基于無跡卡爾曼濾波的無刷直流電動機無位置傳感器控制
2022-07-11 13:34:42馬相如楊澤斌
微特電機 2022年6期
馬相如,楊澤斌
(1.國網漣水縣供電公司,淮安 223400;2. 江蘇大學 電氣信息工程學院,鎮江 212013)
0 引 言
無刷直流電動機(以下簡稱BLDCM)的傳統位置傳感器控制方法,增加了硬件成本和體積,且位置傳感器易受電磁信號、粉塵等干擾,使得控制性能下降。目前BLDCM常用的無位置傳感器控制方法包括反電動勢法、磁鏈觀測法、續流二極管導通檢測法、擴展卡爾曼濾波法等,其中擴展卡爾曼濾波法是卡爾曼濾波在非線性系統中的擴展,其利用較容易獲得的電壓、電流信號,結合BLDCM狀態方程,實現對轉子位置和轉速信號的觀測,具有魯棒性好、調速范圍寬等優點,是目前BLDCM無位置傳感器控制研究的熱點。但是這種方法是通過泰勒展開式逼近非線性函數,由于僅保留到一階精度,觀測到的轉速和轉子位置信號誤差較大[1-2]。
為了提高擴展卡爾曼濾波器觀測的精度,本文提出了一種改進的無跡卡爾曼濾波(以下簡稱UKF)算法,相較于擴展卡爾曼濾波算法,可有效提升估算精度。UKF沒有忽略高階項,最低可達到非線性函數的二階精度,因此具有更高的估算精度。本文將其應用于BLDCM轉速和轉子位置觀測中,實現了BLDCM無傳感器控制[3-4],仿真和實驗結果證實了理論分析的正確性。
1 BLDCM數學模型
本文的BLDCM為三相星形連接,采用全橋逆變器驅動、兩兩導通方式,其連接示意圖如圖1所示。

圖1 BLDCM連接示意圖
理想情況下,BLDCM電壓方程如下:
(1)
式中:ua、ub、uc,ia、ib、ic,ea、eb、ec分別為定子繞組相電壓,相電流,反電動勢;R、L、M分別為每相繞組電阻、自感和相間互感。
BLDCM電磁轉矩方程如下:
(2)
式中:ω是角速度。
BLDCM運動方程如下:
(3)
式中:J、Bv、Tl分別為轉動慣量、摩擦系數和負載轉矩。
2 UKF算法原理
2.1 卡爾曼濾波算法分析
卡爾曼濾波器結構如圖2所示,其采用遞歸方法在考慮外部干擾的情況下仍然能夠獲得最優估測值,并且便于數字化實現,在導航制導、信號處理等領域應用廣泛。

圖2 卡爾曼濾波器系統結構圖
卡爾曼濾波器工作原理如下:控制系統的狀態變量同時輸入至系統模型和卡爾曼濾波器模型,系統模型估測值與卡爾曼濾波器模型估測值作差后,由卡爾曼濾波器模型估測出最優值,再將其反饋至卡爾曼濾波器模型,通過不斷遞推與迭代,最終估計值收斂于接近真實值的范圍。
系統的狀態方程和量測方程如下:

(4)
式中:x(k)為系統狀態向量;Φ(k+1,k)為轉移矩陣;H(k)為測量矩陣;w(k)和v(k)分別為系統本身和測量過程中的干擾信號。
w(k)和v(k)的統計特性如下:
(5)
系統初值的統計特性如下:
(6)

(7)
根據上面的結果求出卡爾曼濾波增益Kk:
(8)

(9)
最后計算迭代過程所用最優估測方差矩陣Pk:
Pk=Pk/k-1-KkHkPk/k-1
以上的卡爾曼濾波算法分析是基于線性模型,而實際系統多為非線性模型,為了彌補卡爾曼濾波算法不適應非線性系統的缺陷,提出擴展卡爾曼濾波算法(以下簡稱EKF),先對非線性系統線性化變換,再作離散化處理。然而,傳統EKF方法在對非線性系統方程進行線性化處理時,只具有泰勒級數的一階精度,導致誤差較大。在實際應用中,需要對EKF方法進一步優化。以確定性采樣為思路,Julier等學者進一步將無跡變換與EKF算法相結合,提出了UKF算法,它具有更高的估測精度。
2.2 無跡變換
對于任意非線性系統,其非線性函數可用下式表示:
y=f(x)
(10)
無跡變換[5-6]過程如下:
首先,選取合適的Sigma點χi,實際選擇過程中可參考下式:
(11)

