礦用外骨骼助力機器人的結構設計與性能分析
2022-08-19 11:01:52劉澤鵬趙利平梁義維
機械設計與制造 2022年8期
關鍵詞:助力
劉澤鵬,趙利平,梁義維
(太原理工大學機械與運載工程學院,山西 太原 030024)
1 引言
我國是煤炭生產和消費第一大國,目前煤礦機器人的應用已日趨普遍,主要包含生產機器人、救災機器人和服務機器人[1],煤礦已基本實現工作面的機械化生產,但在井下仍存在諸多工況不適合大型設備的使用,如復雜巷道維修、小型硐室掘進和打幫錨桿等,人工體力勞動依然是不可替代的。而針對這些井下零散工種的作業機器人尚未有實質性推進[2],市場上也沒有相關的用于助力人體的礦用機器人出現。外骨骼機器人可以提高人們在行走耐久性、負重能力等特定方面的體能[3]。因此一款用于輔助煤礦工人作業的外骨骼機器人具有重要意義。
目前國內外眾多研究機構均已開展外骨骼機器人的研究工作。如文獻[4-6]進行了相關研究。這些外骨骼機器人采用液壓或電機驅動,但都存在續航不足,活動受限的問題。
針對煤礦井下的復雜環境和實際工況需求,提出一種用于輔助工人移動操作重型風鎬等機具的外骨骼助力機器人,將造成人員疲勞的主要作業動作配置成主動驅動,采用使用方便的氣動或液壓傳動來解決動力問題。
其他機構配置非主動機構,從而使機構得以輕量化,同時也避免了復雜的傳感系統和控制系統,成為一種更加實用化的外骨骼小型機具的可移動作業平臺。
2 結構設計
這里設計的外骨骼主體可分為上肢和下肢兩部分。上肢的助力升降平臺用于承載重型機具實現三維空間內的移動定位,由液壓驅動,采用液壓助力系統控制。下肢承重機械腿采用仿生設計,模擬人體下肢生物結構,設計有髖關節、膝關節和踝關節,可以實現機械腿與人體下肢的同步運動。關節處設計有關節運動幅度限位裝置,防止運動幅度過大造成人體生物組織的損傷。外骨骼機器人模型,如圖1所示。主要技術參數,如表1所示。
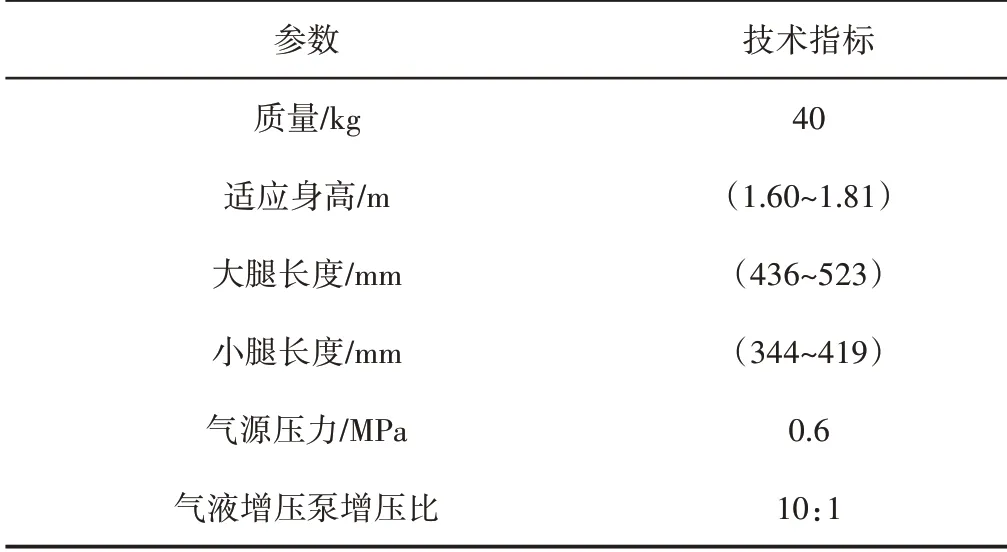
表1 外骨骼技術參數Tab.1 Exoskeleton Technical Parameters
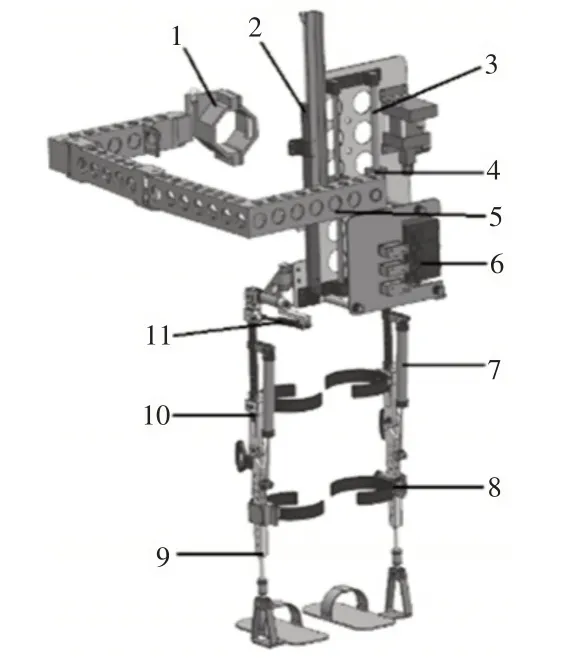
圖1 外骨骼模型Fig.1 Exoskeleton Model
上肢助力升降平臺包括背部直線升降導軌和水平面內移動的承重機械臂。背部導軌由兩根平行的光軸豎直安裝,機械臂端部設計有安裝在導軌上的滑塊結構,在背部助力油缸的推動下,可沿著導軌直線滑動。機械臂升降高度根據人體工程學設計,符合人體上肢升舉最佳操作空間。水平機械臂是平面三連桿機構,連桿通過空間規劃設置合理長度,可以實現人體雙手操作舒適范圍的全覆蓋。
