立體庫虛擬調試與批次作業流程優化研究
2022-08-19 11:00:56都騰飛
機械設計與制造 2022年8期
都騰飛,邵 波,朱 君,劉 新
(江蘇長江智能制造研究院,江蘇 常州 213164)
1 引言
隨著以工業4.0為代表的新一輪制造業轉型變革展開[1],針對傳統的制造業項目實施過程中遇到的PLC現場調試耗時耗力的問題,以融合物聯網、大數據、人工智能的數字化制造技術應運而生。數字化制造技術[2]因其不消耗任何實際資源,通過在計算機上進行相應的設計、調試和運行,就能給出相應的方案結論,因此在很多行業都具有廣泛的應用前景。虛擬調試技術[3]作為數字化制造的重要組成環節,在項目探討研究的初期即可數字虛擬環境下進行建模、仿真、調試,大大縮短項目后期現場調試工作的運行周期,對加速項目的實現具有很高的優勢。同時在進行多任務仿真時,通過人工智能算法對整個流程進行改進,優化批次作業的整體時間,提高物流輸送效率。目前國內外基于虛擬調試的數字化仿真技術尚處于探索和研究階段,文獻[4]對機械臂的復雜系統進行建模分析,從而優化其機電系統。文獻[5]為新概念汽車建立了仿真模型并評估其運動性能。文獻[6]對機床的伺服系統進行數字化設計,并優化系統的動力學性能。
通過3DEXPERIENCE(3DE)平臺對我院的無紡布智能物流生產線進行數字化仿真設計,并通過虛擬調試技術對入庫部分的堆垛機PLC程序進行了驗證。為了進一步提高運輸效率,引入遺傳算法[7](GA,Genetic Algorithm)和粒子群優化[8](PSO,Particle Swarm Optimization)的混合人工智能算法,對批次作業任務進行優化,最后通過3DE平臺仿真作業軌跡,計算運輸時間。結果表明基于3DE的數字化制造解決方案縮短了調試和研發成本,軌跡優化過程縮短了運輸時間,提高了整體效率。
2 理論方法