其次,對2n+1個Sigma點作非線性傳播,如下:
yi=f(χi) (i=0,…,2n)
(12)
計算可得:
(13)

2.3 UKF算法原理
UKF算法主要利用比例無跡變換替換EKF算法中的雅克比矩陣,從而實現非線性系統的線性化變換,其遞推過程主要包括4個步驟[7-8]。假設存在某非線性系統,離散化表示如下式:
(14)
式中:xk代表系統狀態向量;uk代表輸入向量;σk、μk代表相互獨立的高斯白噪聲,且滿足下式關系:
(15)
第一步初始化。計算初始狀態統計特性如下式:
(16)
(17)
第二步采樣。根據Sigma點的選取規則,取2n+1個Sigma點,并計算其權值:

(18)
第三步時間更新。利用非線性狀態函數f(·)對采樣中所得Sigma點作非線性傳播,如下:
(19)
進而可得:
(20)
(21)

(22)
式中:α值通常在0.000 1~1內,β值通常等于2。

(23)
(24)

(25)

(26)
進一步可得:
(27)
式中:Kk代表濾波增益矩陣。
根據新的測量yk即可進行量測更新:
(28)
(29)
3 UKF在BLDCM中的應用
BLDCM非線性數學模型如下:

(30)
式中:x(t)代表狀態變量;u(t)、y(t)分別代表輸入、輸出變量;δ(t)代表系統擾動、轉速波動、參數誤差等所有系統噪聲;μ(t)代表測量噪聲。
各變量方程如下:
為了將本文研究的UKF算法運用到BLDCM控制中,需進一步對BLDCM系統方程作離散化處理,結果如下:
(31)
根據上式,結合前文分析的UKF原理,可得基于UKF算法的BLDCM無傳感器算法實現流程,如圖3所示[9-10]。
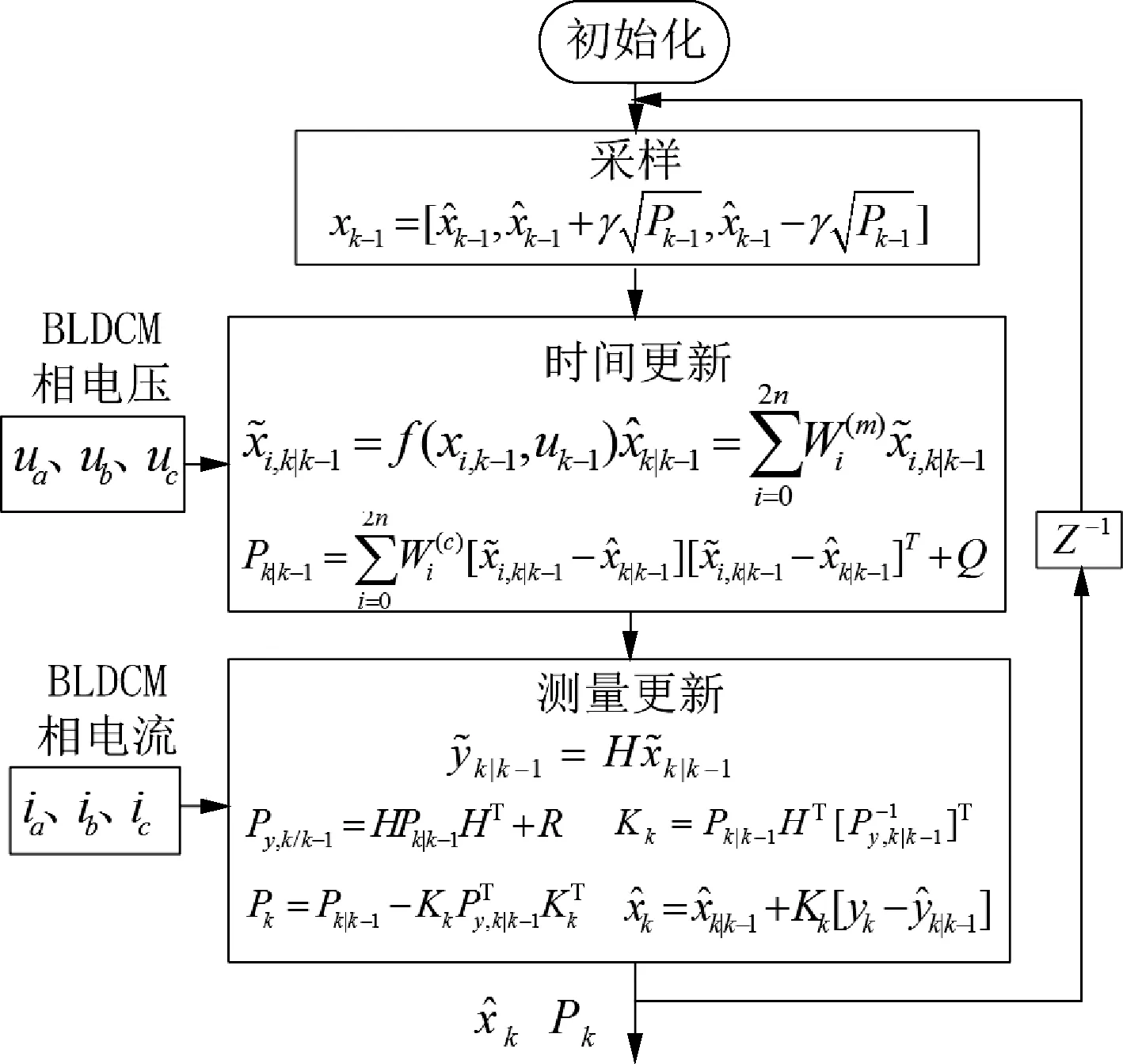
圖3 UKF算法實現流程圖
進一步可得BLDCM基于UKF算法的無位置傳感器、雙閉環控制結構框圖[11-12],如圖4所示。

