基于混合特征和CFOA-GRNN的行星齒輪箱故障診斷研究
2022-09-16 13:05:00許家才呂亮陸崇山代勁
機床與液壓 2022年6期
許家才,呂亮,陸崇山,代勁
(1.國能云南新能源有限公司,云南昆明 650200;2.武漢大學動力與機械學院,湖北武漢 430072)
0 前言
行星齒輪箱是機械傳動的關鍵部件,廣泛應用于車輛、船舶、風力發電等領域。由于惡劣的工作環境,隨著運轉時間的增長,齒輪箱中的齒輪會產生故障,進而造成損失。因此,實現齒輪箱故障診斷,及時識別出設備異常狀況,降低維護成本,減少損失,具有較大的工程意義。
目前,許多學者都對齒輪箱故障診斷進行了相關研究。張鑫等人利用離散小波變換獲取信號特征矩陣,并利用鯨魚算法優化的支持向量機實現齒輪箱混合故障診斷。李文耀和楊文剛提出了一種多點峭度和自適應模態分解的特征提取方法,用于齒輪箱復合故障診斷。吳康福和李耀貴將齒輪箱信號奇異值特征、樣本熵特征和時域特征進行融合,利用堆棧稀疏自編碼器實現特征優化和故障識別。王斌和崔寶珍將集合經驗模態分解和多尺度排列熵相結合,用于齒輪箱故障特征提取,并利用極限學習機進行故障識別。張陽陽等采用概率神經網絡進行車輛齒輪箱典型故障的識別,相比BP神經網絡,該方法能達到更高的準確率。湯寶平等對振動信號進行共振稀疏分解,得到高、低共振分量,構建多共振分量融合卷積神經網絡,進行了行星齒輪箱故障診斷。崔彥平等利用分段三次Hermit插值法改進LMD,提高了信號分解的精度,并與切片雙譜相結合,有效實現了齒輪箱復合故障特征的提取。程加堂等提出一種基于混沌量子粒子群優化BP神經網絡的故障診斷方法,用于風電機組齒輪箱故障的識別。從以上研究可以看出,齒輪箱故障診斷的研究重點主要集中在信號特征提取和故障識別算法兩個方面,目前應用較為廣泛的方法主要有小波變換、經驗模態分解、支持向量機、極限學習機以及神經網絡等。
