機載氣象雷達目標的三維建模方法研究
2022-09-08 12:14:58李明磊朱岱寅
雷達科學與技術 2022年4期
關鍵詞:可視化
劉 琴, 李明磊, 汪 玲, 朱岱寅, 錢 君
(1. 南京航空航天大學, 江蘇南京 211106;2. 中國航空工業集團公司雷華電子技術研究所, 江蘇無錫 214063)
0 引 言
機載氣象雷達的主要功能是探測飛機航路前方及左右扇形區域內的天氣狀況,以便幫助飛行員選擇安全的航線避繞各種危險的氣象區域,對保障飛行安全有著積極意義。然而,氣象雷達原始數據繁冗,難以從中直接發現規律。使用先進的可視化技術能使某一時刻氣象目標的分布和形態變得形象直觀,將氣象數據轉換為易于觀察的圖形或圖像,能夠提升飛行員對復雜氣象狀況的快速研判能力。
近年來,地面站氣象雷達數據的三維可視化技術發展迅速,許多國內外學者對此都進行了較為深入的研究。普渡大學研發了NEXRAD II級多普勒數據可視化系統,它可以處理和繪制來自多個站點的大量多普勒二級天氣數據,通過對氣象數據做配準融合處理后實現了云層的立體可視化。Liang等提出了一種體射線追蹤方法,基于從地理坐標系中直接采集的球形體紋理,可在虛擬地球上直觀地顯示大氣的體繪制形態。Oliveir等基于WebGL平臺,在瀏覽器上以點云的可視化方式對氣象雷達數據進行三維可視化。國內沈震宇等利用等值面生成、體繪制、質點追蹤等方法,結合圖形繪制技術對氣象數據進行處理,實現了氣象標量場和矢量場的可視化。劉巖等提出了天氣雷達數據點的三維空間定位方法和任意基線雷達數據垂直剖面算法,并對移動立方體算法(Marching Cubes,MC)進行改進,實現了天氣雷達數據的三維可視化系統。付則鑫等利用立方體網格算法構建三維數據場,結合MC算法實現了氣象雷達數據的三維重建。畢碩本等提出了基于多層次體繪制技術,實現了氣象標量數據的動態變化顯示,并對傳統的MC算法進行改進,得到了更精確的效果。
目前對于機載氣象雷達數據三維可視化的研究較少。與地基雷達相比,機載氣象雷達以飛機為運載平臺,在飛行中觀測更具靈活性,可以從新的視角揭示天氣信息。但是機載雷達數據由于動態觀測的特點,獲得的氣象點云噪聲更加嚴重,俯仰觀測角的范圍也相對狹窄。現有技術可以從氣象雷達的回波信號中恢復測量出屬于冰雹和強降水云團等氣象目標的三維點云區域,為進一步對氣象目標進行分析提供了基礎。
傳統的機載氣象回波數據的可視化大多局限在二維平面上,比如平面位置顯示器(Plan Position Indicator,PPI)和距離高度顯示器(Range Height Indicator,RHI)等,只能反映某一切面的氣象分布情況。事實上,僅顯示二維信息無法直觀地了解機載氣象目標的輪廓和空間分布情況。因此本文圍繞機載毫米波雷達探測的氣象目標的三維點云數據展開三維建模研究。針對氣象雷達數據特征,提出了一種結合-shape和泊松重建的氣象目標點云三維表面建模的方法,重建結果可直觀地展示氣象目標的三維空間幾何形態。
1 氣象目標數據三維建模技術
目前,基于等值面的重建算法常用于氣象雷達數據的三維重建。等值面的生成一般采用MC算法。MC算法在進行等值面提取的時候會出現二義性問題,可能會造成重建表面上出現空洞,對氣象回波數據的信息表達不夠完整。并且,由于機載氣象雷達數據分布不均且離散,具有遠離雷達處數據采樣點稀疏,靠近雷達處數據采樣點密集的特點,進一步加大了氣象目標三維重建的難度。為了獲得清晰的氣象目標表面信息,本文針對機載氣象雷達數據的空間分布特征,首先利用-shape算法對氣象目標點云進行初重建,以獲得點云的外輪廓點;再采用主元分析法對點云進行法向量估計,獲得擁有法向量信息的氣象目標外輪廓點云;最后使用泊松重建算法對氣象目標數據進行三維表面重構。算法流程圖如圖1所示。

