大交會角約束下非線性系統三維能量最優制導律*
2022-07-11 09:01:52祝月徐俊艷王曉東宋勛王蒙一
現代防御技術 2022年3期
關鍵詞:模型
祝月,徐俊艷,王曉東,宋勛,王蒙一
(北京電子工程總體研究所,北京 100854)
0 引言
隨著各國軍事力量和科學技術的不斷發展,過去單一飛行器之間的攻防對抗已經不能滿足當前的作戰需求。在當前信息化作戰的背景下,為了提高打擊精度和打擊效果,多彈協同打擊多目標的作戰方式開始興起[1],并逐漸成為各國的研究熱點。
在多彈協同打擊多個目標的作戰場景中,各導彈的發射時間受攔截弧段的影響不能任意給定,因此需要采用多彈齊射的方案[2]。多彈齊射的制導律設計問題需要考慮諸多約束[3]。首先,為避免前方導彈擊中目標時的光電效應對傳感器瞬間失靈的影響以及避免碰撞產生的碎片干擾,各導彈間的交會角要形成較大的差異。第二,為保證攔截精度,需要使得脫靶量盡可能小。同時,為保證工程可實現性,還需要使全程的能量消耗盡可能小。
根據國內外學者的相關研究,考慮交會角和脫靶量共同約束的制導方法可以總結為滑模變結構控制法(SMC)、最優控制法,以及剩余時間多項式擬合法(TPG)等三大類[4]。文獻[5-6]針對靜止和低速目標設計了一種二維滑模制導律,在控制交會角的同時,能夠使制導指令在交會前收斂到0。文獻[7-8]針對導彈速度為常值及目標靜止的情況提出了一種考慮末端脫靶量和交會角約束的二維最優制導律。其中,損失函數用能量代價除以剩余飛行時間的冪指數表示,而后通過求解線性二次型得到制導律的最終表達式。該論文通過計算導彈運動軌跡曲線對剩余飛行時間進行估計,提高了對脫靶量控制的精度。還有學者[9-10]提出將制導指令作為剩余飛行時間的多項式(TPG)的制導方法,通過構造制導指令多項式各項的系數來滿足交會角和脫靶量的約束。這種方法簡便易行,同時過載的形式簡明直觀,便于對其進行約束。
通過對國內外現狀的比對和分析,可以總結出當前研究存在的幾點問題。首先,現有的研究主要集中在導彈速度恒定和目標靜止的情況[11-12]。這種情況下制導狀態方程的設計和求解相對簡單,同時也容易求解出較為精確的剩余飛行時間,其脫靶量和角度偏差都會比較小[13]。然而,在協同打擊高速非機動目標這一場景下,不但目標是高速運動的,導彈速度的大小通常也是時變的[14]。解決這種情況下制導律的設計問題對于工程應用十分必要。另外,現有制導律大多是基于二維場景提出的。對于三維制導律,尤其是大交會角約束下制導律的設計和分析存在較大欠缺。
