基于運行軌跡的車輛異常行為監測與研判
2022-07-26 07:54:00趙昱博屈新明
今日自動化 2022年6期
趙昱博,屈新明
(深圳城市交通規劃設計研究中心,廣東深圳 518000)
隨著我國工業化進程不斷推進,人員、貨物的區域間流動增長迅速,道路監管壓力和事故安全風險不斷加大,實時交通運行監控及安全保障工作變得愈發重要。車輛異常行為檢測是交通運行安全監管中重要的一環,及時發現行為異常的車輛并持續跟蹤監測,同步采取相應的管理處置措施,對于降低道路安全風險、規避交通運營事故具有重要的現實意義。
車輛行為檢測方法多樣,傳統方式如地感線圈等應用廣泛,但此類方法局限于車輛在離散點位的基礎動態特征,收集到的信息較為有限,且設備需要定期更換;各類傳感器,如雷達、激光等可以針對性監測多種車輛行為,但受限于代價昂貴,目前尚未整體普及。同時,當交通流中存在多種違法類型時,傳統檢測方法常常力不從心,漏檢、誤檢時有發生,使其越來越不適應當前交通管理的應用趨勢。
以車輛運行GPS 軌跡為基礎,融合卡口圖像識別算法軌跡為輔助修正,從時間、空間兩個維度對融合后的車輛運行軌跡進行挖掘,評估車輛行為特征。基于不同類型交通違規行為畫像擬合不同車型軌跡運行特質,實時監測判別車輛駕駛安全風險,在降低成本的同時,提升了對道路運行違法行為的監測效率。
1 軌跡獲取及處理流程
基礎軌跡數據由GPS 設備在車輛移動過程中上報匯集所產生,該數據包含多維度特征,涉及日期、時刻、定位、速度等基礎信息,數據示例如表1所示。
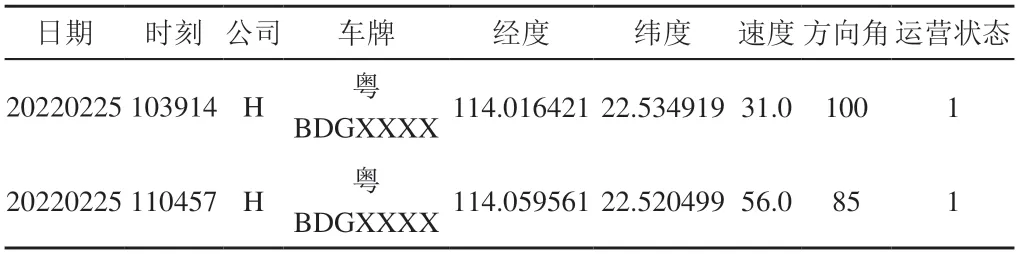
表1 出租車GPS數據示例
由于受信號遮擋、干擾等原因的影響,GPS 軌跡中存在部分數據缺失的情況,直接對這些異常的軌跡數據進行處理勢必會影響結果準確性和決策的可靠性。GPS 軌跡補全的主要思想為插值,基于軌跡數據特點,應用最近鄰插值算法可以較為準確地對缺失的采樣點進行插補,從而恢復出車輛完整的時空軌跡。
除了基礎的GPS 軌跡,通過卡口視頻進行數據采集,應用圖像處理方法進行車輛軌跡提取,可以獲得精準的離散軌跡數據。目前,基于圖像處理進行車輛軌跡提取的方法的較多,文章應用計算機視覺中的Yolo3算法進行車輛軌跡提取。初步提取的軌跡數據可能存在諸多跳躍、平滑性差等缺點,應用KCF 目標跟蹤算法基于歷史軌跡數據對當前數據幀進行預測匹配,可以較好地解決目標檢測丟失和遠行無法檢測到車輛等問題。
多個卡口處的離散數據通過車牌與GPS 軌跡相關聯,作為樣本車輛數據的補充,對基礎軌跡中部分異常、缺失的點位予以清洗補全,使得車輛軌跡在時間維度上進一步細化,并進一步提升了與路網空間特征的契合程度。
2 車輛異常行為分析
基于軌跡數據實際應用,主要研究以下幾種異常駕駛行為類型,如表2所示。
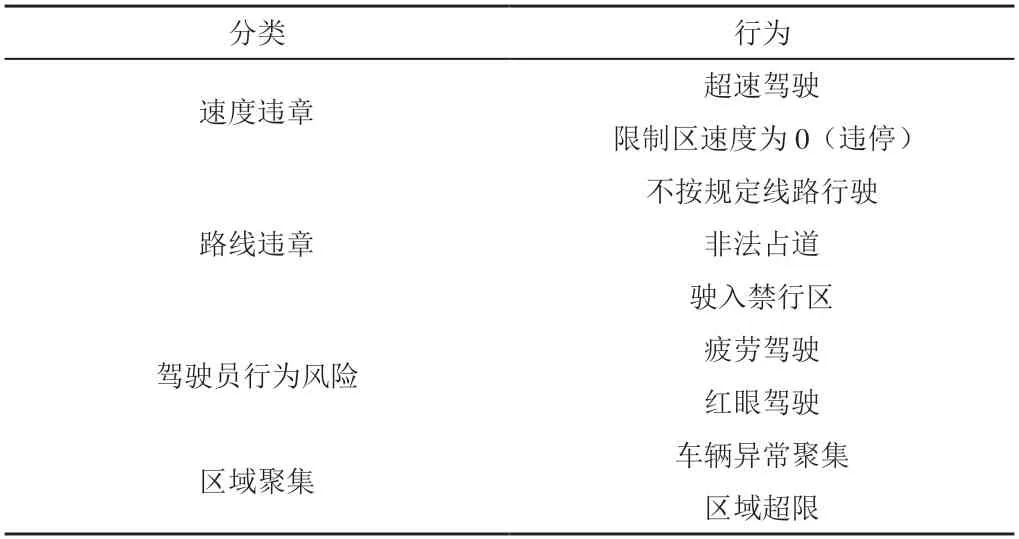
表2 出租車GPS數據示例
表2中,速度違章表示目標車輛在某時間段的行駛速度與當前路段或區域的設定規則不符;路線違章則表示目標車輛的行駛軌跡違反了所在道路或區域的設定;駕駛員行為風險主要集中于長時間疲勞駕駛及部分車型于夜間的紅眼駕駛;區域聚集包括重點車型在特定區域的數量超限,以及隨機發生的車輛異常聚集行為。
為減少軌跡數據偏差對分析結果造成的影響,文章采用較為經典的地圖匹配解決方案S-T MapMatching。該類算法基于隱式馬爾可夫模型,從概率的角度計算可能路徑的觀測概率,選取概率最大的路徑作為最終的匹配結果。該方案只應用于部分異常行為分析中,如駛入禁行區、疲勞駕駛等對空間位置精度要求較低的異常檢測可以忽略此步。
整體分析流程如圖1所示:

圖1 分析流程圖
2.1 速度違章分析
通常速度違章表示車輛的當前行駛速度違背了路段或區域的設定規則。超速違章一般為持續性的,從軌跡數據的地圖打點來看,離散、偶發的速度高于設定閾值的情況通常不足以作為判定超速行駛的依據。在執行地圖匹配后,車輛行駛速度指標與路段最小單元的通過時間、單元長度相綁定,單個點位的速度應服從于路段整體運行速度的判定。
對于一段連續的行駛軌跡,目標車輛往往會途經多段不同道路等級,即多段不同限速的路段,將軌跡與道路等級相關聯,精細化分析車輛在不同限速路段上的超速等級分布,有助于定量分析不同車輛類型、不同時間范圍、不同道路節點的違章成因,挖掘潛在風險點。如圖2所示,目標車輛先后經過主干路—支路—高速路—支路—快速路共4種道路類型,吻合圖中最高限速閾值曲線的車輛速度曲線即可作為判定持續超速違章的依據。
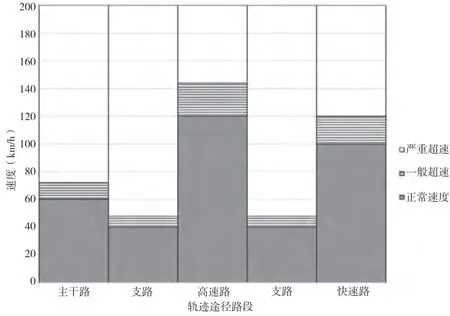
圖2 軌跡超速分析
2.2 路線違章分析
路線違章指目標車輛的行駛軌跡與既定規則不符,既定規則可以基于道路或是區域,車輛行駛軌跡未與指定路段重合,抑或是駛入了禁行區域;規則也可細化至車道級,如非法占用公交車道等行為。地圖匹配賦予了每輛車行程軌跡的唯一關聯路段集,對于“未按規定線路行駛”項來說,在將路段規則進行標定后,可以實時、快速地獲取車輛的違規信息。非法占道的判別需借助精細化的GIS 路網,并同時滿足3個特定要求:特定時段駛入特定車道的特定車型。基于軌跡的路線違章判別方法整體側重于對地理數據的把握,不同規則主導下的定量、精細化控制構成了對應特征分析的核心。

圖3 未按規定線路行駛軌跡示例
2.3 駕駛員行為風險分析
疲勞駕駛的行為特征可概括為:重點車輛具有在特定時段長時間連續行駛的軌跡特征。紅眼駕駛則強調客車的夜間駕駛行為。對于以上二者來說,軌跡分析側重于對時間點的精準把握,基于插值后的軌跡數據滿足時間粒度的分析要求,可以直接作為中間數據予以量化分析。疲勞駕駛的核心在于駕駛與休息時間的判定,當車輛處于停止狀態時,可應用決策樹等方法基于停駐點區域類型對駕駛員行為(是否休息)作分類判別。
2.4 區域聚集分析
以區域異常聚集為例,常用的分析方法為DBScan 密度聚類算法,基于同時間段車輛點位經緯度作區域密度分析,篩選大于設定閾值的區域,結合區域地理位置、周邊用地等信息對該事件類型做出判斷,并及時通知相關部門進行跟蹤處理。出于交通事故告警、突發事件處理及疫情防控的需要,區域聚集的實時性需求較高,同時也對數據可靠性提出了一定要求。基于GPS 及卡口數據互補的治理策略較好的彌補了單一數據源的數據質量短板,在實際應用中發揮了較高的應用價值。

圖4 插值后的軌跡時空圖
2.5 統計數據結果
基于文章方法,對深圳市某區域15:00—21:00時段的車流進行測試,車型包括出租車、百度導航車、客運班車、泥頭車等共計7種,有效樣本共計33256輛,區域內包含所有等級類型道路。測試結果如表3所示。因未接入全類型車輛數據,測試結果略有偏差。

表3 出租車GPS數據示例
3 結束語
以車輛運行GPS 軌跡為基礎,融合卡口圖像識別算法軌跡為輔助修正,從時間、空間兩個維度對融合后的車輛運行軌跡進行挖掘,評估車輛行為特征,基于不同類型交通違規行為畫像擬合不同車型軌跡運行特質,實時監測判別車輛駕駛安全風險。經過實際測試,該方案在降低成本的同時有效提升了對道路運行違法行為的監測力度。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