圖1 算法流程圖
1.1 氣象目標點云外輪廓點的獲取
氣象目標點云分布散亂,且包含大量冗余數據。提取其外輪廓點可以濾除異常觀測點和目標結構內部的點,從而縮減點云的數量,同時突出氣象目標的表面特征信息,有助于提高后續表面重建的計算速度。
-shape是從離散的空間點集抽象出其直觀形狀的一種方法。其本質為滾球法,主要思想是通過控制半徑為的球,在點集上滾動來判斷邊界點,并在得到的邊界點處建立三角面片,重構出整個點集的表面。其中,由于參數控制了生成多面體的精細程度,會直接影響表面重構結果,故傳統方法需要多次試驗調整參數的值。
為了適應不同密度的氣象雷達點云數據,本文采用動態值來重建-shape表面。該算法在原本算法的基礎上,以點集中點的近鄰樣本平均距離作為值,通過不斷更新的值來判斷邊界點,重建出點云表面,以獲取點云的外輪廓點。算法步驟如下:
1) 設輸入點云為,對其建立空間索引k-D樹,從中任選一點,計算其近鄰平均距離,作為參數的值。在點集中搜索到距離點2內的所有點,記為點集。
2) 選取中任意兩點和,根據、、三點的坐標和,計算過三點且半徑為的球的球心坐標和′。
3) 在點集中除去和點后,計算其他點分別到和′的距離,若其他點到的距離均大于,或者到′的距離均大于,則表明、、是邊緣輪廓點,三點構成邊界三角形。反之,則表明、、不是邊界點。執行下一步。
4) 選擇點集中的下一組點,依照步驟2)和3)進行判斷,直到遍歷完點集中的所有點。
5) 選擇中的下一個點,重復上述流程進行判斷,直到遍歷完點集中的所有點。輸出點云重構表面三角形面片集合。
將氣象目標點云數據作為輸入,使用-shape算法,對點云數據進行三角面片化,得到點云重構表面集合,并提取點云的外輪廓點集,記為={,,…,}。
1.2 法向量估計
氣象點云表面重建基于點云數據的法向量信息,其重建效果受法向量直接影響。目前,常用的點云法向量估計方法可分為以下三種:基于Delaunay三角分割法、基于魯棒統計學方法和基于局部表面擬合法。其中,基于Delaunay三角分割法不適用于受噪聲干擾的點云,基于魯棒統計學方法以計算開銷很大的表面重建為前提,計算太過于復雜。本文選擇主元分析法(Principal Component Analysis,PCA)來進行氣象目標點云數據的法向量估計。
PCA用局部擬合平面的方法來估算法向量,可以快速地獲得表面點云的法向量信息。其主要思路是對點云中的每一個點,獲得其鄰域點集{,,…,},根據總體最小二乘原理,計算出這些點所擬合的局部平面Π,其表述方程如式(1)所示。

(1)


(2)
還需對法向量進行方向一致性處理,可以根據視點方向進行調整。假設視點,對于法線需滿足式(3),若不滿足方程,則用-代替。
(-)·>0
(3)
輸入氣象目標點云外輪廓的點集合={,,…,},利用PCA算法估計其法向量,輸出記為={,,…,},其中每個樣本點都存在一個點坐標和對應法向量s.。
1.3 氣象目標點云表面重建
泊松重建是一種全局優化的隱式重建算法,其輸入是點云數據包含點坐標及其法向量,輸出是三維網格頂點數組與三角形數組。該算法結合全局擬合和局部擬合的優點,在保證局部點云特征的同時,對點云數據進行全局性的曲面重建。基本思想是利用預估的目標模型表面的指示函數,提取點云的等值面來構建三維模型表面。

1) 離散化問題。對樣本點數據集,使用樣本點的位置定義八叉樹?,?的最大深度為。給?的每個節點,附加一個描述函數。設定基函數,作為盒濾波的維卷積,如式(4)所示。可以通過基函數平移縮放生成。式(5)中表示節點對應的包圍盒的中心,表示節點對應的包圍盒的寬度。
(,,)≡(()()())*,
(4)

(5)


(6)




(7)

