四足機器人五桿單腿機構性能分析及軌跡規劃
2022-08-19 11:01:34董小閔安國鵬于建強
機械設計與制造 2022年8期
關鍵詞:規劃
董小閔,安國鵬,于建強,彭 霄
(1.重慶大學機械工程學院,重慶400044;2.重慶大學自動化學院,重慶400044)
1 引言
四足機器人的腿部結構既支撐本體,又作為運動部分驅動機體移動,直接影響機器人的運動性能與承載能力,是機器人設計的關鍵[1]。其包含腿部構型的設計以及驅動方式的選取,應滿足具有較好的承載能力以及較小的運動慣量,同時具有較大的足端工作范圍[2]。針對這些設計要求,目前常見的四足機器人腿部構型有串聯式、并聯式以及混聯式三種,針對不同的構型其具有不同的特性。其中,串聯式多為開環關節連桿機構,由大腿、小腿以及髖關節組成,仿照四足動物腿部關節的布置形式有膝式與肘式兩種[3],如國外某公司開發的Little Dog、Big Dog 等系列機器人,腿部構型均采用串聯機構,具有較塊的移動速度,為提高其承載能力采用高輸出功率的液壓驅動方式[4],從而導致機器人單腿質量較大。對于并聯機構,具有較大的載重自重比,如文獻[5]助老四足可重構并聯機器人,每條腿有三個電機集中在機身上,減小腿部慣性,但是足端工作范圍較小,移動速度較慢。對于混聯機構,融合了串聯與并聯兩種構型,兼具二者的優勢,如上海交通大學設計的四足小象機器人,具有較優的承載能力以及各向同性[6],但是其腿部桿件較多,動力學模型的建立以及控制系統的搭建較為復雜。
