基于數字攝影測量的火炮質心高度測量方法
2022-08-10 03:37:46崔愛蓮關士成孫科杰凌山珊
兵器裝備工程學報 2022年7期
關鍵詞:測量
崔愛蓮,關士成,金 毅,孫科杰,凌山珊
(1.中國人民解放軍63853部隊, 吉林 白城 137001; 2.中國人民解放軍63861部隊, 吉林 白城 137001)
1 引言
火炮質心位置是火炮重要性能參數之一,與火炮的行駛安全性、射擊穩定性密切相關,對火炮的整體設計和布局有著重要影響,其中質心高度測量是質心位置測量的難點。
現有的質心測量方法主要有平臺支反力法、吊起法、懸掛法、搖擺法。平臺支反力法需用專用設備,投資大,普及率低;吊起法由于角度變化較小,質量反應引起的軸荷也較小,所帶來的誤差較大;懸掛法需要的設備較少,但是涉及懸掛后進行量尺寸等工作,存在難以計算出質心的問題; 搖擺法所需設備復雜,不太適用于質量大、體積大的物體,其應用受到限制。
數字攝影測量技術運用多學科的理論與方法,如計算機技術、圖像處理、模式識別等,對被測物體圖像進行處理得到目標的空間三維坐標,進而完成對物體的形狀、位置、姿態等的測量。數字攝影測量技術具有三維測量精度高、自動化程度高等特點。
基于上述分析,本研究中提出了一種基于數字攝影測量技術的質心高度測量方法。該方法將懸掛法和數字攝影測量技術結合,利用懸掛法原理和數字攝影測量技術的高精度三維測量特點,進行質心高度測量。
2 數字攝影測量系統構成及作業流程
本研究中采用的數字攝影測量系統是通過一臺高分辨率數碼相機對被測目標進行拍攝,獲取目標的準二值數字圖像,對獲取的圖像進行處理后得到精確的空間三維坐標。
2.1 系統構造