2.1 虛擬調試技術
虛擬調試技術將編寫的PLC邏輯代碼輸出仿真系統進行測試與反饋,調試成功的代碼可以直接傳輸至現場待調試的設備中,從而大大減輕的現場人員的調試時間。虛擬調試的主要工作流程,如圖1所示。首先項目設備在3DE平臺進行虛擬建模,并將物流設備進行工作流程邏輯調試。調試通暢相應的工作流程后,針對項目中所使用的PLC品牌,真實模擬設備的動作和運行參數,并對PLC的邏輯關系進行修正與反饋,最終驗證通過的代碼進行輸出用于工廠的實際應用。
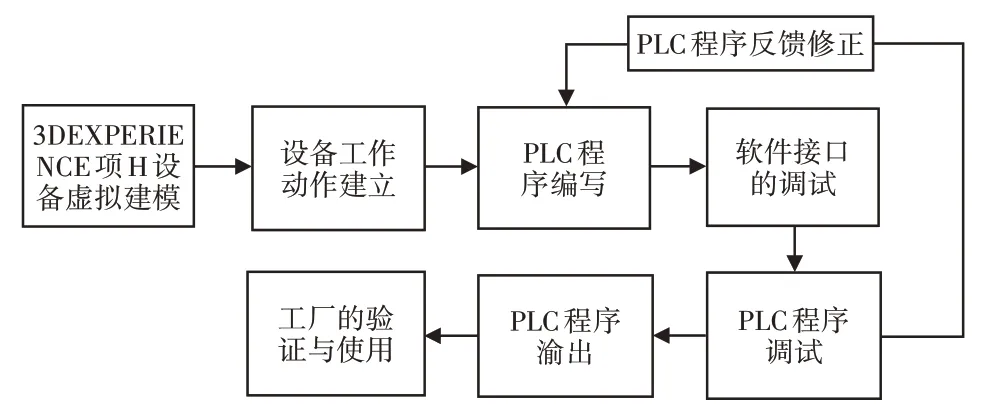
圖1 虛擬調試流程圖Fig.1 Virtual Debugging Flow Chart
2.2 遺傳算法和粒子群優化
遺傳算法作為一種進化算法,由文獻[9]于1967年首先提出。該算法的流程如下:首先從表現型到基因型完成映射編碼工作,產生初代種群并按照優勝劣汰原理演化產生出近似解。在迭代過程中根據問題域中個體的適應度選擇個體,通過遺傳算子進行組合交叉與變異,產生新的解集種群,最終迭代出最優解。遺傳算法由于迭代過程中經過交叉和變異過程,因此收斂較慢,而粒子群算法具有并行性,能快速收斂達到最優解。粒子群算法在可行解空間中初始化一群例子,每個粒子都代表極值優化問題的一個潛在的最優解,通過位置、速度和適應度三項指標來表示粒子的特征。算法通過跟蹤粒子個體的極值Pbest和群體極值Gbest來更新粒子在解空間的個體位置。其中,個體極值Pbest表示個體所經歷的位置中通過計算適應度函數得到的最優位置。群體極值Gbest指群體中所有粒子的適應度函數最優值。粒子每更新一次位置就計算一次適應度值,通過比較新粒子適應度值和個體與群體極值的適應度大小來更新個體極值Pbest和群體極值Gbest的位置。
迭代過程中,粒子通過個體極值與群體極值更新自身速度與位置,更新公式如下:

式中:w—慣性權重;d= 1,2,…,D;i= 1,2,…,n;
k—當前的迭代次數;
—粒子速度更行值;
—粒子位置更新值;
C1、C2—加速度因子;
r1、r2—(0~1)間的隨機數權重。
3 虛擬調試方法技術路線與實現
3.1 虛擬調試設備
虛擬調試設備包含硬件設備和軟件設備。硬件設備包含西門子PLC,型號S-1200,如圖2所示。軟件包含3DEXPERIENCE平臺,OPC組態軟件Kepserver和西門子的博圖軟件。其調試步驟,如圖3所示。首先建立工廠的離散化模型,數字化制造平臺定義各個設備的運動副和工作狀態,其次在軟件中對信號點進行定義并且編寫邏輯,最后通過OPC實現3DE軟件和PLC的通訊。整個調試系統,如圖4所示。
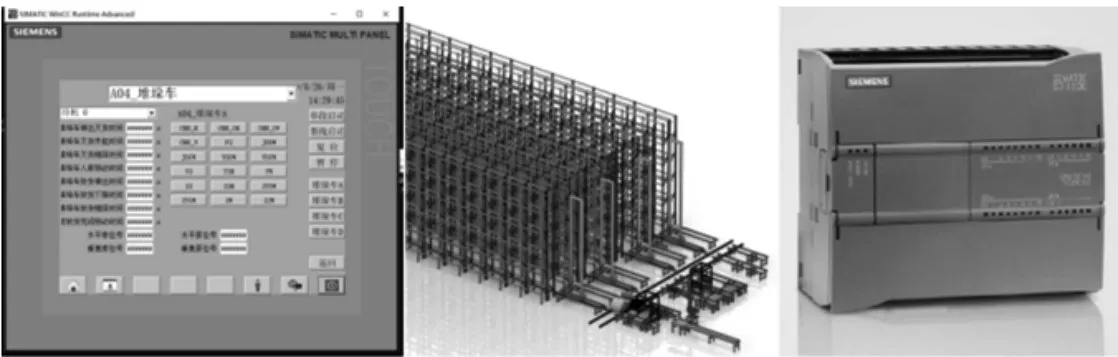
圖2 虛擬調試設備Fig.2 Virtual Debugging Device
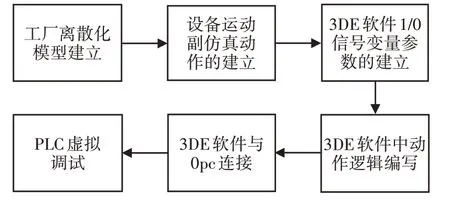
圖3 虛擬調試步驟Fig.3 Virtual Debugging Steps
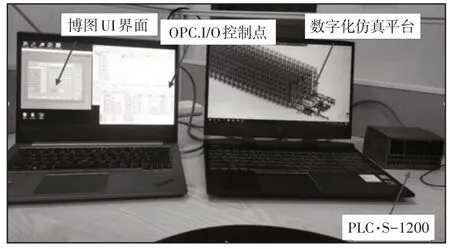
圖4 虛擬調試系統Fig.4 Virtual Debugging System
3.2 工廠離散化模型的建立
針對我院的無紡布智能物流生產線,通過3DE 平臺的Part Design與Assambly Design模塊建立整個工廠的數字化模型。整個無紡布智能生產車間包含兩條生產線,分切線,纏膜包裝線,出入庫線這幾個大的部分組成,如圖5所示。
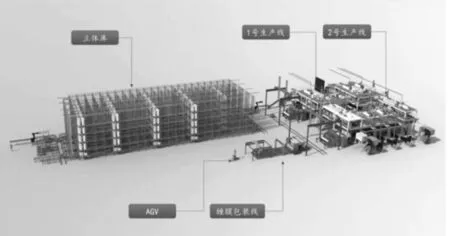
圖5 智能車間離散化數字模型Fig.5 Discrete Digital Model of Intelligent Workshop