從目前的研究現狀來看,一個性能較優的腿部構型應具備低慣量[7]、大負載、大工作范圍以及較少的桿件數量,針對這些要求,提出一種五桿機構的腿部構型,對其負載能力進行分析,并與串聯機構進行對比,由于引入了閉鏈機構,對其靈巧性進行研究,在此基礎上對其進行足端軌跡規劃,將其軌跡規劃在靈巧性較高的區域,確保機構具有較優的輸入與輸出傳遞特性,并通過虛擬樣機仿真以及實物平臺的實驗驗證規劃的有效性。
2 五桿單腿機構設計與性能分析
2.1 五桿單腿機構設計
由于閉鏈機構具有較好的承載能力,因此將五桿機構融入到機器人腿部結構中,如圖1(a)所示。圖中A、E兩處為動力源,AB與DE為主動桿,驅動BC與DC桿帶動足端F在矢狀面的擺動,驅動3 實現足端F在橫斷面的擺動。其在矢狀面的機構簡圖,如圖1(b)所示。ABCDE組成一個平面五桿閉鏈機構,自由度為2,驅動1 與驅動2 協同控制C點運動,通過CF起到位移放大作用,以提高足端工作范圍,為提高與地面的適應能力,以球鉸作為足端踝關節。
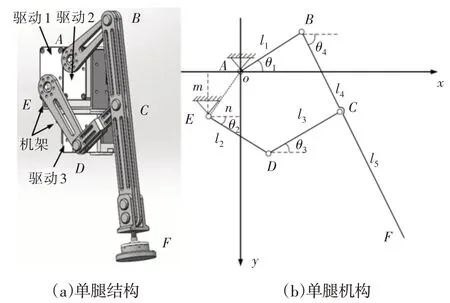
圖1 單腿機構簡圖Fig.1 Schematic of the Leg Structure
該機構將腿部驅動系統集中在機身上,降低了腿部運動慣量,為進一步分析引入閉鏈機構對負載能力以及靈巧性的影響,需要建立其運動學模型,求解驅動輸入角度空間與足端輸出位置空間的映射關系。各桿桿長以及初始角度,如圖1(b)所示。建立機身坐標系,采用代數法得到該機構的運動學正解模型為:

