基于改進布谷鳥算法的水下多平臺陣位優(yōu)化
2022-09-09 01:45:28李鵬飛羅恒光王志欣唐立赫
無線電工程 2022年9期
李鵬飛,羅恒光,王志欣,唐立赫
(中國電子科技集團公司第五十四研究所,河北 石家莊 050081)
0 引言
海洋作為我國經濟可持續(xù)發(fā)展的戰(zhàn)略空間和國家安全不可或缺的保障,其信息技術的發(fā)展極大地提升了海洋權益的維護能力。水下無人平臺憑借強機動性、適應性優(yōu)勢逐漸成為水下各種探測設備的搭載平臺。平臺及集群極大地拓展了作戰(zhàn)能力,被視為“力量倍增器”[1]。
為了確保水下多基地信息探測體系的高效運轉、水下空間態(tài)勢信息的快速獲取,保證多基地探測系統(tǒng)對任務區(qū)域的監(jiān)測質量,Pompili等[2]提出了面向三維海洋空間覆蓋部署問題的bottom-grid算法,即在海底三角網(wǎng)格節(jié)點部署的基礎上調節(jié)節(jié)點深度。Wu等[3]為了實現(xiàn)水下三維空間的覆蓋范圍最大化,提出了一種基于Voronoi圖的節(jié)點深度調節(jié)策略。蔣鵬等[4]考慮到水域中存在的障礙物與邊界,提出了一種果蠅啟發(fā)的水下傳感器網(wǎng)部署算法,該算法以網(wǎng)絡重連通為約束條件,將果蠅群的覓食行為與歐瓊鳥飛行機制相結合,來求解節(jié)點移動位置和保持網(wǎng)絡拓撲的相對穩(wěn)定性,最后運用障礙物局部感知移動模型來避障,該算法在躲避障礙物的同時提高了網(wǎng)絡覆蓋率和連通性,減少了網(wǎng)絡能耗。張穎等[5]提出了一種基于人工勢場的分布式水下傳感器網(wǎng)絡部署優(yōu)化算法,算法假設區(qū)域中存在的覆蓋漏洞會產生對移動節(jié)點引力場,利用移動節(jié)點在人工勢場法下所受虛擬力量化來指導節(jié)點移動,進而提高網(wǎng)絡有效覆蓋率,提升網(wǎng)絡服務質量。文獻[6]根據(jù)被動聲納的概率感知模型,兼顧水下環(huán)境影響,提出了基于模糊感知模型和模糊融合模型的水下傳感器網(wǎng)絡節(jié)點部署策略來解決網(wǎng)絡二維覆蓋問題。文獻[7]提出了基于信度勢場的算法解決三維部署問題,基于D-S證據(jù)理論定義了檢測信度和信度覆蓋,對水下傳感器網(wǎng)絡監(jiān)測區(qū)域中信度覆蓋的變化做了研究,結合目標在區(qū)域中分布的先驗概率信息和被動聲納的探測概率模型,提出了節(jié)點部署算法。該算法建立了目標信度值信息與虛擬勢場中受力的聯(lián)系,依據(jù)感知節(jié)點的受力值來調節(jié)節(jié)點位置。鑒于水下環(huán)境復雜性及水下節(jié)點的成本高昂,由水下無人平臺構成的探測網(wǎng)絡不可能采用無線傳感器網(wǎng)絡大規(guī)模隨機部署的方案[8]。