上肢智能康復外骨骼的設計與仿真
2022-07-10 09:52:32管小榮
兵器裝備工程學報 2022年6期
馬 澤,管小榮,李 仲,李 燦
(南京理工大學 機械工程學院, 南京 210094)
1 引言
調查顯示,近年來腦卒中患病率逐年增高,且患者多伴有上肢功能康復障礙,而傳統康復手段不能達到很好的治療效果、康復成本較大,因此,構建一個能夠適應人體上肢康復自由度,具有多種康復訓練模式和科學評估模式,能夠根據患者康復階段自主調節康復訓練規劃的上肢智能康復外骨骼系統,對于上肢康復障礙患者具有重要意義。華盛頓大學研制了一款七自由度的上肢康復機器人CADEN-7,通過安裝六維力傳感器,實現基于軌跡跟蹤的阻抗控制,通過肌電傳感器獲取肌電信號和運動意圖,實現了被動、主動、半主動訓練模式[1]。瑞士皇家理工大學開發的基于末端效應器的ARMIN系列機器人,已有三代產品,能夠完成訓練時速度、力等信息的采集,實現被動、主動康復訓練模式[2]。華中科技大學設計的一款上肢康復機構,能完成被動模式、主動模式和肌電觸發3種模式下摸嘴、摸頭、摸左肩、摸右耳4組康復動作[3]。天津科技大學設計的一款基于力反饋加心率實時監測的雙臂六自由度上肢康復系統,可完成被動、主動訓練模式[4]等。由于目前多數康復外骨骼具有結構復雜、質量較大,美觀和舒適性較差的缺點,因此,擬設計一款在滿足康復主要需求前提下,結構簡單、輕便,能適應不同人群,且美觀、舒適性較好的上肢康復外骨骼結構,為擬設計的整體上肢康復外骨骼系統提供機械載體。本研究設計了一款能夠滿足康復系統要求上肢康復外骨骼結構,并對其進行了運動學、動力學分析,針對電機所受環境干擾及連續摩擦,進行了控制器的設計與仿真,來達到較好的跟蹤精度。