圖4 BLDCM基于UKF算法的雙閉環控制
控制系統采用無跡卡爾曼濾波器觀測得出轉速和轉子位置信號,并將其應用于BLDCM轉速、電流雙閉環控制中。
4 仿真分析
利用MATLAB軟件自帶的S函數功能模塊編寫UKF算法,并嵌入到模型中,搭建MATLAB仿真模型,BLDCM仿真參數如表1所示。

表1 仿真參數
針對不同轉速、轉速發生突變、負載發生擾動三種情況進行仿真。
4.1 不同轉速下仿真分析
當BLDCM給定轉速分別為2 000 r/min和200 r/min時,UKF觀測與實際測量的轉速和轉子位置分別如圖5、圖6所示。需要說明的是UKF算法得到的轉子位置信號是連續的角度,在BLDCM驅動控制中還需要對其進行轉換,轉換原理如圖7所示。
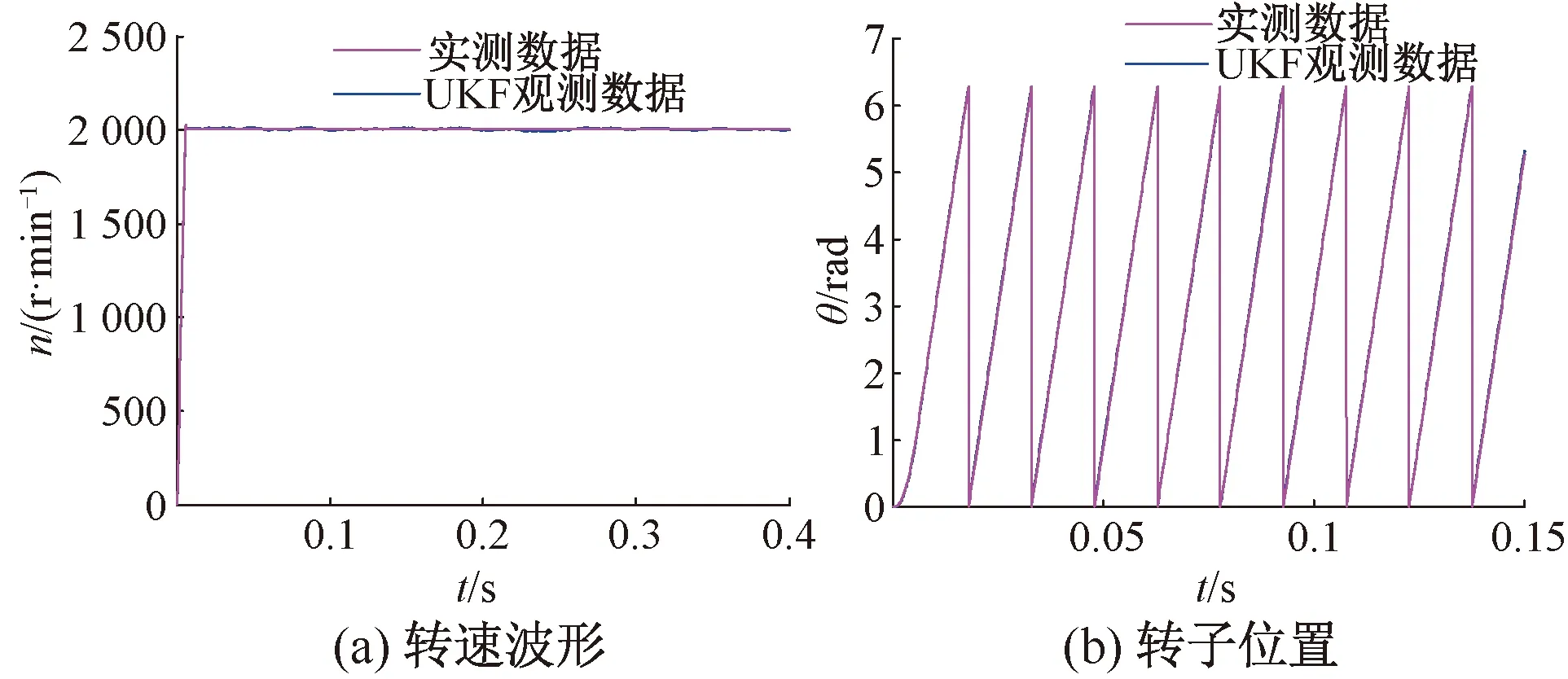
圖5 給定轉速為2 000 r/min時仿真結果

圖6 給定轉速為200 r/min時仿真結果
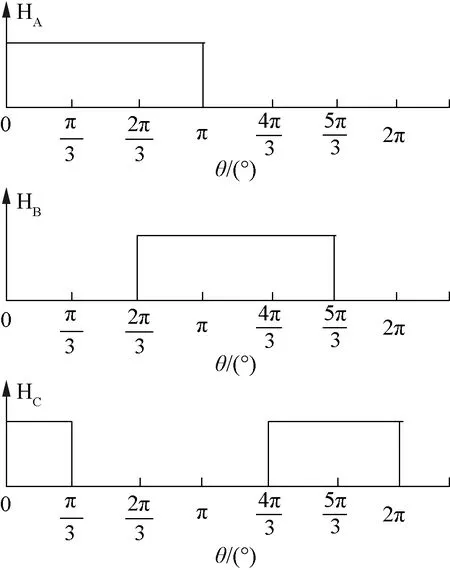
圖7 UKF算法獲取轉子位置轉換原理
由圖5、圖6可見,高、低速情況下UKF觀測與實際測量的轉速和轉子位置之間誤差較小,且高速時的觀測精度優于低速情況。
4.2 轉速發生突變時仿真分析
初始狀態下BLDCM給定轉速為1 500 r/min,0.1 s時轉速突增至2 000 r/min,UKF觀測與實際測量的轉速和轉子位置如圖8所示。

