小衛(wèi)星集群系統(tǒng)任務(wù)規(guī)劃與控制方法*
2022-09-09 01:50:18左小玉陳天冀
航天控制 2022年4期
白 雪 左小玉 陳天冀 徐 明
1. 北京航空航天大學(xué) 宇航學(xué)院, 北京 100191 2. 北京航空航天大學(xué) 未來(lái)空天技術(shù)學(xué)院/高等理工學(xué)院, 北京 100191
0 引言
近年來(lái),現(xiàn)代小衛(wèi)星優(yōu)勢(shì)在國(guó)內(nèi)外空間探測(cè)任務(wù)中體現(xiàn)的越來(lái)越明顯。小衛(wèi)星具有成本低、研制開發(fā)周期短、應(yīng)用前沿技術(shù)、可靠性高的特點(diǎn),成千上萬(wàn)的小衛(wèi)星可構(gòu)成集群,通過(guò)群體行為共同實(shí)現(xiàn)空間任務(wù)[1-3]。
自然界中常見的群體行為通過(guò)具有自主行為能力的個(gè)體相互配合,共同合作完成任務(wù),呈現(xiàn)集體自組織性和有序協(xié)同性[4]。對(duì)于復(fù)雜的空天任務(wù),傳統(tǒng)的航天器星座、編隊(duì)等空間構(gòu)型已無(wú)法滿足對(duì)于自主任務(wù)、分布協(xié)同和系統(tǒng)進(jìn)化的需求,因此利用飛行器的集群行為,借助集群感知、智能決策、協(xié)同控制等技術(shù),代替大衛(wèi)星進(jìn)行空間任務(wù),極大地?cái)U(kuò)展了衛(wèi)星的探測(cè)區(qū)間或偵察范圍,使小衛(wèi)星集群協(xié)同任務(wù)模式發(fā)揮更大效能。針對(duì)目標(biāo)檢測(cè)任務(wù),小衛(wèi)星集群可以實(shí)現(xiàn)多點(diǎn)分時(shí)的多重覆蓋。小衛(wèi)星集群采用分布式軌道轉(zhuǎn)移控制,任務(wù)群族相鄰小衛(wèi)星直接通信,可以減少信息量,降低計(jì)算機(jī)和通信的要求,易于實(shí)現(xiàn)[5-7]。不同于傳統(tǒng)編隊(duì)飛行具有繞飛中心且關(guān)注成員個(gè)體的位形分布,大量小衛(wèi)星組成的集群系統(tǒng)不再具有成員間明顯的隸屬關(guān)系,關(guān)注整體分布,傳統(tǒng)主從式航天器控制方法已不再適用[8],需要對(duì)空間集群整體任務(wù)規(guī)劃模式與智能協(xié)同控制進(jìn)行研究。
目前已有多個(gè)國(guó)家的相關(guān)機(jī)構(gòu)開展了航天器集群的研究工作。美國(guó)國(guó)家航空航天局(NASA)提出一種探測(cè)小行星帶的衛(wèi)星集群系統(tǒng)(ANTS),利用1000顆小衛(wèi)星組成的星群,完成小行星帶探測(cè),其中群衛(wèi)星系統(tǒng)被劃分為不同等級(jí),搭載不同載荷,利用群智能技術(shù)實(shí)現(xiàn)信息交互[9]。美國(guó)國(guó)防先進(jìn)研究計(jì)劃局(DARPA)提出一種將航天器以組為任務(wù)基本單位,利用無(wú)線通信技術(shù),代替單個(gè)大型航天器進(jìn)行空間任務(wù)的方案(F6系統(tǒng))。該方案以信息交互為紐帶,靈活處理星間信息,實(shí)現(xiàn)傳統(tǒng)單一衛(wèi)星上各子系統(tǒng)的相應(yīng)功能,并驗(yàn)證了衛(wèi)星集群相比單個(gè)大衛(wèi)星具有更廣泛的適應(yīng)能力且大大降低成本[10]。英國(guó)格拉斯哥大學(xué)提出一種利用航天器集群組成“天基鏡群”的方案,主要依靠安裝在集群表面的鏡面將太陽(yáng)光反射到小行星表面,從而使小天體受熱產(chǎn)生推力改變軌道。結(jié)合全球定位系統(tǒng)和星載自主導(dǎo)航系統(tǒng),此方案還可以精確確定小行星變軌時(shí)間[11]。