其中,出入庫系統由于IO的交互較多,在處理復雜的訂單出入庫問題時往往現場調試需要花費大量的時間,因此對于出入庫系統的虛擬調試就十分必要。
3.3 設備動作的編程
模型初步建立后定義各個設備的運動關系。出入庫系統的運動設備包含傳送帶、拆盤機、RGV 小車和堆垛機四個運動設備。分別對設備的運動關節定義運動副,如圖6所示。確保各個設備間的正確連接關系。
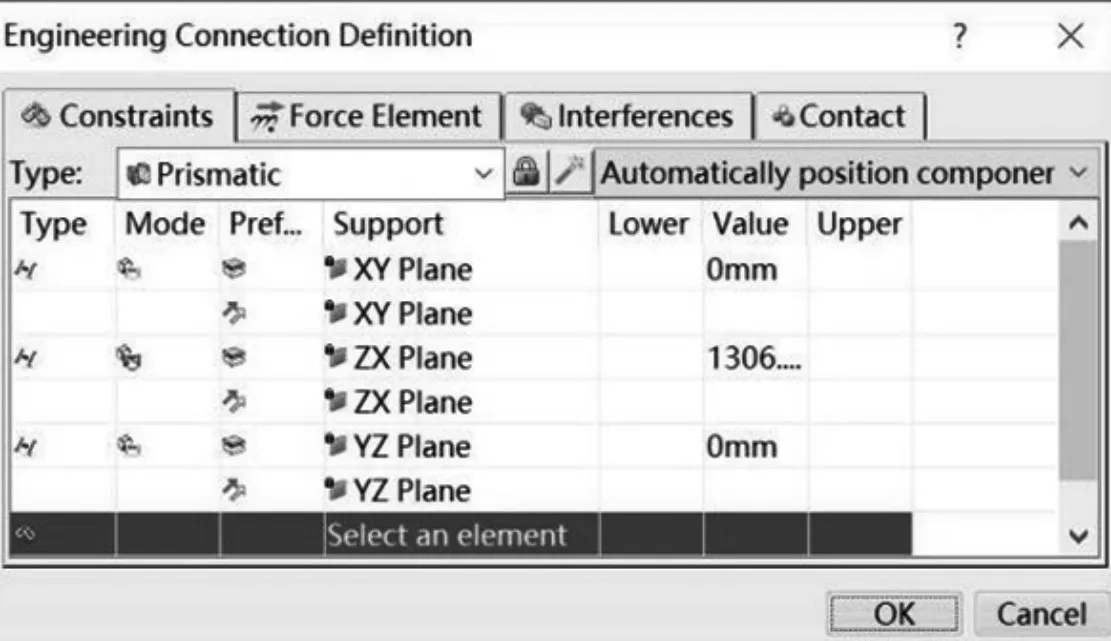
圖6 設備運動副連接Fig.6 Device Motion Pair Connection
3.4 I/O和變量參數的建立
虛擬調試需要軟件和PLC建立通信關系,首先要編寫相應的動作使得設備進行運動,同時在軟件中建立相應的I∕O口與PLC進行通訊以控制設備的啟停。實際生產中只需給定PLC指定的庫位號,堆垛機就可以按照程序找到指定的位置。在3DE中還需建立相關的變量參數以便將庫位號和軟件中的實際位置進行轉換。I∕0參數表,如表1所示。
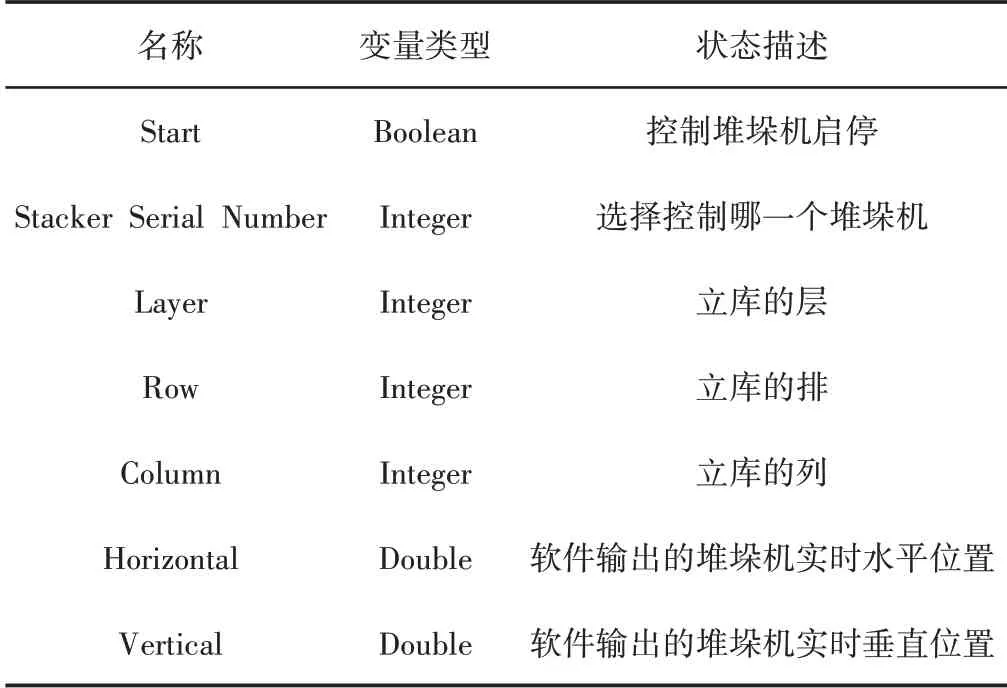
表1 3DE中I/O信號設置Tab.1 I/O Signal Settings in 3DExperience
3.5 3DE軟件庫位號尋址
3DE軟件的庫位號尋址邏輯,如圖7所示。由于立體庫中有四臺堆垛機,每臺堆垛機控制的立庫排數不同,因此在PLC輸入庫位號時需進行判斷并計算堆垛機的運行距離。邏輯編寫時的相關參數,如表2所示。參數H_var和V_var分別表示的是堆垛機在仿真軟件中的實時坐標位置。根據每個庫位的長、寬、高可以將PLC輸入的庫位號轉換為相應的目標坐標位置H和V,在每個掃描周期內進行一次判斷H_dis和V_dis,根據庫位號的不同,堆垛機在水平方向和垂直方向上的前進距離不同,只有當H_dis和V_dis同時為0時,才能判斷堆垛機到達指定位置。
