南極科考平臺(tái)肢腿部件合作博弈優(yōu)化設(shè)計(jì)
2022-08-19 10:57:24趙富強(qiáng)常寶玉李釗鈺牛志剛
機(jī)械設(shè)計(jì)與制造 2022年8期
趙富強(qiáng),常寶玉,李釗鈺,牛志剛
(1.太原科技大學(xué)重型機(jī)械教育部工程研究中心,山西 太原 030024;2.太原理工大學(xué)機(jī)械與運(yùn)載工程學(xué)院,山西 太原 030024)
1 引言
南極內(nèi)陸平均風(fēng)速可達(dá)16m∕s,最大可達(dá)(40~50)m∕s,科考設(shè)備在南極考察作業(yè)時(shí)會(huì)遇到強(qiáng)風(fēng)環(huán)境、雪丘雪隆地形,這對(duì)南極科考平臺(tái)設(shè)計(jì)提出了新要求。針對(duì)南極科考平臺(tái)肢腿[1]設(shè)計(jì),不僅要考慮不同工況時(shí)肢腿位姿變化造成拉彎扭耦合作用變形,還需研究外形尺寸引起風(fēng)阻、質(zhì)量變化對(duì)整體功耗的影響。在機(jī)械設(shè)計(jì)時(shí)既要考慮降低功耗又想要提高機(jī)構(gòu)承載能力,這兩個(gè)設(shè)計(jì)目標(biāo)相互矛盾制約,因此,開(kāi)展南極科考平臺(tái)肢腿部件優(yōu)化設(shè)計(jì)理論與方法研究,對(duì)保障南極科考平臺(tái)運(yùn)行能力,提高節(jié)能水平有重要戰(zhàn)略意義。
國(guó)內(nèi)外針對(duì)機(jī)械結(jié)構(gòu)優(yōu)化設(shè)計(jì)主要是基于力學(xué)性能的尺寸優(yōu)化設(shè)計(jì)研究。解決多目標(biāo)優(yōu)化問(wèn)題常用遺傳算法、粒子群算法、蜻蜓算法[2]優(yōu)化算法。文獻(xiàn)[3]用七種基于群體的元啟發(fā)式算法對(duì)二維鋼框架結(jié)構(gòu)進(jìn)行尺寸優(yōu)化,在滿足一定的位移和應(yīng)力限制條件下,使剛接鋼框架結(jié)構(gòu)的重量最小;文獻(xiàn)[4]以尺寸和質(zhì)量為約束對(duì)三軸振動(dòng)夾具采用多目標(biāo)遺傳算法進(jìn)行輕量化和一階固有頻率最大化優(yōu)化設(shè)計(jì);文獻(xiàn)[5]采用多目標(biāo)遺傳算法對(duì)汽車驅(qū)動(dòng)軸展開(kāi)多目標(biāo)優(yōu)化設(shè)計(jì),優(yōu)化后的結(jié)構(gòu)在滿足強(qiáng)度和剛度要求下達(dá)到了輕量化的設(shè)計(jì)目標(biāo);文獻(xiàn)[6]采用人工神經(jīng)網(wǎng)絡(luò)-遺傳算法對(duì)多單元錐管展開(kāi)了多目標(biāo)優(yōu)化設(shè)計(jì),提高其耐撞性。
遺傳算法雖然適用范圍廣,但有計(jì)算效率低的不足,粒子群算法對(duì)比遺傳算法有運(yùn)算快的優(yōu)點(diǎn),文獻(xiàn)[7]采用粒子群算法對(duì)復(fù)雜船舶結(jié)構(gòu)展開(kāi)優(yōu)化,與遺傳算法對(duì)比能更快找到最優(yōu)解;文獻(xiàn)[8]對(duì)萬(wàn)向聯(lián)軸器叉頭展開(kāi)了基于粒子群優(yōu)化算法的尺寸優(yōu)化,提高了叉頭的承載能力。采用粒子群算法求解多目標(biāo)優(yōu)化問(wèn)題時(shí)因?yàn)闄?quán)重的分配有其局限性,以博弈思想分析可以避免這些缺陷。文獻(xiàn)[9]以多目標(biāo)優(yōu)化設(shè)計(jì)合作博弈求解方法對(duì)4桁架和拱形壩體進(jìn)行優(yōu)化;文獻(xiàn)[10]提出一種自適應(yīng)博弈方法,以汽車制動(dòng)器為例分別與競(jìng)爭(zhēng)博弈和合作博弈進(jìn)行了對(duì)比,證明了其收斂速度更快。以上文獻(xiàn)從整體強(qiáng)度、質(zhì)量方面開(kāi)展結(jié)構(gòu)優(yōu)化分析,而在實(shí)際工況中,結(jié)構(gòu)優(yōu)化不僅要考慮本身因素,還需要考慮服役環(huán)境約束對(duì)結(jié)構(gòu)外形設(shè)計(jì)的影響。