其中,各參數:
其中,B與D點坐標均為θ1、θ2的函數。
其運動學逆解模型為:

其中,各參數為:a1= -2l1xF;b1= 2l1yF;c1=x2F+y2F+l21-(l4+l5)2。

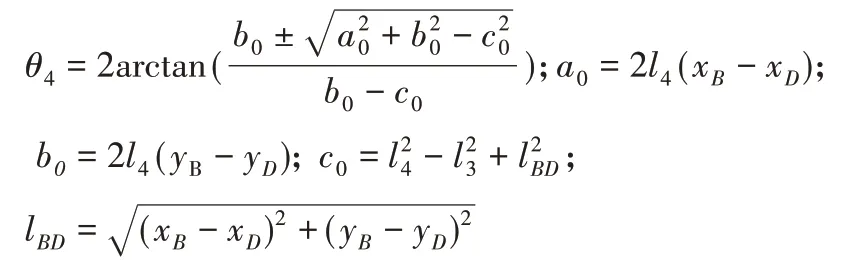
其中,a3= 2l2(n+x);b3= 2l2(y-m);c3= -((x+n)2+(y-m)2+(l22-l23));其中,x=xF-l5cosθ4,y=yF-l5sinθ4,θ4求得為:

由式(1)~式(4)得到該機構輸入角度與輸出位置的關系,為后文的機構性能分析以及軌跡規劃提供理論基礎。
2.2 五桿單腿機構性能分析
2.2.1 動態靜力學分析
由于單腿構型中閉鏈機構輸入為兩個獨立驅動協調工作,驅動之前不會互成負載,對其進行動態靜力學分析來確定機構驅動力矩與驅動角度之間的關系。由達朗貝爾原理可知該機構在慣性力與外力的作用下構件可認為處于平衡狀態,由于該腿部質量較小,可忽略慣性力,轉化為靜力學問題。
如圖2(a)所示,外力為地面的支撐反力FN,驅動力矩為T1,T2,選取θ1,θ2為廣義坐標,外力的虛功W為:
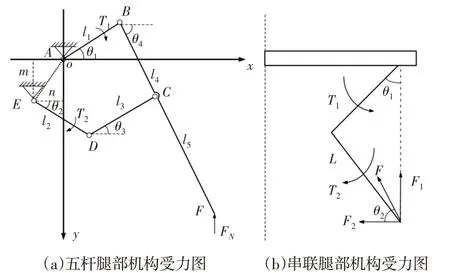
圖2 單腿機構受力圖Fig.2 The Force of the Leg Structure