2 機械結構設計
2.1 設計需求
人體解剖學研究顯示,人體上肢是由多關節骨骼結構和復雜肌肉組織形成的綜合體(見圖1、圖2),主要包括3個部分:肩部、肘部和腕部,其中肩部運動主要包括肩關節前屈/后伸,外展/內收和內旋/外旋,共3個自由度;肘部運動主要有前屈/后伸和前臂內旋/外旋2個自由度;腕部包括前屈/后伸,外展/內收和內旋/外旋3個主要自由度。考慮到肘部、肩部2個大關節康復訓練效果更明顯和減小控制難度,取消了腕部康復自由度的設計。

圖1 肩關節運動示意圖Fig.1 Shoulder’s movement
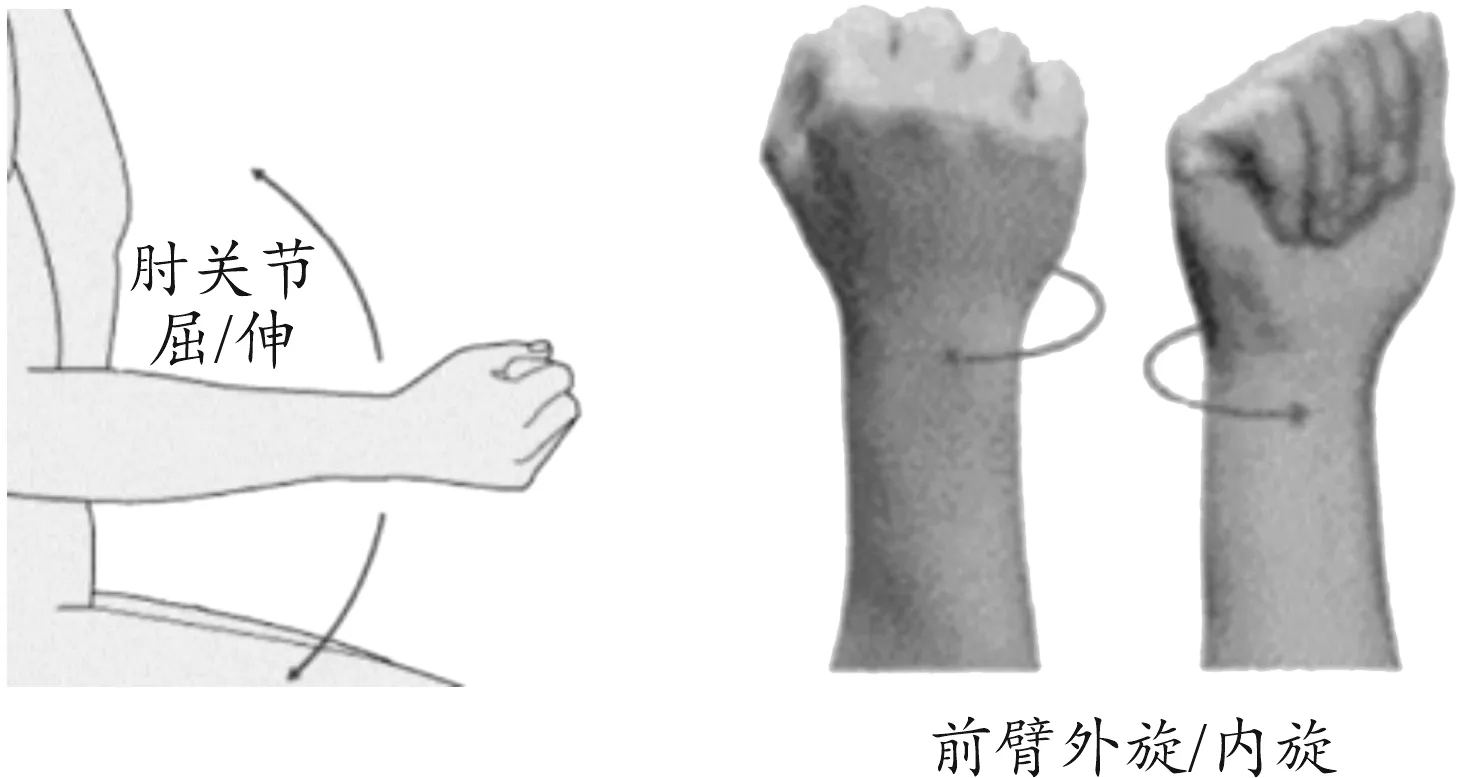
圖2 肘關節及前臂運動示意圖Fig.2 Elbow’s and forearm’s movement
2.2 長度調節
為適應不同人群的穿戴需求,外骨骼相關機構(大臂、小臂)的長度應該可以調節,使其具有一定的通用性,滿足不同穿戴者的身材。依據成年男性18~60歲群體人體尺寸參數(見表1),擬設計上臂調節長度在270~345 mm,前臂調節長度在200~260 mm,肩寬調節長度在330~420 mm。

表1 GB 10000—1988中國成年人人體尺寸(mm)Table 1 GB 10000—1988 body size of Chinese adults
2.3 結構設計
整體結構如圖3所示,結構設計主要遵從4個原則:自由度、通用性、舒適性和輕量化。