為解決上述問題,本文針對多個導彈協同打擊多個高速非機動目標的背景,將多對多制導律設計問題展開成多組一對一基本單元的制導律設計問題,提出了一種適用于彈目高速運動場景下的三維制導律。該制導律可以同時滿足脫靶量、交會角和交會時間等多個約束,并且能夠降低制導過程的能量代價,具有較強的理論意義和工程價值。
1 問題描述及模型建立
1.1 問題描述及假設
在本文研究的基于協同場景下多對多打擊高速非機動目標的場景中,導彈間的信息交換用于提高導彈的抗干擾能力和目標的捕捉概率,而各個導彈制導指令的生成是相對獨立的。在打擊過程中,母彈升空后在一定的位置釋放出子導彈,形成多組多對一或一對一的防御網絡。假設導彈的反應時間和狀態調整時間忽略不計。認為導彈和目標所受空氣阻力忽略不計。在攔截過程中,目標受重力作用做高速非機動運動,導彈受重力和垂直于彈體方向的法向過載共同作用。
1.2 彈目相對運動模型
三維空間內的攔截幾何如圖1 所示。
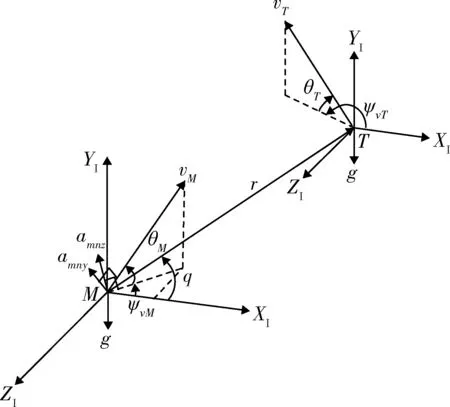
圖1 三維空間內彈目攔截幾何Fig.1 Three-dimensional dynamics of missile and target
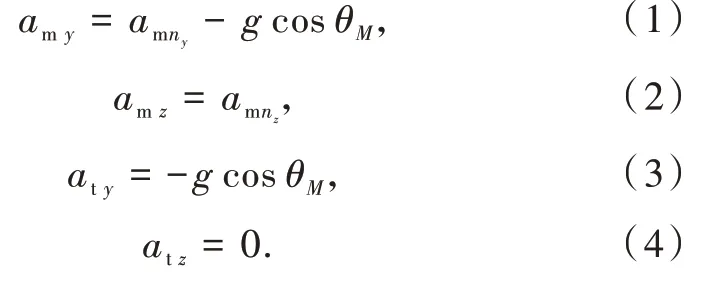
OXIYIZI是以發射點為原點的慣性坐標系。r和q分別是彈目相對距離和視線角。vM,θM,ψvM以及vT,θT,ψvT分別是彈目速度、彈道傾角和彈道偏角。導彈和目標都受重力加速度g的作用,此外,導彈還受發動機施加的法向過載的作用。該過載在彈道坐標系中垂直于速度方向的的投影為amny和amnz。則導彈和目標在三維彈道坐標系實際的法向加速度amy,amz,aty,atz可表示為
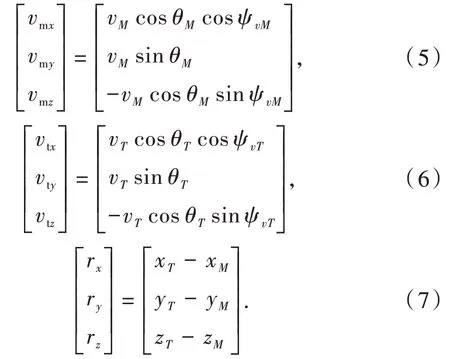
導彈和目標的速度及彈目相對距離在三維發射 點 慣 性 坐 標 系 內 的 投 影vmx,vmy,vmz,vtx,vty,vtz,rx,ry,rz可以表示為
將三維空間分解成鉛垂和水平2 個二維平面,通過分析2 個平面內的運動,建立2 個平面相互耦合的狀態方程[9]。2 個平面內的彈目相對運動幾何分別如 圖2~3 所示。圖 中,vmxy,vtxy,rxy,vmxz,vtxz,rxz分別是vM,vT,r在OEXIYI平面和OEXIZI平面上的投影。
圖2 鉛垂面彈目攔截幾何Fig.2 Dynamics on vertical plane