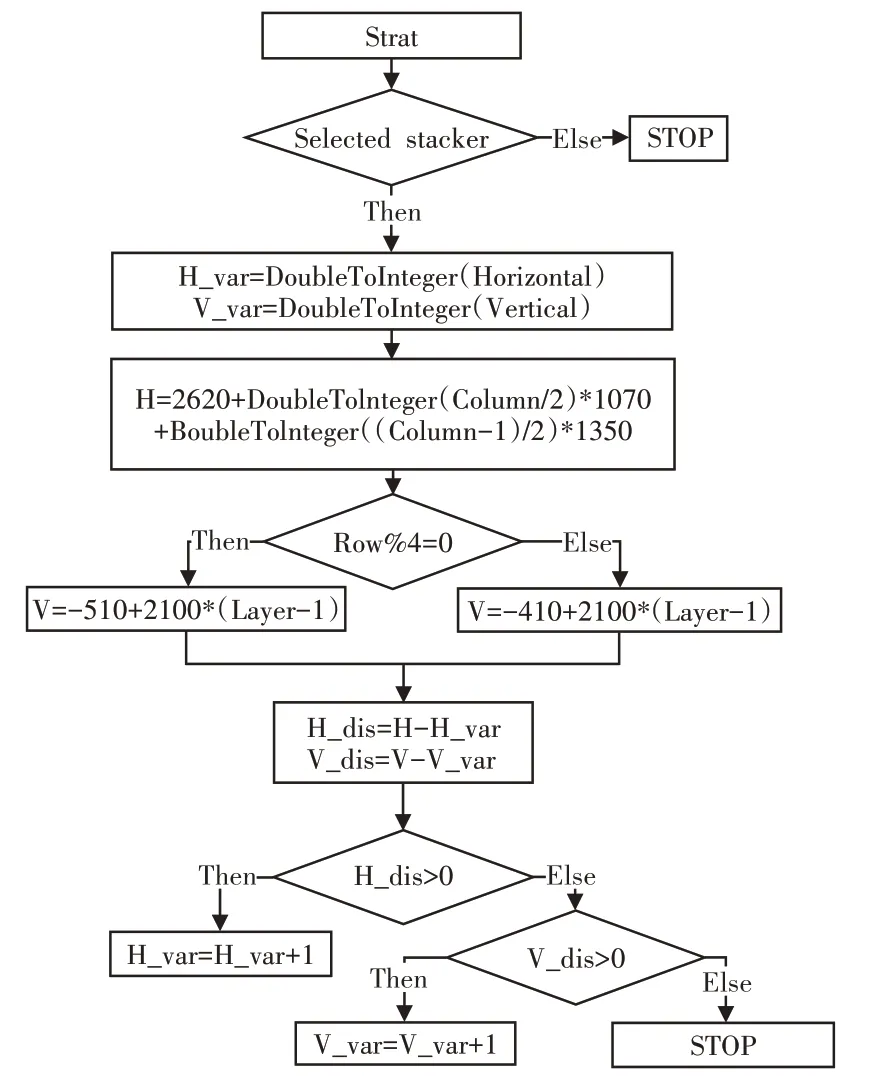
圖7 庫位尋址邏輯圖Fig.7 Library Bit Addressing Logic Diagram
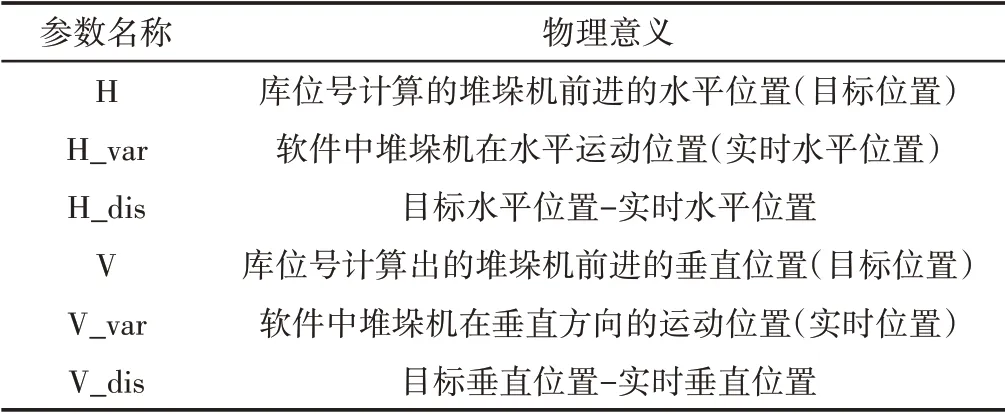
表2 3DE中變量參數的設置Tab.2 Settings of Variable Parameters in 3DExperience
3.6 PLC虛擬調試實驗
為實現外界PLC與3DE的實時通訊,需要在3DE軟件和OPC上設置相應的I∕O接口,如表3所示。項目目標是通過在PLC上輸入堆垛機的層、排和列,堆垛機可以在軟件中自動尋找到相應的庫位并存放貨物,因此在PLC中需要設置控制庫位號的相關I∕O參數,其類型為Output。對應的在軟件中需要設置相應的輸入接口實現硬件PLC與軟件3DE的通訊。將OPC設置的輸出I∕O 導入3DE的邏輯控制器中,通過3DE的I∕O映射連接將相關接口一一對應,如圖8所示。我院的無紡布生產線立庫入庫部分實體與數字化模型,通過PLC程序控制可以將來料成品無紡布放入指定的庫位,同時仿真驗證了入庫流程有無信號點的邏輯錯誤,如圖9所示。
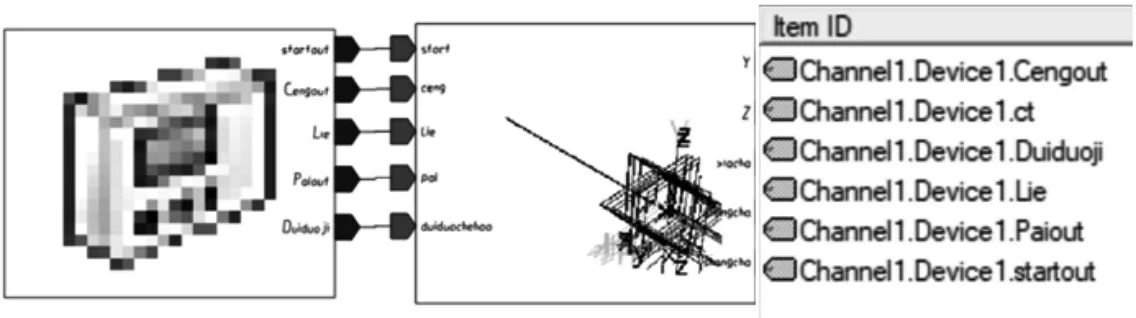
圖8 3DE與PLC連接設置Fig.8 Connection Settings Between 3DE and PLC
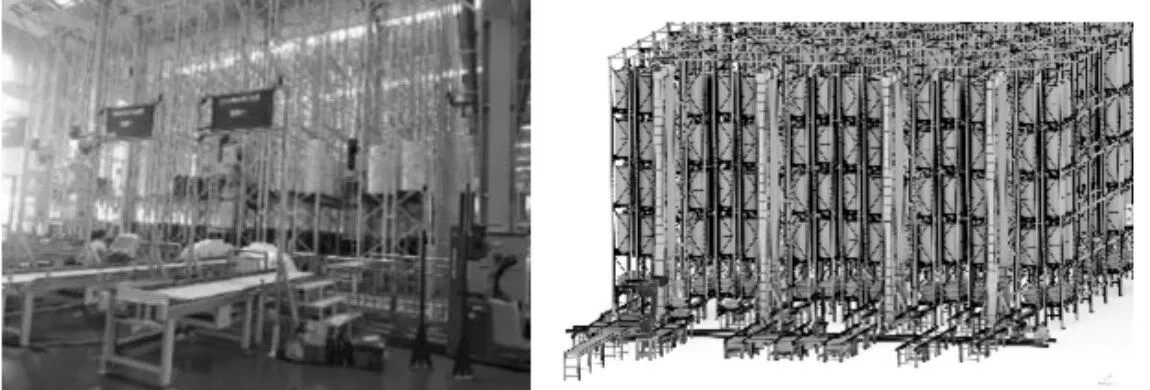
圖9 立體倉庫入庫系統實體與數字化模型Fig.9 Solid and Digital Model of Stereo Storage System
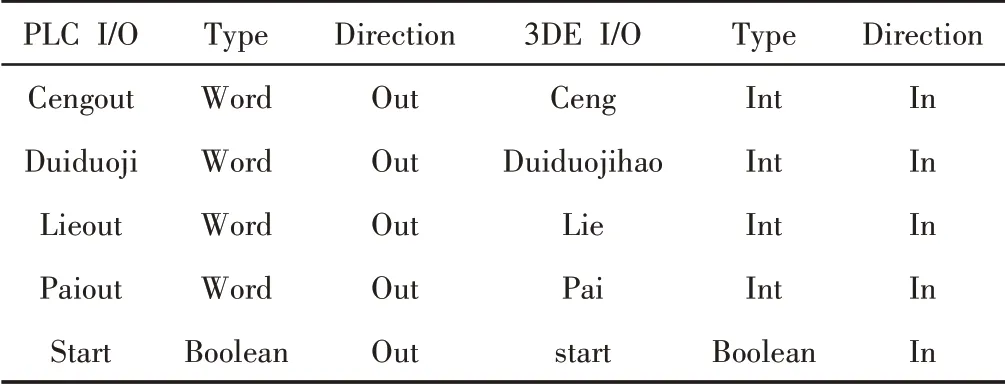
