面向風景園林應用的面積測量精度對比研究
2022-08-29 09:37:12于清瑤王紅艷戴士杰
中國新技術新產品 2022年10期
于清瑤 王紅艷 戴士杰
(西北農林科技大學風景園林藝術學院,陜西 咸陽 712100)
0 研究背景
面積測量關乎風景園林學的研究精度和結果信度,其在風景園林行業中的應用十分廣泛,主要包括場地感知、古典園林保護與更新、城市公園環境特征評價、園林空間集聚特征分析和園林工程。
目前風景園林學科采用的測量方法主要基于無人機、手持GPS或手機測量App。現有研究多采用單一方式測量研究對象的面積屬性,忽略其測量精度,導致研究結果信度成為“黑盒問題”。系統性的面積測量比較業已成為亟待解決的科學問題。該文基于三種主要的面積測量方法,設計對比試驗驗證其測量精度和結果信度,以定量化的方式呈現3種測量方法在各場景下的差別,為根據實際情況選擇適宜的測量方法提供可能,構建精度可控的面積測量體系。
1 研究對象與方法
1.1 研究區概況
為保證試驗的連續性,降低外部因素干擾,試驗選擇西北農林科技大學南校區田徑場(34.262678°N, 108.069433°E)為研究基址。該地地勢開闊平整,周圍無高大建筑物,能有效保證測量設備同時接受到4顆GPS衛星信號,并滿足全站儀各控制點之間通視的條件。
集思寶手持GPS儀、50米卷尺、蘇一光RTS302全站儀、大疆Mavic mini無人機、土流網測畝儀、天利測畝儀、無人機遙感數據處理軟件Pix4Dmapper3.0、移動端無人機飛行工具Pix4Dcapture3.2。
1.2 試驗內容
試驗選取大部分園林綠地中游人的可進入面積(50m~5000m)作為試驗范圍,使用全站儀、無人機、手持GPS、土流網測畝儀以及天利測畝儀5種工具,分別進行正方形地塊面積測量(約50m、100m、200m、500m、1000m、1500m、2000m、2500m、3000m、3500m、4000m、4500m、5000m)和圓形地塊面積測量(約50m、100m、200m、500m、1000m、1500m、2000m、2500m、3000m、3500m、4000m、4500m、5000m),其中以 全站儀的面積測量結果作為其他方法的參照。每次試驗重復3次,取平均值作為最終結果。
地塊面積測量結果的相對誤差如公式(1)所示。

式中:為地塊標準面積,試驗中以蘇一光RTS302全站儀所測算的試驗地塊面積值作為地塊標準面積。該GPS設備在動態條件下,測距精度可達到(1+2ppm×)mm(當被測量距離為1km時,儀器的測距精度為1mm+2ppm×1(km)=3mm,即全站儀測距1 km,最大測距誤差不大于3mm),是目前測量精度較高的外業測量儀器,能夠滿足試驗要求。a為該研究所述的集思寶手持GPS儀、大疆Mavic mini無人機、土流網測畝儀、天利測畝儀的實際測量值。
在Bigemap中通過“繪制形狀”工具選取與設定面積相近的控制點,盡量以地面上的突出標志物或田徑場邊界線等分點為準。使用卷尺量取目標面積的對應邊長,用膠帶在地面劃“+”號,標出控制點的位置。
隨著科技的發展,我們進入了信息化時代,信息技術在社會中的各個行業中都得到了廣泛的應用,當然也就能夠在旅游業中起到一定的作用。旅游人才可以通過社會化網絡服務對與旅游相關的信息進行傳播,并通過信息技術創建新的信息傳播渠道,以提高旅游產品對游客的吸引力以及在旅游行業中的競爭力,從而提高旅游業的經濟效益,使旅游業能夠得到良好發展。