則導彈與目標機動的動力學方程為


圖3 水平面彈目攔截幾何Fig.3 Dynamics on horizontal plane
1.3 制導模型
1.3.1 解耦模型的問題
傳統的運動學模型通常將水平面和鉛垂面解耦考慮[15]。即,在考慮一個平面內的運動時,認為另一個平面內的彈道角瞬時不變,并且導數為0。此時amy和amz可以分別由OEXIYI和OEXIZI內的制導律生 成。OEXIZI平 面內,的 表達式為
可以發現,在式(14)~(15)的求導過程中沒有考慮和項,即認為θM和θT是瞬時不變的。
OEXIYI平面同理。
在本文研究的多個導彈協同打擊高速運動的目標場景下,為保證攔截精度,部分導彈的交會角可能會非常大。在這種情況下,臨近交會前彈道角的變化速率很大,會導致較大的脫靶量和角度偏差。因此,解耦模型在大交會角情況下并不適用。
1.3.2 三維耦合制導模型
針對解耦模型的問題,本節提出了一種將鉛垂面和水平面耦合考慮的三維制導模型。選取系統的狀態變量為
可以得到系統的狀態空間表達式為
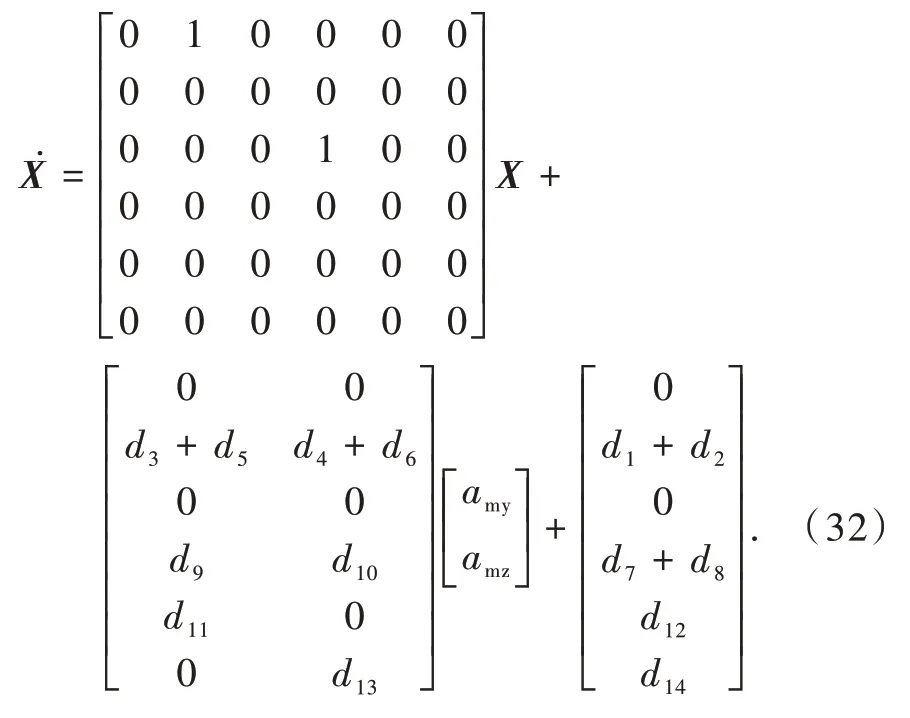
2 制導律設計
本小節將以三維耦合制導模型為基礎,設計一種考慮交會角和脫靶量共同約束的三維能量最優制導律。三維能量最優制導律的損失函數如下:

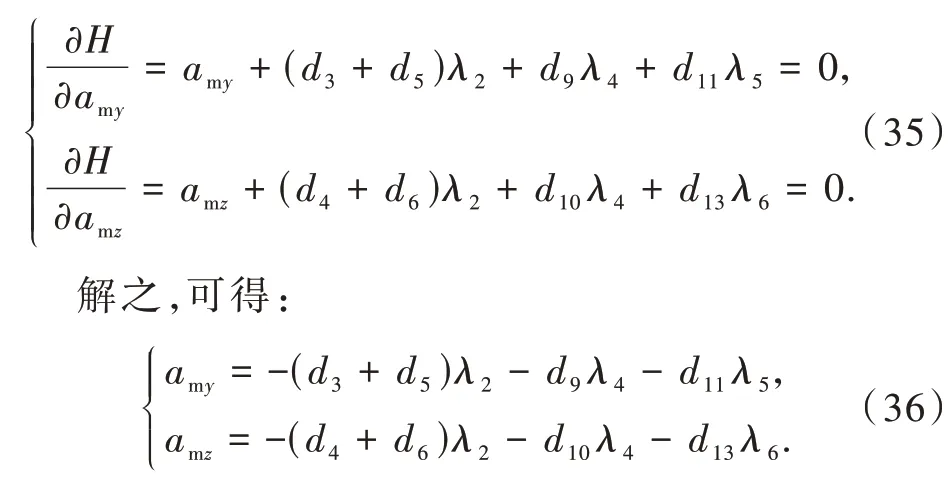
式中:amy,amz為三維彈道坐標系中導彈實際的法向加速度,可以得到哈密爾頓函數為