2 實驗結果分析
2.1 實驗說明
本文實驗運行在一臺配置為Intel Core i5-9300HF CPU,16G內存,win10操作系統的計算機上。實驗采用的氣象雷達數據是經過地雜波抑制等質量控制后,提取的氣象目標點云,目標類型可以是降雨云團、雷暴云團和卷積云團等。實驗采用了一組機載氣象雷達實測數據、一組依據機載氣象雷達掃描原理得到的氣象目標仿真數據,以及三組模擬云團數據。其中,實測數據由中航工業雷達研究所研制的新一代毫米波氣象雷達在載機高度6 907 m時,俯仰 [-6.03°, -9.59°]范圍內掃描所得的回波數據;仿真數據是仿真參數為載機高度10 000 m,掃描方位為[-30°, 30°],俯仰范圍為[-14°, 3°]所得數據;模擬云團數據為依據氣象目標點云特征所得的參照數據。
由于雷達采集到的氣象數據是具有不同輻射強度的離散的空間三維點,這些點以球極坐標形式記錄,建模前需先對點云數據進行坐標轉換,將其轉換為笛卡爾坐標。為了驗證算法的有效性,本文基于Visual C++平臺、QT界面框架以及計算幾何算法庫(Computational Geometry Algorithms Library,CGAL)對上述算法進行實現,開發了一套機載氣象雷達三維目標可視化程序。圖2為可視化程序界面圖,其中圖2(a)為一組機載氣象雷達實測數據的原始點云圖,圖2(b)為提取的氣象目標(即圖2(a)中箭頭所指區域)的三維建模效果圖。

(a) 機載氣象雷達掃描原始點云

(b) 提取的氣象目標表面建模圖圖2 可視化程序界面
2.2 不同算法的效果比較
選用兩組模擬云團數據作為數據分析源,分別用-shape算法、MC算法以及本文算法進行三維表面重建,并對3種算法效果進行分析。3種算法對云團點云數據的三維表面重建結果如圖3和圖4所示。表1列舉了可視化處理中的數據統計,原始點云分布較為離散,利用-shape算法對云團重建結果可基本反映出云團的輪廓信息,但丟失了大量的細節區域,且生成的三角面片組成的表面為非流形(Non-manifold)表面。因而單一使用-shape算法對氣象目標進行表面重建不能滿足氣象三維的要求,但可以看出-shape算法可以快速獲取氣象目標的外輪廓點;基于MC算法的云團三維重建結果對云團表面輪廓表達較為完整,重建曲面更為光滑且符合云團的概念,但表面存在部分孔洞,且運算時間較長;基于泊松重建算法生成的云團表面輪廓清晰,逼近真實表面,局部細節特征明顯。

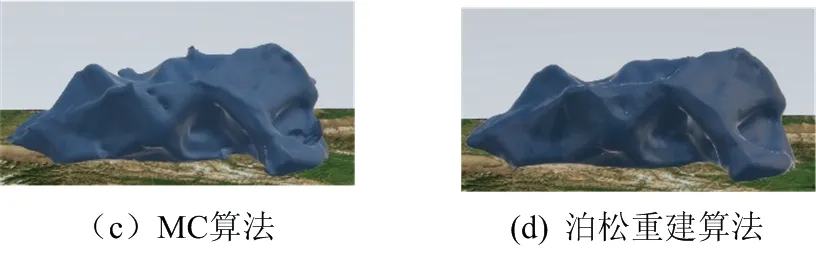
圖3 3種算法的云團1重建效果
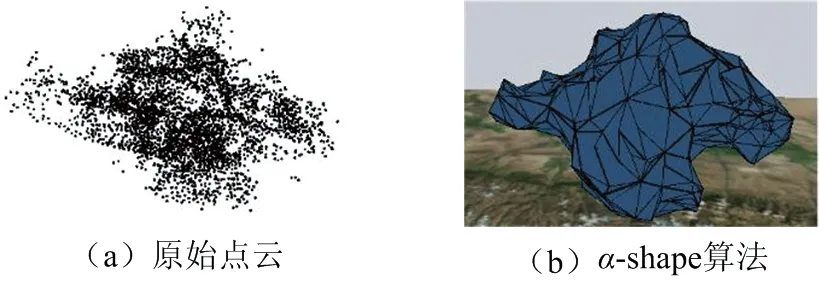