圖3 整體結構示意圖Fig.3 Overall structure
1) 自由度:結合患者群體主要康復需求與康復系統功能要求,設計的上肢康復外骨骼機器人具有4個自由度,前臂的內外旋、肘關節屈伸,肩關節屈伸、肩關節在一定角度下的外展內收和內外旋運動,驅動方面,前臂內外旋軸線在人體前臂內部,采用了電機驅動,齒輪傳動的方式,其余3個自由度均使用電機直驅。
2) 通用性:依據2.2小節中長度調節中設計的參數,對結構整體進行設計,且由于所設計結果整體質量與力矩較小和為了實現更加靈活的尺寸調節,結構使用了使用螺栓擰緊的無級調節方式,來滿足不同群體的康復需求。
3) 舒適性:考慮到病人訓練過程中的舒適性與機械機構整體的美觀性,大小臂結構部分均設計了護臂托持結構,該結構為傳感器的安裝提供了空間;結構整體設計了外殼與走線槽,并在患肢與結構接觸處(手部、前臂、大臂)設置了安裝綁帶,保證人體手臂與外骨骼結構貼合的舒適性與運動同步性。
4) 輕量化:外殼采用塑料材料進行3D打印,主體結構材料使用7075鋁合金,結構整體簡單、質量較小。
3 運動學分析
3.1 D-H運動學分析
圖4表示上肢康復外骨骼機械結構,針對所設計結構,簡化模型(見圖5),采用傳統D-H建模方法[5],在所有桿構件上建立坐標系后,按照坐標運動順序建立相鄰兩構件i-1與i之間的相對空間關系,即D-H坐標變換矩陣。
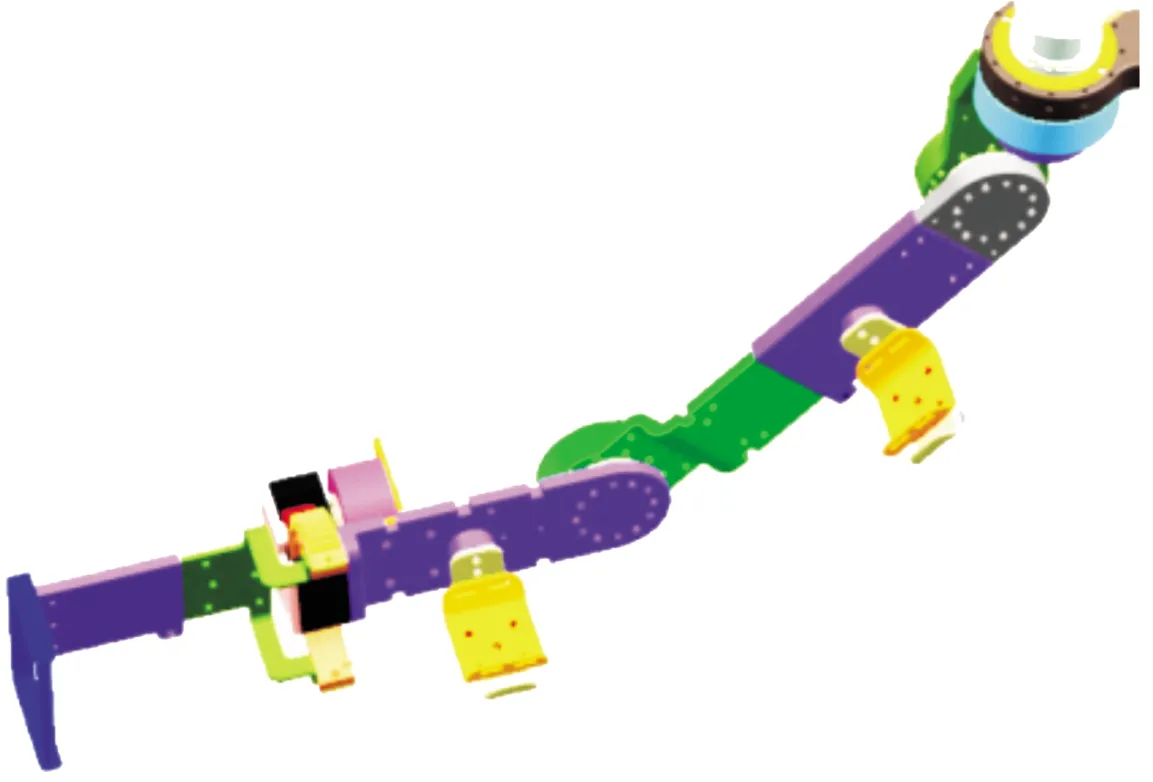
圖4 上肢康復外骨骼機械結構示意圖Fig.4 Mechanical structure of upper limb rehabilitation exoskeleton