代入狀態方程并對控制變量求偏導,得到系統的控制方程:
系統的終端狀態x1(tf),x3(tf),x4(tf)和x6(tf)固定,x2(tf),x4(tf)自由。這是一個終端狀態部分固定系統的制導律設計問題。系統的協態方程為
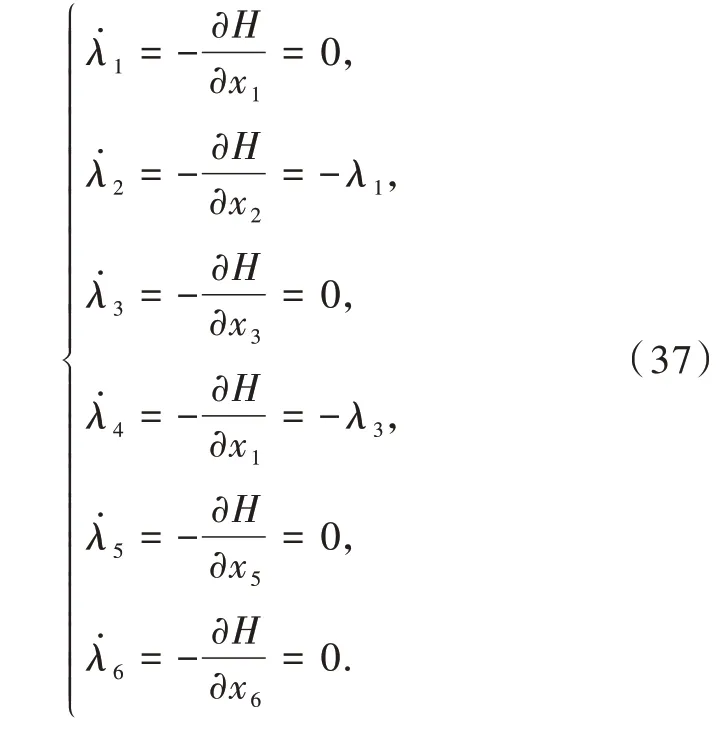
求解協態變量,可得:
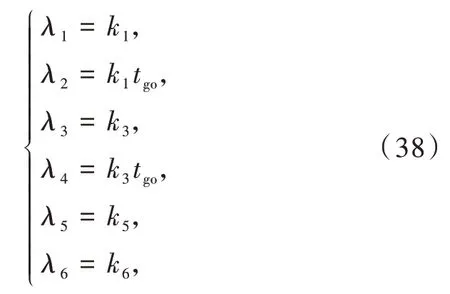
其中,k1,k3,k5,k6為待求參數。可以得到過載的最終形式:

其中,tgo=tf-t表示剩余飛行時間,需要根據當前時刻的彈目相對距離r和視線方向的相對速度r?估計:

只要求解出系統的終端狀態k1,k3,k5,k6,便可以得到系統的控制輸入。接下來將利用系統的終端狀態x1(tf),x3(tf),x4(tf)和x6(tf)來求解這2 個未知參數。系統的終端狀態可以表示成:
其中,

Φ(tf,t)為系統的狀態轉移矩陣。采用歐拉積分,可以將式(41)化簡為
利用偽逆函數pinv,可以求出未知參數K:

代入式(39),即可得到導彈在彈道系下實際法向加速度amy,amz的數值解。根據式(1),(2)可以得到彈道系下垂直于速度方向的控制指令amny,amnz。通過坐標變換,將amny,amnz轉換到彈體坐標系,得到實際的過載指令。amny,amnz到彈體坐標系下過載amyq,amzq的轉換關系為