圖8 轉速發生突變時的仿真結果
由圖8可見,轉速發生突變時UKF觀測器仍能夠準確觀測轉速和轉子位置,觀測精度較高,與實際測量值之間誤差較小,動態觀測效果良好。
4.3 負載發生擾動時的仿真分析
初始狀態下負載轉矩為0.66 N·m,0.1 s時負載轉矩開始增大,0.15 s時達到最大值0.96 N·m,之后逐漸恢復至0.66 N·m,UKF觀測與實際測量的轉速和轉子位置如圖9所示。
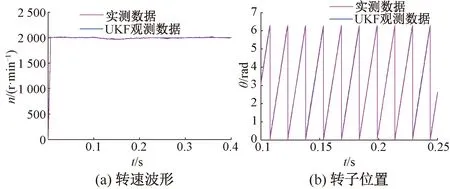
圖9 負載發生擾動時的仿真結果
由圖9可見,當負載轉矩發生擾動時,UKF算法仍然能夠準確觀測轉速和轉子位置,具有較好的抗負載擾動能力。可見,UKF算法可以實現BLDCM高、低速無位置傳感器控制,且在轉速發生突變、負載發生擾動等情況下,仍然能夠準確觀測轉速和轉子位置,具有較好的動、靜態性能及觀測精度。
5 實驗研究
為進一步驗證理論分析的正確性,基于DSP28335+FPGA的控制器結構進行實驗驗證,實驗現場接線如圖10所示。