下肢機械腿共有10 個自由度,每條腿5 個自由度(左右腿對稱分布),下面以左腿為例,自由度布置為髖關節3 個(前屈∕后伸(110~-15)°,內收∕外展(-30~30)°,旋內∕旋外(0~40)°),膝關節1 個(伸∕屈(0~130)°),踝關節1 個(背屈∕跖屈(-20~20)°)。在人體直立行走和登臺階的過程中,膝關節所需要的驅動功率是最大的[7],因此在膝關節處設計有助力液壓缸。髖關節處設計有被動助力器,利用彈簧儲能特性提供助力。在大腿連桿和小腿連桿處設計有長度調節裝置,可以根據不同身高調節合適的長度。
該外骨骼上肢升降系統和下肢關節助力系統都是一種位置伺服系統。人體動作位移作為控制開關輸入信號,控制作動器跟隨人體動作,整個人機系統形成了閉合機械反饋控制系統。液壓回路由氣液增壓泵供能,集成在背部,整個系統只需外接氣源作為驅動。
3 人機運動學與動力學仿真
以平地搬運行走為例,將人體模型和樣機模型導入ADAMS中進行仿真分析。外骨骼模型的各部件材料設為鋼,經輕量化設計后質量為40kg,氣動機具質量為30kg。人體模型身高175mm,體重75kg。在人體模型和外骨骼模型的裝配連接處設置接觸,在人體腳底與地面間、外骨骼腳底與地面間設置接觸和摩擦。將一個完整步態周期的CGA數據導入ADAMS中作為下肢各關節的驅動函數,因為下肢的運動是相對稱的且相差0.5個周期,故以下討論皆以左腿為例。左腿關節驅動角度曲線,如圖2所示。設置仿真時間為1s,仿真步數為1000,進行運動學和動力學仿真。仿真動畫中模型從左腳落地開始到左腳再次落地結束,人機模型可以平穩順暢的行走,如圖3所示。
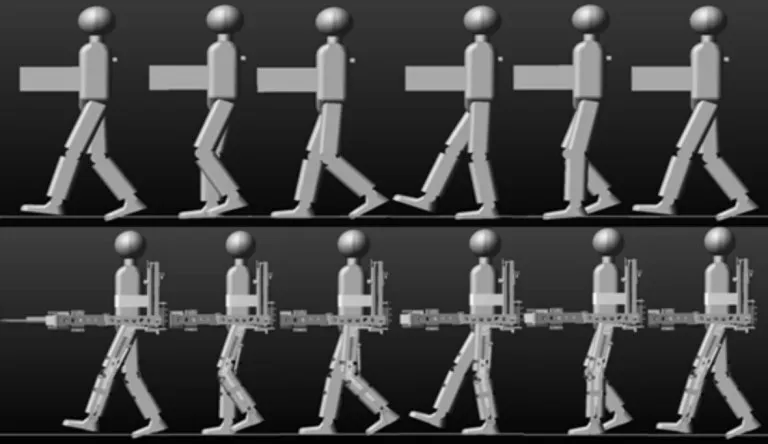
圖3 步態仿真動畫Fig.3 Gait Simulation Animation
人體進行任何負重動作受到的力最終都會通過下肢傳遞到地面,因此腳底壓力可以作為評價外骨骼助力效果的指標。一個步態周期的單腿腳底壓力變化曲線,如圖4所示。與驅動曲線同步,在(0~0.6)s內為支撐期,(0.6~1)s內為擺動期。由圖4可知,未穿戴外骨骼由人體直接負重時,壓力曲線在支撐期波動較大,在(0~0.1)s和(0.5~0.6)s期間,下肢處于雙腳支撐期,兩腳的支撐狀態發生轉變,腳底在接觸地面和離開地面時,會產生沖擊和壓力突變,最大值為1512.51N。