式中:av項是垂直于彈體方向的過載在導彈速度方向上的分量。據此解出:
考慮av影響后的速度變化率為

3 仿真校驗
本節將通過仿真分析,驗證制導律對脫靶量和交會角偏差控制的有效性。OEXIYI和OEXIZI平面上的零控脫靶量表達式為

能量消耗定義為

導彈在重力加速度下飛行,且受垂直于彈體方向的法向過載控制。目標僅在重力加速度作用下飛行。模型解算周期為0.001 s,制導周期0.02 s。末端期望交會傾角和交會偏角范圍取-35°~35°。制導的初始條件見表1。圖4~6 為三維彈目運動軌跡和彈體系下的法向過載。
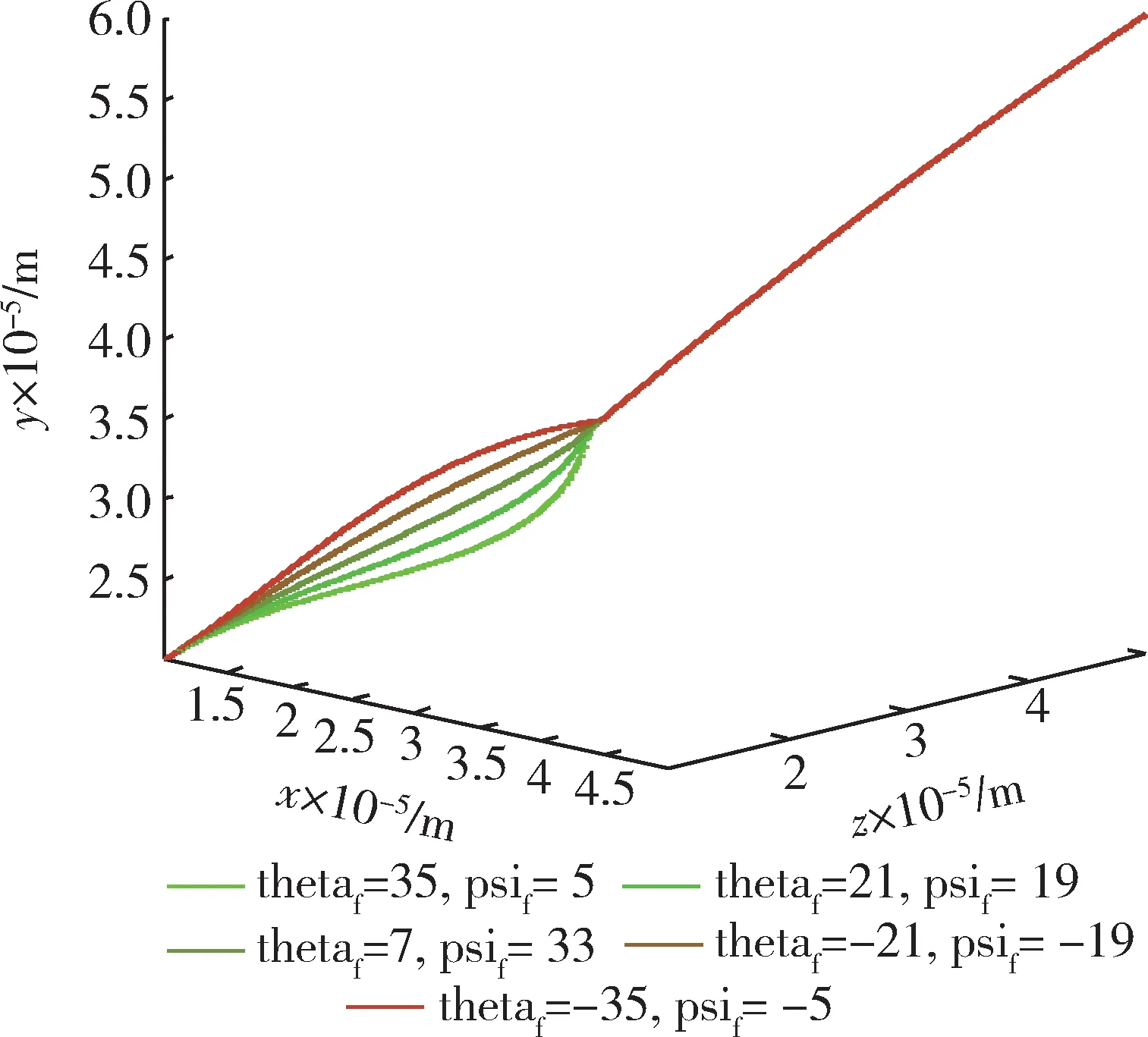
圖4 彈目三維運動軌跡Fig.4 Three-dimensional trajectories of missile and target

表1 選擇的初始值Table 1 Initial values
圖5 彈體系y 軸方向需用過載Fig.5 Normal load on y axis
表2 記錄了終端脫靶量、交會角偏差及總能量消耗。終端脫靶量的絕對值的范圍為0.000 013 m到0.234 181 m,交會角偏差的范圍為0.000 01°~0.000 22°,滿足攻擊時對脫靶量和交會角精度的要求。