本文作者提出一種基于信號混合特征的CFOA-GRNN行星齒輪箱故障診斷方法。首先,獲取信號時域特征和頻域能量特征,輸入廣義回歸神經網絡;利用混沌擾動改進的果蠅優化算法對網絡參數進行尋優,建立最優模型進行故障診斷,并通過行星齒輪箱實驗臺采集的振動信號進行應用測試。結果表明:該方法能達到比較理想的診斷效果,且相比其他故障診斷模型具有參數簡單、尋優速度快等優勢。
1 CFOA-GRNN算法概述
1.1 廣義回歸神經網絡
廣義回歸神經網絡(Generalized Regression Neural Network,GRNN),是1991年由SPECHT提出的一種基于非線性回歸理論的前饋式神經網絡模型,其結構如圖1所示,由輸入層、模式層、求和層和輸出層構成。
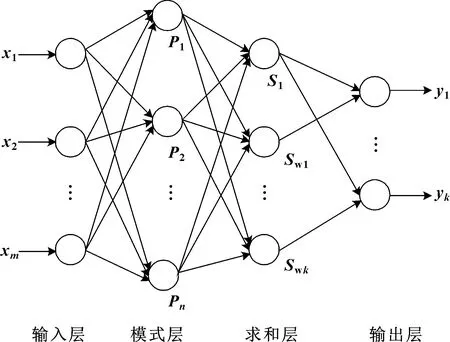
圖1 GRNN網絡結構
GRNN輸入層神經元個數等于輸入向量的維數,輸入層負責將輸入數據傳遞給中間層。模式層是徑向基層,激活函數一般為高斯函數,其神經元個數等于訓練樣本個數,每個神經元對應不同的訓練樣本。求和層分為兩種不同的神經元,一種是對模式層各神經元進行代數求和,另一種是對模式層各神經元進行加權求和。輸出層神經元個數等于輸出向量維數,將求和層中兩種神經元的輸出相除,得到網絡輸出值。與應用較廣泛的BP神經網絡相比,GRNN具有單程訓練不需要迭代、計算量小、收斂速度快等優點,而且網絡訓練過程需要人為調節的參數只有光滑因子spread,一定程度上降低了主觀因素對訓練結果的影響。
1.2 混沌果蠅優化算法
果蠅優化算法(Fruit Fly Optimization Algorithm,FOA)是由潘文超提出的一種基于果蠅種群覓食行為的全局尋優仿生算法。該算法與粒子群算法、蟻群算法等相比,具有設置參數少、收斂速度快、精度高、結構簡單等優勢。但果蠅優化算法受初值選取的影響,仍然存在易陷入局部最優解,導致收斂精度降低、收斂速度變慢的問題。