可以想像,未來(lái)外太空任務(wù)將以運(yùn)行在近地軌道上的巨量小衛(wèi)星星群形式進(jìn)行空間任務(wù)規(guī)劃與探測(cè),由此帶來(lái)的應(yīng)用效益遠(yuǎn)大于若干顆大衛(wèi)星帶來(lái)的影響。因此本論文關(guān)注小衛(wèi)星大規(guī)模星群,對(duì)空間集群任務(wù)規(guī)劃模式進(jìn)行研究,引入集群智能協(xié)同與規(guī)劃,實(shí)現(xiàn)智能指揮與訓(xùn)練決策,進(jìn)行系統(tǒng)整體自主協(xié)同控制,為我國(guó)未來(lái)開展小衛(wèi)星大規(guī)模集群設(shè)計(jì)與任務(wù)規(guī)劃提供必要的理論基礎(chǔ)和技術(shù)支撐。
1 小衛(wèi)星集群任務(wù)規(guī)劃模式與流程
小衛(wèi)星集群任務(wù)規(guī)劃通過(guò)從底向上、總分總的系統(tǒng),發(fā)揮分布式特點(diǎn),實(shí)現(xiàn)對(duì)空間目標(biāo)的特定任務(wù)。本文將小衛(wèi)星集群系統(tǒng)分為作為空中軌道基地的“空間基地”和其上所攜帶的大規(guī)模小衛(wèi)星星群兩部分。其中,“空間基地”部署在近地軌道上,具備較強(qiáng)的變軌能力,為小衛(wèi)星星群提供支援與承載、燃料補(bǔ)給、資源保障等功能,并進(jìn)行環(huán)境感知和態(tài)勢(shì)評(píng)估等職責(zé);小衛(wèi)星構(gòu)成任務(wù)星星群小組,小組內(nèi)包含多顆任務(wù)星與一顆指揮星,由“空間基地”在目標(biāo)附近指定位置釋放,具體執(zhí)行任務(wù)指令,一次任務(wù)可根據(jù)需求和任務(wù)評(píng)估釋放多個(gè)星群小組。星群可以依托“空間基地”根據(jù)不同需求,進(jìn)行任務(wù)構(gòu)型的快速解算與相應(yīng)種類有效載荷的高效裝配,從而進(jìn)行協(xié)同自組織管理運(yùn)行,實(shí)現(xiàn)單一航天器無(wú)法完成的復(fù)雜任務(wù)。執(zhí)行任務(wù)指令期間,“空間基地”通過(guò)對(duì)空間環(huán)境的感知,利用智能指揮與決策,執(zhí)行自主任務(wù)規(guī)劃的運(yùn)行機(jī)制,明確任務(wù)星星群任務(wù)模式與規(guī)模,并根據(jù)任務(wù)評(píng)估結(jié)果進(jìn)行多輪次任務(wù)部署。
本文中小衛(wèi)星集群能夠?qū)崿F(xiàn)的任務(wù)模式包括:目標(biāo)探測(cè)、動(dòng)能攔截和空間非合作目標(biāo)交會(huì)。