柔性機(jī)械臂振動與能量最小的多目標(biāo)軌跡優(yōu)化
2022-08-19 11:01:42劉勇,王騰,杜喆
機(jī)械設(shè)計與制造 2022年8期
劉 勇,王 騰,杜 喆
(1.合肥工業(yè)大學(xué)機(jī)械工程學(xué)院,安徽 合肥 230009;2.合肥工業(yè)大學(xué)宣城校區(qū),安徽 宣城 242000)
1 引言
與傳統(tǒng)的剛性機(jī)械臂相比,柔性機(jī)械臂重量輕、載荷大、可操作性強(qiáng)。但由于柔性連桿的剛度低,柔性機(jī)械臂在運(yùn)動過程中的振動會導(dǎo)致機(jī)械臂末端定位精度下降,不僅對機(jī)械臂操作精度產(chǎn)生負(fù)面影響,還會導(dǎo)致運(yùn)行不穩(wěn)定甚至機(jī)械臂損壞。因此,需要對柔性機(jī)械臂進(jìn)行振動抑制。
為抑制柔性臂的殘余振動,文獻(xiàn)[1]提出了采用粒子群算法優(yōu)化插值點位置增量和3次樣條插值擬合優(yōu)化后的軌跡函數(shù)以消除殘余振動的方法。文獻(xiàn)[2]設(shè)計了邊界控制策略以驅(qū)動機(jī)械臂遵循給點軌跡并同時消除振動。文獻(xiàn)[3]以驅(qū)動力矩為輸入,末端變形和轉(zhuǎn)角為輸出建立了柔性機(jī)械臂的控制模型,并采用線性二次型(LQR)算法進(jìn)行振動抑制。文獻(xiàn)[4]提出了一種徑向基(RBF)神經(jīng)網(wǎng)絡(luò),使得存在輸入死區(qū)的柔性機(jī)械臂的振動得到抑制。然而,以上研究對象均是單連桿柔性臂。針對二自由度平面柔性機(jī)械臂,文獻(xiàn)[5]利用模糊邏輯控制器和神經(jīng)控制器來產(chǎn)生控制動作,主動抑制振動。文獻(xiàn)[6]通過機(jī)械臂關(guān)節(jié)角度的測量來進(jìn)行軌跡跟蹤,然后利用自適應(yīng)控制神經(jīng)網(wǎng)絡(luò),使得反饋參數(shù)線性化以消除不確定性振動。文獻(xiàn)[7]設(shè)計了一種神經(jīng)網(wǎng)絡(luò)以應(yīng)用于力矩控制,通過軌跡跟蹤實現(xiàn)振動的抑制。對于給定的操作任務(wù),當(dāng)柔性機(jī)械臂運(yùn)行軌跡不同時,其振動狀態(tài)和能量消耗相差較大。