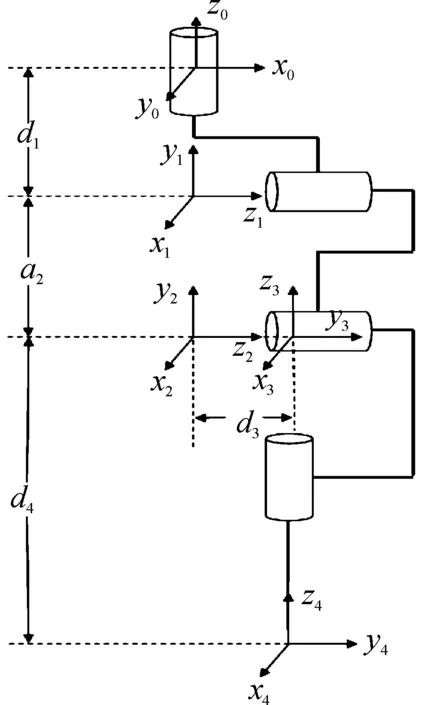
圖5 轉動副關節連桿的D-H模型結構示意圖Fig.5 D-H coordinates of rotating joint connecting rod
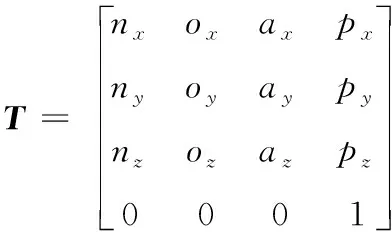
上述坐標運動都是相對于新坐標系的運動,因此連桿i關于i-1的坐標變換矩陣可用4個順序右乘的齊次變換A矩陣表示,記Ai表示連桿i關于連桿i-1的坐標變換A矩陣,則,
Ai=Rot(z,θi)Trans(0,0,di)Trans(ai,0,0)Rot(x,αi)
(1)
將式(1)展開后,整理得:
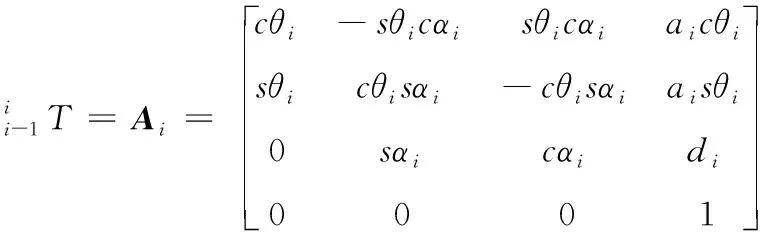
(2)
其中,cosθi=cθi,sinθi=sθi,cosαi=cαi,sinαi=sαi,θi為關節變量,di,ai,αi為常量。

(3)
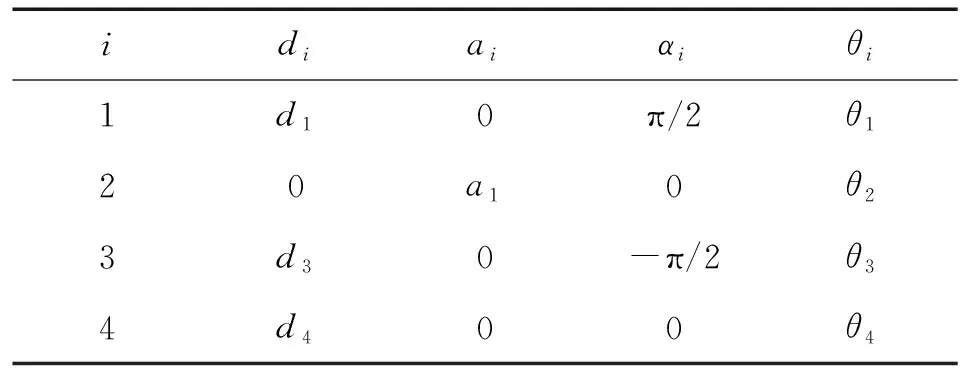
表2 D-H參數Table 1 D-H parameters
3.2 運動學逆解
(4)

(5)
(6)
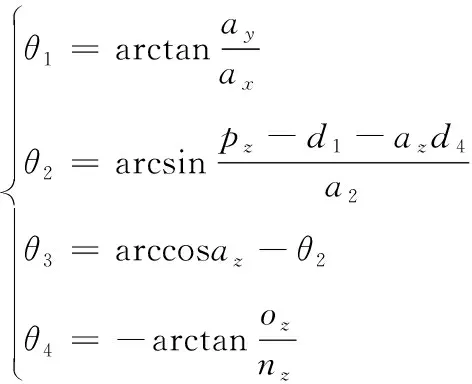
(7)
3.3 運動學驗證
通過康復外骨骼完成康復動作的場景,定義康復外骨骼的初始關節變量和目標狀態的關節變量,利用建立的D-H參數建立運動學模型,輸入關節變量角度值即可得到模型姿態位置(圖6),反之,有對應的姿態位置,也可得到4個關節角度值,驗證了所建立模型的正確性。