1)目標(biāo)探測(cè):任務(wù)星裝載紅外探測(cè)系統(tǒng)和可見光視頻裝置等,當(dāng)目標(biāo)航天器到達(dá)任務(wù)范圍時(shí),任務(wù)星開啟星上探測(cè)設(shè)備,從多個(gè)角度方位獲取目標(biāo)相對(duì)位置、姿態(tài)、工作狀態(tài)等信息;2)動(dòng)能攔截:以任務(wù)星自身作為整體直接碰撞目標(biāo),打擊效果顯著,通常情況下,目標(biāo)難以在短時(shí)間內(nèi)采取有效的對(duì)抗或防范措施,并且動(dòng)能攔截方式部署靈活,魯棒性高,生存能力強(qiáng),技術(shù)相對(duì)簡(jiǎn)單;3)非合作目標(biāo)交會(huì):通過(guò)任務(wù)星靠近目標(biāo)之后利用自身攜帶的仿生吸附裝置與非合作目標(biāo)進(jìn)行交會(huì)對(duì)接,實(shí)現(xiàn)在軌衛(wèi)星故障修復(fù)等功能。無(wú)論何種任務(wù)模式或場(chǎng)景,都需要航天器集群內(nèi)部分工協(xié)作,實(shí)現(xiàn)探測(cè),識(shí)別,追蹤,導(dǎo)航等功能,對(duì)集群衛(wèi)星間通信、信息交互和自主決策能力都提出了較高要求。
空間小衛(wèi)星集群流程中任務(wù)模式采用并行策略,即由任務(wù)需求自主決策確定星群任務(wù)模式和星群規(guī)模,可采取單一模式,亦可采取多種模式按時(shí)間先后或同時(shí)完成指定任務(wù)。
2 集群系統(tǒng)智能指揮與決策
2.1 基于多Agent系統(tǒng)的集群智能指揮與決策
小衛(wèi)星集群智能指揮與決策主要基于多個(gè)Agent系統(tǒng),從底向上實(shí)現(xiàn)Agent間的協(xié)同和相互操作,包括協(xié)調(diào)知識(shí)、目標(biāo)、意圖和規(guī)劃等智能行為[12]。利用多個(gè)Agent間的通信構(gòu)建一個(gè)垂Agent體系統(tǒng),不僅能夠克服單個(gè)Agent的局限性,而且交互通信可以確保所有Agent獲得關(guān)鍵信息,彼此相互依存和相互組織的關(guān)系能使該系統(tǒng)靈活地求解復(fù)雜問題。
基于多Agent系統(tǒng)的小衛(wèi)星集群智能指揮與決策總體框架,分為兩層結(jié)構(gòu):上層為決策層,位于“空間基地”,主要功能為環(huán)境感知和態(tài)勢(shì)評(píng)估,并根據(jù)結(jié)果進(jìn)行星群動(dòng)態(tài)協(xié)同任務(wù)規(guī)劃,選擇任務(wù)模式和集群規(guī)模。下層為執(zhí)行層,由多個(gè)小衛(wèi)星個(gè)體組成星群小組,主要負(fù)責(zé)解算執(zhí)行任務(wù)時(shí)的小組構(gòu)型和軌道轉(zhuǎn)移策略,并保持個(gè)體之間的信息交互。
集群系統(tǒng)智能指揮與決策主要是根據(jù)態(tài)勢(shì)評(píng)估函數(shù)、目標(biāo)屬性、目標(biāo)和“空間基地”的狀態(tài)、上一輪任務(wù)效果進(jìn)行星群動(dòng)態(tài)協(xié)同任務(wù)規(guī)劃,確定新一輪任務(wù)指令,包括是否進(jìn)行下一星群小組的釋放、星群小組任務(wù)模式和規(guī)模。下達(dá)任務(wù)執(zhí)行指令后,地面站獲取到目標(biāo)星的狀態(tài)和類型并傳送給“空間基地”,“空間基地”需要根據(jù)總體任務(wù)需求、目標(biāo)星的類型(遙感、通信、攔截等)、自身狀態(tài)、目標(biāo)狀態(tài)進(jìn)行決策,確定每個(gè)星群小組任務(wù)模式與每組衛(wèi)星數(shù)量。當(dāng)前一組結(jié)束任務(wù)后,根據(jù)指揮星傳遞回來(lái)的任務(wù)評(píng)估結(jié)果,確定下一星群小組的模式與數(shù)量。重復(fù)以上過(guò)程直至完成總體任務(wù)要求。流程圖如圖1所示。