這里以一種南極科考平臺(tái)肢腿部件為優(yōu)化對(duì)象,考慮因極限支撐和雪丘雪隆地形造成肢腿部件承載能力差、南極強(qiáng)風(fēng)環(huán)境引起行駛功耗大的設(shè)計(jì)問(wèn)題,采用合作博弈與多目標(biāo)粒子群算法相結(jié)合的方法求解肢腿部件結(jié)構(gòu)特征參數(shù)的最優(yōu)解。
2 肢腿部件模型
2.1 南極科考平臺(tái)總體構(gòu)型
南極科考平臺(tái)采用六肢腿履帶足移動(dòng)式構(gòu)型,從上到下主要部件分別為固定臺(tái)、肢腿和履帶足,肢腿由上肢腿和下肢腿組成,固定臺(tái)為正六邊形,每個(gè)角處設(shè)置一個(gè)肢腿,上肢腿由推桿1 驅(qū)動(dòng),下肢腿由桿2 驅(qū)動(dòng),肢腿為固定臺(tái)和履帶足之間的連接裝置,各肢腿協(xié)調(diào)動(dòng)作實(shí)現(xiàn)各個(gè)方位爬坡、轉(zhuǎn)向、跨越等功能,確保了南極科考平臺(tái)在南極冰雪地形行駛的安全性,總體構(gòu)型,如圖1所示。
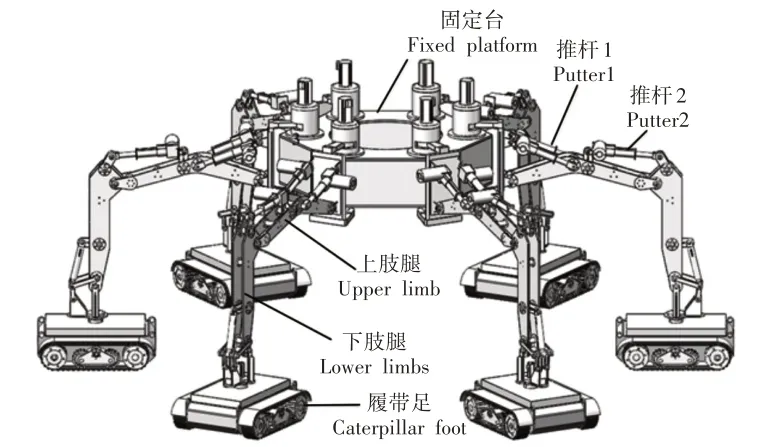
圖1 總體構(gòu)型Fig.1 General Configuration
2.2 肢腿部件
肢腿部件材料選用輕質(zhì)材料鋁合金7075,外形結(jié)構(gòu)為厚板式構(gòu)型,各部分之間用螺栓裝配連接,避免因焊接對(duì)結(jié)構(gòu)造成變形影響,這里以上肢腿為例,上肢腿裝配圖,如圖2 所示。兩側(cè)板為主體結(jié)構(gòu),側(cè)板變形直接影響著整個(gè)平臺(tái)結(jié)構(gòu)強(qiáng)度;承力桿組可有效簡(jiǎn)化上肢腿結(jié)構(gòu)實(shí)現(xiàn)減重,增強(qiáng)抗扭轉(zhuǎn)剛度;加強(qiáng)環(huán)可提高鉸接孔處的強(qiáng)度。兩側(cè)板厚度為b,將上肢腿以側(cè)板中間折彎處以為界分為左右兩段分析,左段側(cè)板寬度為hAB,右段側(cè)板寬度為hCD。肢腿作為整個(gè)科考平臺(tái)的重要部件所占重量約為整體重量的1∕5,起到支撐固定臺(tái)、轉(zhuǎn)換履帶足空間位置和實(shí)現(xiàn)南極科考平臺(tái)空間伸展的作用,這使得肢腿部件要承受復(fù)雜載荷,因此設(shè)計(jì)中既要從本體結(jié)構(gòu)強(qiáng)度出發(fā),滿足肢腿在空間位姿變化時(shí)不出現(xiàn)過(guò)載變形的要求,又需考慮強(qiáng)風(fēng)條件肢腿外形及質(zhì)量對(duì)科考平臺(tái)整體運(yùn)行功耗的影響。特別是肢腿部件在極限支撐、30°坡度雪丘雪隆地形抬腿時(shí),上肢腿比下肢腿承載大,因此以上肢腿作為優(yōu)化對(duì)象,開(kāi)展結(jié)構(gòu)特征參數(shù)優(yōu)化。
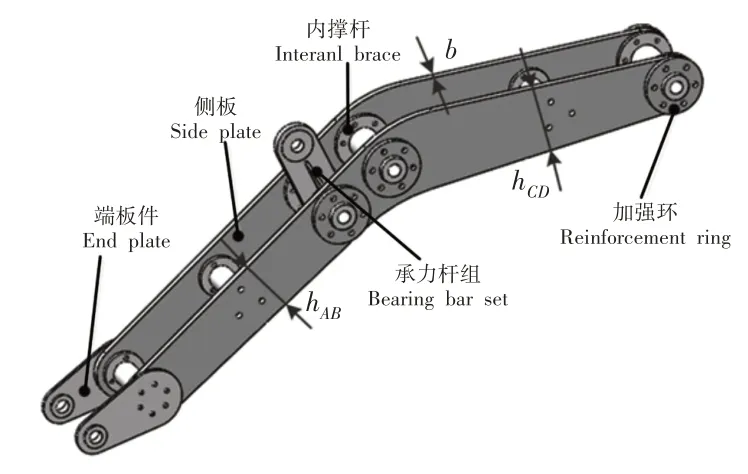
圖2 上肢腿裝配圖Fig.2 Assembly Drawing of Upper Limb
3 工況及受載變形分析
3.1 工況分析
南極科考平臺(tái)通過(guò)各肢腿動(dòng)作變化以適應(yīng)不同地形,肢腿動(dòng)作時(shí)其受力狀況也發(fā)生改變,選取極限支撐、在30°坡度雪丘雪隆地形抬腿兩種極限工況進(jìn)行分析,肢腿動(dòng)作及受力特征,如圖3 所示。對(duì)各連接點(diǎn)進(jìn)行受力分析,在圖3(a)工況1 中,E點(diǎn)-上肢腿與下肢腿的鉸接點(diǎn),E點(diǎn)受到下肢腿的作用力Fe;D點(diǎn)-上肢腿與固定臺(tái)的鉸接點(diǎn),受到固定臺(tái)的作用力Fd。分別以E、D點(diǎn)為原點(diǎn),以平行于側(cè)板方向?yàn)閤軸、垂直x軸方向?yàn)閥軸建立兩個(gè)平面直角坐標(biāo)系,F(xiàn)e與y2夾角為θe,F(xiàn)d與x1夾角為θd。在圖3(b)工況2 中,G1—下肢腿重力;G2—履帶足重力;L1、L2—兩個(gè)重力與重心的距離;β—雪丘雪隆路面的坡度。根據(jù)此建立力學(xué)方程分析部件受載變形情況。極限工況下肢腿動(dòng)作及力學(xué)特征,如表1所示。