圖10 實驗接線圖
實驗主程序、定時器中斷子程序及捕獲單元中斷子程序流程圖如圖11所示。
實驗所用BLDCM參數與仿真參數一致,BLDCM空載起動過程中電壓、電流波形如圖12所示。
由圖12可見,由于電機電感、換相及小功率BLDCM齒槽效應等原因,空載狀態下電流波形并不是理想的方波。
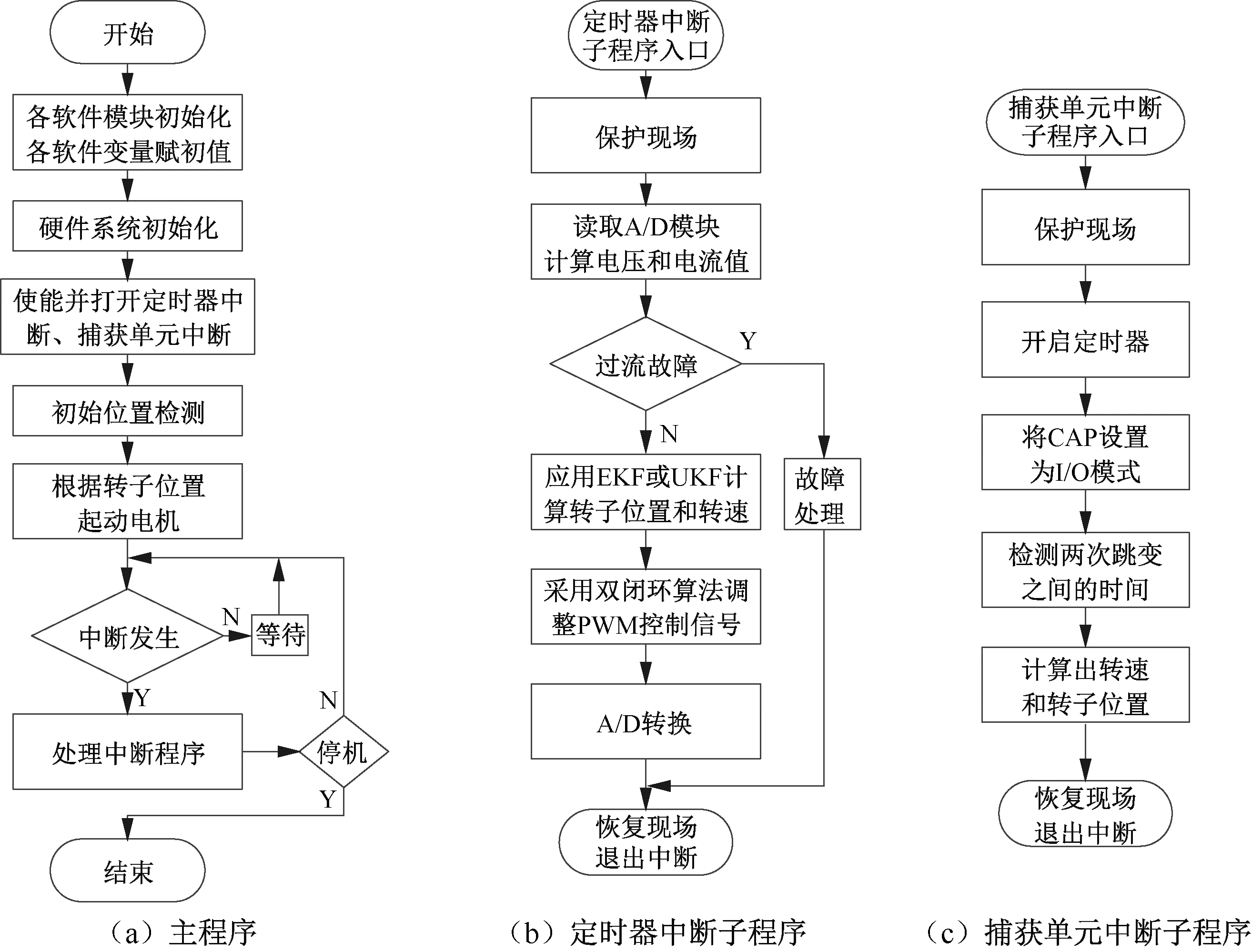
圖11 程序流程圖
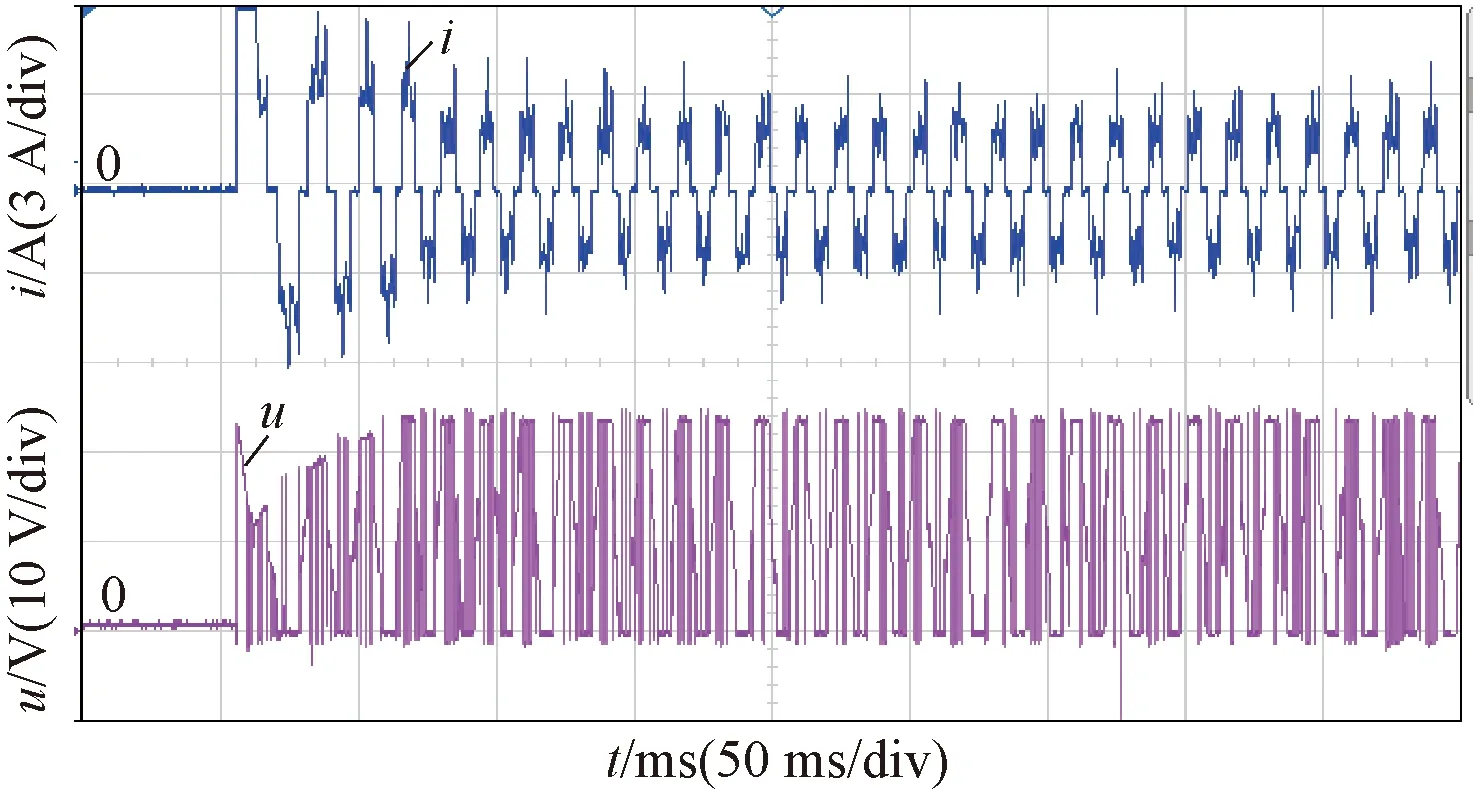
圖12 BLDCM電壓、電流波形
為了比較UKF估測的轉子位置與實際轉子位置間差異,本文同時采用霍爾傳感器進行實測。然而霍爾傳感器輸出信號并不是連續的角度,而UKF輸出信號是連續的角度,難以直接對比。因此,本文按照圖7的霍爾傳感器輸出脈沖信號與轉子位置之間關系對UKF輸出結果進行轉換。
當BLDCM轉速分別為200 r/min、2 000 r/min時,霍爾傳感器實測轉子位置信號與UKF觀測轉子位置信號轉換后波形如圖13所示。