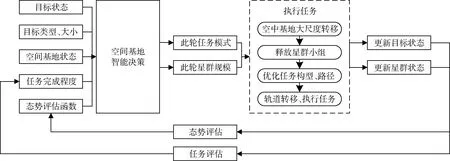
圖1 小衛(wèi)星集群指揮與決策流程圖
不同的目標(biāo)類型決定了任務(wù)模式的先后順序。而且不同的任務(wù)模式,后期姿態(tài)調(diào)整與任務(wù)評(píng)估也不盡相同。表1給出不同目標(biāo)對(duì)任務(wù)規(guī)劃的不同標(biāo)準(zhǔn)及需求。此外,目標(biāo)星的大小也將影響集群任務(wù)規(guī)劃中星群小組的規(guī)模。

表1 不同目標(biāo)的標(biāo)準(zhǔn)及需求
2.2 環(huán)境感知和態(tài)勢(shì)評(píng)估方法
態(tài)勢(shì)評(píng)估主要是基于航天器感知的目標(biāo)、集群和環(huán)境信息,評(píng)估當(dāng)前集群所處態(tài)勢(shì)優(yōu)劣并預(yù)測(cè)相應(yīng)的態(tài)勢(shì)發(fā)展。這是集群決策系統(tǒng)的核心,對(duì)星群小組內(nèi)單個(gè)衛(wèi)星的配置、規(guī)模、類型分配及性能發(fā)揮有重要影響。態(tài)勢(shì)評(píng)估本質(zhì)是建立從感知航天器態(tài)勢(shì)信息(包括目標(biāo)狀態(tài)、類型、大小,集群狀態(tài),“空間基地”狀態(tài)等)到態(tài)勢(shì)值的復(fù)雜映射關(guān)系。可以將態(tài)勢(shì)評(píng)估函數(shù)分為角度優(yōu)勢(shì)函數(shù)、速度優(yōu)勢(shì)函數(shù)、軌道高度優(yōu)勢(shì)函數(shù)、距離優(yōu)勢(shì)函數(shù)以及效能優(yōu)勢(shì)函數(shù),之后根據(jù)集群系統(tǒng)性能確定的固有判斷條件,以具體數(shù)值的方式給出態(tài)勢(shì)評(píng)估確定結(jié)果[13-14]。
基本的態(tài)勢(shì)評(píng)估函數(shù)包括:
1)角度優(yōu)勢(shì)函數(shù)
對(duì)于目標(biāo)探測(cè)任務(wù)模式,設(shè)計(jì)角度優(yōu)勢(shì)函數(shù)κA為:
(1)
其中任務(wù)星相對(duì)于目標(biāo)的方位角為φr,星群個(gè)體搭載的雷達(dá)最大搜索方位角為φR,激光探測(cè)最大擺角為φM,不可逃逸圓錐角為φK。對(duì)于動(dòng)能攔截和目標(biāo)交會(huì)模式,無(wú)需考慮角度優(yōu)勢(shì)函數(shù),默認(rèn)κA=1。
2)速度優(yōu)勢(shì)函數(shù)
對(duì)于動(dòng)能攔截模式,相對(duì)速度差越大,效果越好,設(shè)計(jì)速度優(yōu)勢(shì)函數(shù)κV為:
(2)
其中Vrm為動(dòng)能攔截最佳速度,Vr為任務(wù)星和目標(biāo)衛(wèi)星速度差。
對(duì)于目標(biāo)探測(cè)和交會(huì),相對(duì)速度差接近于0,任務(wù)效果最好,設(shè)計(jì)速度優(yōu)勢(shì)函數(shù)為:
(3)
3)軌道高度優(yōu)勢(shì)函數(shù)