表1 極限工況下肢腿動(dòng)作及力學(xué)特征Tab.1 Movement and Mechanical Characteristics of Limbs Under Limit Working Conditions
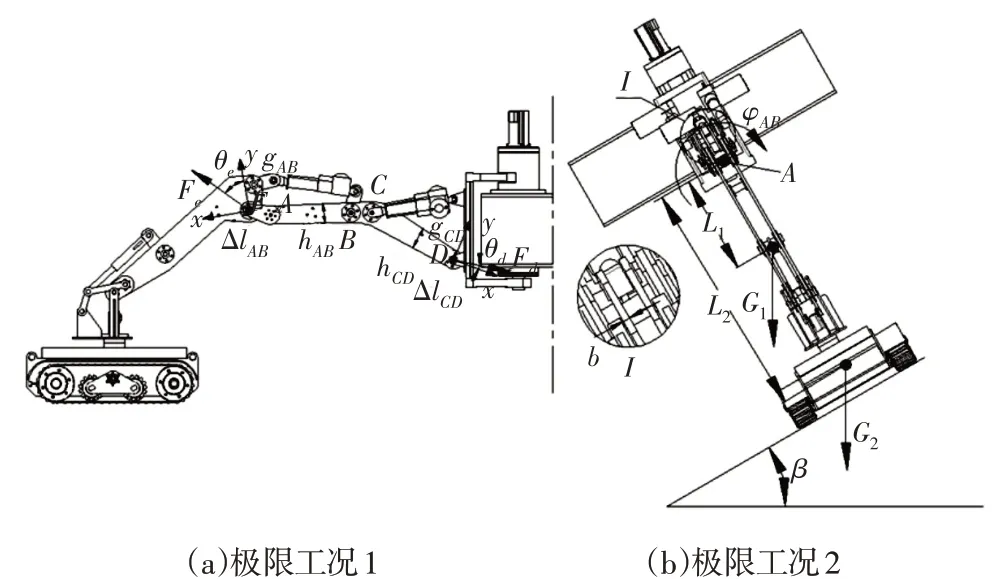
圖3 肢腿動(dòng)作及受力示意圖Fig.3 Schematic Diagram of Limb Movement and Force
3.2 受載變形分析
3.2.1 縱向變形gAB、gCD
AB、CD段在圖3(1)中兩個(gè)坐標(biāo)系中沿y軸發(fā)生的縱向變形gAB、gCD為:

式中:θe—Fe與所在坐標(biāo)系縱坐標(biāo)的夾角;lEA—E點(diǎn)與端板件螺栓連接處中心A點(diǎn)之間的距離;lAB—端板件螺栓連接處A點(diǎn)與上肢腿和推桿2的鉸接點(diǎn)B點(diǎn)之間的距離;lCD—上肢腿和推桿1的鉸接點(diǎn)C點(diǎn)與D點(diǎn)之間的距離;E—所選材料鋁合金7075的彈性模量。
3.2.2 橫向變形ΔlAB、ΔlCD
AB、CD段在圖3(1)中兩個(gè)坐標(biāo)系中沿x軸發(fā)生的橫向變形ΔlAB、ΔlCD為:

3.2.3 扭轉(zhuǎn)變形φAB
在圖3(2)中,AB段收到扭轉(zhuǎn)作用,AB段相對(duì)扭轉(zhuǎn)角φAB為:

式中:μ-泊松比;η—修正因數(shù)。
4 合作博弈求解肢腿部件多目標(biāo)優(yōu)化設(shè)計(jì)
合作博弈與非合作博弈區(qū)別為其目標(biāo)最終為哪方達(dá)到最大效益,合作博弈是使整體效益達(dá)到最好,非合作博弈是使各博弈方達(dá)到最大效益。在合作博弈中各博弈方分別有其自己的策略與收益函數(shù),各方通過(guò)合作、協(xié)商的方式確定可行解,最終的結(jié)果對(duì)于各決策者可能不是最優(yōu)解,但對(duì)于全局來(lái)說(shuō)是一個(gè)最優(yōu)解。南極科考平臺(tái)肢腿部件優(yōu)化目標(biāo)為肢腿承載變形、運(yùn)行功耗,為使整個(gè)平臺(tái)性能達(dá)到最優(yōu),采用合作博弈。兩優(yōu)化目標(biāo)者之間存在著矛盾關(guān)系,所以將這兩方作為博弈方,變量?jī)?yōu)化的過(guò)程就是要在這兩者之間尋求最優(yōu)解的過(guò)程。對(duì)于合作博弈解決肢腿多目標(biāo)優(yōu)化問(wèn)題,具體步驟有建立上肢腿多目標(biāo)優(yōu)化博弈模型、粒子群算法對(duì)收益函數(shù)求最優(yōu)解和最后對(duì)優(yōu)化結(jié)果進(jìn)行分析。
4.1 上肢腿多目標(biāo)優(yōu)化博弈模型
4.1.1 多目標(biāo)優(yōu)化問(wèn)題的博弈描述
對(duì)上肢腿在實(shí)際約束條件下進(jìn)行結(jié)構(gòu)設(shè)計(jì)優(yōu)化屬多目標(biāo)優(yōu)化問(wèn)題,多目標(biāo)優(yōu)化問(wèn)題主要包括三方面內(nèi)容:選擇優(yōu)化變量、建立目標(biāo)函數(shù)和確定變量取值范圍,其數(shù)學(xué)模型如下式:
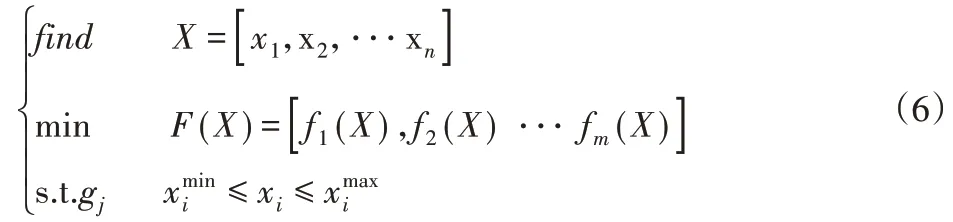
式中:x1,x2,…xn—n個(gè)設(shè)計(jì)變量;f1(X),f2(X)…fm(X)—m個(gè)目標(biāo)函數(shù);與—第i個(gè)設(shè)計(jì)變量的取值范圍。
解決多目標(biāo)優(yōu)化問(wèn)題常用統(tǒng)一目標(biāo)法,如下式:

式中:D(X)—統(tǒng)一后的總目標(biāo);Wi—個(gè)人設(shè)置的權(quán)重系數(shù),該方法運(yùn)算時(shí)間長(zhǎng),且優(yōu)化結(jié)果受個(gè)人主觀行為影響,將多目標(biāo)優(yōu)化問(wèn)題轉(zhuǎn)變?yōu)槎喾讲┺臎Q策問(wèn)題,可以縮短運(yùn)算時(shí)間,避免人為設(shè)置權(quán)重系數(shù),提高解決問(wèn)題能力。
在博弈中,假設(shè)博弈G中包含有m個(gè)博弈方,每個(gè)博弈方的策略空間分別為T1,T2,…Tm,每個(gè)博弈方的收益函數(shù)分別為u1,u2,…um。多目標(biāo)優(yōu)化問(wèn)題轉(zhuǎn)化為博弈決策問(wèn)題的具體操作有:m個(gè)優(yōu)化目標(biāo)對(duì)應(yīng)博弈決策中的m個(gè)博弈方,各目標(biāo)函數(shù)f1(X),f2(X)…fm(X)對(duì)應(yīng)u1,u2,…um,設(shè)計(jì)變量x1,x2,…xn對(duì)應(yīng)T1,T2,…Tm,設(shè)計(jì)變量的上、下限對(duì)應(yīng)博弈中的約束條件,則多目標(biāo)優(yōu)化問(wèn)題變?yōu)椴┺男问綖椋?/p>

4.1.2 優(yōu)化變量
側(cè)板是肢腿的主體結(jié)構(gòu),選擇側(cè)板截面的參數(shù)作為優(yōu)化變量,包括厚度b、左右兩段的高度hAB與hCD。側(cè)板的高度及厚度對(duì)上肢腿強(qiáng)度影響較大,因此選取此作為優(yōu)化變量。由于科考平臺(tái)總體已經(jīng)定型,側(cè)板的長(zhǎng)度不再變化。選擇與優(yōu)化目標(biāo)關(guān)聯(lián)度最高的結(jié)構(gòu)特征參數(shù)作為優(yōu)化變量,可以大幅提高優(yōu)化效率。
4.1.3 目標(biāo)函數(shù)
(1)最小變形優(yōu)化目標(biāo)w
AB、CD段x、y、z方向總位移函數(shù)為:
肢腿總變形為w,為了統(tǒng)一量綱,在w中加入系數(shù)βi:

(2)最低功耗優(yōu)化目標(biāo)p
厚度b、左右兩段的高度hAB與hCD三個(gè)設(shè)計(jì)變量直接關(guān)系到上肢腿外形和質(zhì)量的變化,設(shè)計(jì)變量改變會(huì)影響整個(gè)科考平臺(tái)在行駛中風(fēng)阻的大小,這對(duì)整個(gè)平臺(tái)運(yùn)行功耗有直接影響。南極平均16m∕s風(fēng)速的強(qiáng)風(fēng)會(huì)產(chǎn)生不可忽略風(fēng)阻影響,側(cè)板面積直接影響著風(fēng)阻大小,側(cè)板面積與南極科考平臺(tái)行進(jìn)中的風(fēng)阻f關(guān)系為:

式中:C—空氣阻力;ρa(bǔ)—空氣密度;VR—科考平臺(tái)行駛時(shí)風(fēng)速;Sz—上肢腿總迎風(fēng)面積。
由此可得風(fēng)阻消耗功率pf為:

式中:vC—南極科考平臺(tái)行駛速度。
上肢腿質(zhì)量M與整個(gè)南極科考平臺(tái)行駛功率PR關(guān)系為:

式中:μL—摩擦系數(shù);g—重力加速。
南極科考平臺(tái)總運(yùn)行功率為p:

4.1.4 約束條件
原上肢腿模型中側(cè)板尺寸b=8mm、hAB=64mm 與hCD=74mm,側(cè)板的b、hAB與hCD值過(guò)小會(huì)使肢腿在上述工況因大載荷發(fā)生結(jié)構(gòu)變形,若過(guò)大不僅會(huì)和平臺(tái)產(chǎn)生干涉還會(huì)造成整體質(zhì)量偏大,若變量取值范圍過(guò)大不僅會(huì)造成計(jì)算效率嚴(yán)重降低,而且無(wú)益于改善優(yōu)化效果,所以在保證結(jié)構(gòu)強(qiáng)度的前提下,以原上肢腿模型中側(cè)板尺寸附近范圍取值作為變量上下限,設(shè)定如下取值范圍:

4.1.5 計(jì)算策略空間
多目標(biāo)優(yōu)化問(wèn)題轉(zhuǎn)化為合作博弈的核心是如何將優(yōu)化變量轉(zhuǎn)換為博弈方的策略空間,具體包括求解單目標(biāo)最優(yōu)解、計(jì)算影響因子、影響因子模糊聚類,最終確定策略空間。
(1)最小變形和最小功耗單目標(biāo)優(yōu)化結(jié)果分別為:
(2)設(shè)計(jì)變量xj對(duì)博弈方i的影響因子為Δji,采用式(18)偏導(dǎo)法求Δji。

式中:n—設(shè)計(jì)變量個(gè)數(shù),定義第j個(gè)設(shè)計(jì)變量xj對(duì)全部m個(gè)優(yōu)化目標(biāo)的影響因子集合為Δj,求得三個(gè)變量的影響因子集合為:
(1)對(duì)影響因子進(jìn)行模糊聚類,首先對(duì)數(shù)據(jù)進(jìn)行標(biāo)準(zhǔn)化處理、建立模糊相似矩陣、求模糊聚類矩陣。

對(duì)B采用式(20)平移-極差變化方法求得:

采用歐拉距離法求得模糊相似矩陣R=(rij)n×m。

以下是求歐拉距離方法公式:

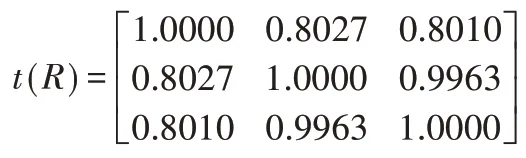
式中:c—相關(guān)系數(shù)。對(duì)R自平方求得傳遞閉包t(R),求等價(jià)矩陣=t(R),取分類系數(shù)k截取矩陣進(jìn)行模糊聚類,得到模糊聚類矩陣RK如下:
在上式中:

其中,k的取值范圍為[0,1]。
求得傳遞閉包t(R)結(jié)果為:
k依次取t(R)中各元素0.8010,0.8027,0.9963,1.000,所得到的模糊聚類矩陣分別為:
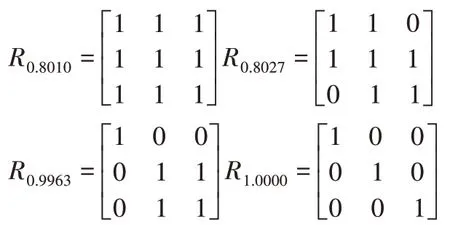
當(dāng)分類系數(shù)k為0.8010時(shí),全歸一類{x1,x2,x3},當(dāng)分類系數(shù)k為0.8027和1時(shí),分為3類{x1},{x2},{x3},當(dāng)分類系數(shù)k為0.9963時(shí),分為2類{x1},{x2,x3},因?yàn)橛袃蓚€(gè)博弈方,所以取分類系數(shù)k為0.9963,得到博弈方A1的策略集為T1={x1},博弈方A2的策略集為T2={x2,x3}。
4.1.6 確定各博弈方收益函數(shù)
將設(shè)計(jì)變量集合轉(zhuǎn)換為各博弈方的策略集后,將三個(gè)設(shè)計(jì)變量的下限定為初始策略集和分別為T1、T2的初始策略集,其中:
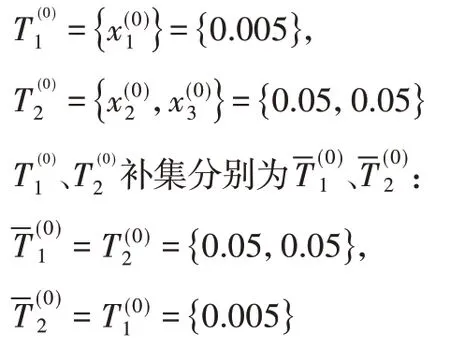
根據(jù)合作競(jìng)爭(zhēng)策略,博弈方的收益函數(shù)為:

式中:ui—各博弈方的收益函數(shù);m—博弈中博弈方的數(shù)量;wii—權(quán)系數(shù)與博弈方競(jìng)爭(zhēng)程度相關(guān),值越大則表示競(jìng)爭(zhēng)越激烈,wij相反。
此處取wii=0.8,wij=0.2。博弈總收益u為u=u1+u2。
4.2 粒子群優(yōu)化求解算法
對(duì)于建立的上肢腿部件優(yōu)化博弈模型,需要對(duì)收益函數(shù)u搜尋最優(yōu)解,這里采用有參數(shù)設(shè)置少、易收斂和運(yùn)算快等特點(diǎn)的粒子群優(yōu)化算法(Particle Swarm Optimization,PSO)求解目標(biāo)函數(shù)最優(yōu)解。該算法常用于解決許多全局優(yōu)化問(wèn)題,能滿足實(shí)際工程應(yīng)用。
粒子i的第d維速度更新公式:

粒子i的第d維位置更新公式:

式中:qi—權(quán)重因子;c1和c2—加速因子;pid—局部最優(yōu)位置;gd—全局最優(yōu)。
4.3 優(yōu)化結(jié)果對(duì)比
對(duì)博弈總收益u采用粒子群算法求最優(yōu)解,再比較粒子群算法對(duì)統(tǒng)一后的函數(shù)D求最優(yōu)值,兩種優(yōu)化方法迭代過(guò)程,如圖4所示。
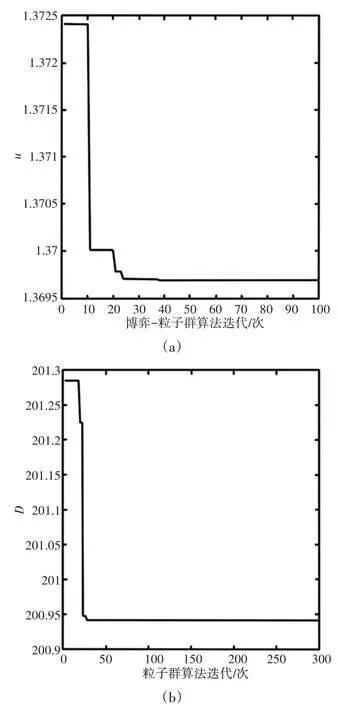
圖4 兩種優(yōu)化算法迭代過(guò)程Fig.4 Iteration Process of Two Optimization Algorithms
由圖4可知,博弈-粒子群算法經(jīng)過(guò)兩次階躍趨于最優(yōu),粒子群算法經(jīng)過(guò)一次突變趨于最優(yōu),前者比后者迭代少、收斂快。最終求得各設(shè)計(jì)變量最優(yōu)解及優(yōu)化目標(biāo)結(jié)果對(duì)比,如表2所示。
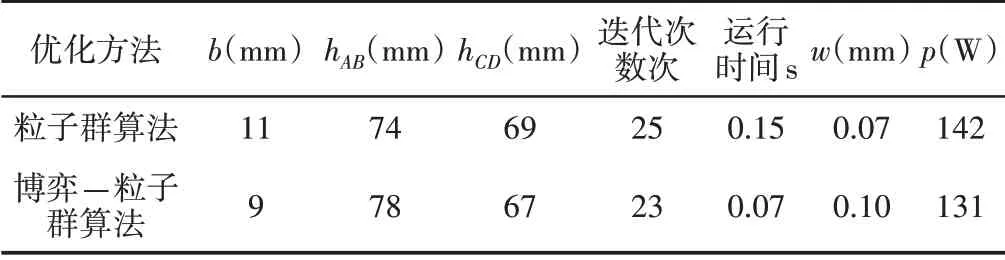
表2 優(yōu)化結(jié)果對(duì)比Tab.2 Comparison of Optimization Results
為了分析整體優(yōu)化效果,定義單位功耗內(nèi)抗變形提升能力指標(biāo)Δδ,如式(29)所示,其值越大表示優(yōu)化結(jié)果對(duì)于整體優(yōu)化效果更好。

由運(yùn)算可得,博弈-粒子群算法相比于粒子群算法運(yùn)算時(shí)間減少為一半,相對(duì)于原始模型兩個(gè)優(yōu)化目標(biāo)wyuan=0.19mm,pyuan=117W,粒子群算法在w和p方面分別提高了63%和26%,單位功耗內(nèi)抗變形提升能力Δδli為4.8×10-3mm∕W;博弈-粒子群算法在w和p方面分別提高了47%和12%,單位功耗內(nèi)抗變形提升能力Δδboyi為6.4×10-3mm∕W,由此可得博弈-粒子群算法在單位功耗內(nèi)抗變形能力提升比粒子群算法高1.3倍,優(yōu)化效果更加理想。
5 上肢腿有限元數(shù)值模擬驗(yàn)證
為了研究?jī)?yōu)化后上肢腿在兩種極限工況載荷作用下結(jié)構(gòu)強(qiáng)度與變形情況,設(shè)置Abaqus 中分析步為靜態(tài)通用,分別對(duì)原模型、粒子群算法、博弈-粒子群算法優(yōu)化后的三個(gè)結(jié)構(gòu)進(jìn)行有限元分析,驗(yàn)證所設(shè)計(jì)結(jié)構(gòu)的安全性。
5.1 有限元前處理
上肢腿模型網(wǎng)格設(shè)置為六面體單元形狀,原模型有69209個(gè)單元,如圖5所示。粒子群算法優(yōu)化后的模型有118155個(gè)單元,博弈-粒子群算法優(yōu)化后的模型有118151個(gè)單元,優(yōu)化后模型除與原模型在單元數(shù)量不同外其余設(shè)置都相同。設(shè)置材料屬性密度為2.810×109tonne∕mm3,楊氏模量為72000E∕MPa,泊松比為0.33,屈服應(yīng)力504MPa。對(duì)推桿1、2與上肢腿鉸接孔兩處進(jìn)行固定,對(duì)上、下肢腿鉸接處和上肢腿和固定臺(tái)鉸接處以耦合參考點(diǎn)的形式施加載荷Fe和Fd。