在單腳支撐期內(0.1~0.5)s壓力變化幅度較小,壓力平均值為1057.54N。穿戴外骨骼后,在(0~0.1)s和(0.5~0.6)s期間壓力的波動明顯減小,曲線更加平緩,支撐期壓力更穩定,在(0.1~0.5)s內,壓力平均值為858.44N。穿戴外骨骼后支撐期腳底的平均壓力降低199.10N,即外骨骼幫助人體減小了18.83%的腳底負重,此外還有效減小了雙腿交換時的沖擊。
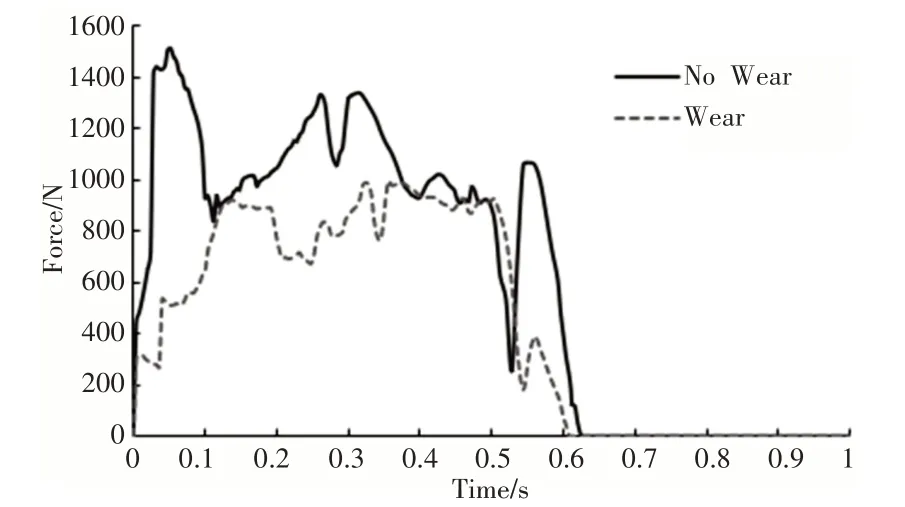
圖4 腳底壓力仿真曲線Fig.4 Simulation Curve of Foot Pressure
外骨骼作用于人體的交互力主要包括背板對人體背部的作用力和下肢綁腿對腿部的作用力,由于綁腿與人體為柔性接觸,機械腿理想的認為與人體腿部貼合且無延遲的跟隨腿部動作,故忽略綁腿的作用力。人體背部受力曲線,如圖5所示。
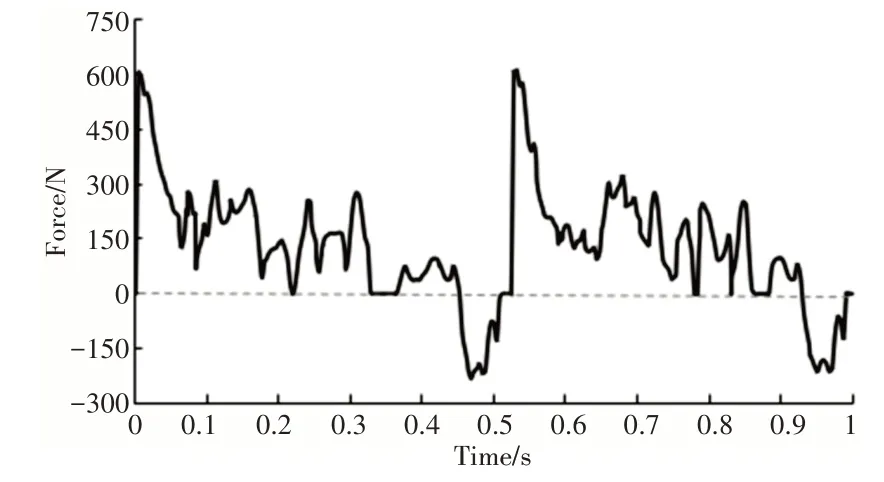
圖5 人體背部受力仿真曲線Fig.5 Back Stress Simulation Curve of Human Body
由圖5 可知,外骨骼對人體背部的力主要為壓力(數值為正),在0s和0.5s時,由于兩腿支撐狀態的轉換,背部壓力會產生突變,最大值為610N。在整個步態周期內,壓力平均值為124.03N。背部的壓力需要人體腰部肌肉出力來平衡,雖然數值較小,但是需要肌肉持續發力,長時間會造成疲勞,影響穿戴的舒適性。因此背部壓力是評價穿戴舒適性的重要指標,為后期的改進提供了參考。
4 物理樣機試驗
為驗證仿真結果的正確性和人機穿戴的實際效果,對實物樣機進行試驗,如圖6所示。測試人員身高176cm,體重75kg。在外骨骼樣機的背部靠板和腳底板安裝有應變片式壓力傳感器,信號由示波器采集,將數據導出,由于兩次步態周期時間不同,無法直接比較,為方便觀察,將橫坐標處理為一個完整步態的百分比數值,如圖7所示。由圖7可知,穿戴外骨骼后下肢的支撐期時間占比減小,即擺動期時間占比增大,主要是因為機械腿的跟隨性較差,相對于人體動作會有滯后,增加了擺動期的時間。此外兩條曲線的趨勢基本一致,區別在于穿戴外骨骼后相較人體直接負重在數值上有明顯下降。人體直接負重的單腳支撐期壓力均值為1082.48N,穿戴外骨骼后單腳支撐期壓力均值為876.01N。即穿戴外骨骼機器人可以幫助人體減小19.07%的腳底壓力,這與仿真結果基本相同。

圖6 樣機試驗Fig.6 Prototype Experiment
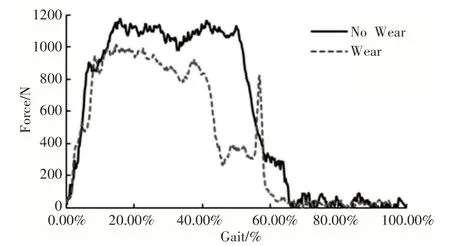