混沌擾動算法是一種全局優化方法,其原理是將待優化變量通過混沌映射規則映射到混沌變量空間的取值區間內,利用混沌變量的隨機性、遍歷性、規律性和初值敏感性迭代尋優搜索,將獲得的優化解反向映射轉化到優化空間,尋求最優解。混沌擾動通常采用Logistic映射,其方程為
(+1)=()[1-()]
(1)
式中:為迭代次數;()∈[0,1]為混沌變量;為控制參數,當=4時,系統處于混沌狀態。與待優化變量∈[,]可由下式進行往返映射;
=(-)(-)
(2)
′=+(-)
(3)
式中:′為經迭代后的混沌變量從混沌區間轉化為待優化變量區間而獲得的值。
混沌果蠅優化算法(Chaos Fruit Fly Optimization Algorithm,CFOA),即在果蠅優化算法迭代尋優過程中得到的每一代最優位置增加混沌擾動,進行二次尋優,能夠使種群跳出局部最優解,實現全局搜索。
1.3 CFOA-GRNN算法流程
GRNN隱含層神經元個數和網絡連接權值基于訓練數據,訓練過程中需要設置的參數為光滑因子spread值,spread值越大,網絡逼近過程越平滑,但誤差也越大,診斷能力降低;spread值越小,網絡逼近能力越強,但逼近過程就越不平滑,易出現過擬合,降低了網絡的泛化能力。因此,spread值的確定成為建立診斷效果優良的GRNN模型的首要任務。利用CFOA對GRNN迭代尋優,能夠在短時間內找到最優的spread值,避免主觀取值的盲目性。CFOA-GRNN算法流程如下:
(1)設置果蠅優化算法最大迭代次數Maxgen、種群規模、混沌遍歷次數,并賦予果蠅群體隨機初始位置(,);
(2)隨機賦予果蠅個體飛行方向和距離;
()=+2-
(4)
()=+2-
(5)
式中:表示飛行步長;表示(0,1)之間的隨機數;=1,2…,;
(3)計算果蠅個體位置與原點的距離()和對應的味道濃度判定值();

(6)
()=1()
(7)
(4)依次把所有果蠅個體對應的()作為光滑因子,利用訓練樣本建立GRNN診斷模型,把測試樣本數據輸入網絡進行診斷,把網絡的實際輸出與理想值的RMSE作為味道濃度函數,則最小值對應的坐標即為該代種群的最優個體位置:
[,]=min
(8)
若為第1代種群,則其他個體全部飛往該位置,更新種群坐標:
=
(9)
=
(10)
=
(11)
若為第2代及以后的種群,則將得到的與上一代比較,若<,則按照上式更新種群坐標;
(5)對得到的最優坐標增加混沌擾動,按照式(1)—式(3)的方法得到混沌優化后的坐標(′,′),再執行步驟(3)、(4)得到對應的味道濃度函數值′,并與比較,若′<,則更新種群最優坐標:
=′
(12)
=′
(13)
=′
(14)
混沌迭代遍歷次;
(6)得到新的果蠅種群坐標后,進行下一代尋優,重復執行步驟(2)—(5),直到達到最大迭代次數Maxgen,尋優結束,得到的最優坐標對應的味道濃度判定值即為GRNN模型的最優光滑因子。
2 特征提取
2.1 時域統計特征
從齒輪箱采集到的通常為時域振動信號,因此通過時域分析得到信號的時域統計特征較為直接簡便。時域統計特征分為有量綱特征和無量綱特征。有量綱特征包括峰值、均值、均方根值和方差等;無量綱特征包括峭度指標、波形指標、峰值指標、裕度指標和脈沖指標等。無量綱特征相比前者具有一定通用性,針對不同的設備,適用于同一個無量綱參數值。為保證特征參數的適用性,選用5個無量綱參數作為信號時域特征,對于離散振動信號序列,,,…,,其特征參數公式為
峭度指標:

(15)
波形指標:
(16)
峰值指標:
(17)
裕度指標:

(18)
脈沖指標:
(19)
式中:表示信號的峰值;表示信號的均值;表示信號的標準差。
2.2 頻域能量特征
小波包變換(Wavelet Packet Transform,WPT)是在小波變換基礎上發展和改進而來的一種信號時頻域分析方法,將小波變換中沒有細分的高頻段也進行分解,有效解決小波變換中高頻段分辨率較差的問題。齒輪箱正常信號和故障信號經小波包分解后,各頻帶的能量分布會有不同,因此可以選擇各頻帶的能量作為信號頻域特征。