然而上述文獻(xiàn)只是著眼于振動抑制,優(yōu)化指標(biāo)中只考慮到了柔性振動能量,而并未研究關(guān)節(jié)軌跡對機(jī)械臂振動狀態(tài)的影響。文獻(xiàn)[8]利用遺傳算法求解了柔性機(jī)械臂振動能量最優(yōu)軌跡,但是在處理運(yùn)動過程中的彈性振動能量和殘余振動能量時,采用的是加權(quán)方法,實質(zhì)上考慮的仍是殘余振動優(yōu)化。為此,對柔性機(jī)械臂多目標(biāo)軌跡優(yōu)化問題進(jìn)行研究,采用多目標(biāo)粒子群(MOPSO)算法進(jìn)行多目標(biāo)優(yōu)化,同時利用RBF神經(jīng)網(wǎng)絡(luò)對柔性機(jī)械臂逆動力學(xué)方程進(jìn)行擬合[9],以得到連續(xù)平滑的關(guān)節(jié)力矩,便于進(jìn)一步施加機(jī)械臂振動抑制控制策略,提高柔性機(jī)械臂操作的穩(wěn)定性和準(zhǔn)確性。
2 柔性機(jī)械臂動力學(xué)建模
二自由度柔性機(jī)械臂,如圖1所示。兩根柔性臂桿均為歐拉梁,并忽略重力影響。由于關(guān)節(jié)質(zhì)量較大,因此第一根柔性臂桿采用了簡支梁模型,而第二根桿則采用懸臂梁模型。
采用拉格朗日動力學(xué)方程與假設(shè)模態(tài)法對柔性機(jī)械臂進(jìn)行動力學(xué)建模,利用經(jīng)典的瑞利-里茨法描述物體上各點的變形向量,自由振動的表達(dá)式為:

分別取簡支梁和懸臂梁的前兩階模態(tài),則前兩根臂桿的橫向位移可以表示為:
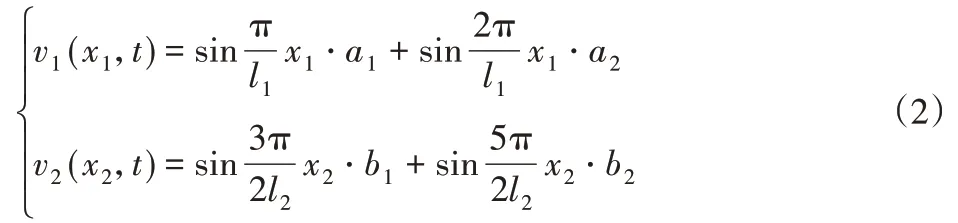
式中:a,b—只與時間有關(guān)的變量。
式中:q=[θ1,a1,a2,θ2,b1,b2]T—廣義坐標(biāo)。
U代表系統(tǒng)彈性勢能,對于二自由度柔性機(jī)械臂有:

將式(2)代入式(4),則有:

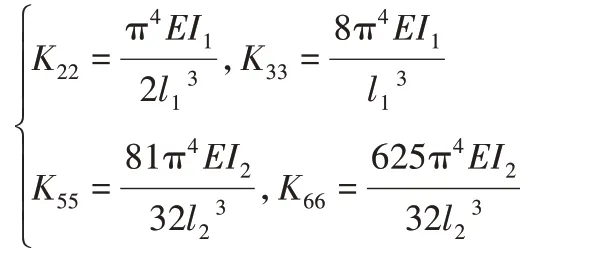