設站,在要測量面積的地塊中央位置設站。
對中和整平,通過腳架對中、腳螺旋對中、腳架整平、腳螺旋整平和平移基座使全站儀的對中整平滿足試驗要求。
面積測量,調出全站儀的面積測量程序;立鏡員將帶有棱鏡的對中桿豎立在地塊邊緣的一個起始點上,對帶棱鏡的對中桿進行整平;將全站儀對準棱鏡,測出該點坐標;立鏡員沿著地塊按照順時針走到地塊的邊緣(多邊形)的另一個角點,用全站儀測出該點坐標。當走完一圈,到達最后一個角點后,測量該點坐標,在全站儀中按動功能鍵,結束測量。
數據記錄,按動計算按鈕,全站儀顯示地塊面積,將地塊面積做好記錄。
在手持GPS“面積測量“功能中新建工程文件,GPS顯示信號接收良好后,沿控制點連線順時針行走一周,記錄顯示的地塊面積。每個地塊面積進行3次試驗,取平均值作為最終結果。
天利測畝儀由天津天利信息科技有限公司于2015年開發,軟件集成測量土地面積、長度、顯示土地形狀等常見功能。使用手機App天利測畝儀中的“環繞測面積”功能測量地塊面積。沿控制點連線順時針行走一周,得到測量結果并將單位由“畝”換算成“平方米”。每個地塊面積進行3次試驗,取平均值作為最終結果。
土流網測畝儀由土流集團有限公司開發,軟件集成土地面積、周長、海拔高度、坡度顯示土地形狀等常見功能。使用手機App土流網測畝儀默認功能測量地塊面積。沿控制點連線行走一周,記錄顯示的地塊面積。每個地塊面積進行3次試驗,取平均值作為最終結果。
使用Pix4Dcapture預設定無人機自動飛行航線,設置相對飛行高度為60 m,實地飛行后,獲取照片共76張。在場內按正方形分布設置4個控制點,使用GPS實時RTK模式獲取其坐標。Pix4Dmatic是一款針對大面積測繪和廊道測繪的攝影測量軟件,將拍攝得到的照片組導入Pix4Dmapper軟件進行像素矯正與合成,并輸入控制點坐標對圖片地理信息進行校正,最后獲得正射影像圖。
使用Pix4Dmapper對照片組進行優化處理合成后,獲得場地的正射影像圖,地圖比例為1∶1,拍攝日期為2022-3-8。通過軟件內面積測量功能,拾取控制點得出面積。
2 結果與分析
2.1 地塊面積對測量精度的影響
對在同一時間段內的試驗結果,僅以地塊面積為變量進行分析,分別比較50m~5000m圓形地塊和正方形地塊的面積測量結果。根據式(1)的相對誤差計算公式,分別計算各地塊在四種測量工具下的面積測量相對誤差,結果如圖1所示。
由圖1可以看出,無論基于正方形地塊或圓形地塊,手持GPS、天利測畝儀、土流網測畝儀的測量結果相對誤差均隨地塊面積增大而降低。地塊面積在2000m以下時4種測量工具誤差變化幅度較大,2000m以上時誤差變化幅度較小。手持GPS、天利測畝儀和土流網測畝儀在地塊面積達2000m以上時,誤差逐漸降低并趨于穩定,而無人機測量誤差變化曲線則是在地塊面積達到1000m后就趨于直線。由于手持GPS、天利測畝儀、土流網測畝儀3種工具均基于GPS定位系統進行面積測量,而無人機基于拍攝-地理配準的方式進行測量,可得出結論,使用GPS定位的三種測量工具在進行兩種形狀的地塊面積測量時,其精度均具有相同的變化趨勢,即隨被測地塊面積增大,面積測量值的相對誤差逐漸減少,當被測地塊面積超過2000m時,面積測量相對誤差變化曲線趨于平緩;使用拍攝-地理配準的測量工具測量誤差隨地塊面積變化不明顯。
2.2 地塊形狀對測量精度的影響