F點的縱向虛位移由式(1)求得:

由閉鏈機構的矢量方程得到其位移微分方程為:

結合式(5)~式(7),求得靜態驅動力矩為:

常見的串聯腿部機構,如圖2(b)所示。為前肘后膝式,取兩節腿長均為L,其靜態驅動力矩與肘關節角度θ1以及小腿入地角度θ2關系為:

其中,F1=Fsinθ2;F2=Fcosθ2。
連桿l1,l2,l3,l4,l5長度為60mm,65mm,60mm,75mm,100mm,取串聯桿長L為90mm,使得二者機身高度基本一致,θ1,θ2的變化范圍為(20~70)°,外力均為25N,得到靜力矩,如圖3、圖4所示。從圖3、圖4可知,五桿機構腿部構型靜力矩的最大值為3.5Nm,小于串聯腿部構型的6.5Nm,其變化范圍也較小,在相同外載荷下需要較小的驅動力矩,表明能耗較小,在相同驅動力矩下可承擔較大的外載,具有較大的負載能力。
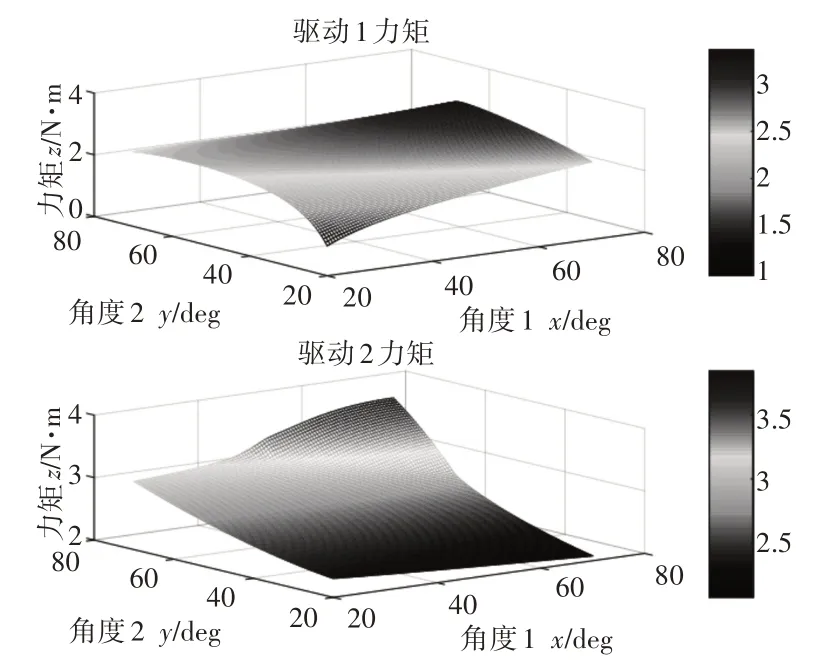
圖3 五桿機構靜力矩Fig.3 Static Torque of Five-Bar Mechanism
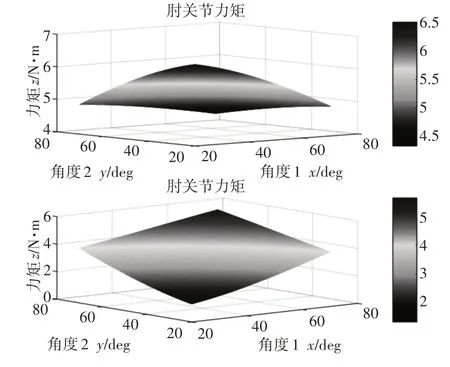
圖4 串聯機構靜力矩Fig.4 Static Torque of Series Mechanism
2.2.2 速度靈巧性分析