K∈?6×6,式中非零項為:

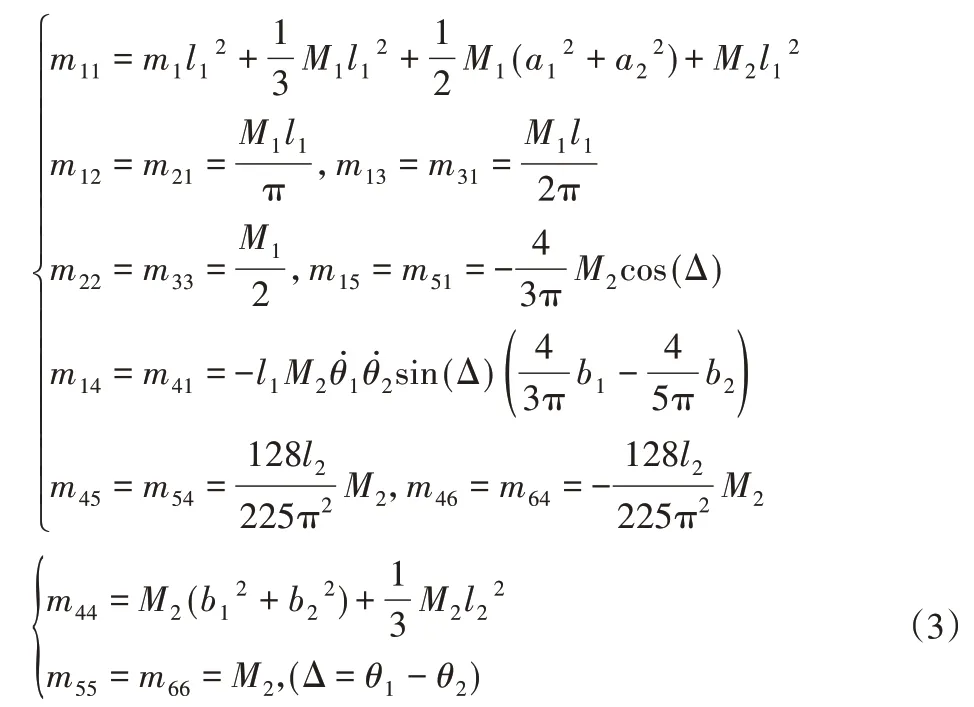
式中:M—質(zhì)量矩陣,其具體元素,如式(3)所示;
C—耦合矩陣,可根據(jù)動力學(xué)方程求得。
3 柔性機(jī)械臂多目標(biāo)軌跡優(yōu)化
3.1 采用MOPSO求解理想軌跡
以柔性機(jī)械臂運(yùn)動過程中的振動與能量消耗作為優(yōu)化目標(biāo),采用MOPSO算法對兩個優(yōu)化目標(biāo)同時進(jìn)行優(yōu)化。
對于運(yùn)動過程中的振動,可以用臂桿2末端最大撓度的絕對值來表征:

而能量的優(yōu)化函數(shù)為:

為了獲得連續(xù)光滑的關(guān)節(jié)角度、角速度和角加速度,并且考慮關(guān)節(jié)機(jī)械限位問題,采用正弦七次多項式的方法對關(guān)節(jié)1和關(guān)節(jié)2的角度進(jìn)行插值遍歷,以此求解理想關(guān)節(jié)軌跡。由此,可以建立二自由度等效剛性機(jī)械臂的關(guān)節(jié)角表達(dá)式:
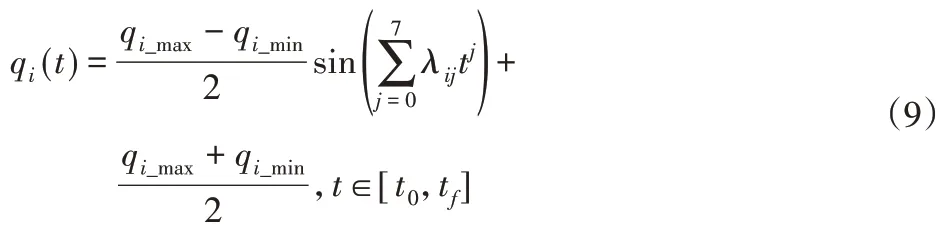
式中:qi—關(guān)節(jié)i的關(guān)節(jié)角;λ—多項式系數(shù);t0,tf—初始和終止時刻。由初始和終止時刻的約束條件可知:

式中:qini,qend—起始和終止關(guān)節(jié)角。
將約束條件式(10)代入式(9)中,λi0,λi1,…,λi5可由λi6,λi7表示,則可定義決策向量λ =[λ16,λ17,λ26,λ27]。各關(guān)節(jié)的角度、角速度和角加速度均可由λ求得。

式中:V[k],P[k]—粒子k的飛行速度和其在種群中的位置;
c1,c2—學(xué)習(xí)因子;
r1,r2—在[ 0,1]上均勻分布的隨機(jī)數(shù);
R[h]—外部檔案中粒子的位置;
χ= 2∕( | 2 -φ-φ(φ- 4) |)—收斂因子;φ=c1+c2;
pbest—粒子自身經(jīng)歷過的最佳位置。