由于星群小組中的指揮星負(fù)責(zé)感知局部態(tài)勢(shì),并進(jìn)行決策指揮,因此其相對(duì)于目標(biāo)衛(wèi)星的軌道高度將決定星群小組任務(wù)的優(yōu)勢(shì)程度。設(shè)計(jì)高度優(yōu)勢(shì)函數(shù)κH為:
(4)
其中hrm為任務(wù)最佳軌道高度,hr為指揮星的運(yùn)行高度。
4)距離優(yōu)勢(shì)函數(shù)
對(duì)于目標(biāo)探測(cè),設(shè)計(jì)距離優(yōu)勢(shì)函數(shù)κD為:
(5)
其中任務(wù)星相對(duì)于目標(biāo)的距離為dr,星群個(gè)體搭載的雷達(dá)最大搜索距離為dR,所攜帶激光測(cè)距儀的最大識(shí)別距離為dM,激光最小不可逃逸距離為dKmin,最大不可逃逸距離為dKmax。
對(duì)于動(dòng)能攔截和目標(biāo)交會(huì)模式,設(shè)drm為任務(wù)最佳距離,設(shè)計(jì)距離優(yōu)勢(shì)函數(shù)κD為:
(6)
5)效能優(yōu)勢(shì)函數(shù)
集群的效能函數(shù)由衛(wèi)星及星上載荷的性能決定,不需進(jìn)行估計(jì)與優(yōu)化,κE表示效能優(yōu)勢(shì)函數(shù)。當(dāng)星群小組滿足任務(wù)條件時(shí),κE=1,否則為0。
6)整體態(tài)勢(shì)評(píng)估函數(shù)
整體態(tài)勢(shì)評(píng)估函數(shù)為均衡不同優(yōu)勢(shì)函數(shù)κA,κV,κH,κD,κE之間的量級(jí)和取值范圍的不同,使各個(gè)態(tài)勢(shì)值均保持在合理的有限范圍,避免態(tài)勢(shì)值差異過(guò)大而影響整體評(píng)估效果,采用帶權(quán)重的Sigmoid函數(shù)描述。將κA,κV,κH,κD,κE作為Sigmoid函數(shù)的自變量輸入,可得到參數(shù)可調(diào)的整體態(tài)勢(shì)評(píng)估函數(shù)T:
(7)
其中,ωk,βk,k=1, 2, 3, 4, 5為優(yōu)化權(quán)重參數(shù)。
3 集群系統(tǒng)構(gòu)型優(yōu)化與軌道轉(zhuǎn)移
集群系統(tǒng)任務(wù)星星群小組執(zhí)行任務(wù)時(shí),需要進(jìn)行構(gòu)型優(yōu)化和相應(yīng)的軌道轉(zhuǎn)移與重構(gòu)。轉(zhuǎn)移過(guò)程中,“空間基地”進(jìn)行大尺度轉(zhuǎn)移迅速接近目標(biāo),之后星群小組中指揮星通過(guò)脈沖轉(zhuǎn)移軌道,任務(wù)星則通過(guò)連續(xù)有限推力變軌實(shí)現(xiàn)任務(wù)構(gòu)型建立。連續(xù)有限推力轉(zhuǎn)移基于相對(duì)運(yùn)動(dòng)模型實(shí)現(xiàn),其目標(biāo)構(gòu)型通過(guò)優(yōu)化算法得到,轉(zhuǎn)移路徑及轉(zhuǎn)移過(guò)程中加速度的設(shè)置通過(guò)一種基于Jordan分解的連續(xù)推力控制重構(gòu)策略計(jì)算得到。
3.1 集群系統(tǒng)分布式轉(zhuǎn)移策略
集群任務(wù)中,每個(gè)任務(wù)星之間姿態(tài)、位置、速度等信息與集群中相鄰成員進(jìn)行交互,采用分布式控制方法,不需要獲取全部集群成員的信息,減少信息量的同時(shí)降低了單顆星上計(jì)算機(jī)的要求。