由于引入閉鏈機構,需要對其靈巧性進行研究,以得到工作范圍內的靈巧性較高的區域來規劃足端軌跡。靈巧性通常采用機構末端速度雅各比矩陣的條件數K(J)作為評價指標[8],為簡化計算可以采用條件數的導數ε來描述[9],其在(0~1)之間,越大表明靈巧性越好。
由于研究為五桿腿部機構在矢狀面的靈巧性,因此僅對其速度靈巧性進行分析。
即:

其中,速度雅各比矩陣Jv由式(1)推導可得為:
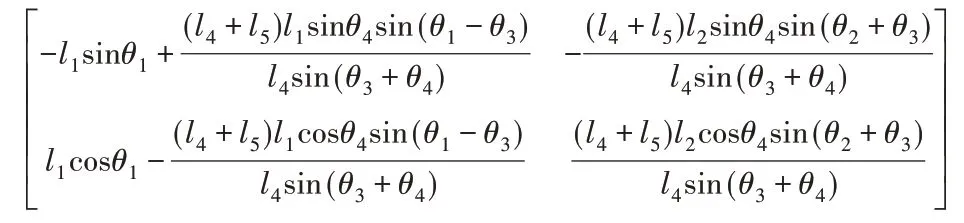
由于桿件AB、CD在第一三象限擺動,取θ1,θ2的最大變化范圍為(0~90)°,得到其速度靈巧性分析情況,如圖5所示。由圖可知靈巧性最大可達0.55,驅動1 在(25~50)°之間,驅動2 在(40~75)°之間時靈巧性均在0.5左右,具有較好的速度輸入與輸出傳遞特性。
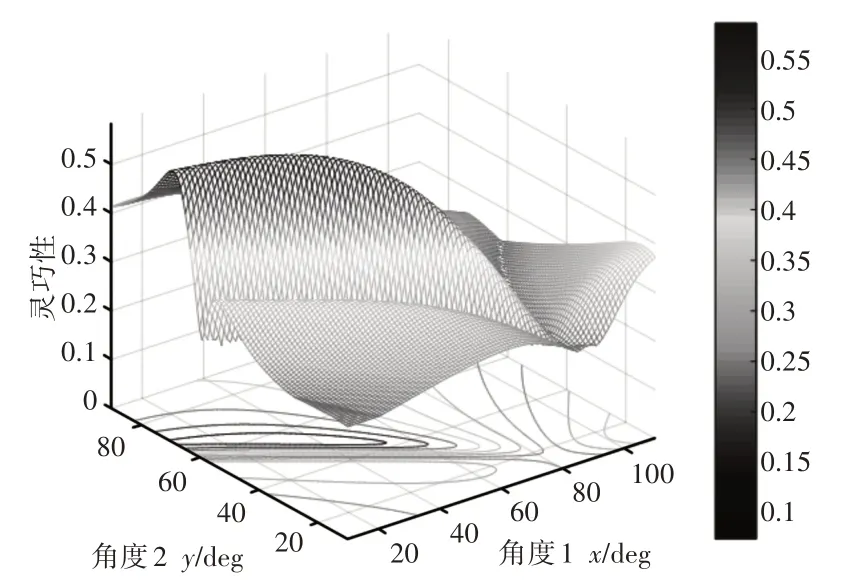
圖5 速度靈巧性空間Fig.5 Dexterity Space of Speed
3 足端軌跡規劃與仿真
3.1 足端軌跡規劃
采用改進后的復合擺線軌跡作為足端軌跡進行規劃,其在足端著地時水平與豎直方向速度為0,可實現軟著陸,以較小地面的沖擊力,其軌跡方程[10]如下所示:
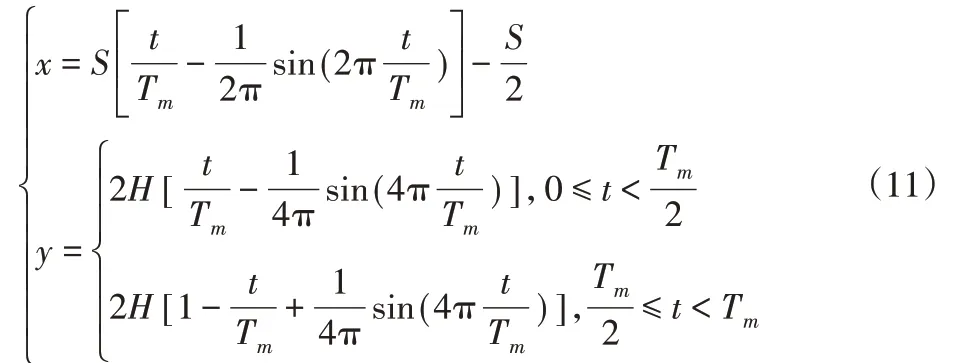
式中:S—步長;H—抬腿高度;Tm—擺動相周期。
當驅動1與驅動2角度變化范圍為(20~70)°時得到足端軌跡工作范圍,如圖6(b)所示。其在豎直方向范圍為75mm,在水平方向范圍為160mm,在此桿長約束條件下具有相對較大的工作范圍,其中綠色部分為上文分析得到靈巧性在0.5左右的區域。