表3 3DE與PLC接口設置Tab.3 Interface Settings Between 3DE and PLC
4 基于GA-PSO的堆垛機軌跡優化
堆垛機作為智能倉儲入庫部分的重中之重設備,其運行中的路徑過程選擇對倉儲的執行效率起到了關鍵作用,因此對堆垛機在運行過程的路徑優化,對整個生產過程的節拍和瓶頸分析都十分有必要。這里使用了經過PSO優化的遺傳算法對堆垛機的軌跡運行過程進行優化迭代,同時通過3DE仿真軟件,對優化的路徑進行了虛擬仿真驗證。
4.1 問題建模
堆垛機在實際生產過程中是批次取貨,如圖10所示。
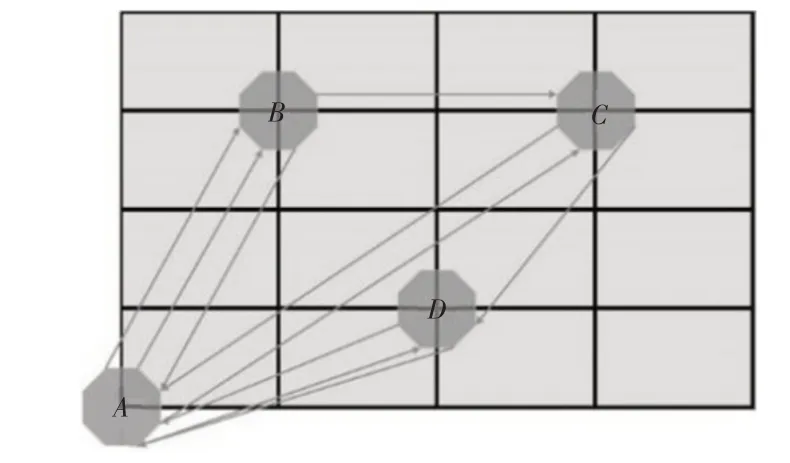
圖10 堆垛機多條指令作業路徑圖Fig.10 Multi-Instruction Operation Path Diagram of Stacker
以3條指令為例,由圖10可知,堆垛機的批次作業流程。
圖中A點表示原點,以三條庫位指令為例,首先堆垛機從原點A運行到B點取出載貨托盤并返回A點,然后取出貨物后,從A點將空的托盤運送回至原貨格B點,放回托盤后不回原點A,繼續尋找下一個庫位C點,并將C點的貨物運送回原點A,如此反復直到取完所有貨物。
可以總結出堆垛機在運行過程中滿足下式:

式中:n—運行庫位指令數;T—堆垛機的總運行時間;T0,i和Ti,0—堆垛機從原點到每個指定庫位的運行和返回時間;Tn,0—完成批次任務后返回原點所用的時間。值根據任務數量值是確定的,而這一部分是一個典型的旅行商(Travelling Salesman Problem,TSP)模型問題,因此以構建遺傳算法的適應度函數。
4.2 GA-PSO調度優化