獲得任務(wù)模式和星群規(guī)模后,“空間基地”通過(guò)改變軌道面以及Lambert轉(zhuǎn)移來(lái)縮短“空間基地”與目標(biāo)星的距離。在確定任務(wù)星與“空間基地”的軌道要素后,先在兩軌道面交點(diǎn)上用一次脈沖改變軌道平面,對(duì)于本身已經(jīng)共面或者兩軌道面相差較小的情況可以跳過(guò)這部分。修改完軌道面后,通過(guò)Lambert轉(zhuǎn)移縮短“空間基地”與目標(biāo)星的距離,其中Lambert轉(zhuǎn)移的時(shí)間以及圈數(shù)通過(guò)優(yōu)化算法得到,在優(yōu)化中時(shí)間約束在適當(dāng)范圍內(nèi),以所需總速度改變量為優(yōu)化目標(biāo)。當(dāng)目標(biāo)星進(jìn)入“空間基地”任務(wù)執(zhí)行范圍內(nèi)后,“空間基地”進(jìn)行減速,既避免與目標(biāo)星距離過(guò)近,也減少了指揮星與目標(biāo)星的速度差。圖2給出集群“空間基地”轉(zhuǎn)移部分流程圖。

圖2 集群“空間基地”轉(zhuǎn)移部分流程圖
集群中單個(gè)衛(wèi)星近距離軌道轉(zhuǎn)移采用相對(duì)軌道坐標(biāo)系,以星群群組中的指揮星為中心,實(shí)現(xiàn)任務(wù)星星群由“空間基地”向目標(biāo)星的接近。建立由指揮星與N個(gè)任務(wù)星組成的第j輪星群小組相對(duì)運(yùn)動(dòng)關(guān)系:
(8)


(9)

(10)

3.2 集群任務(wù)構(gòu)型優(yōu)化
當(dāng)“空間基地”完成減速后,開始進(jìn)行集群星群小組構(gòu)型優(yōu)化與分布式控制。任務(wù)星個(gè)數(shù)以及任務(wù)模式由頂層決策得到。執(zhí)行任務(wù)的構(gòu)型通過(guò)代理模型進(jìn)行優(yōu)化[16-17]。圖3為所示的集群構(gòu)型優(yōu)化與分布式控制流程圖。
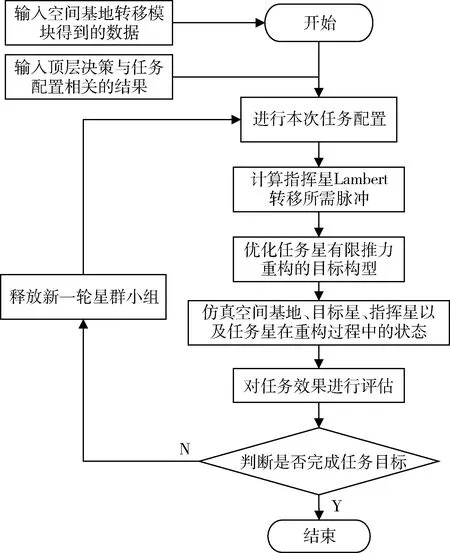
圖3 集群構(gòu)型優(yōu)化與分布式控制流程圖
對(duì)于目標(biāo)探測(cè)、動(dòng)能攔截和空間非合作目標(biāo)交會(huì)這3種不同的任務(wù)模式,在任務(wù)構(gòu)型的優(yōu)化中,分別設(shè)置了不同的目標(biāo)函數(shù)以及約束條件。
(1)目標(biāo)探測(cè)
在任務(wù)構(gòu)型的優(yōu)化中,約束條件為任務(wù)星與目標(biāo)星的距離能夠處于星上設(shè)備所及的探測(cè)范圍內(nèi)。優(yōu)化目標(biāo)考慮3個(gè)因素:1)整個(gè)重構(gòu)過(guò)程所消耗的推進(jìn)劑總量最小;2)指向性問題。對(duì)于星上設(shè)備指向或者激光照射位置有明確要求的目標(biāo),安排盡量多的任務(wù)星滿足這一要求;對(duì)于沒有要求的衛(wèi)星,盡量使得任務(wù)星在空間上分布較為均勻,盡量從多個(gè)方向探測(cè)目標(biāo);3)由于目標(biāo)探測(cè)需要持續(xù)觀測(cè),希望在執(zhí)行任務(wù)期間,任務(wù)星相對(duì)于目標(biāo)星的角速度盡量較小。
(2)動(dòng)能攔截