表2 命中時刻狀態值Table 2 Values at impact time
圖6 彈體系Z 軸方向需用過載Fig.6 Normal Load on Z axis
接下來將對本文提出的耦合模型與解耦模型[9]進行對比和分析,以證明在大交會角情況下,耦合模型在脫靶量、交會角控制偏差和能量代價上的優越性。
基于文獻[9]建立的解耦模型,通過建立和求解最優控制的協態方程和橫截條件便可以得到amy和amz的 最 終 表 達式。,OEXIYI和OEXIZI平面上的損失函數可以分別表示為
選用表1 的初始值,設定模型解算周期0.001 s,制導周期0.02 s。末端期望交會傾角和交會偏角范圍取-35°~35°。得到解耦模型的終端脫靶量和交會角偏差,并將耦合模型的終端脫靶量和交會角偏差作為對比,記錄在表3 中。
表3 中的數據表明,在相同的交會傾角和交會偏角下,耦合模型的能量代價要明顯優于解耦模型,并且終端脫靶量和交會角偏差更小。當期望的交會傾角和交會偏角增大時,解耦模型的終端脫靶量和交會角偏差也會隨之增大。這個結果表明,在末端存在交會角約束,尤其是期望的值較大時,按照耦合模型推導的制導律要明顯優于解耦模型。
表3 命中時刻狀態值Table 3 Values at impact time
以上仿真考慮的為理想工況。接下來將在此基礎上,增加誤差干擾和最大過載限制,對交會角約束下的能量最優制導律進行仿真分析。各個量測量的誤差范圍如表4 所示。
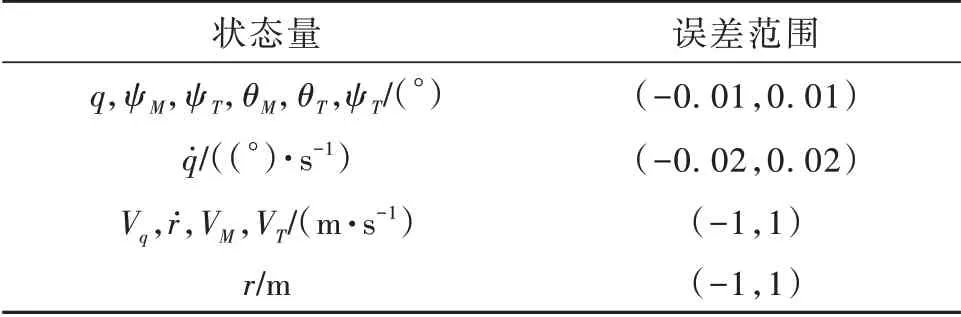
表4 量測誤差Table 4 Measurement error
將導彈的最大可用過載限制為10。仿真初值按照表1給定,交會傾角和偏角的范圍取-10°~ + 6°。模型解算周期為0.001 s,制導周期0.02 s。對表2中的5 組交會角分別計算1 000 條彈道,并將這5 000次仿真及指標取絕對值,計算其均值和標準差,記錄在表5 中。
根據表5 記錄的數值,脫靶量絕對值的均值可以控制在0.750 m,標準差可以控制在0.297 m。此外,交會角偏差絕對值的均值可以控制在0.18°以內,方差可以控制在0.07°以內。由此可以得出,本文提出的制導律可以在有效地控制交會角的同時滿足命中的精度要求。
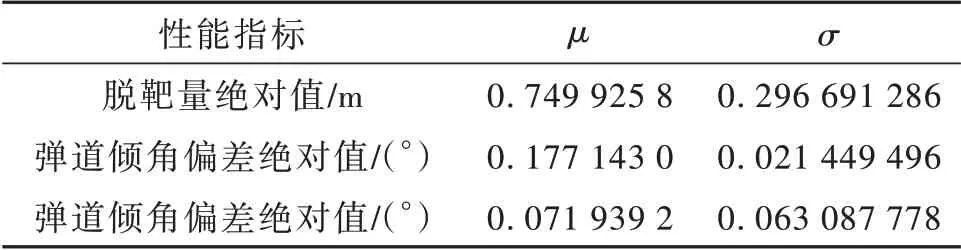
表5 性能指標統計值Table 5 Statistics of performance
4 結束語
本文對協同場景下導彈打擊高速非機動目標的三維制導律設計問題進行了研究,考慮了交會角、脫靶量、能量代價等復雜多約束的共同影響,解決了彈目高速運動引起的模型非線性為制導律設計帶來的困難,提高了大交會角情況下的脫靶量和交會角偏差控制的精度,實現了對每個目標的多角度同時打擊,具有較強的理論價值和實際意義。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19