對信號做層小波包分解,對最末層的小波系數進行重構,得到重構信號(=0,1,…,2-1),對應的頻帶能量為

(20)
式中:(=1,2,…,)表示離散值。
2.3 特征量選取
時域統計特征和頻域能量特征分別從不同角度反映了齒輪箱振動狀態。為充分利用從信號中獲取的信息,提高故障診斷的效率,將兩種特征量相結合,得到振動信號的時-頻域混合特征向量=[,,,,,0,1,…,(2-1)],將作為神經網絡的輸入。
3 應用與結果分析
3.1 振動信號采集
文中的振動信號來源于本文作者所在研究團隊搭建的電封閉行星齒輪箱故障診斷實驗臺,如圖2所示。通過向控制柜輸入命令可以設定電動機輸入轉速和發電機負載扭矩,實現齒輪箱在不同工況下的運轉。齒輪箱外殼安裝有加速度傳感器,采樣頻率為8 192 Hz,可以采集實驗臺運轉時齒輪箱的振動信號。
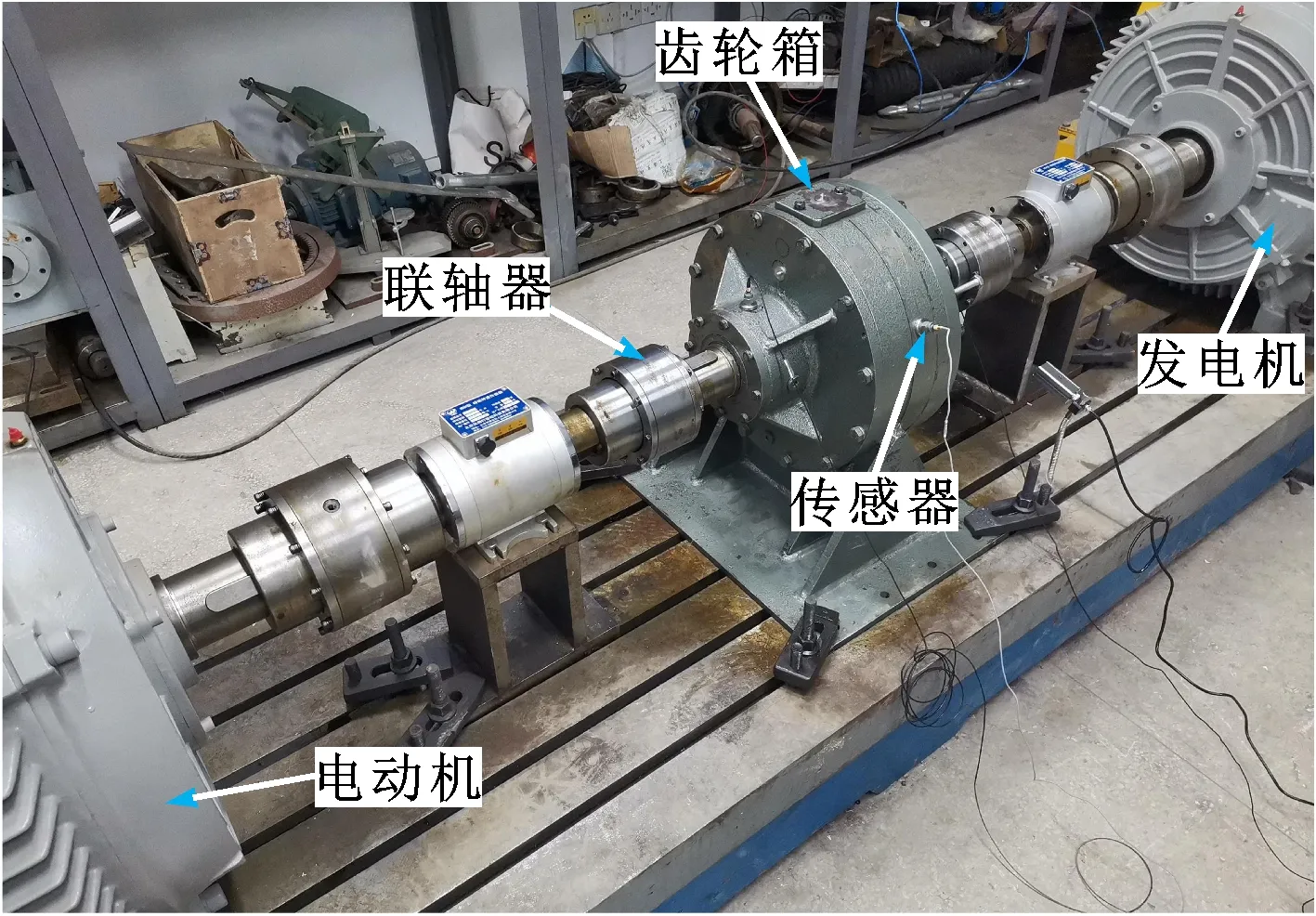
圖2 齒輪箱故障診斷實驗臺
齒輪箱內部為2K-H行星齒輪傳動系統,行星輪分為正常、斷齒故障和點蝕故障3種類型,如圖3所示。通過更換不同類型行星輪進行信號采集,可獲取齒輪箱不同狀態下的振動信號。

圖3 3種故障類型行星輪
3.2 建立CFOA-GRNN診斷模型
3.2.1 數據預處理
利用實驗臺對齒輪箱正常、斷齒故障、點蝕故障3種狀態各采集80組振動信號。為提高故障診斷模型對齒輪箱不同工況的適應性,每種狀態均采集了150、200 r/min兩種輸入轉速和100、200 N·m兩種負載扭矩對應的4種工況組合下的信號。
由于傳感器采集信號時會受到干擾,需要進行降噪處理,本文作者采用小波閾值降噪法處理信號。小波閾值降噪法首先對信號進行小波分解,因噪聲信號一般包含在高頻細節信號中,對分解后的高頻系數進行閾值量化處理,再利用低頻系數和量化處理后的高頻系數進行信號重構。利用MATLAB軟件wden函數可以實現信號的閾值降噪處理,經多次測試,選用sym8小波進行4層分解能夠達到較好的降噪效果。圖4所示為輸入轉速150 r/min、負載扭矩100 N·m工況下的斷齒故障信號降噪處理前后的時域波形。可以看出:經降噪處理后,信號中干擾成分明顯減少,有效波形更加明顯。