數字攝影測量系統由一臺高精度專業測量相機、攝影測量人工標志、一把基準尺、一臺計算機和一套測量軟件組成。
1) 高精度專業測量相機,專業測量相機由普通數碼相機經過高精度標定被封裝起來用于高精度的三維測量。
2) 人工標志,在數字攝影測量中,物體本身的特征不足,需在被測目標上增加人工標志作為測量的特征點來完成測量過程,以進行高精度的測量和空間描述。
人工標志采用回光反射材料制作,可拍攝出背景環境暗淡、標志特征點清晰的“準二值圖像”,可以有效地與背景環境相區別。
本文中使用的人工標志分為測量標志和編碼標志。測量標志作為被測目標成像點,可提高測量精度、可靠性和測量效率。編碼標志帶有數字編碼信息,能夠實現對編碼標志的準確識別、定位和圖像的拼接。
3) 高精度基準尺,基準尺的兩端各固定一個人工標志點,測量前已標定2個標志點間的距離,在測量過程中提供長度基準。
4) 數據處理軟件,軟件主要功能模塊包括像點精確定位、編碼標志識別及定位、圖像匹配及拼接、光束法平差、結果分析以及圖形顯示等。
2.2 系統作業流程
數字攝影測量系統作業流程如圖1所示。該系統采用專業測量相機,在不同的位置和方向拍攝目標圖像,經標志識別與中心定位、圖像匹配、光束法平差后得到目標標志點三維坐標。
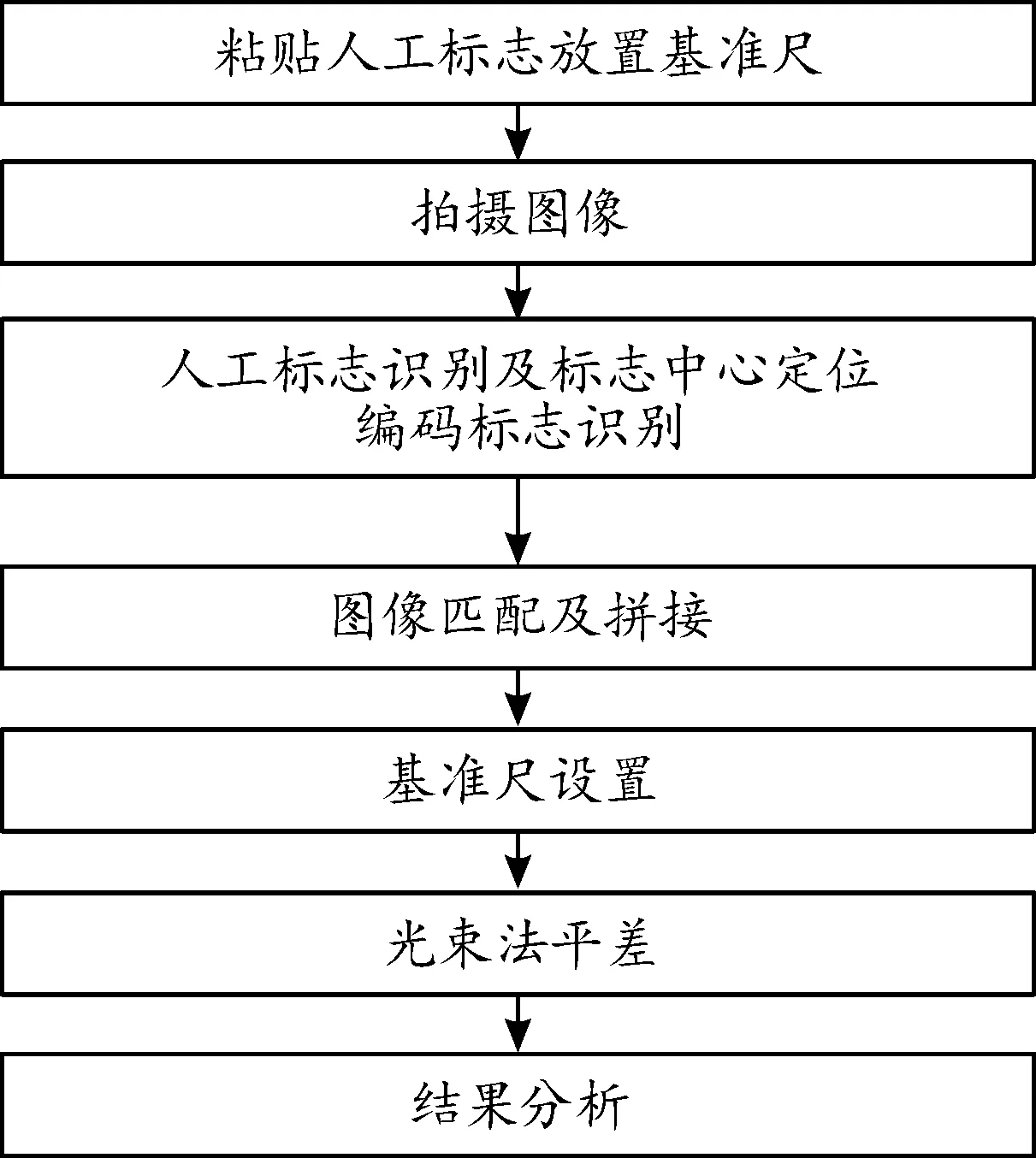
圖1 數字攝影測量系統作業流程框圖
1) 人工標志識別與標志中心高精度定位
本研究中使用圓形人工標志,因此被測目標空間三維坐標實際上就是圓形人工標志中心坐標。在圖像拍攝中,圓形標志點所成的像會發生一定的偏移形成橢圓,圓形標志中心即為橢圓圖像中心。橢圓中心定位過程有:提取橢圓圖像邊緣,根據圖像邊緣對標志圖像進行判斷和識別,最后進行最小二乘擬合確定標志中心的精確位置。
