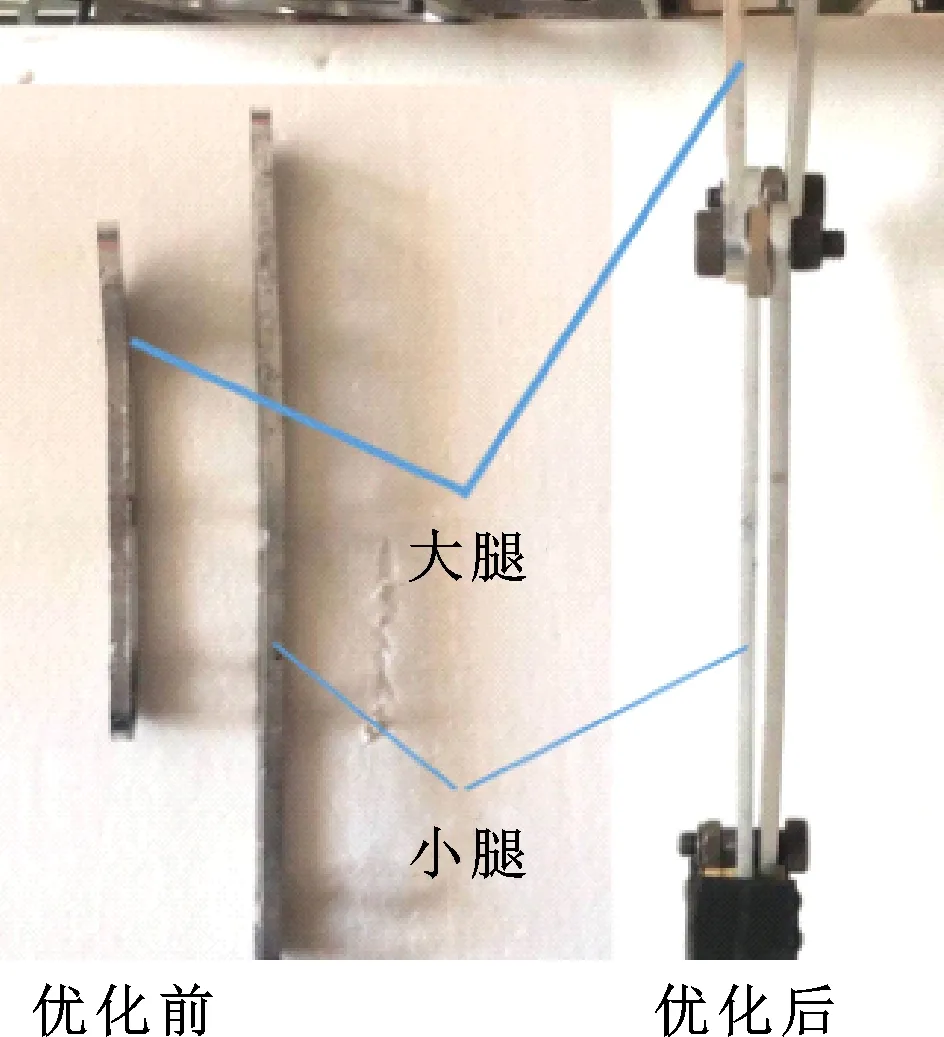
圖13 跳躍測試腿部彎曲對比
4 結論
四足機器人執行跳躍步態時,落地會受到地面較大的沖擊力,因而對機器人的穩定性造成影響。為了減弱這一影響,本文作者提出使用PD控制器修正落地相軌跡曲線的柔順方法,并基于位置控制模式實現機器人的跳躍。首先,通過試驗驗證了機器人結構設計的正確性;其次,通過Webots仿真平臺試驗表明增加修正環節能有效地緩解落地時機器人大幅度振蕩的現象,驗證了所提出的四足機器人跳躍步態柔順方法的有效性、可用性;最后,在滿足機器人跳躍運動的前提下,通過試驗樣機進行了大量重復性的跳躍運動。結果表明:引入PD控制器進行柔順控制能極大地減輕腿部彎曲變形程度,驗證了所提方法的可靠性、有效性。