圖13 轉子位置測量結果
由圖13可見,無論BLDCM工作在高速或者低速狀態,UKF算法觀測的轉子位置與霍爾位置傳感器測量結果基本一致,二者之間誤差較小,可見UKF算法具有較高的轉子位置觀測精度。
在DSP28335中UKF觀測的轉速信號和實際轉速信號均為數字量,若采用示波器顯示,則需要將其轉化成模擬信號,而在數模轉換過程中會受到噪聲干擾等產生誤差,影響判斷結果。為了避免此問題,本文將UKF觀測的轉速和實際轉速分別存放在兩個變量中,再通過MATLAB繪制出來進行分析。
當BLDCM給定轉速分別為2 000 r/min、200 r/min時,UKF觀測轉速與實際轉速如圖14所示,由于轉速是根據CCS中數組變量繪制而來,圖中橫坐標是數組變量的下標值。

圖14 實際轉速與UFK觀測轉速
由圖14可見,在高、低速情況下BLDCM起動初期UKF算法觀測轉速與實際轉速之間存在一定誤差,經過短暫收斂后,轉速趨于穩定,UKF算法觀測轉速與實測轉速基本一致,誤差較小。
當給定轉速由1 000 r/min增至2 000 r/min時,UKF觀測轉速與實際轉速如圖15所示。
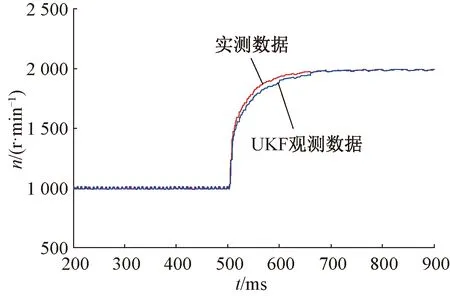
圖15 轉速突變時實際轉速與測量轉速
由圖15可見,當給定轉速參考值發生突變時,UKF算法仍可以準確跟蹤并觀測轉速,且與實際測量值之間誤差較小。
由以上實驗結果可見,基于UKF算法的BLDCM無位置傳感器控制方法具有良好的動、靜態性能,能夠有效提高BLDCM轉速、轉子位置的觀測精度,具有一定的推廣應用價值。
6 結 語
針對擴展卡爾曼濾波器算法觀測精度不夠高的問題,本文提出了一種改進的UKF算法。相較于EKF算法,UKF算法可有效提升估算精度,將其應用于BLDCM無位置傳感器控制中,理論證明UKF算法至少可以達到非線性函數的二階精度。仿真和實驗結果表明,UKF算法在BLDCM高、低速運行情況下,均可以準確觀測轉速和轉子位置,并且在轉速、負載轉矩發生突變時,仍然能夠準確跟蹤觀測,具有較好的動、靜態性能和觀測精度。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
家庭影院技術(2017年9期)2017-09-26 03:41:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電源技術(2016年9期)2016-02-27 09:05:39