圖5 原上肢腿模型網(wǎng)格劃分圖Fig.5 Grid Partition Map of Original Upper Limb Model
5.2 有限元結(jié)果分析
經(jīng)ABAUQS后處理得到原模型與優(yōu)化后模型的有限元分析結(jié)果,如圖6所示。

圖6 優(yōu)化前后有限元數(shù)值模擬結(jié)果Fig.6 Finite Element Numerical Simulation Results before and after Optimizations
上述三種結(jié)構(gòu)的應(yīng)力應(yīng)變分析,如表3所示。其中,優(yōu)化前最大變形發(fā)生在y方向,為6.7mm,優(yōu)化后最大變形分別降低為原來(lái)的46%和33%;而最大應(yīng)力位置都出現(xiàn)在側(cè)板中段處。這表明優(yōu)化后結(jié)構(gòu)抗變形能力提升效果明顯,滿足在極限工況下的使用要求。
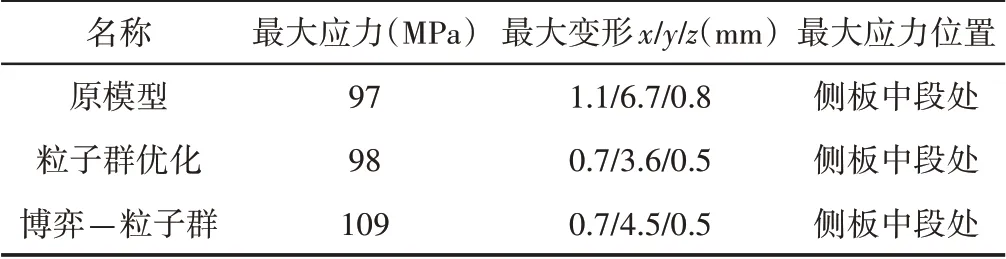
表3 上肢腿優(yōu)化前后各項(xiàng)參數(shù)對(duì)比Tab.3 Comparison of Parameters Before and After Upper Limb Optimization
6 結(jié)論
針對(duì)南極科考平臺(tái)肢腿部件在極限支撐和雪丘雪隆地形下抬腿時(shí)肢腿部件承載能力差、強(qiáng)風(fēng)環(huán)境引起行駛功耗大的設(shè)計(jì)問(wèn)題,以肢腿部件為研究對(duì)象,開(kāi)展結(jié)構(gòu)優(yōu)化設(shè)計(jì)研究。
(1)提出一種基于合作博弈的南極科考平臺(tái)肢腿部件多目標(biāo)優(yōu)化設(shè)計(jì)方法,將肢腿在受載發(fā)生最小變形、行駛最小功耗多目標(biāo)優(yōu)化問(wèn)題轉(zhuǎn)換為博弈問(wèn)題求解肢腿部件的結(jié)構(gòu)特征參數(shù)最優(yōu)解,求解結(jié)果表明博弈-粒子群算法對(duì)比單純粒子群優(yōu)化算法不僅所需運(yùn)算時(shí)間少,而且單位功耗內(nèi)抗變形能力提升更高。
(2)對(duì)原肢腿模型、粒子群算法優(yōu)化和博弈-粒子群算法優(yōu)化后肢腿模型進(jìn)行有限元數(shù)值模擬,可得兩種優(yōu)化后的模型最大應(yīng)變分別降低為原來(lái)的46%和33%,最大變形改善效果明顯,滿足肢腿部件在極限支撐和雪丘雪隆地形下抬腿工況的使用要求,驗(yàn)證了優(yōu)化后結(jié)構(gòu)的安全性。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中華詩(shī)詞(2020年1期)2020-09-21 09:24:52
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
小學(xué)生作文(中高年級(jí)適用)(2018年5期)2018-06-11 01:22:56
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