圖7 腳底壓力試驗曲線Fig.7 Pressure Test Curve of Sole
人體背部受力曲線軌跡與仿真結果基本吻合,如圖8所示。最大值為615.49N,步態周期內平均值為143.37N。

圖8 背部壓力試驗曲線Fig.8 Back Pressure Test Curve
背部受到壓力作用會影響背部肌肉的發力情況,人體搬運重物也與背部肌肉的發力密切相關,因此背部肌肉的活動狀態也可以作為評價外骨骼穿戴效果的指標。肌電信號能夠反應肌肉的活躍程度[8],人體背部發力涉及多組肌肉的協同作用,選取活躍程度較大的豎脊肌為測試對象。采用表面肌電信號采集系統測量肌肉的肌電信號,由藍牙模塊將測試數據傳輸至電腦端,得肌電信號功率曲線,如圖9所示。圖9中兩條肌電信號功率曲線對比,可以明顯看出,外骨骼對人體背部的作用力雖然會使背部肌肉長時間出力,但是仍然比人體直接負重時肌肉的運動功率小,功率均值減小約60%。
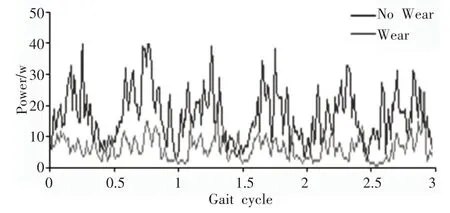
圖9 豎脊肌肌電信號功率曲線Fig.9 Vertebral Muscle SEMG Signal Power Curve
5 結論
(1)外骨骼的結構設計合理,動作靈活順暢,能與人體的運動貼合。(2)外骨骼可以協助人體搬運重物并進行正常步態行走,可以有效減小人體下肢約19%的負重。(3)外骨骼本身可以平衡機具部分重量,減小背部肌肉約60%的活動強度,但背部肌肉仍需出力,影響人體的舒適性,這為之后的研究和改進工作奠定了基礎。(4)通過樣機試驗表明外骨骼基本實現助力效果,但在機構的自平衡性和下肢助力器的跟隨性方面還有待進一步提高。
猜你喜歡
中學生數理化·七年級數學人教版(2024年5期)2024-05-08 02:36:32
今日農業(2022年16期)2022-11-09 23:18:44
英語世界(2022年9期)2022-10-18 01:11:18
今日農業(2021年16期)2021-11-26 06:05:34
科學大眾(2021年9期)2021-07-16 07:02:40
海峽科技與產業(2021年1期)2021-05-22 01:27:00
中學生數理化(高中版.高考理化)(2021年2期)2021-03-19 08:52:46
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
學苑創造·A版(2019年6期)2019-07-11 01:07:39