a) 圖像邊緣檢測
采用Canny算子進行邊緣檢測,Canny算子產生單像素邊緣,對噪聲不敏感,適合提取橢圓形邊緣。
b) 圓形標志識別
經過Canny算子處理后的圖像含有虛假邊緣和非標志邊緣,需要對邊緣和邊緣內的像素進行判斷,從而實現對圓形標志的識別。通過幾何條件,如尺寸、邊緣像素數(周長)、形狀因子(圓形度)來檢驗圖形是否符合標志圖像標準。
c) 人工標志圖像中心高精度定位
采用最小二乘橢圓擬合方法,利用標志圖像邊緣點的坐標求出橢圓5個參數,計算出橢圓中心坐標。橢圓方程表達式為:
+2++2+2+1=0
(1)
可利用最小二乘橢圓擬合求得橢圓方程的系數、、、、。
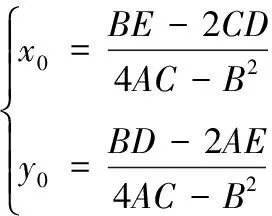
(2)
式(2)中,(,)為擬合橢圓中心坐標。
2) 編碼標志識別
研究中采用的編碼標志是點狀編碼標志,點狀編碼標志識別可以看作兩幅圖像中點集的匹配問題。編碼標志中固定幾個點為編碼標志的設計模板點,識別方法是在圖像中找到模板點的圖像點,通過仿射變換把圖像中的點恢復到設計坐標系下,求出仿射變換參數;然后利用仿射變換參數恢復模板點周圍的編碼點的其他像點;最后與設計坐標相比較,對編碼點進行解碼得到編碼標志的編碼。
3) 圖像匹配
使用具有規則形狀的人工標志點,在圖像匹配之前對其像點進行了精確定位,圖像匹配只需要確定同名像點(即同一標志點在不同像片上的像點)即可。針對數字攝影測量的特點,文中使用的方法是基于核線約束條件的匹配。
核線原理可知,如果知道一張圖像上某個物方點的像點,那么在其他圖像中該像點的對應像點必在其對應的核線上。如果己知圖像方向參數的準確值或近似值,則對應核線就可以計算出來,像點匹配范圍就由二維匹配轉化為一維匹配。