圖4 3種算法的云團2重建效果
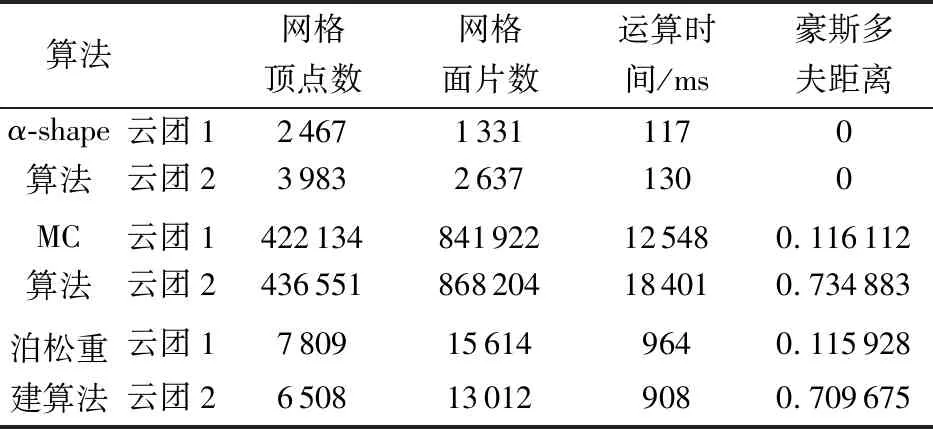
表1 3種算法實驗比較結果
為了更好地分析表面重建效果的好壞,采用豪斯多夫距離(Hausdorff distance)將重建模型與原始點云之間的差異定量化。豪斯多夫距離是兩組點集之間的距離度量,可以描述兩組點集的相似程度。由于-shape算法是顯式曲面重建,其網格頂點即為原始點云中的點,不對其進行表面模型精度分析。結合表1和圖5可得,MC算法和泊松重建算法與原始點云之間的豪斯多夫距離相差不大,二者重建質量效果圖中代表高質量重建結果的藍綠色分布較為廣泛,表明重建表面與原始數據的擬合程度較為理想,但也存在部分區域呈現紅色或黃色,這是由于噪聲干擾帶來的偏差。整體來看,基于泊松重建算法得到的重建模型更為符合氣象目標三維建模的要求。

圖5 基于豪斯多夫距離的云團重建誤差分析
2.3 不同深度效果分析
泊松重建算法在點云數據網格化時,八叉樹細分深度不同,生成的模型表面也會存在差異。實驗分析了采用不同八叉樹深度值對兩種云團數據進行表面重建的效果差異,其中云團3為一組模擬云團數據,云團4為一組根據機載氣象雷達掃描原理得到的氣象目標仿真數據,重建結果如圖6和圖7所示。
由表2可知,當泊松重建的深度值為5時,重建模型細節特征不明顯,只能顯示出云團的大致輪廓,其表面網格頂點數和三角面片數較少,重建效果粗糙;當深度值為6時,云團輪廓較為清晰,重建表面開始顯現局部細節特征。相較于深度值小的重建,生成表面的頂點數和三角面片數增多,運算時間也加長;當深度值為7時,云團重建表面細節特征明顯,其生成網格頂點數和面片數成倍增加,重建效果好,但是也需要更長的時間完成運算;當深度值為8時,重建結果差異十分有限,且運算時間明顯增加。考慮到效率問題,


圖6 不同深度值云團3的泊松重建效果


圖7 不同深度值云團4的泊松重建效果
當八叉樹深度為6時,云團重建效果即可滿足分析需求。

表2 泊松重建實驗結果
3 結束語
本文利用-shape算法可快速準確地提取點云外輪廓點的能力,將氣象目標點云作為算法的輸入,獲得擁有氣象目標表面特征信息的外輪廓點。提出使用泊松表面建模方法對氣象目標進行三維表面重建,其重建結果能清楚地反映氣象目標的輪廓信息。與僅使用-shape算法和MC建模的算法進行對比,證明了本文算法對氣象目標的三維表面重建的可行性。開發了氣象雷達數據可視化軟件,可直觀、全面地展示氣象目標在三維空間中的分布情況,有利于飛行員及時掌握氣象目標的狀態,進而達到預警和規避危險氣象區域的目的。
猜你喜歡
江蘇安全生產(2022年7期)2022-08-24 02:11:52
世界科學技術-中醫藥現代化(2022年3期)2022-08-22 00:32:50
北京測繪(2022年6期)2022-08-01 09:19:06
選煤技術(2022年2期)2022-06-06 09:13:12
師道·教研(2022年1期)2022-03-12 05:46:47
云南化工(2021年8期)2021-12-21 06:37:54
北京測繪(2021年7期)2021-07-28 07:01:18
海洋信息技術與應用(2020年1期)2020-06-11 12:43:56
山東農業工程學院學報(2019年11期)2020-01-19 02:49:22
傳媒評論(2019年4期)2019-07-13 05:49:14