傳統的遺傳算法收斂速度慢,容易陷入局部最優,而粒子群算法由于其全局搜索能力強,參數更新快,能較好的彌補遺傳算法的不足。如圖11所示,針對堆垛機軌跡的優化問題,首先對實際問題進行抽象建模,對每個庫位號進行編碼操作,然后隨機初始種群和粒子狀態,并計算適應度函數,為了讓適應度函數達到局部最優值更新粒子的速度和位置確定迭代的方向,并通過交叉和變異操作,最后進行全局極值的尋找。為了驗證軌跡優化算法的可行性,現以我院的立體倉庫作為研究對象。貨格的規格為(2300×890×1730)mm,整個立庫長70m,寬21m。堆垛機的速度為5m∕s,首先對立庫的貨格進行編碼,如圖12所示。
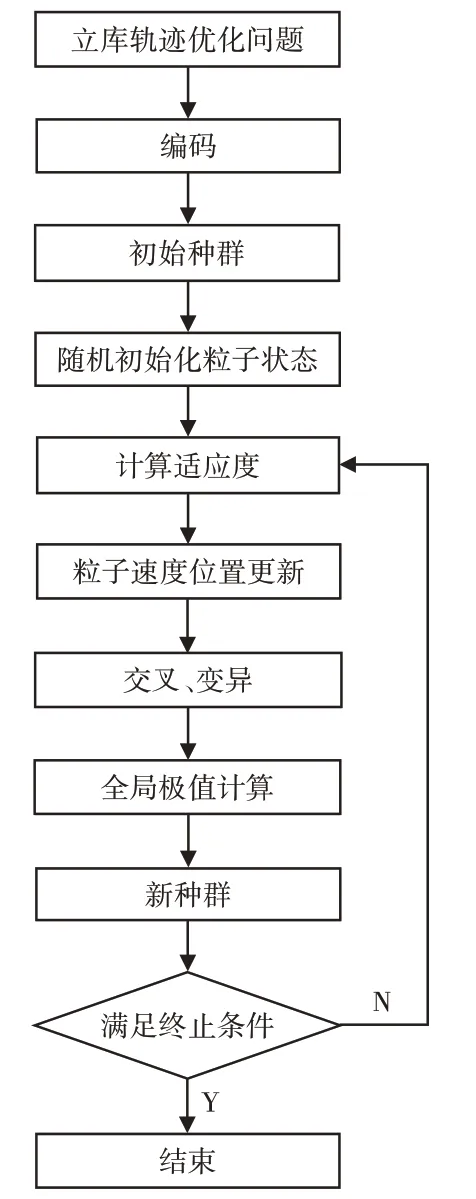
圖11 堆垛機GA-PSO軌跡優化流程Fig.11 GA-PSO Trajectory Optimization Process of Stacker
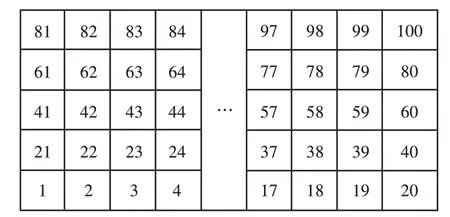
圖12 立庫貨格編碼Fig.12 Stereo Storage Lattice Coding
隨機選出了二十個庫位號進行取貨構建任務表,如表4 所示。由于是批次作業任務,因此針對該批次任務,堆垛機的取貨順序無先后之分,但不同的取貨軌跡具有不同的運行距離,因此需要通過GA-PSO 算法來尋找出最短的軌跡路徑。分別利用GA-PSO 與GA 算法優化堆垛機多任務的任務軌跡,如圖13 所示。其中,慣性權重w=0.5,加速度因子C1=1.5,C2=2.0。兩種算法選取的起點任務和終點任務不同,因此雖然都是最短優化路徑,GA-PSO 優化的最短軌跡路徑為132.4m,GA 優化的路徑為140m。混合算法具有更短的路徑軌跡。
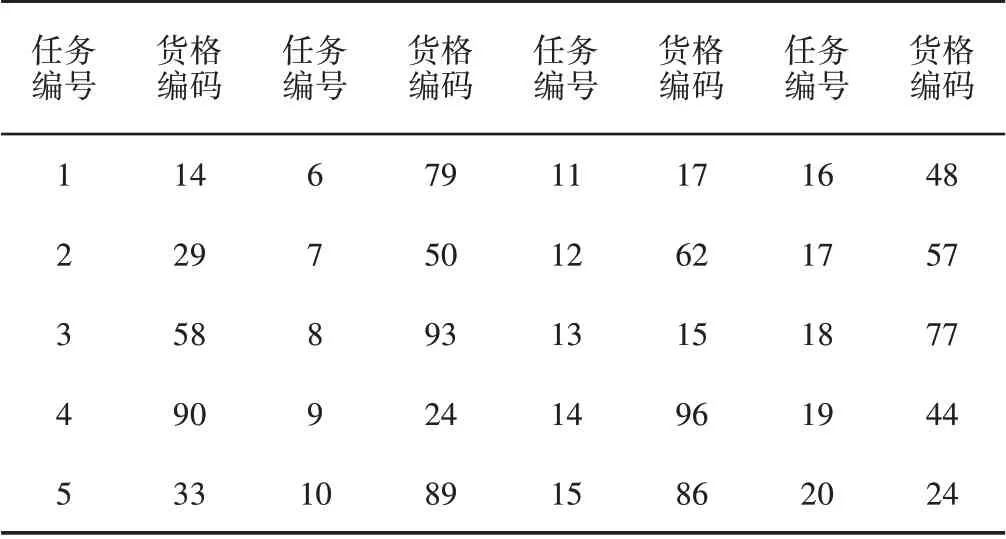
表4 堆垛機取貨任務表Tab.4 Task Sheet for Pick-up of Stackers