圖2為多攝站對應核線示意圖,其中、和為各攝站鏡頭光學中心,、和為像平面,、和為像主點,′、″和?為物方點的對應像點,和為像點′在和上的對應核線。

圖2 多攝站對應核線示意圖
4) 自檢校光束法平差
確定出不同像片上的同名像點后利用光束法平差就可以解算出物方點精確坐標。光束平差法是以每條光束為基本單元,以像點坐標為觀測值,由共線方程列出基本誤差方程,在整個區域進行平差處理,對相機內外參數、空間點坐標等進行優化求解的過程。
3 火炮質心高度求解過程
根據在完全起吊并靜止的情況下,起吊物的質心必然通過起吊點垂線的懸掛法原理,結合數字攝影測量技術測量質心高度位置。
采用不同懸掛長度的吊鎖對火炮沿橫向軸旋轉不同角度起吊的情況下,通過數字攝影測量技術獲取在火炮坐標系下的鉛錘線上測量標志空間坐標,根據所得到的空間點坐標擬合得到鉛垂線方程,最后聯立各條鉛垂線直線方程,求解得到火炮質心高度位置。
1) 在火炮表面粘貼測量標志和編碼標志,放置基準尺。
2) 建立火炮的坐標原點和坐標系。坐標原點確定在右后車輪中心;軸線(橫坐標):通過原點,垂直于右前車輪軸心線的水平直線,指向前方;軸線(縱坐標):通過原點,確定在后車輪軸心線,面對行駛方向指向右方;軸線(高度坐標):通過原點,垂直水平面的直線,指向上方;質心位置表示為,如圖3所示。
3) 火炮懸吊。在懸吊點處掛上一根粘貼5個測量標志的鉛垂線,這條線就是火炮的吊點垂線。保持懸吊點的空間位置不變,改變懸吊角度。在不同的懸吊角度下拍攝火炮和鉛垂線上標志點圖像。圖3表示2種不同懸吊姿態下的火炮狀態。