基于上述多目標(biāo)軌跡優(yōu)化得到理想關(guān)節(jié)軌跡后,利用傳統(tǒng)近似方法求解柔性參考軌跡:利用理想軌跡求得剛性力矩。再用剛性力矩求出對應(yīng)的柔性變量。再利用理想軌跡與柔性變量求解柔性參考力矩。最后,將柔性參考力矩代入柔性機(jī)械臂動力學(xué)方程,即可求得機(jī)械臂的柔性參考軌跡和實際柔性變量。
3.2 柔性機(jī)械臂最優(yōu)軌跡求解
用近似法求得的柔性參考力矩所造成的關(guān)節(jié)角度誤差較小。但是,關(guān)節(jié)力矩的震蕩明顯,不利于實際工程應(yīng)用,同時也會對進(jìn)一步的機(jī)械臂振動抑制控制造成困難。針對上述問題,進(jìn)一步采用RBF神經(jīng)網(wǎng)絡(luò)對柔性機(jī)械臂逆動力學(xué)方程進(jìn)行擬合,即輸入期望理想軌跡后,通過RBF神經(jīng)網(wǎng)絡(luò)直接求得實際關(guān)節(jié)力矩[9]。
所采用的RBF神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),如圖2所示。其中,Q1,Q2代表關(guān)節(jié)1和關(guān)節(jié)2的期望理想軌跡,τ1,τ2代表關(guān)節(jié)1和關(guān)節(jié)2的實際關(guān)節(jié)力矩。wij(j= 1,2)代表權(quán)重系數(shù)。是高斯類型函數(shù),ci為第i個徑向基函數(shù)的中心,σ為徑向基函數(shù)的寬度。具體的算法流程,如圖3所示。
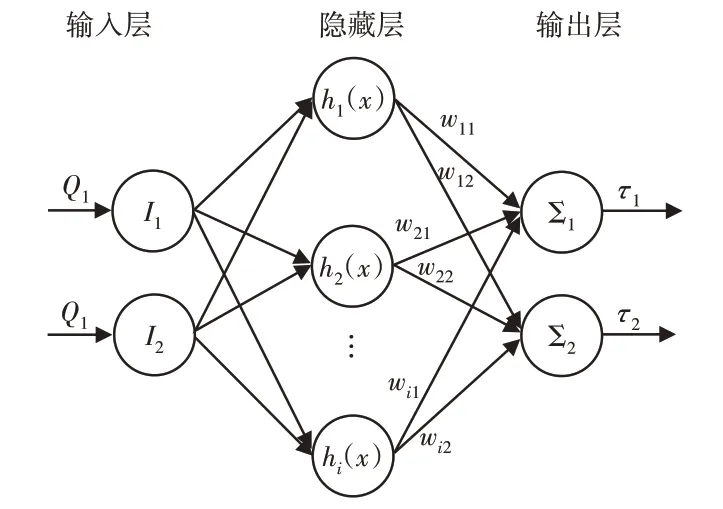
圖2 RBF神經(jīng)網(wǎng)絡(luò)模型Fig.2 Model of RBF Neural Network
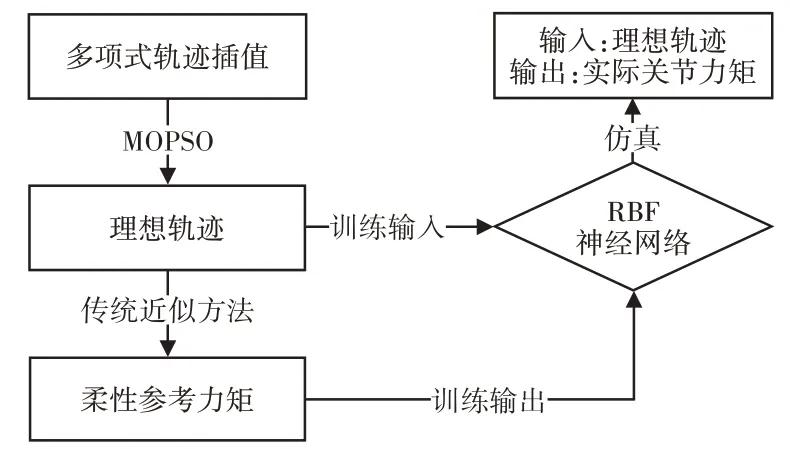
圖3 柔性機(jī)械臂動力學(xué)算法流程Fig.3 Dynamic Algorithm Flow
4 仿真與結(jié)果分析
4.1 參數(shù)設(shè)置與仿真結(jié)果