所以,如何用盡量少的節(jié)點實現(xiàn)目標區(qū)域有效覆蓋的最大化是國內外的研究側重點。早期關于水下探測網(wǎng)絡的研究大多基于通用且簡化的數(shù)學模型,對水下環(huán)境的涉及很少。本文基于水下平臺信息流程及平臺能力,量化地給出了多種因素聯(lián)合約束下的水下多平臺探測效能;選定優(yōu)化算法中的布谷鳥算法(Cuckoo Search Algorithm,CSA),引入高斯變異算子、模擬退火機制、更新淘汰率來改進優(yōu)化算法的效率與精度,用改進算法對區(qū)域內多平臺陣位進行了優(yōu)化。
1 協(xié)同探測效能
多基地系統(tǒng)是以雙基地系統(tǒng)為基本單元混合而成的網(wǎng)絡形式,其立體模型如圖1所示。

圖1 雙基地系統(tǒng)探測立體模型Fig.1 Detection stereo model of bistatic system
圖1中,HS為發(fā)射臺深度,HT為目標深度,HR為接收臺深度,HB為海深,LST為發(fā)射平臺與目標的水平間距,LTR為目標與接收平臺的水平間距,LSR為發(fā)射與接收平臺的水平間距。
根據(jù)圖1,探測具體實現(xiàn)過程如下:
步驟1:確定系統(tǒng)工作頻率、帶寬、聲源級、收發(fā)端指向性指數(shù)和深度等參數(shù);
步驟2:輸入海洋環(huán)境參數(shù),生成海洋環(huán)境信息;
步驟3:目標信息輸入,如目標深度等;
步驟4:計算信號從發(fā)射端到目標以及目標散射、反射到接收端的傳播衰減;
步驟5:求取聲線入射角與收發(fā)之間的分置角,結合目標強度模型計算目標強度;
步驟6:選擇以環(huán)境噪聲為背景的聲納方程計算海洋環(huán)境噪聲;
步驟7:計算信噪比,結合信噪比與探測概率的關系得到探測概率。
探測概率取決于信噪比和檢測閾[9],即:
Pd(X,Y)=e-DT/(1+SNR(X,Y)),
(1)
式中,信噪比由信號余量SE和檢測閾DT相加得到。進行聲納設計,信號余量取值為0時,對應探測概率為0.5,虛警概率為10-4[10]。
以海洋環(huán)境噪聲為主要干擾的雙基地聲納方程為:
SL-TLST-TLTR+TS-NL+DI=DT,
(2)
式中,SL為聲源級;TLST,TLTR為傳播損失;TS為目標強度;NL為海洋環(huán)境噪聲級;DI為接收指向性指數(shù);DT為檢測閾。
1.1 傳播損失計算
擴展損失、吸收損失和散射構成了聲波傳播過程中主要的衰減。傳播損失僅考慮波陣面擴展損失和介質聲吸收損失,即:
TL=TL1+TL2。
(3)
由傳播損失定義的球面波的傳播損失為:
(4)
對于海水介質聲吸收引起的傳播損失計算方法如下:
TL2=r·a(dB),
(5)
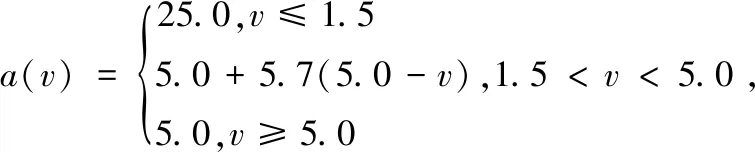