由圖1可知,以地塊形狀為變量對試驗結果進行分析,3種手持測量工具的測量誤差在測量正方形地塊時,與測量圓形地塊時相比要小,且變化趨勢更穩定,而無人機的測量誤差在測量圓形地塊時,與測量正方形地塊時相比要小,其穩定性幾乎不受地塊形狀影響。
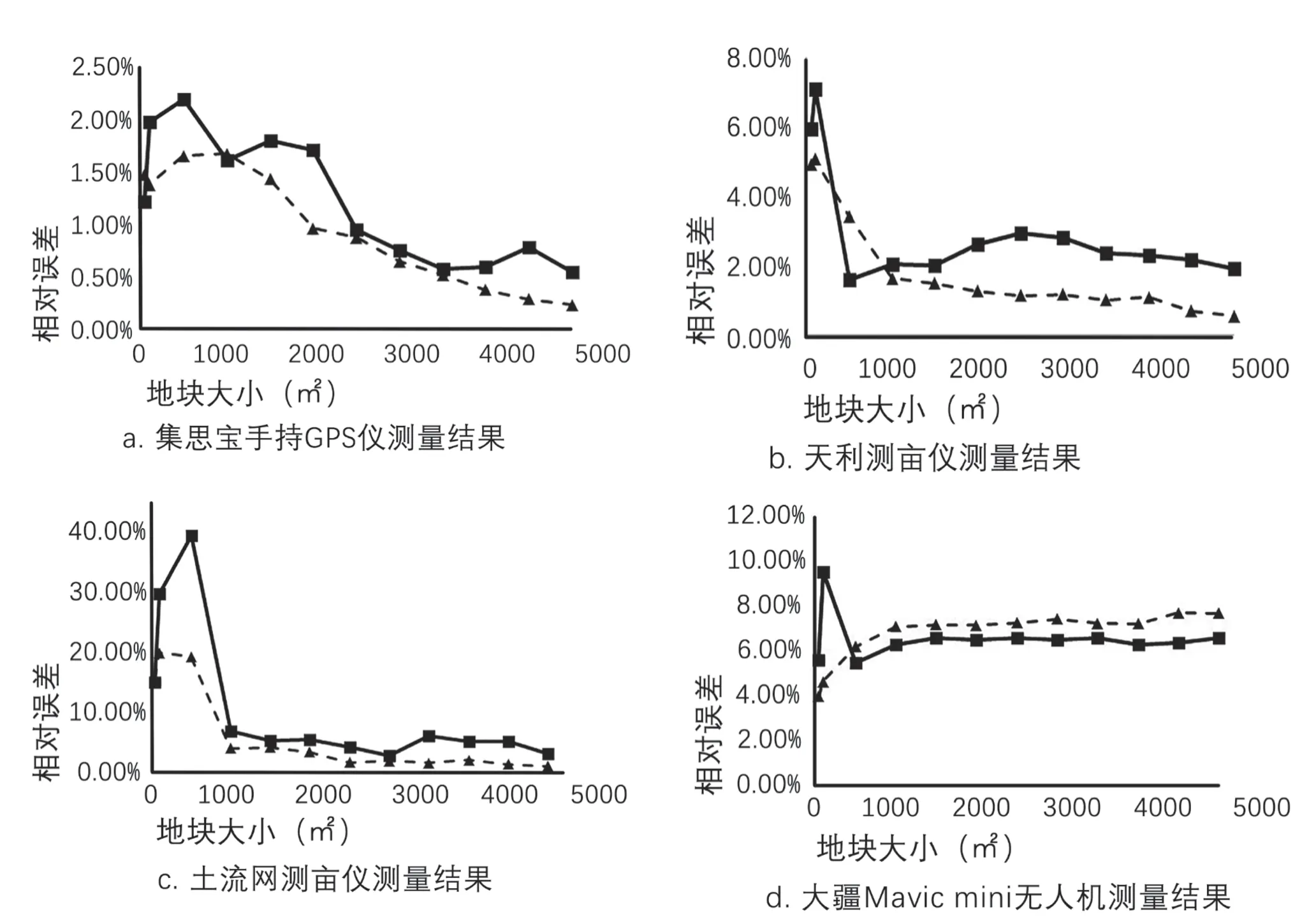
圖1 不同工具測量面積誤差趨勢圖
對上述試驗結果進行分析:全站儀和無人機地塊的面積測量范圍是控制點連線形成的多邊形,而手持測量工具的測量范圍是試驗者手持儀器經過的路徑中自動生成的測量點連線形成的多邊形,其中路徑會有偏差,測量點與控制點也不能對應。圓形地塊所需控制點數量遠多于正方形地塊,但受全站儀面積測量功能內置點數上限(30)的限制,難以保證控制點數量隨地塊面積成比例增長。而手持測量工具跟隨試驗者步行移動,其移動路徑難以嚴格遵循控制點連接而成的多邊形,更接近外接于多邊形的圓形,且儀器內部自動生成的測量點比預設的控制點數量更多,導致測量結果與標準面積相比偏大。以上3點均說明使用手持測量工具測量圓形地塊產生的誤差較大。
2.3 四種測量工具的精準度分析
評價一個設備的可靠度一般采用精準度和穩定性兩方面指標作為評價標準。在相同條件下,用四種測量工具對50m~5000m正方形地塊和圓形地塊進行面積測量,手持GPS測量面積平均誤差率分別為0.96%、1.23%;天利測畝儀測量面積平均誤差率分別為1.95%、2.97%;土流網測畝儀測量面積平均誤差率分別為6.34%、10.75%;大疆Mavic mini無人機測量面積平均誤差率分別為6.75%、6.60%。由此可知,測量工具精確度:手持GPS>天利測畝儀>土流網測畝儀>無人機。
2.4 四種測量工具的穩定性分析
變異系數用于量綱不同的變量間或平均值差別較大的變量間變異程度的比較。一般情況下,變異系數越小,數據穩定性越高,如公式(2)所示。

式中:為樣本標準差,為樣本平均值。
由于該試驗中4種測量工具對同一地塊進行面積測量的結果差異較大,選擇變異系數作為比較穩定性的指標。以4種測量工具對正方形地塊進行面積測量的數據作為依據,對同一測量地塊的3次測量結果進行分析可得,測量結果的穩定性:無人機>手持GPS>天利測畝儀>土流網測畝儀,其變異系數平均值分別為0.0020、0.0127、0.0297、0.1006。
3 結論
以地塊面積為研究變量,4種測量工具所得結果的相對誤差在地塊面積達到一定規模后呈現隨地塊面積增大而減少的趨勢;以地塊形狀為研究變量,面積測量誤差變化無明顯規律,由于試驗儀器自身條件限制和人工測量過程中的偶然誤差,正方形地塊較圓形地塊測量精度更高;基于精確度對四種測量工具進行比較可知,在未對試驗結果進行二次校準的情況下,手持GPS精確度最高,土流網測畝儀精確度最低;基于結果穩定性對四種測量工具進行比較可知,測量結果的穩定性:無人機>手持GPS>天利測畝儀>土流網測畝儀,其中無人機的結果穩定性遠高于其他測量工具。
通過手持GPS和無人機進行面積測量是當前風景園林領域測量精度和結果信度較高的方法。手持GPS具有操作簡單、輕便易攜的特點,但需人工環繞場地進行試驗,若場地郁閉度較高、面積較小,建議使用手持GPS進行面積測量;無人機測量結果信度最高,但技術要求較高且結果須經過矯正才可獲得精確數據,適用于郁閉度低、較為開闊的場地。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08