利用MATLAB 對兩自由度柔性機(jī)械臂進(jìn)行仿真實驗,機(jī)械臂兩個連桿均為柔性連桿,機(jī)械臂相關(guān)的材料、質(zhì)量和幾何特性參數(shù),如表1所示。

表1 二自由度柔性機(jī)械臂參數(shù)Tab.1 Parameters of 2-DOF Flexible Manipulator
機(jī)械臂的初始關(guān)節(jié)角為qini=[ 20°,0°],終止關(guān)節(jié)角為qend=[10°,10°],規(guī) 劃總 時 間tf= 1.5s。 MOPSO 算法 參 數(shù)設(shè) 置為:nλ= 4,[λmin,λmax]=[ -0.1,0.1],種群規(guī)模nP= 250,外部檔案粒子數(shù)nR= 100,最大迭代次數(shù)Imax= 150以及c1=c2= 2.05。
4.2 仿真結(jié)果比較與分析
利用MOPSO求解多目標(biāo)軌跡優(yōu)化問題,得到的Pareto前沿,如圖4所示。振動指標(biāo)最小和能量最小的極端解分別記為非支配解A和非支配解B。
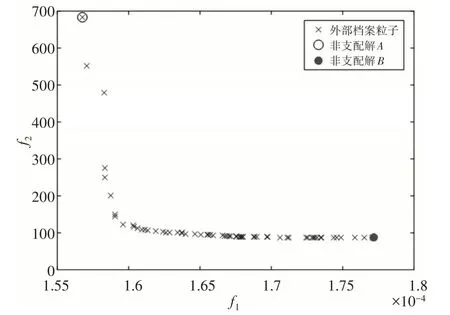
圖4 Pareto前沿Fig.4 Pareto Front
非支配解A和非支配解B的代價函數(shù)值以及對應(yīng)的決策向量,如表2所示。其中,梯形規(guī)劃的參數(shù)設(shè)置為:加速時間和減速時間為0.2s,總時間同樣為1.5s。
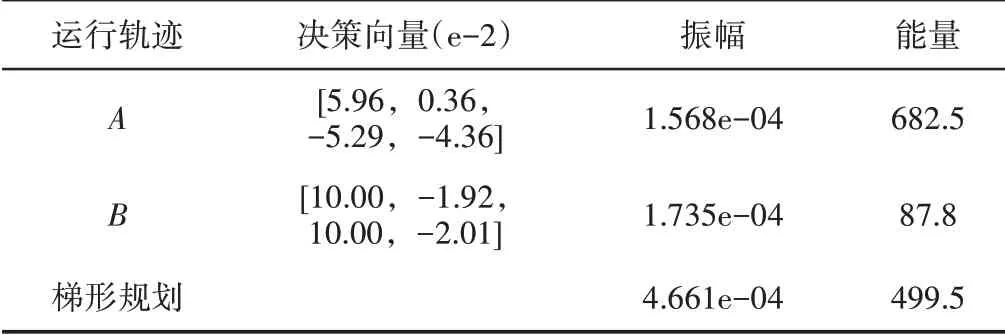
表2 目標(biāo)函數(shù)極端解Tab.2 Extreme Solution of Cost Functions
將兩種非支配解A和B的臂桿2末端撓度變化與傳統(tǒng)梯形規(guī)劃的撓度變化進(jìn)行對比。根據(jù)圖5可知,利用MOPSO算法所得到的兩個極端解的臂桿振動均小于梯形規(guī)劃。且梯形規(guī)劃軌跡消耗能量= 499.50遠(yuǎn)遠(yuǎn)大于兩個非支配解。非支配解A的最大振幅f1A約比非支配解B的振幅f2B大9.63%,但是能量消耗f2A卻比f2B減小了677.36%。可見在振幅相似的情況下,改變多項式的系數(shù)會對能量消耗產(chǎn)生很大的影響。