式中,r為聲波傳播距離,單位km;α為海水聲吸收系數(shù),單位dB/km,具體表達式為:
(6)
式中,f為聲信號頻率,單位kHz。快速計算傳播模型下,傳播途中任意距離處的傳播損失可以快速得出。
1.2 目標強度計算
目標強度(TS)是聲納主動信息流程中特有的參數(shù),描述了水下目標對探測聲波的反射能力。TS的表達式如下:
(7)
式中,Ir|r=1為入射聲波相反方向上、離目標聲中心1 m處的回波聲強;Ii為目標處的入射聲。文獻[11]給出了水下目標高逼真金屬模型下不同入射角和分置角組合下的目標強度,如表1所示。
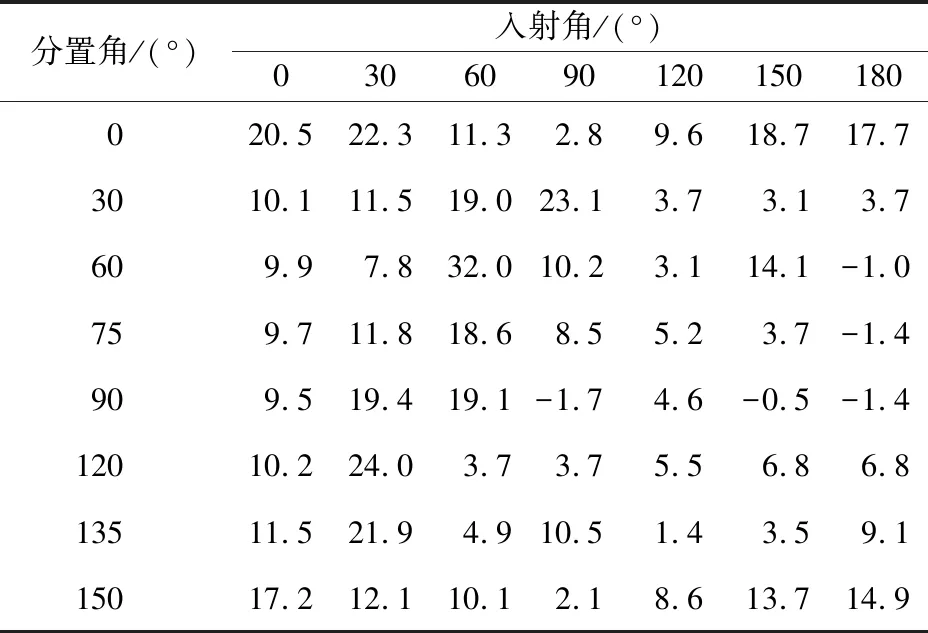
表1 不同入射角與分置角組合下的目標強度
1.3 環(huán)境噪聲計算
1.3.1 風成噪聲
APL-UW給出了風成噪聲(10~1 000 kHz)頻段合適的參數(shù)化模型[12]:
42.2+22.4lgv-15.9lgf-δ(ΔT),
(8)
(9)
式中,v為風速,且要求v≥1 m/s;f為噪聲頻率,單位kHz;ΔT為溫度差,單位K;有:
ΔT=Tair-Twater。
(10)
Kuperman和Ferla根據(jù)測量結果并模仿APL模型,得到了400 Hz以下用于估計低頻段風成噪聲的公式[13]:
(11)
結合式(8)和式(11),得到2個模型之間的過渡噪聲[14]:
41.2+22.4lgv-10lg(1.5+f1.59)-δ。
(12)
1.3.2 雨噪聲
在APL模型中,20 kHz處的噪聲譜級可以表示為:
(13)
式中,R為降雨量,單位mm/h;v為風速,單位m/s。風速v通過a和b來體現(xiàn)對噪聲級的影響:
(14)

(15)
APL模型基于20 kHz頻點處的雨噪聲級在1~100 kHz頻段的雨噪聲譜級:
(16)
1.3.3 遠處航船噪聲
低頻條件下的單極子聲源個體的輻射聲場都會與其在海面處反射的波相干涉,從而構成一個偶極子。所以將遠處船群建模為一片偶極子的方法可行,得到偶極子的噪聲級為:
(17)

(18)
海洋環(huán)境總噪聲是多種來源噪聲的綜合效果,通常通過“功率求和”的方式得到總的噪聲級:
NL=10lg(10NLwind+10NLrain) 。
(19)
2 改進布谷鳥算法
2.1 基本布谷鳥算法
CSA因參數(shù)少、收斂快、全局搜索能力強、算法操作簡單和易于實現(xiàn)被廣泛地應用于多目標優(yōu)化、工程設計、微電網(wǎng)優(yōu)化以及計算機網(wǎng)絡等領域[16]。
自然界中的布谷鳥用寄生的方式繁衍后代,將卵產在其他鳥巢中,由其他鳥來養(yǎng)育自己的下一代。一旦宿主鳥發(fā)現(xiàn)外來鳥蛋時,宿主鳥就會拋棄外來鳥蛋。Yang和Deb為了模擬布谷鳥在尋窩過程中的行為,設定以下3個理想狀態(tài):
① 布谷鳥一次產一個卵,隨機選擇鳥巢來孵化;
② 符合條件的被寄生鳥巢保留至下一代;