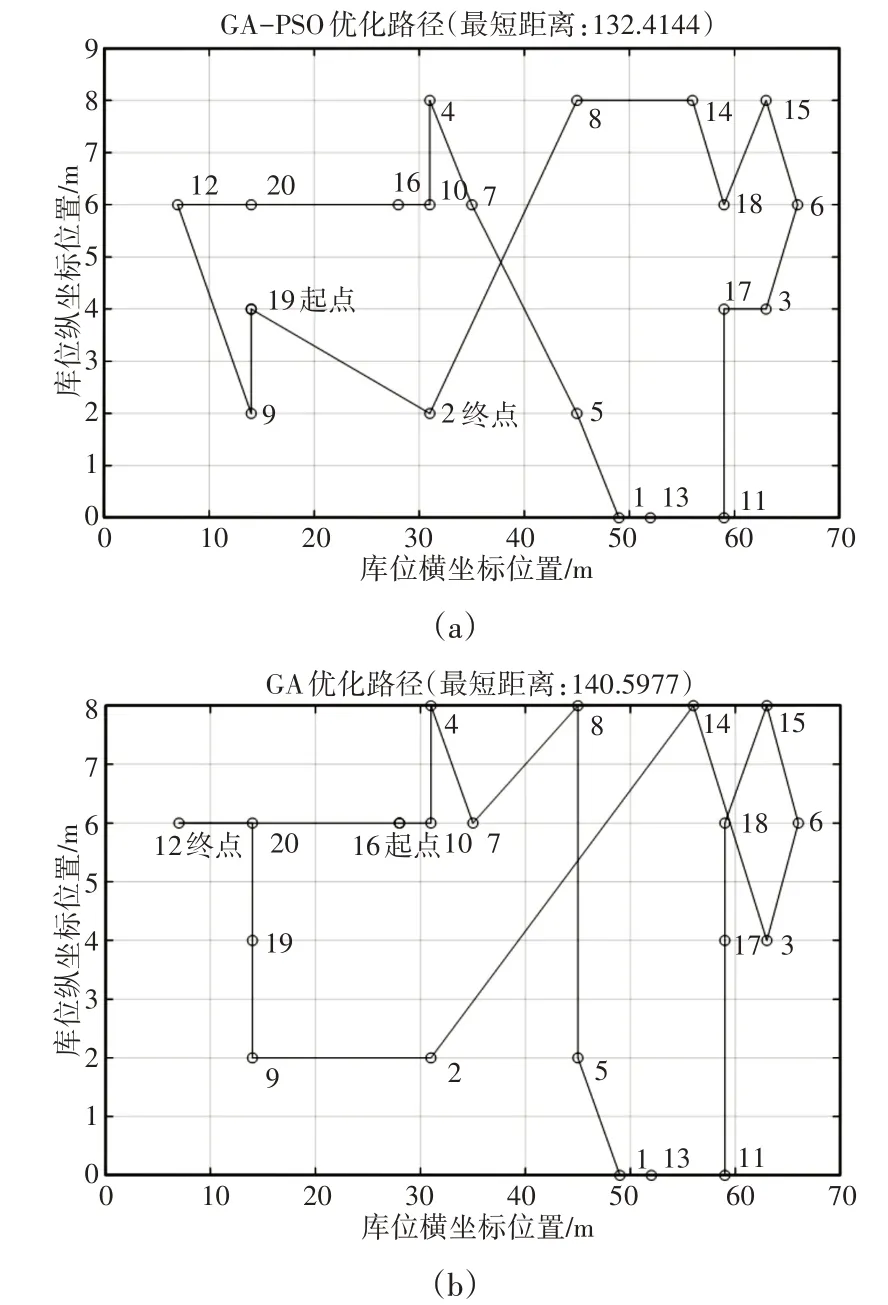
圖13 GA-PSO與GA軌跡優化圖Fig.13 GA-PSO and GA Trajectory Optimization Diagram
迭代200次的優化過程,GA-PSO算法迭代過程具有較快的收斂速度,如圖14所示。將優化路徑的軌跡點導入3DE進行運動仿真,仿真結果顯示GA 優化的批次任務運行時間為1082s,GA-PSO運行的時間為1052s。經過GA-PSO軌跡優化的方法縮短了堆垛機的運行時間,提高了整個倉儲環節的輸送效率。

圖14 GA-PSO與GA迭代收斂比較Fig.14 Comparison of Convergence of GA-PSO and GA Iterations
5 結論
首先通過3DE仿真平臺構建我院立體倉庫物流輸送系統,并通過OPC 與PLC 建立通訊協議,對立庫進行虛擬調試。同時針對立庫作業的調度優化問題,通過GA-PSO混合算法,優化批次作業的任務軌跡,仿真實驗結果表明:
(1)通過3DE 仿真虛擬調試技術,實現了在項目構建的早期階段對立庫PLC 程序的邏輯驗證,縮短了現場工作人員的調試時間。
(2)針對堆垛機了路徑優化問題,GA-PSO 混合算法優化了批次作業任務軌跡,相較于傳統GA算法,混合算法能具有更短的路徑優化軌跡。通過3DE仿真任務軌跡發現,GA-PSO混合算法具有更短的運行時間,從而提高了整個倉儲的運行效率。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年12期)2018-08-01 00:47:44
制造技術與機床(2017年6期)2018-01-19 02:41:21
電子制作(2017年19期)2017-02-02 07:08:38
工業設計(2016年12期)2016-04-16 02:52:00