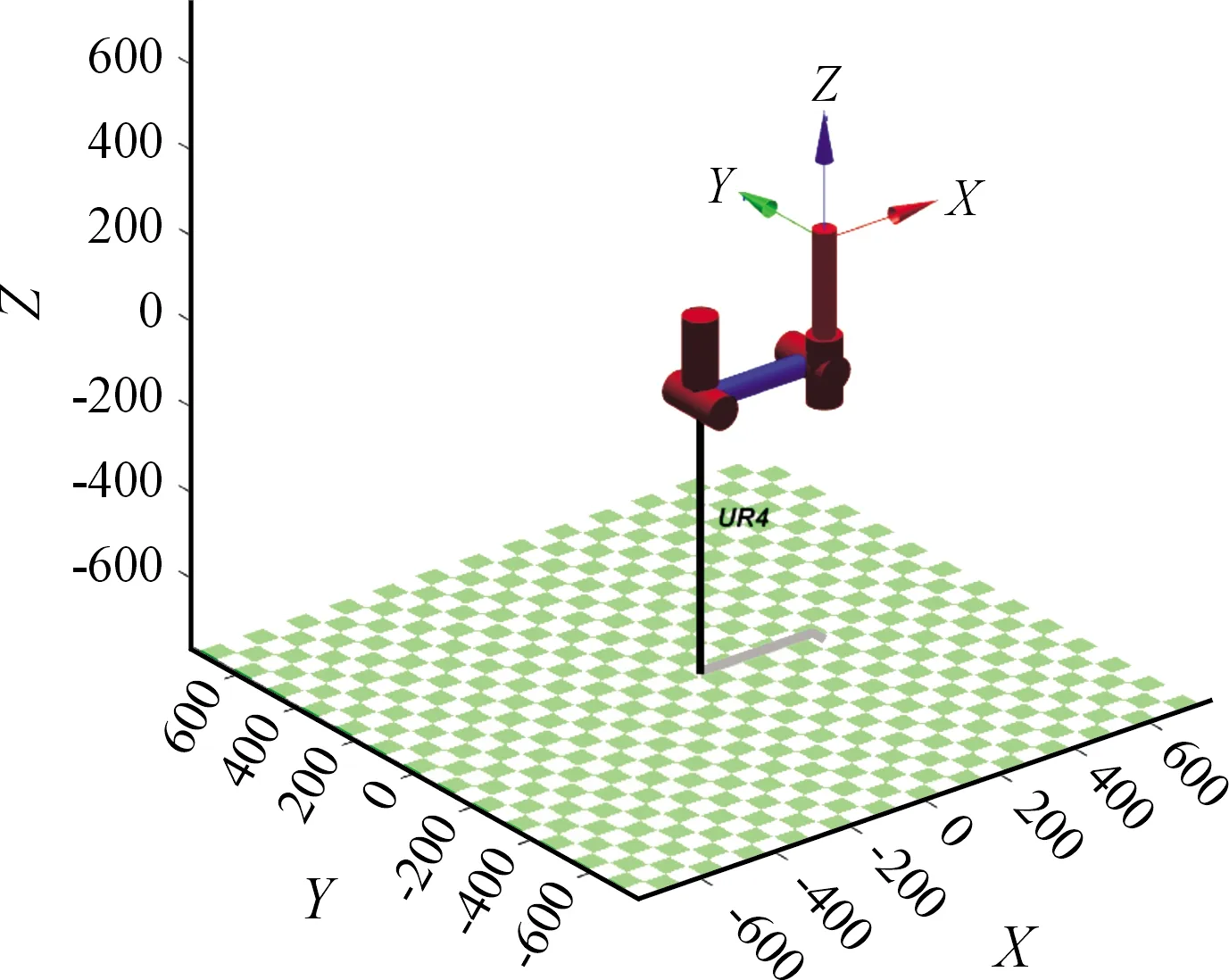
圖6 外骨骼結構運動學簡化模型示意圖Fig.6 Simplified kinematics model of exoskeleton structure
3.4 運動空間分析
以圖6模型位置為模型初始位置,根據患者的患側訓練需求,確定每個關節角度參數的變化范圍(見表3)。基于蒙特卡洛法,利用隨機函數生成各個關節變量變化范圍的N(取N=1 000)個隨機點,并把以上生成的所有關節變量隨機值代入到所建立模型的位置向量中,得到設計結構的工作范圍空間(見圖7),確定了康復機械臂末端能達到的點的集合,為后續生活動作(如:拿杯子,摸耳等動作)的軌跡規劃提供設計依據[5-6]。
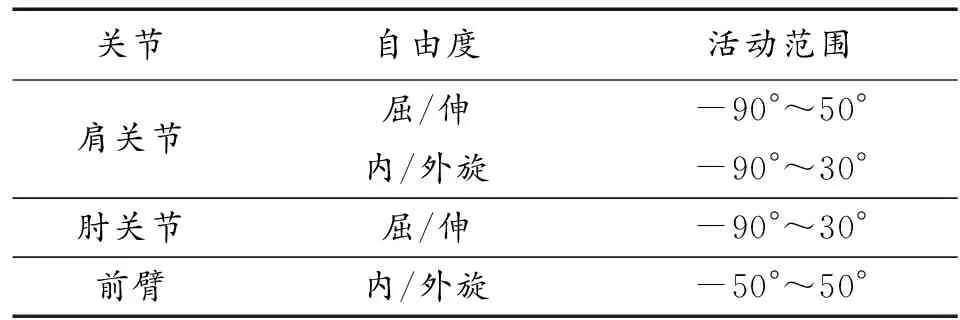
表3 各關節自由度運動范圍Table 3 Motion range of each joint degree of freedom
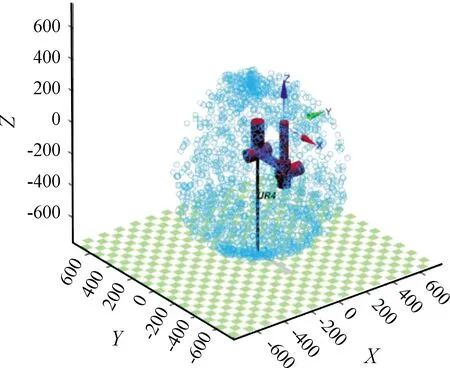
圖7 康復機械結構示意圖Fig.7 Working space diagram of rehabilitation mechanical structure
4 動力學分析