③ 寄生鳥巢數(shù)目固定,且鳥蛋被寄主發(fā)現(xiàn)的概率為Pc。
基于以上理想狀態(tài),鳥巢位置的更新公式為:
(20)

L(λ)~u=t-λ,1≤λ≤3。
(21)

算法具體流程如下:
步驟1:隨機產生作為初始化種群的n個鳥巢位置;
步驟2:計算適應度,找出并保留最好的鳥巢位置;
步驟3:萊維飛行更新鳥巢位置;
步驟4:計算新位置的適應度,并同原鳥巢的適應度對比,擇優(yōu)保留;
步驟5:將Pc與代表外來鳥蛋被發(fā)現(xiàn)概率的隨機數(shù)作比較,若Pc較大,則重新隨機生成一個新鳥巢位置并計算適應度;
步驟6:若滿足終止條件,輸出最好的鳥巢位置,否則回到步驟3。
2.2 改進布谷鳥算法
CSA的尋優(yōu)效率受限于萊維飛行的搜索策略,萊維搜索步長和方向的隨機性很大,前期搜索快,后期收斂速度慢,求解精度低,易陷入局部最優(yōu)[18]。為了提高算法求解效率和精度,本文引入高斯變異算子、更新淘汰率和模擬退火機制,對CSA進行改進。
高斯變異算子:在位置更新時加入變異操作,以較高概率在小鄰域內產生一個正態(tài)分布的隨機數(shù)對個體產生干擾形成變異。每個染色體個體解的目標變量為X,變異標準差為σ。染色體包含目標變量X和標準差σ兩部分,形式如下:
X(t+1)=X(t)+N(0,σ)。
(22)
X和σ之間的關系為:
(23)
(24)
式中,系數(shù)β,γ是待定參數(shù),β通常取1,γ取0;F(X(t))為當前個體的適應度;P(σ)為N(0,σ)的概率密度。
更新淘汰率:隨著迭代次數(shù)的增加,算法計算的結果會在最優(yōu)解附近擺動,不會精確收斂。利用梯度下降思想改進淘汰概率[19],其隨迭代次數(shù)變化如下:
Pc=0.9iterationPc0,
(25)
式中,iteration為迭代次數(shù);Pc0為初始淘汰概率。
模擬退火機制:將問題的求解過程轉化為退火過程。控制參數(shù)T表示退火過程中的溫度,T每取一個值,算法按Metropolis接受準則,往復進行“新解產生—判斷—接受或舍棄”的循環(huán)而達到平衡。算法憑借不強求新解優(yōu)于當前解的思想提升跳出局部極值的能力。
Metropolis接受準則如下:
(26)
式中,ΔE為前后狀態(tài)系統(tǒng)能量差;P(ΔE)為接受新解的概率;k為常數(shù);T為當前的絕對溫度。
改進CSA詳細流程如圖2所示,步驟如下:
步驟1:隨機產生作為初始化種群的n個鳥巢位置;
步驟2:計算適應度,找出并保留最好的鳥巢位置;
步驟3:萊維飛行更新鳥巢位置;
步驟4:高斯變異更新鳥巢位置;
步驟5:計算新位置的適應度,并同原鳥巢的適應度對比,若新解優(yōu)于當前最優(yōu)解,用新解作為當前最優(yōu)解;若新解適應度較當前最優(yōu)解的適應度差,按淘汰率和Metropolis接受準則決定新解的取舍;