圖4 斷齒故障信號降噪前后對比
經降噪處理后進行信號特征量的計算。在頻域能量特征的計算中選擇sym6小波進行3層小波包分解,獲得信號8個頻帶的能量分布特征。圖5所示為3種狀態各一組數據經小波包分解后的能量占比對比,可以看出:齒輪箱不同狀態下各頻段能量分布有比較明顯的差異。
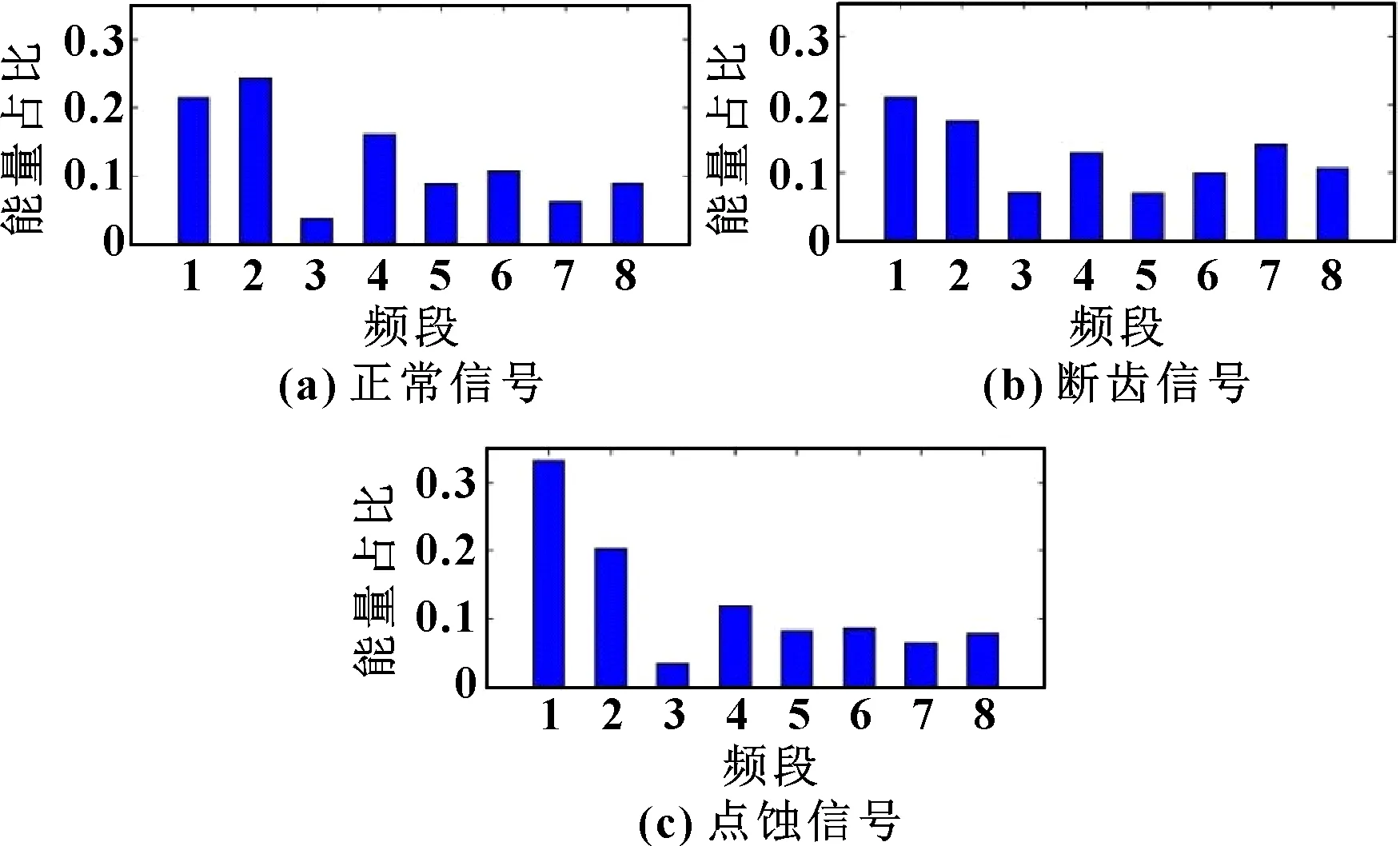
圖5 3種信號頻段能量占比
得到信號混合特征向量后,由于不同特征量具有不同的量綱,在數值上也會有較大差異,不利于神經網絡的訓練。因此,需要對特征向量進行歸一化處理,轉化為[0,1]區間內的數。數據歸一化按下式進行:
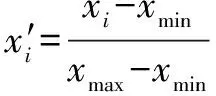
(21)
式中:′表示歸一化處理后的第個特征量;表示原始數據第個特征量;表示特征量中的最小值;表示特征量中的最大值。
3.2.2 診斷模型測試
利用交叉驗證的思想,依次從3種狀態的特征向量中隨機取20組數據作為網絡訓練樣本,其余60組作為測試樣本;利用MATLAB編寫程序,建立CFOA-GRNN故障診斷模型,進行多次樣本測試,結果如表1所示。經計算可知測試組1~4的平均診斷成功率分別為95%、97.78%、96.11%、93.33%,最優Spread值分別為0.100 6、0.076 2、0.096 0、0.099 2。
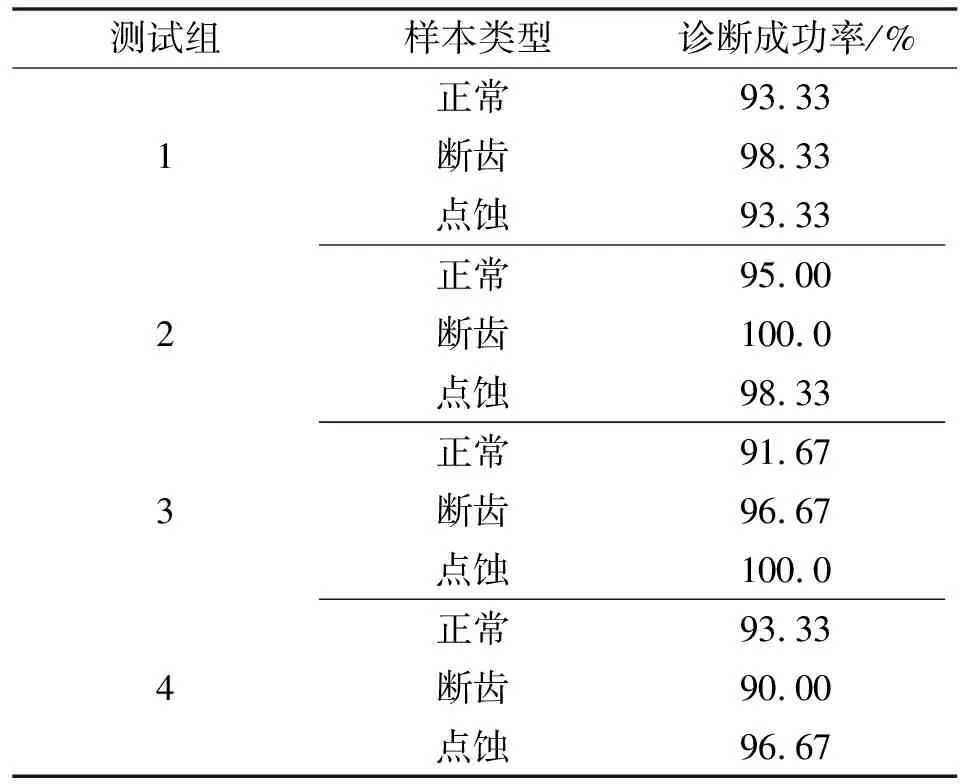
表1 診斷測試結果
表1中測試組4的網絡輸出如圖6所示,3個輸出值分別對應正常(0)、斷齒(1)、點蝕(2)3種狀態。從表1和圖6可以看出:利用所建立的CFOA-GRNN故障診斷模型對不同樣本進行診斷,成功率均達到90%以上,能夠達到較好的診斷效果。
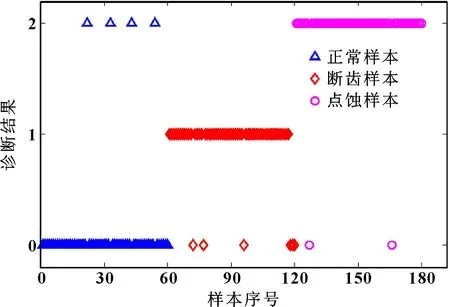