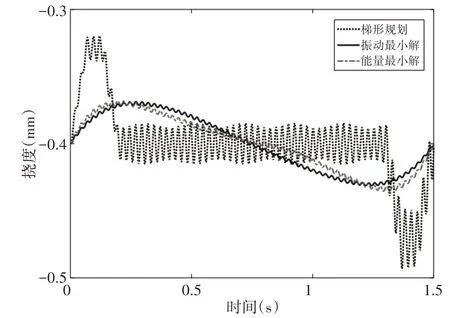
圖5 三種軌跡末端撓度變化對比曲線Fig.5 Comparison of Tip Deflection
利用MATLAB神經(jīng)網(wǎng)絡(luò)工具箱中的newrb函數(shù)訓(xùn)練RBF神經(jīng)網(wǎng)絡(luò),SPREAD值設(shè)置為1。神經(jīng)網(wǎng)絡(luò)訓(xùn)練前后關(guān)節(jié)1和關(guān)節(jié)2的力矩,如圖6所示。可以發(fā)現(xiàn)訓(xùn)練前的力矩變化抖動劇烈,可能會導(dǎo)致關(guān)節(jié)運(yùn)行不平穩(wěn)。然而,通過RBF神經(jīng)網(wǎng)絡(luò)對柔性機(jī)械臂逆動力學(xué)方程進(jìn)行擬合后,關(guān)節(jié)控制力矩變得連續(xù)且平滑。通過RBF神經(jīng)網(wǎng)絡(luò)得到的實際關(guān)節(jié)力矩代入柔性動力學(xué)方程后得到的實際關(guān)節(jié)軌跡,如圖7所示。兩個關(guān)節(jié)的關(guān)節(jié)角均較好的達(dá)到了目標(biāo)要求。機(jī)械臂運(yùn)行終止時,非支配解A關(guān)節(jié)1和關(guān)節(jié)2的實際關(guān)節(jié)軌跡與理想關(guān)節(jié)軌跡的誤差分別為:0.046°,0.069°;而非支配解B的誤差分別為:0.029°,0.017°。關(guān)節(jié)運(yùn)行誤差較小,滿足操作任務(wù)需求,且有利于后續(xù)的軌跡跟蹤控制。此外,圖8 表明,將擬合后的實際關(guān)節(jié)力矩代入柔性機(jī)械臂動力學(xué)方程后,平滑的關(guān)節(jié)驅(qū)動力矩會使得機(jī)械臂的末端振動進(jìn)一步得到抑制。
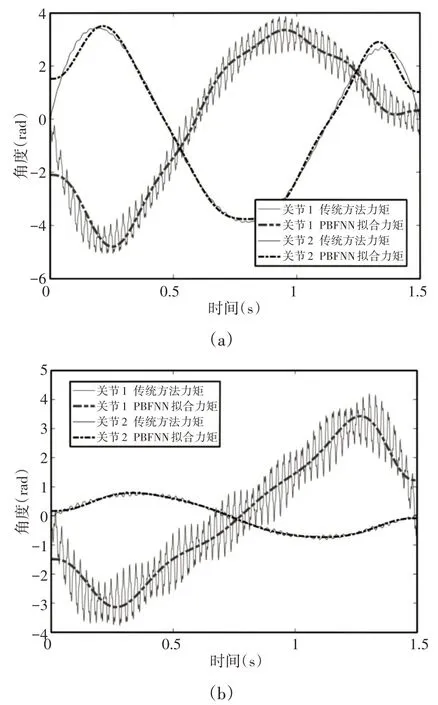