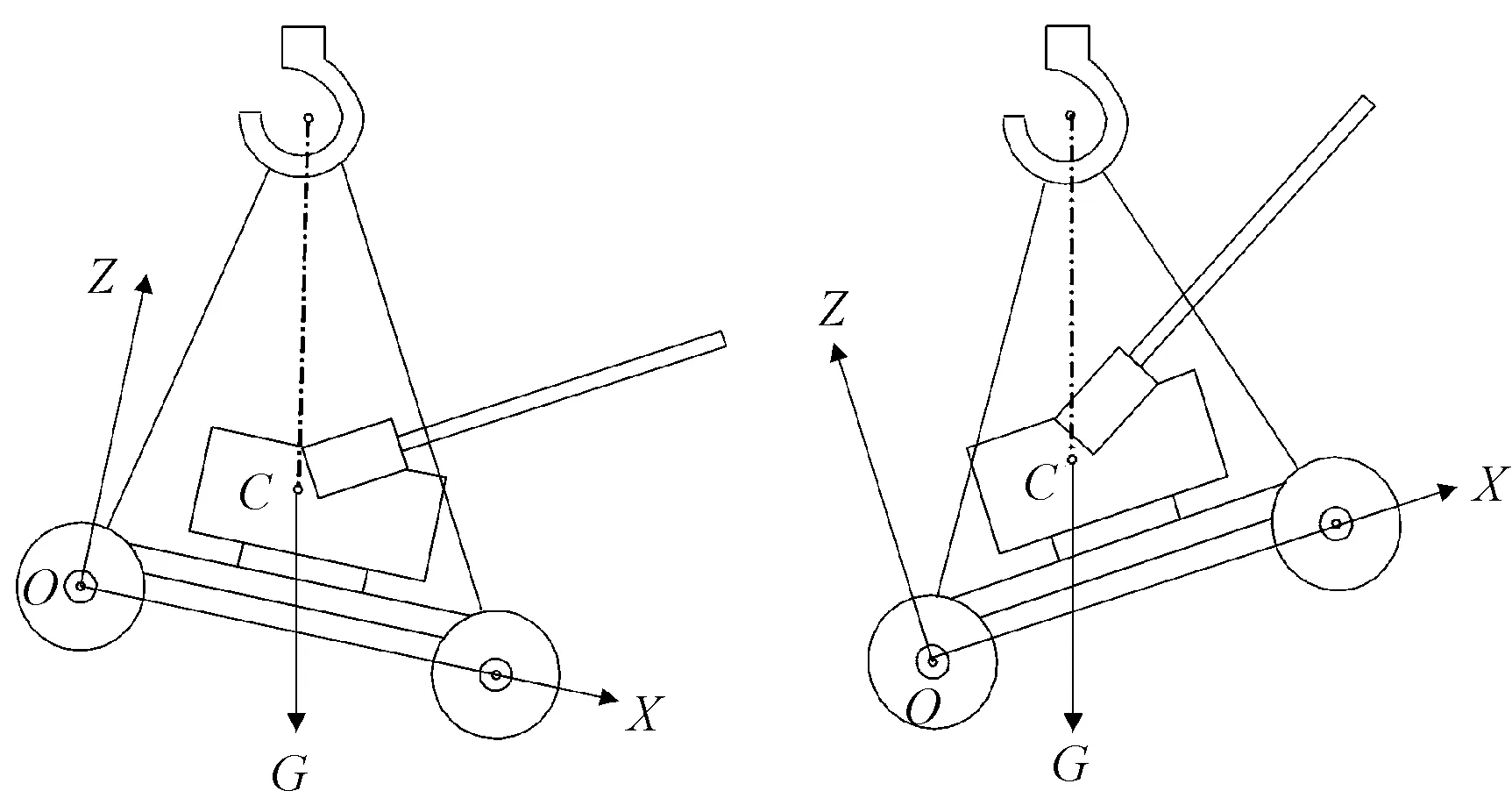
圖3 火炮懸吊姿態示意圖
4) 鉛垂線擬合。每一次懸吊完成后,用專業相機從不同的角度和位置對火炮及鉛垂線進行拍攝,對獲取的圖像進行處理,解算出各標志點在火炮坐標系下的空間坐標。獲取鉛垂線上粘貼的5個測量標志點三維空間坐標后,采用最小二乘法擬合成一條空間直線。
5) 質心高度計算。獲取不同懸吊角度下鉛垂線空間直線后,利用所有鉛垂線都會相交于火炮質心原理,聯立兩條鉛垂線空間直線方程,求解得到火炮的質心高度坐標,如圖4所示。
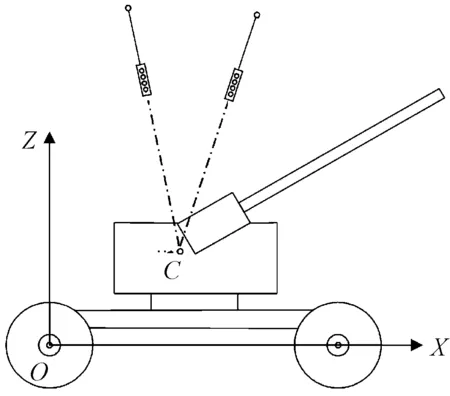
圖4 火炮坐標系下標志點狀態示意圖
4 試驗驗證
本文中以某型高炮為例進行試驗驗證。首先要完成人工標志的粘貼,包括鉛垂線上的5個測量標志點,盡可能使鉛垂線上的標志點中心在同一條直線上并且使這條直線與鉛垂線平行。然后是坐標系的定義,目標坐標系的建立原則要符合國軍標規定且標志點的空間三維坐標易于讀取。
整個試驗過程中,保持火炮懸吊后靜止不動,減少外界環境對火炮的擾動,以保證成像清晰度和測量精度。
4.1 參數設定
1) 測量相機
使用尼康D810數碼相機,相機分辨率為7 360pixels×4 912pixels,每個像素尺寸為4.9 μm。鏡頭參數已事先在實驗室進行標定,攝影時使用環形閃光燈作為外部光源,并進行封裝。
2) 尺度基準
在測量中使用兩端具有圓形回光反射標志、距離已進行精確標定的基準尺作為基準尺度。基準尺長度為600 mm,標定精度為0.003 mm。