在任務(wù)構(gòu)型的優(yōu)化中,約束條件為執(zhí)行時(shí)刻任務(wù)星能夠與目標(biāo)星發(fā)生碰撞,即任務(wù)星在任務(wù)期間的位置應(yīng)當(dāng)都在目標(biāo)星的體積內(nèi)。優(yōu)化目標(biāo)考慮2個(gè)因素:1)碰撞時(shí)相對(duì)速度盡量較大,才能保證撞擊的效果;2)對(duì)于不同的任務(wù)星,其與目標(biāo)星碰撞的角度與位置盡量存在一定差異,從而能夠?qū)⑿Ч畲蠡?/p>
(3)非合作目標(biāo)交會(huì)
約束條件設(shè)置為執(zhí)行時(shí)刻任務(wù)星與目標(biāo)星的相對(duì)距離和速度在一定范圍內(nèi),對(duì)于目標(biāo)交會(huì)而言,這里的執(zhí)行時(shí)刻并非直接交會(huì)的時(shí)刻,而是任務(wù)星開始近距離逼近目標(biāo)的時(shí)刻。優(yōu)化目標(biāo)考慮2個(gè)因素:1)與目標(biāo)探測(cè)相同,希望所消耗的推進(jìn)劑盡量較少;2)從實(shí)現(xiàn)交會(huì)的角度考慮,需要使得在執(zhí)行時(shí)刻,目標(biāo)星與任務(wù)星的相對(duì)速度盡量較小,從而避免在交會(huì)對(duì)接中發(fā)生碰撞,影響任務(wù)效果。
4 集群系統(tǒng)協(xié)同控制
在復(fù)雜空間環(huán)境中,眾多集群個(gè)體協(xié)同配合執(zhí)行任務(wù),進(jìn)行有效的協(xié)同制導(dǎo)或跟瞄控制,可提高目標(biāo)探測(cè)的準(zhǔn)確性和任務(wù)效能。
4.1 集群系統(tǒng)協(xié)同末制導(dǎo)
空間集群任務(wù)中,集群航天器始終運(yùn)行在軌道空間,與目標(biāo)之間相對(duì)運(yùn)動(dòng)狀態(tài)變化很快,要求其具備高精度制導(dǎo)和控制能力。而集群系統(tǒng)內(nèi)多個(gè)個(gè)體對(duì)目標(biāo)進(jìn)行不同位置、不同角度的觀測(cè),需要任務(wù)星在時(shí)間上具有統(tǒng)一性。因此,在任務(wù)執(zhí)行過(guò)程中,采用基于線性二次型調(diào)節(jié)器(LQR)的控制器,使集群個(gè)體執(zhí)行任務(wù)時(shí)能夠最小化與目標(biāo)航天器的誤差,實(shí)現(xiàn)高精度的集群協(xié)同末制導(dǎo)。
4.2 集群系統(tǒng)姿態(tài)協(xié)同控制
目標(biāo)探測(cè)與空間交會(huì)具有較高的姿態(tài)機(jī)動(dòng)和指向控制精度要求。在軌道轉(zhuǎn)移后,每組任務(wù)星圍繞在目標(biāo)星周圍,調(diào)整姿態(tài)以進(jìn)行末制導(dǎo)。以目標(biāo)探測(cè)為例,期望衛(wèi)星能調(diào)整姿態(tài)對(duì)準(zhǔn)目標(biāo)星,即本體軸在任務(wù)星與目標(biāo)星的連線上。軌道轉(zhuǎn)移過(guò)程中的姿態(tài)根據(jù)所需推力方向進(jìn)行調(diào)整。經(jīng)過(guò)一定時(shí)間的姿態(tài)穩(wěn)定,最終各個(gè)衛(wèi)星的姿態(tài)都達(dá)到期望值,繼而執(zhí)行任務(wù)指令。
5 仿真實(shí)例