步驟6:若滿足終止條件,輸出最好的鳥巢位置,否則回到步驟3。
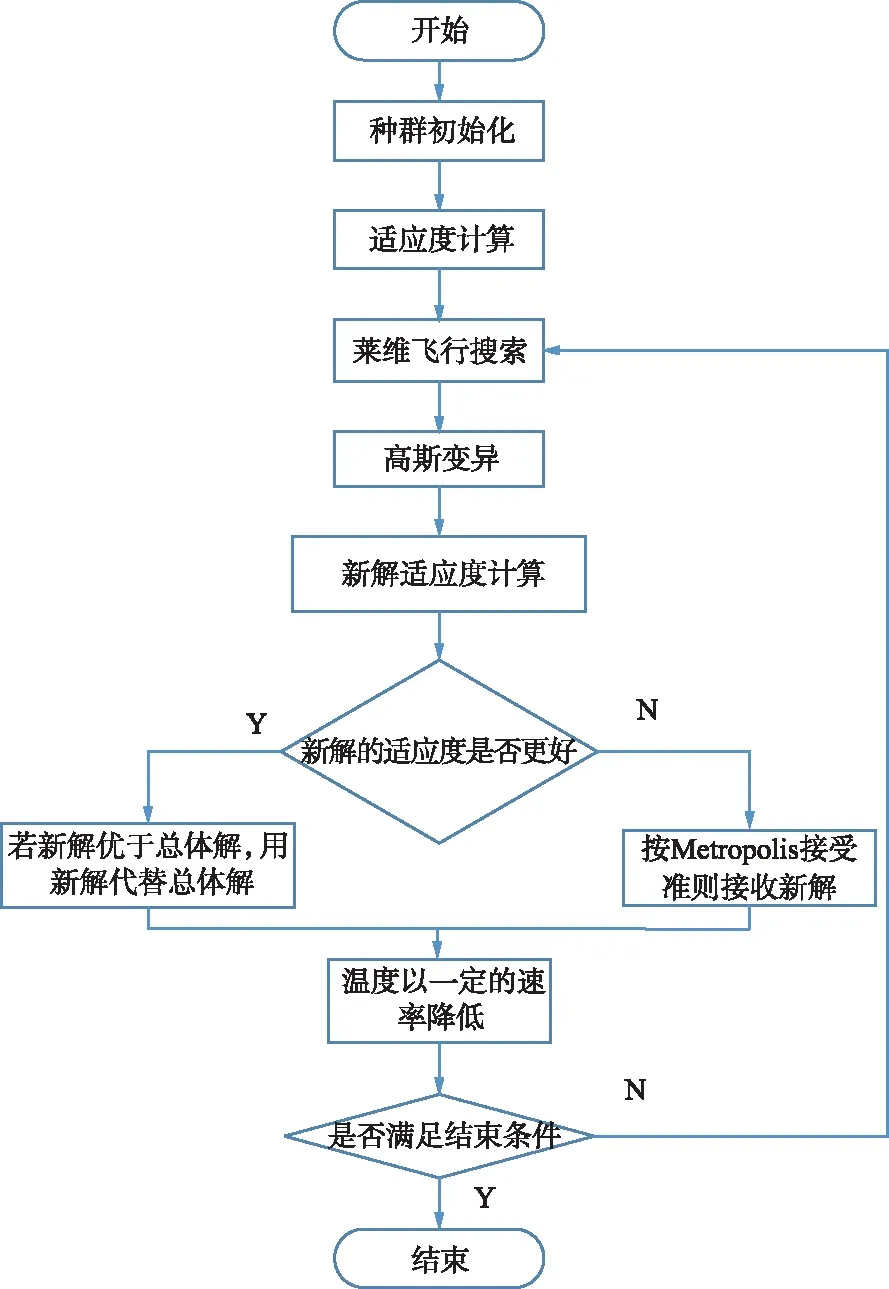
圖2 改進布谷鳥算法流程Fig.2 Improved CSA flow
3 多平臺陣位優(yōu)化
水下監(jiān)測網(wǎng)絡任務區(qū)域覆蓋質量直接關系到網(wǎng)絡的整體效能,通過合理部署平臺位置,用較少的平臺數(shù)目達到較高的區(qū)域有效探測覆蓋率,將覆蓋盲區(qū)和重疊區(qū)降到最低。多種可供選擇的裝備平臺構成的區(qū)域水下探測系統(tǒng)創(chuàng)生出新的優(yōu)化配置原則。基本原則如下:
① 節(jié)點最少原則。給定任務區(qū)域,給定有效覆蓋面積占比要求,優(yōu)化平臺位置,最大程度減少冗余平臺。
② 區(qū)域有效覆蓋面積最大原則。給定任務區(qū)域,給定平臺數(shù)量,優(yōu)化平臺陣位使區(qū)域有效覆蓋面積最大。
③ 探測概率最大原則。給定任務區(qū)域,布放平臺監(jiān)測到任意方向闖入的目標,使目標在該區(qū)域以任意航跡穿過時被發(fā)現(xiàn)的概率最大。
本文以平臺的區(qū)域有效探測覆蓋率為適應度值,通過改進CSA對多個平臺的陣位信息進行優(yōu)化來提高區(qū)域的探測覆蓋率。
4 仿真結果及分析
實驗設置種群數(shù)為10,每個種群含有的個體數(shù)目為平臺數(shù)目的2倍,Pc0=0.25,初始溫度為100 K,結束溫度為0.01 K,溫度衰減系數(shù)為0.99,迭代次數(shù)200。
海況信息:任務區(qū)域大小為22 km×22 km,區(qū)域步長0.1 km,區(qū)域平均聲速1 450 m/s,海深4 500 m,海底底質為沙質,聲速1 600 m/s,海平面上下溫差5 K,海面風速5 m/s,降雨量2.5 mm/h,航運密度1.3 船/平方海里,假設目標各向同性且強度為16 dB,目標深度100 m,目標靜止,航向0°。
發(fā)射平臺、接收平臺相關參數(shù)信息如表2所示。

表2 平臺工作參數(shù)
本文用改進CSA對1個發(fā)射平臺和3個接收平臺組合、1個發(fā)射平臺和4個接收平臺組合、2個發(fā)射平臺和3個接收平臺組合進行了陣位優(yōu)化仿真,對應的優(yōu)化后陣位示意圖和對應的覆蓋率進化曲線如圖3~圖8所示。
用改進CSA對陣位進行優(yōu)化,由圖4可以看出,一發(fā)三收工作模式下區(qū)域有效探測覆蓋率由52%提高到63%,覆蓋率在60次時達到收斂。由圖6可以看出,一發(fā)四收工作模式下區(qū)域有效探測覆蓋率由72%提高到84%,覆蓋率在80次時達到收斂,兩發(fā)三收工作模式下區(qū)域有效覆蓋率由84%提高到98%,覆蓋率在120次時達到收斂。由圖3、圖5和圖7可以看出,改進CSA對一發(fā)多收、多發(fā)多收工作模式下的平臺有很好的部署優(yōu)化效果。