圖6 振動最小解與能量最小解在神經(jīng)網(wǎng)絡(luò)擬合前后的關(guān)節(jié)驅(qū)動力矩對比曲線Fig.6 Comparison Curve of Joint Driving Torque between Minimum Solutions of Vibration and Energy before and after Neural Network Fitting
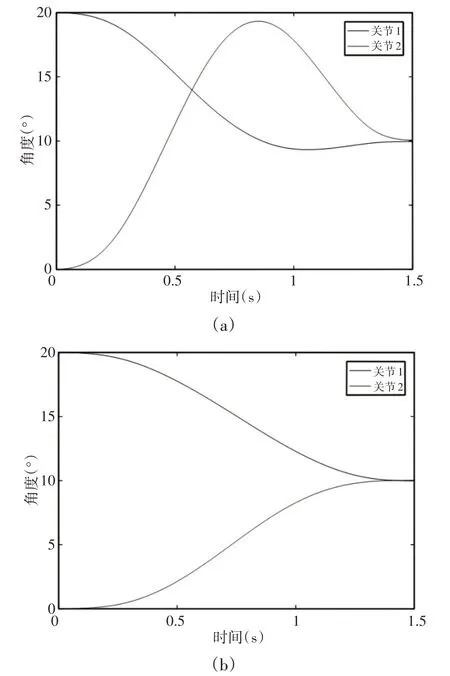
圖7 振動最小解與能量最小解在神經(jīng)網(wǎng)絡(luò)擬合后關(guān)節(jié)軌跡對比曲線Fig.7 Joint Trajectories of Minimum Solutions of Vibration and Energy Fitted by Neural Network
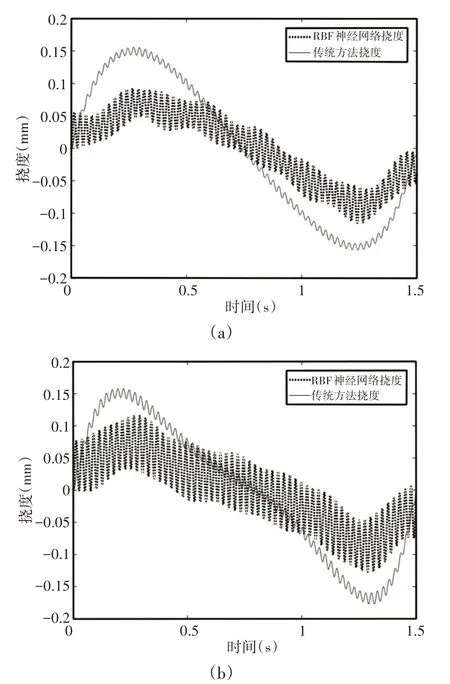
圖8 振動最小解與能量最小解在神經(jīng)網(wǎng)絡(luò)擬合前后的末端撓度對比曲線Fig.8 Tip Deflections of Minimum Solutions of Vibration and Energy before and after Neural Network Fitting
5 結(jié)論
針對雙柔性連桿機(jī)械臂振動抑制與能量優(yōu)化問題,提出了一種基于多目標(biāo)優(yōu)化算法與RBF神經(jīng)網(wǎng)絡(luò)結(jié)合的軌跡規(guī)劃方法。該方法能較好的實現(xiàn)振動與能量的優(yōu)化目標(biāo),且求解出的驅(qū)動力矩連續(xù)平滑。RBF神經(jīng)網(wǎng)絡(luò)擬合得到的力矩不僅能實現(xiàn)理想的關(guān)節(jié)運(yùn)動軌跡,滿足期望的操作任務(wù),還能進(jìn)一步減小機(jī)械臂運(yùn)動過程中的末端振動,有利于后續(xù)的柔性機(jī)械臂振動抑制控制或軌跡跟蹤控制研究。該方案誤差小、計算量低、適應(yīng)性強(qiáng),有利于實際工程應(yīng)用。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