小衛(wèi)星集群系統(tǒng)針對(duì)單個(gè)目標(biāo)進(jìn)行空間集群任務(wù)規(guī)劃,“空間基地”初始軌道要素為:軌道半長(zhǎng)軸as=7178137m,偏心率es=0,軌道傾角is=30°,升交點(diǎn)赤經(jīng)Ωs=30°,近地點(diǎn)幅角ωs=0°,緯度幅角Ms=0°。目標(biāo)初始軌道要素為:軌道半長(zhǎng)軸at=7178137m,偏心率et=0,軌道傾角it=35°,升交點(diǎn)赤經(jīng)Ωt=35°,近地點(diǎn)幅角ωt=0°,緯度幅角Mt=10°。集群任務(wù)配置為:集群最大任務(wù)輪次為6次,單次最大衛(wèi)星數(shù)20個(gè)。目標(biāo)整星重量1000kg,種類為遙感衛(wèi)星。
采用本文的方法完成空間環(huán)境感知和態(tài)勢(shì)評(píng)估,并進(jìn)行集群任務(wù)規(guī)劃、軌道轉(zhuǎn)移與構(gòu)型優(yōu)化,最終實(shí)現(xiàn)分布式控制。圖4給出“空間基地”與目標(biāo)星相對(duì)軌道(轉(zhuǎn)移段)。此次任務(wù)共進(jìn)行4輪星群釋放,每一輪智能決策與指揮結(jié)果分別為目標(biāo)探測(cè)(9顆任務(wù)星)、目標(biāo)探測(cè)(10顆任務(wù)星)、目標(biāo)交會(huì)(10顆任務(wù)星)、目標(biāo)交會(huì)(10顆任務(wù)星)。任務(wù)規(guī)劃過(guò)程中的相對(duì)軌道如圖5~8所示。
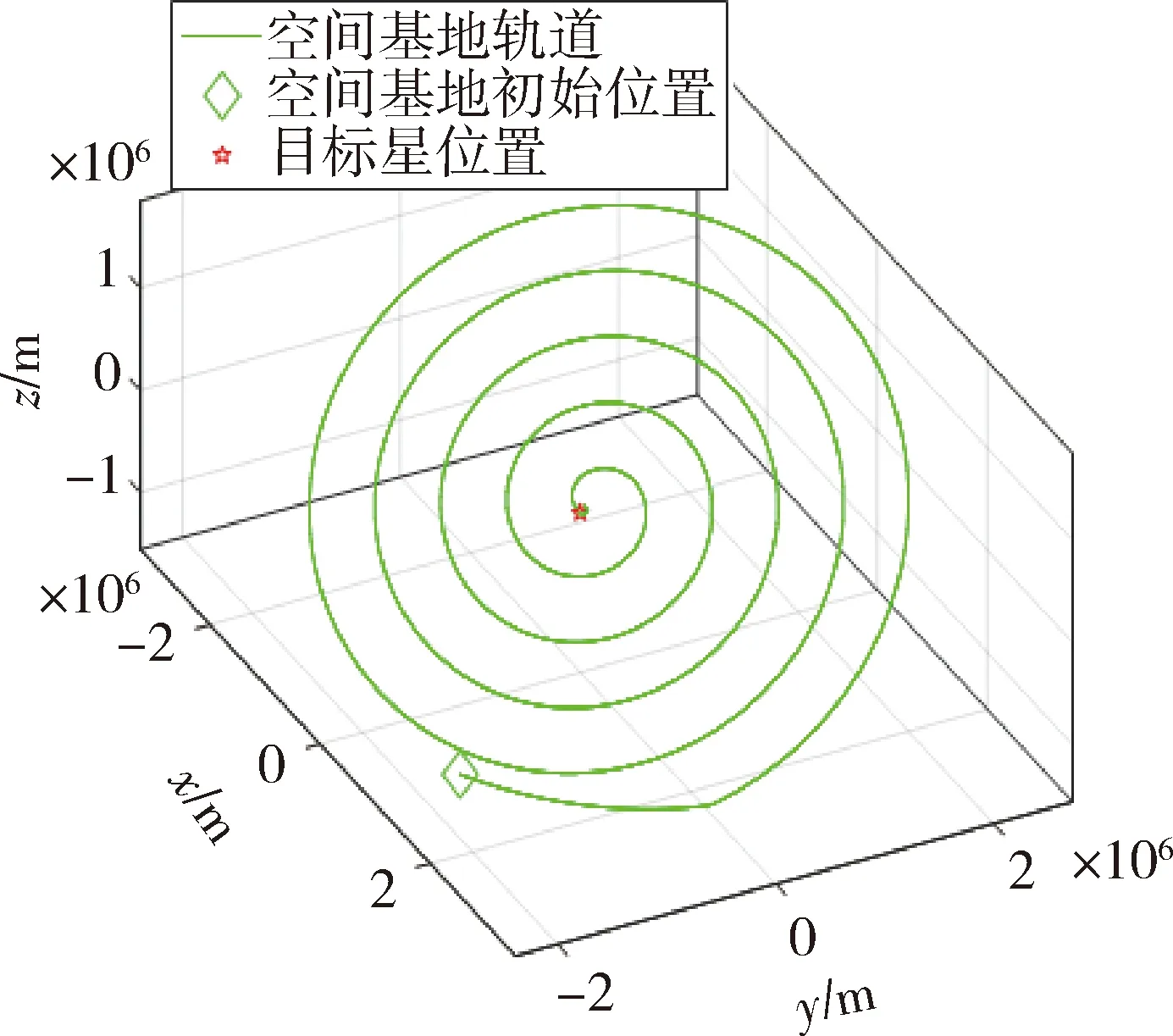
圖4 “空間基地”與目標(biāo)星相對(duì)軌道(轉(zhuǎn)移段)
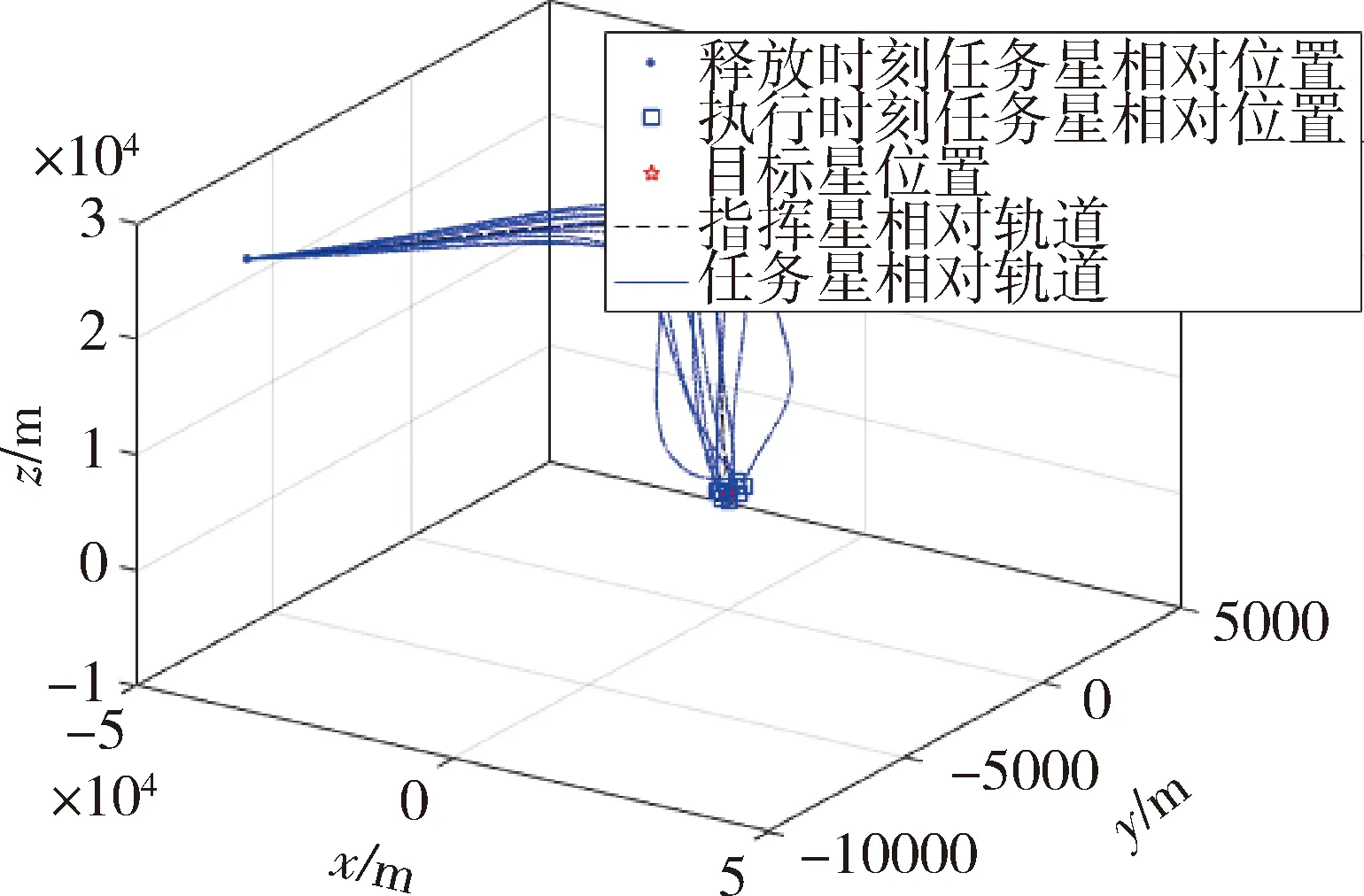
圖5 第1次任務(wù)軌道(目標(biāo)探測(cè))
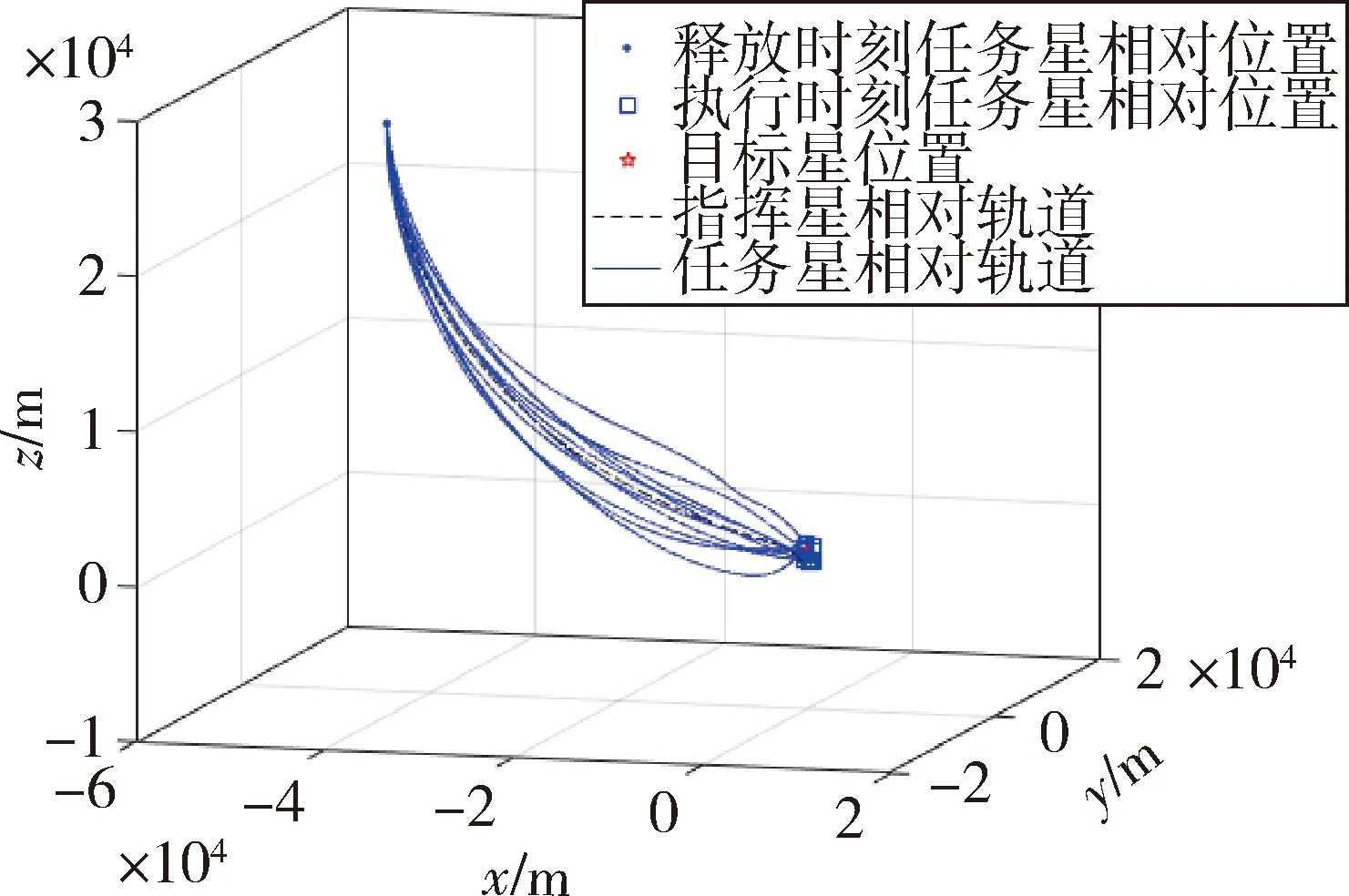
圖6 第2次任務(wù)軌道(目標(biāo)探測(cè))
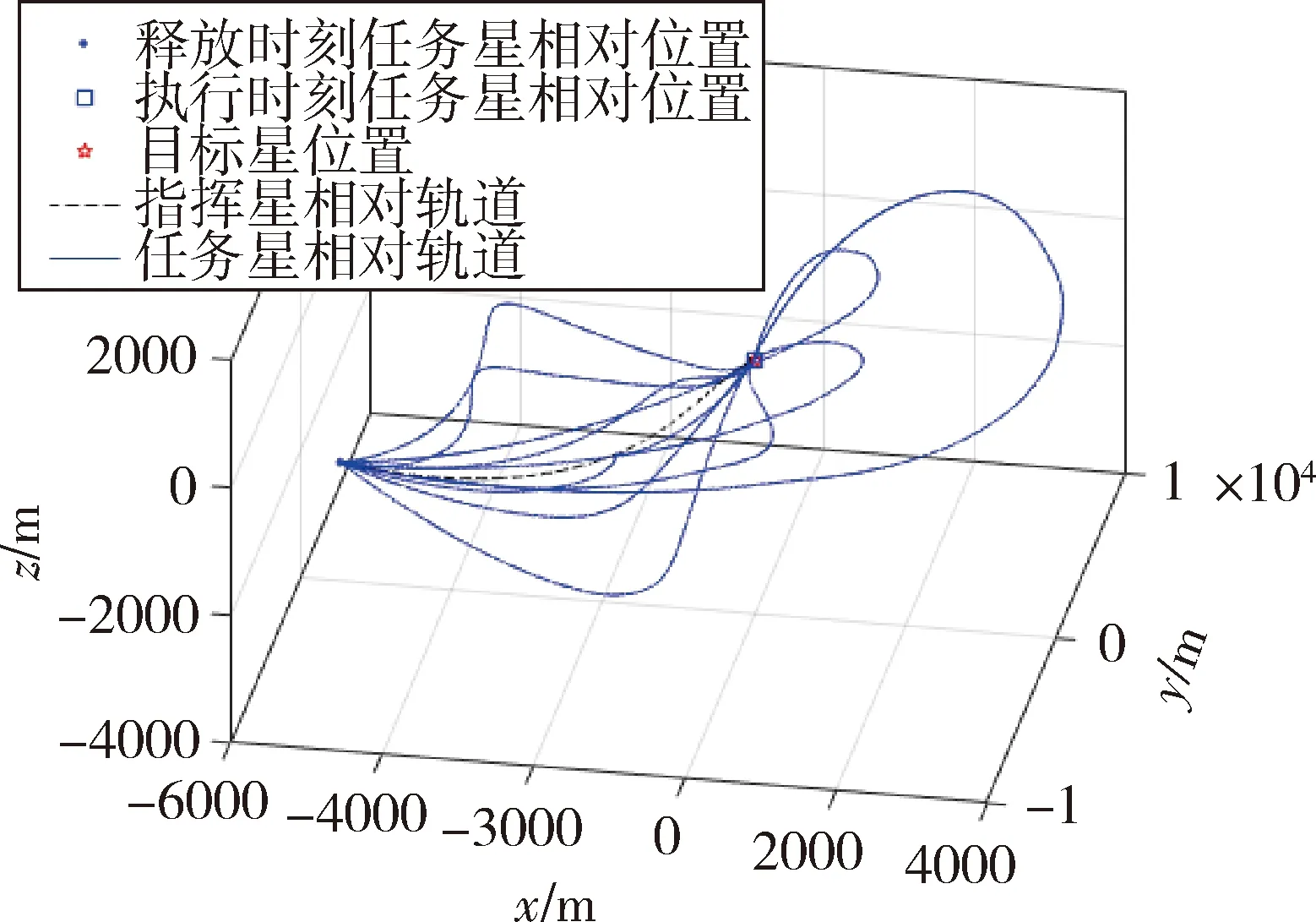
圖7 第3次任務(wù)軌道(目標(biāo)交會(huì))

圖8 第4次任務(wù)軌道(目標(biāo)交會(huì))
6 結(jié)論
針對(duì)空間任務(wù)復(fù)雜的特點(diǎn),給出小衛(wèi)星集群自主任務(wù)規(guī)劃方案、任務(wù)模式及數(shù)量選取策略和集群協(xié)同控制方法等關(guān)鍵技術(shù),為小衛(wèi)星集群系統(tǒng)執(zhí)行復(fù)雜任務(wù)技術(shù)奠定基礎(chǔ)。提出基于多Agent系統(tǒng)的集群智能指揮與訓(xùn)練決策方法,讓所有的集群個(gè)體圍繞共同任務(wù)目標(biāo),相互協(xié)調(diào)配合,完成獨(dú)立個(gè)體無(wú)法完成的任務(wù)。為提高小衛(wèi)星集群個(gè)體配合執(zhí)行任務(wù)時(shí)對(duì)目標(biāo)探測(cè)的準(zhǔn)確性,采用有效的協(xié)同制導(dǎo)和跟蹤控制,提高集群任務(wù)效果。通過(guò)對(duì)大量航天器進(jìn)行動(dòng)力學(xué)建模,構(gòu)建態(tài)勢(shì)環(huán)境,設(shè)計(jì)智能指揮與決策策略,從指揮決策、協(xié)同飛行到末端制導(dǎo)進(jìn)行全過(guò)程仿真,實(shí)現(xiàn)對(duì)小衛(wèi)星集群真實(shí)任務(wù)場(chǎng)景的高可信度推演。小衛(wèi)星集群化設(shè)計(jì)將有利于提高系統(tǒng)的適應(yīng)性、穩(wěn)定性和魯棒性,為未來(lái)開展更大規(guī)模集群建設(shè)提供技術(shù)支撐。