圖6 測試組4的網絡輸出
3.3 模型對比
將所提模型與未引入混沌擾動的FOA-GRNN模型進行對比。兩種模型最大迭代次數為40,果蠅種群個數設為10,步長為0.4,二者訓練過程中診斷誤差RMSE的變化趨勢如圖7所示。可以看出:FOA-GRNN經25次迭代達到最小誤差,而CFOA-GRNN在第5次迭代就可達到最小誤差,收斂速度更快。經對比可知,加入混沌擾動后的CFOA的尋優效果比傳統的FOA好。
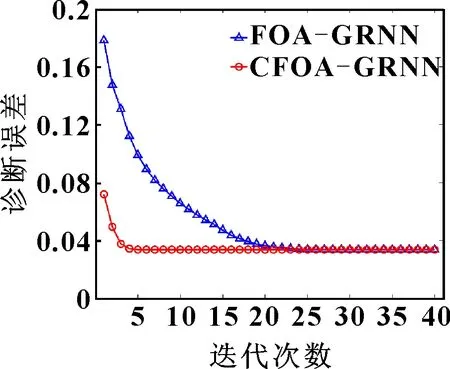
圖7 兩種模型訓練誤差對比
為進一步驗證CFOA-GRNN模型的性能,將它與BPNN、GRNN進行對比。BPNN模型隱層節點數設為10,GRNN模型預設光滑因子值為0.15。3種模型均進行4次不同樣本的測試,結果如表2所示。可以看出:3種模型中,CFOA-GRNN平均診斷成功率最高、診斷性能最好。事實上,BPNN需要人為預設的隱層神經元個數、學習率、激活函數、訓練函數等網絡參數過多,受主觀因素和初始設置影響較大,難以調試出適應不同樣本的模型;GRNN只需設置一個參數光滑因子,但預設值具有一定盲目性,也難以確定最優參數。CFOA-GRNN有效解決了前兩種模型存在的問題,能夠在短時間內建立性能優良的故障診斷模型。

表2 不同模型診斷性能對比
4 總結
本文作者提出了一種基于行星齒輪箱振動信號時域統計特征和頻域能量特征的混合特征提取方法和利用混沌果蠅優化算法尋最優參數的CFOA-GRNN故障診斷算法。通過行星齒輪箱實驗臺測得多種工況數據,對提出的方法進行應用測試,達到了比較理想的故障診斷效果。經對比不同模型發現,所提出的模型相比BPNN、GRNN、FOA-GRNN模型,具有參數設置簡便、主觀影響小、尋優速度快、診斷正確率高等優勢,在行星齒輪箱典型故障診斷中具有較好的實用性。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