2.2.2 NIHSS 評分 納入研究中 11 篇[3,8‐9,12,14‐18,20‐21]報道了溶栓前后NIHSS評分變化情況,各研究間無異質性(P=0.29,I2=16%),采用固定效應模型進行Meta‐分析(圖2)。結果顯示標準劑量組溶栓后NIHSS評分減少值大于低劑量組,差異有統計學意義(SMD=0.27,95%CI=0.14~0.40,P<0.001)。
3) 攝站布設
由于現場空間條件的限制以及火炮尺寸大等原因,火炮整個表面不能在相機里完全成像,每張圖像只能采集到的火炮的一面或一部分,需要通過編碼標志來實現對所有測量圖像的拼接。分別從不同位置和方向拍攝火炮圖像200余張,每張圖像之間的重疊度保持在80%以上。
4.2 試驗結果
通過測量相機對懸吊后的火炮進行圖像信息采集,得到鉛垂線上測量標志點在相機中的圖像信息圖如圖5。
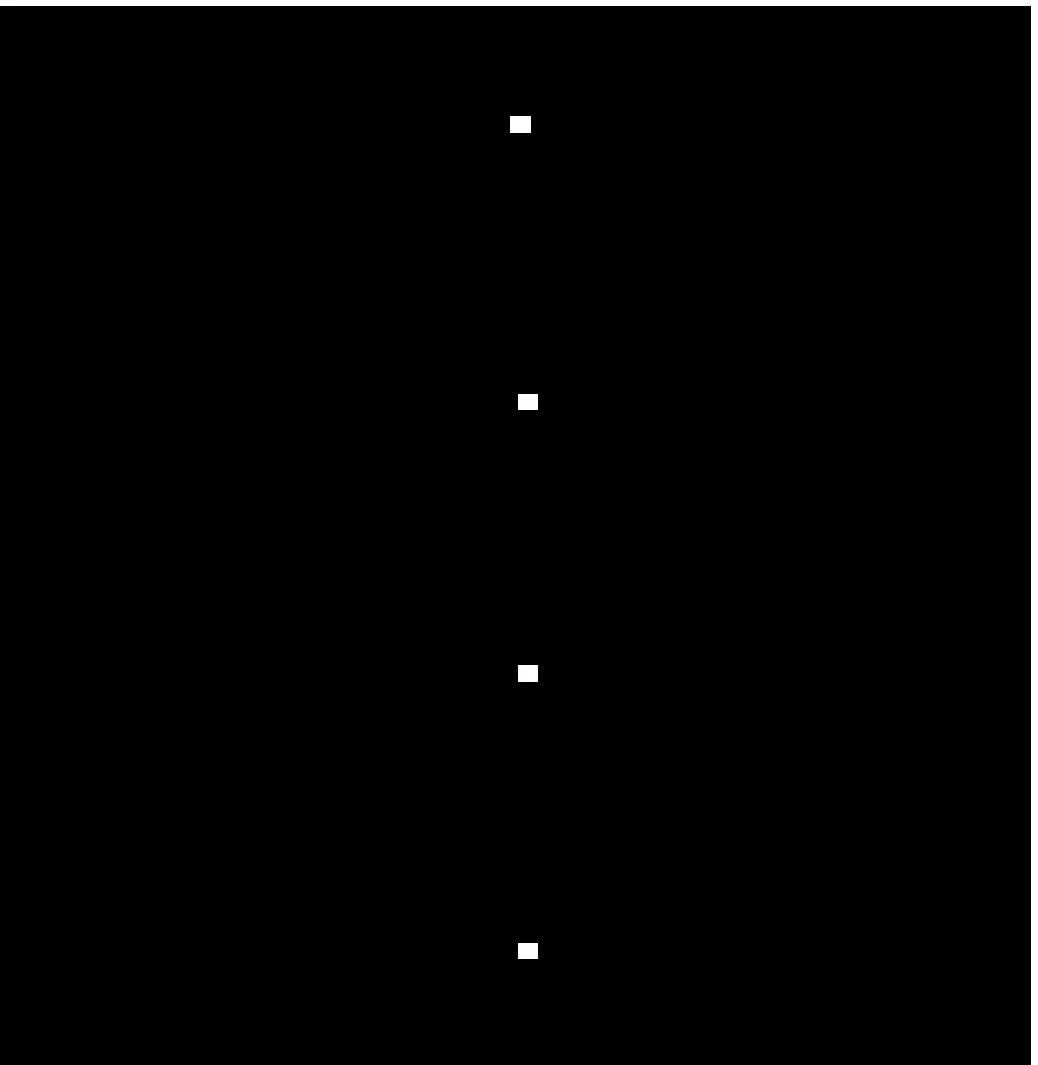
圖5 鉛垂線標志點圖像信息圖
測量質心高度坐標需要2個懸吊姿態下的標志點坐標,標志點在火炮坐標系下測量得到的坐標值見表1所示。
根據最小二乘原理,對2種不同懸吊姿態下的鉛垂線標志點坐標值進行空間直線擬合,具體結果見圖6所示。
4.3 試驗結果比對分析
根據工程實踐經驗可得,平臺支反力法所測量質心高度精度能夠保持在10 mm以內。因此,將平臺支反力法的試驗結果作為質心高度坐標的參考值進行比對。2種試驗方法得到的測量結果如表2所示。
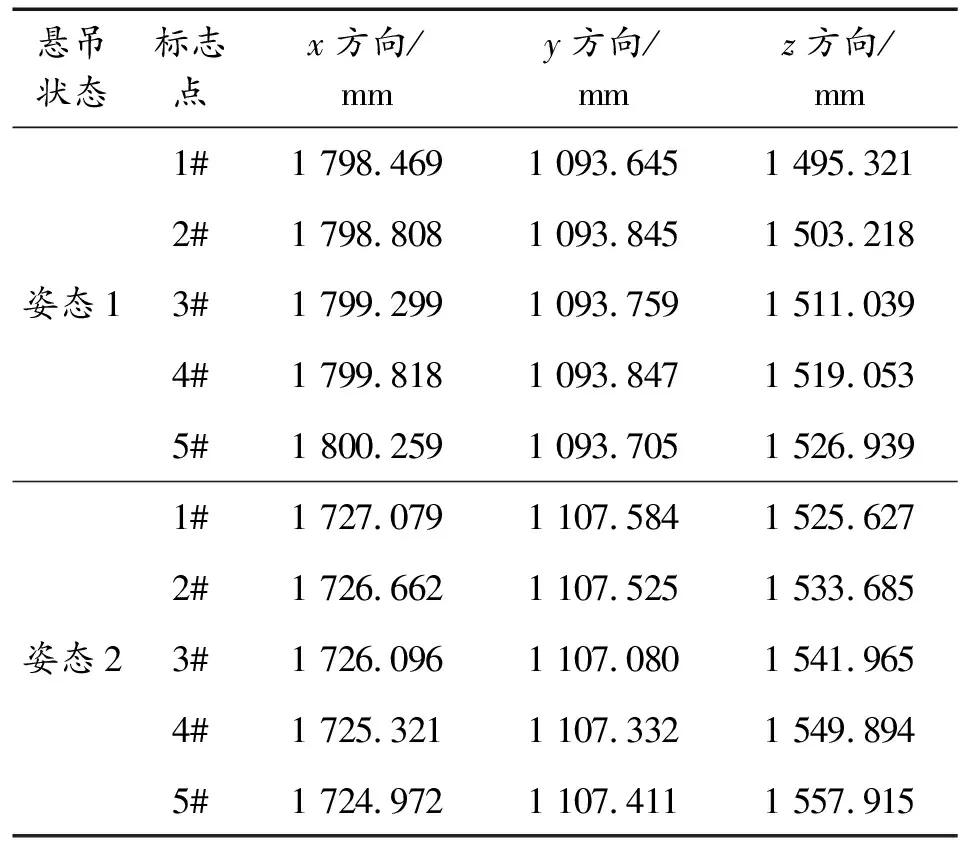
表1 鉛垂線標志點在火炮坐標系下的坐標值
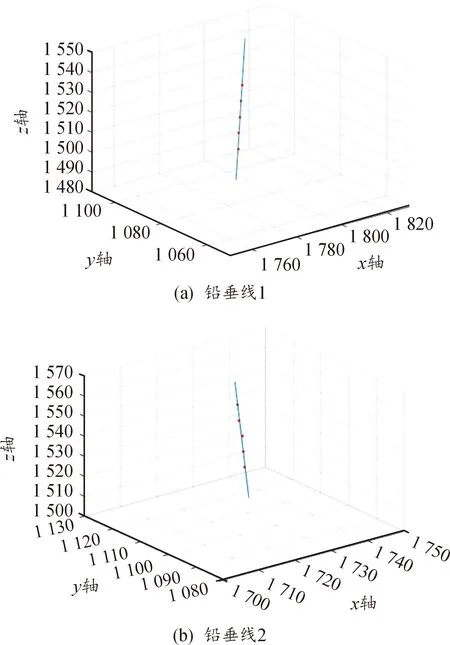
圖6 鉛垂線空間擬合圖

表2 測量結果
從表2可以看出,火炮的質心高度坐標誤差在13 mm左右,誤差的主要來源如下:
1) 由于吊鉤、吊具本身的質量引起的誤差。火炮起吊后,攝影測量方法所求出的質心高度是起吊物包括高炮、吊鉤、吊具的整體質心高度,在今后的試驗中加以研究。
2) 鉛垂線上測量標志引起的測量誤差。鉛垂線直徑為20 mm,測量標志是粘貼在鉛垂線表面上的,擬合直線與鉛垂線的中心線有一定的誤差,也需在今后的試驗中加以研究。
3) 相機采樣誤差。該誤差在毫米級以內,可忽略不計。
4) 外界環境對目標和鉛垂線特征點的擾動所造成的誤差。
以上試驗結果驗證了本研究中方法的合理性和算法的有效性,為火炮的側翻角和射擊極限穩定角的計算保證了精度要求。
5 結論
提出了基于數字攝影測量技術的火炮質心高度測量方法。該方法根據懸掛法原理,結合數字攝影測量技術,在不同的懸吊角度吊起火炮進行火炮質心高度測量。
1) 懸掛法需要的設備較少,不需要質心測量平臺、地中衡等專用測量設備,但是難以測量懸掛后的火炮尺寸。數字攝影測量技術可通過對獲取的被測目標圖像進行處理后得到精確的空間三維坐標,并利用空間三維坐標解算質心高度,不需要人為地測量尺寸。因此文中方法能夠很好地解決以往質心高度測量中測量設備及測量參數過多的問題,對配有起吊裝置的火炮及裝備較為合適。
2) 文中方法與傳統方法對比,在自動化程度上明顯占優。與平臺支反力法進行比較,通過誤差分析,驗證了本文方法的合理性和可行性,滿足測量精度要求,是質心高度測量方法有意義的探索,有著較高的實用價值。
3) 文中方法還存在吊鉤、吊具本身的質量和鉛垂線上測量標志等引起的測量誤差,在后續過程需要不斷研究、優化和改進。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