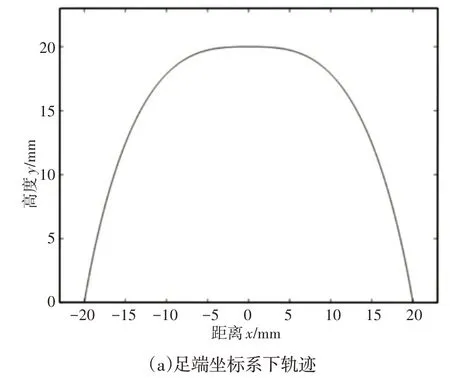
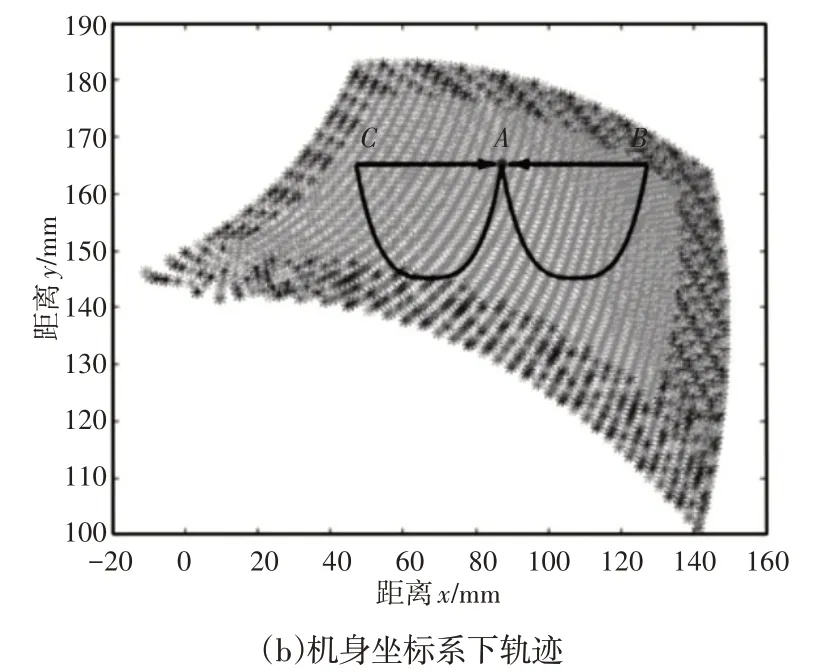
圖6 足端軌跡規劃情況Fig.6 Trajectory Planning of the Foot
取足端軌跡S為40mm,H為20mm,擺動相周期支撐相周期均取0.3s,得到足端軌跡,如圖6(a)所示。選取靈巧性最高時θ1為30°,θ2為50° 作為腿部機構的初始姿態,其落腳點為A點,規劃得到前腿與后腿的機身坐標系下的軌跡,如圖6(b)所示。前腿擺動相從A沿擺線至B,支撐相從B沿直線到A,后腿沿AC與此相同。由圖可知,足端軌跡基本包含在靈巧性在0.5左右的區域范圍內。
3.2 單腿軌跡仿真
建立機器人單腿結構虛擬樣機,由運動學逆解求得驅動角度的變化情況,如圖7 所示。圖中驅動1 與驅動2 為驅動函數,在ADAMS中仿真得到前腿后腿軌跡,如圖8所示。
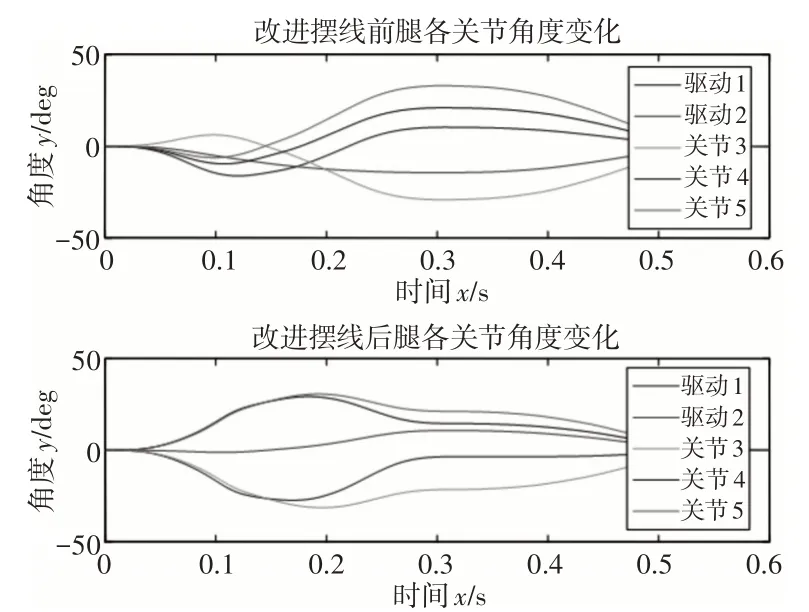
圖7 單腿驅動角度與各關節角度Fig.7 Single Leg Drive Angle and Joint Angle
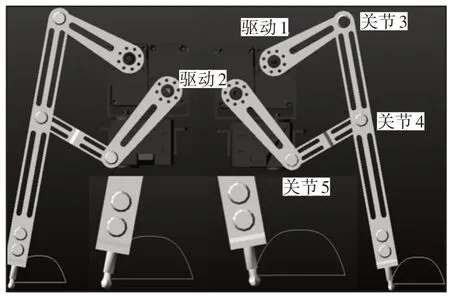
圖8 單腿軌跡仿真Fig.8 Simulation of Single Leg Trajectory