圖3 一發(fā)三收模式下平臺的優(yōu)化陣位示意Fig.3 Schematic diagram of optimized array of platform in one-transmitter three-receiver mode

圖4 一發(fā)三收模式下覆蓋率進化曲線Fig.4 Evolution curve of coverage rate in one-transmitter three-receiver mode
圖5 一發(fā)四收模式下平臺的優(yōu)化陣位示意Fig.5 Schematic diagram of optimized array of platform in one-transmitter four-receiver mode
圖6 一發(fā)四收模式下覆蓋率進化曲線Fig.6 Evolution curve of coverage rate in one-transmitter four-receiver mode
圖7 兩發(fā)三收模式下平臺的陣位優(yōu)化Fig.7 Schematic diagram of optimized array of platform in two-transmitter three-receiver mode

圖8 兩發(fā)三收模式下覆蓋率進化曲線Fig.8 Evolution curve of coverage rate in two-transmitter three-receiver mode
5 結束語
本文給出了水下無人平臺協(xié)同探測效能模型,應用CSA優(yōu)化平臺陣位,使多個水下無人平臺效能發(fā)揮最大化;針對CSA易陷入局部最優(yōu)的問題,引入高斯變異算子、更新淘汰率和模擬退火機制,對CSA做了改進;對基于區(qū)域最大覆蓋面積原則的多平臺進行部署優(yōu)化,用改進CSA對區(qū)域內一發(fā)多收、多發(fā)多收不同工作模式下的多平臺陣位進行優(yōu)化,區(qū)域有效探測覆蓋率較隨機部署顯著提高。
考慮到工程應用及實際海洋環(huán)境的時變性,接下來將進一步研究實際海洋環(huán)境耦合作用下的平臺探測效能,對算法繼續(xù)優(yōu)化,便于算法后續(xù)移植到具體的設備上。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
今日農業(yè)(2021年9期)2021-11-26 07:41:24
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
發(fā)明與創(chuàng)新·小學生(2021年3期)2021-03-25 11:48:49
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52