由仿真軌跡驗證了運動學模型求解的正確性以及軌跡規劃的有效性,運動過程中各個關節的角度變化情況,如圖7 所示。可知各關節角位移角速度均平滑無突變,具有較好的運動性能。
4 單腿軌跡跟蹤實驗
4.1 單腿實驗平臺
為了進一步驗證該機構設計以及軌跡規劃的可行性,搭建單腿試驗平臺,采用輕質鋁合金材料,加工機器人單腿物理樣機。采用DYNAMIXEL 系列下的XM 舵機作為驅動源,主控制器為U2D2,舵機通過電源適配器經電源模塊進行供電,如圖9(a)所示。單腿控制系統,如圖9(b)所示。通過PC發送指令給主控制器,主控制器轉化為指令包通過TTL半雙工異步通信方式發送給舵機進行驅動,同時舵機將轉動角度、溫度等信息狀態包發送給主控制器,主控制器轉化為數據包反饋給PC,由于需要監測足端位置的運動情況,因此需要采集驅動舵機的角度信息,利用內置角度傳感器讀取實時舵機的角度值。
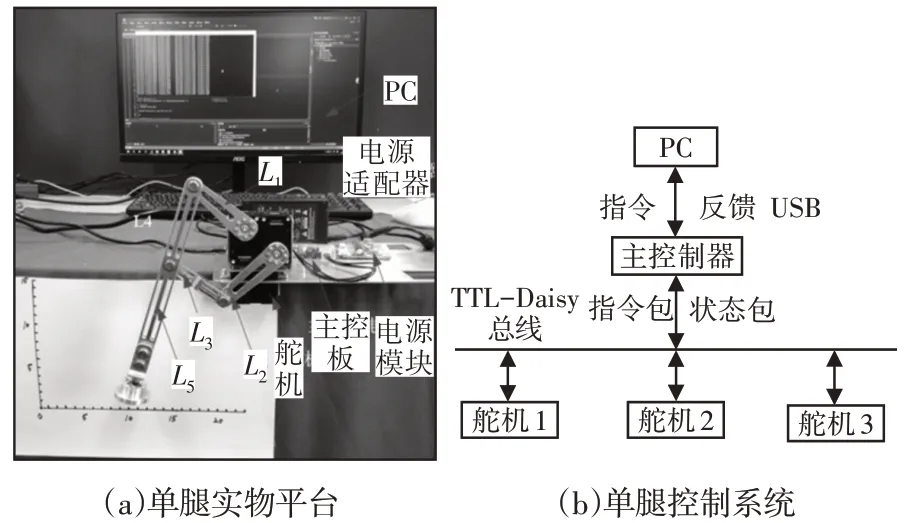
圖9 單腿實驗平臺Fig.9 Experimental Platform of the Single Leg
4.2 單腿軌跡實驗
在搭建的實驗平臺中進行足端軌跡實驗,實驗過程,如圖10所以。通過角度傳感器采集驅動角度的變化情況。將其帶入運動學模型中,得到實際足端軌跡與理想足端軌跡對比情況,如圖11所示。從圖11可知利用采集到的角度信息求得足端軌跡基本與理想軌跡重合,可能關節間存在摩擦等因素導致有一些抖動情況,圖10中得到實際軌跡步長約為47mm,步高約為24mm,均大于規劃值,這可能是由于桿件加工的尺寸誤差累積導致足端軌跡偏差,整體實驗軌跡基本與規劃一致,進一步驗證了機構設計的合理性與規劃的正確性。
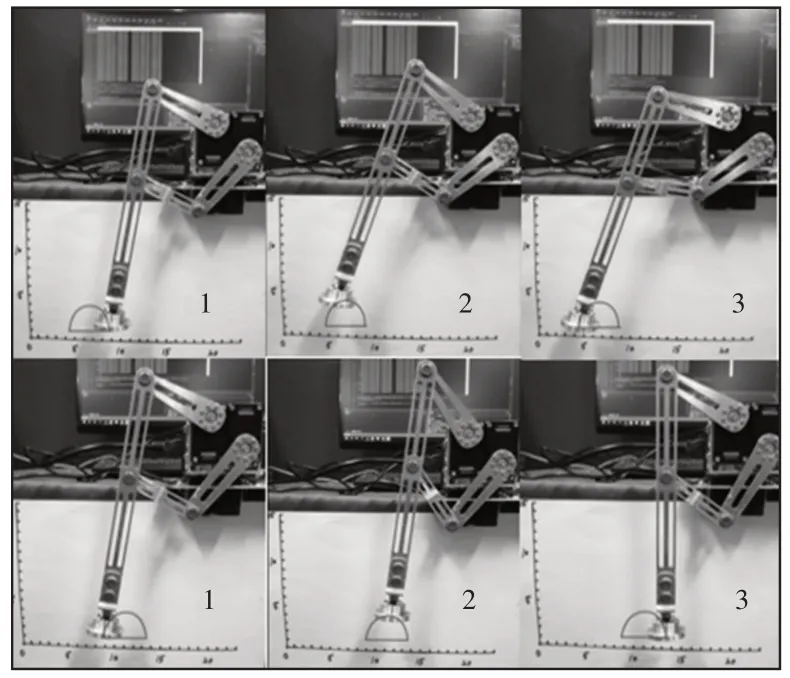
圖10 單腿軌跡跟蹤Fig.10 The Movement Tracking of Single Leg
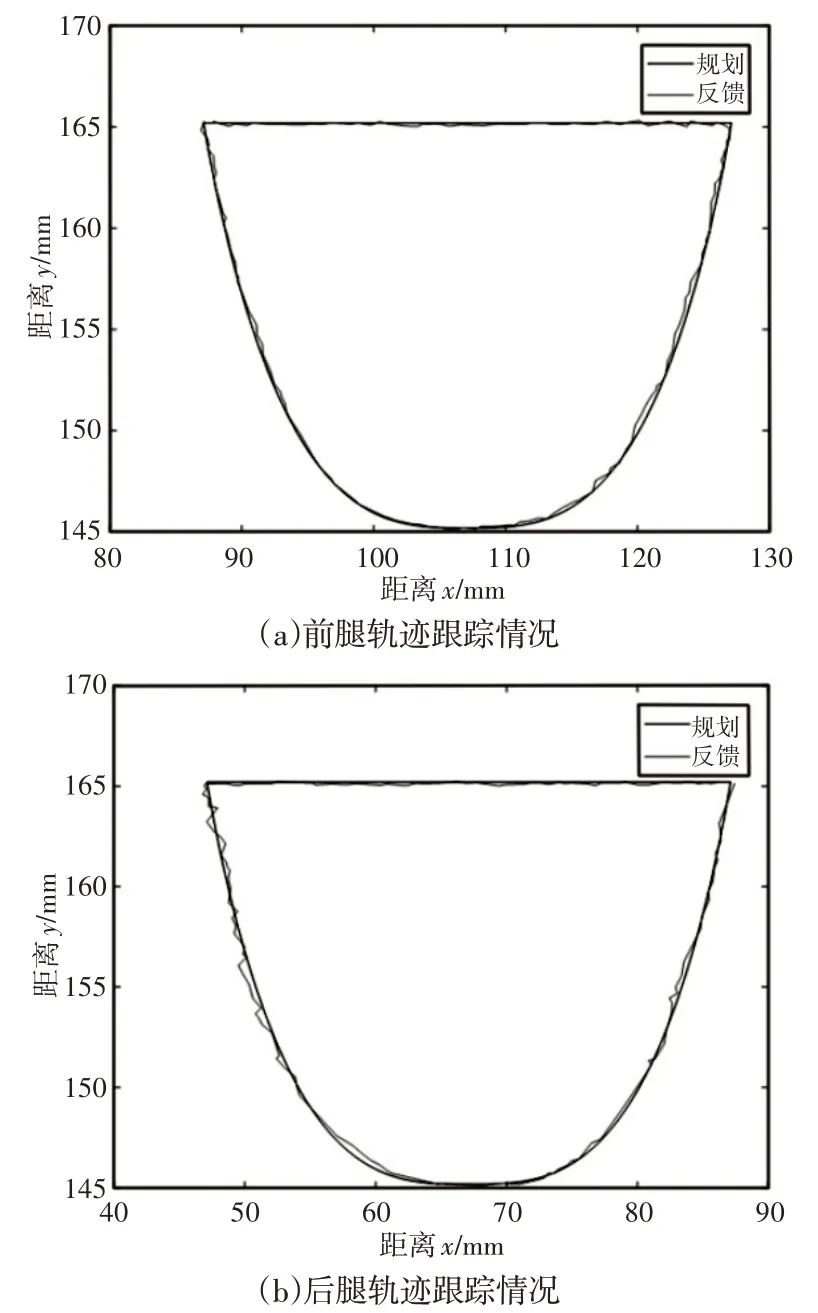
圖11 軌跡跟蹤對比情況Fig.11 Comparison of Trajectory Tracking
5 結論
為結合四足機器人串聯腿部構型工作范圍大、靈活性高與并聯腿部構型負載能力強的特點,提出一種基于五桿機構的腿部構型,以較少的桿件來降低協調控制的復雜度,對其負載性能進行分析,并與常見串聯腿部構型進行對比,在相同外載荷的情況下所需驅動力矩遠小于串聯機構,具有大負載比與低能耗性。在運動學基礎上對其速度靈巧性空間進行分析,其最高靈巧性值可達0.55,并將足端復合擺線軌跡規劃在靈巧性0.5以上的足端工作范圍內,具備較優的速度傳遞特性。最后通過單腿虛擬樣機以及實物平臺實驗驗證了機構設計的可行性以及規劃的有效性,為下一步整體大負載比的機器人步態規劃與研究奠定基礎。
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