對所設計結構采用Kane方程法進行動力學分析。凱恩方程法適用于完整、非完整系統、開鏈及局部閉鏈系統等,其采用廣義速度為獨立變量,引入了偏速度、偏角速度、廣義主動力、廣義慣性力等概念,兼有矢量力學和分析力學的優點,若計算n=6(自由度)的同一種機器人,由表4可見Kane方程法在計算量和效率上的優勢。但缺點表現在偏速度概念的物理意義含糊,建立起的動力學方程也不直觀,偏速度的求解十分依賴每一個具體系統。綜合來看,Kane方程法在動力學建模方面仍具有較大優勢[7-8]。
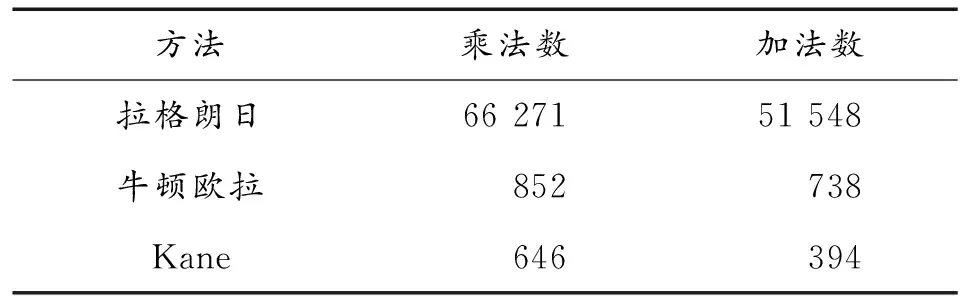
表4 動力學建模方法運算量Table 4 Comparison of computational complexity of dynamic modeling methods
由于設計的是開鏈康復外骨骼機器臂,各關節自由度均為獨立變量,故4個廣義坐標即為每個自由度的旋轉角度值,依次為qj=θj(j=1,2,3,4),由圖8可以看出,凱恩方程可描述為作用在系統上對應每個廣義速度的廣義主動力和廣義慣性力的代數和為0,即,

圖8 開鏈操作手凱恩方程法參數示意圖Fig.8 parameter diagram of Kane equation method for open chain operator

(8)
預設重力加速度g,則基座運動的角速度、角加速度、線速度、線加速度為:


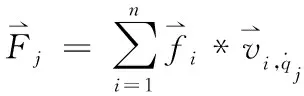
質心i點對廣義速度的偏速度為:

由于各個桿件均以轉動副連接,則各桿件上速度、加速度遞推算法如下:
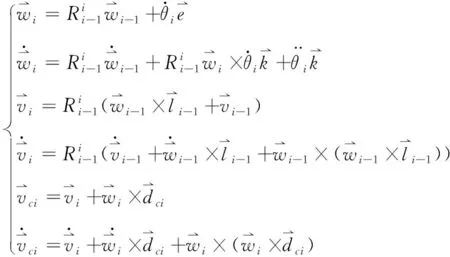
(9)
各桿件上的偏速度、偏角速度的遞推公式為:
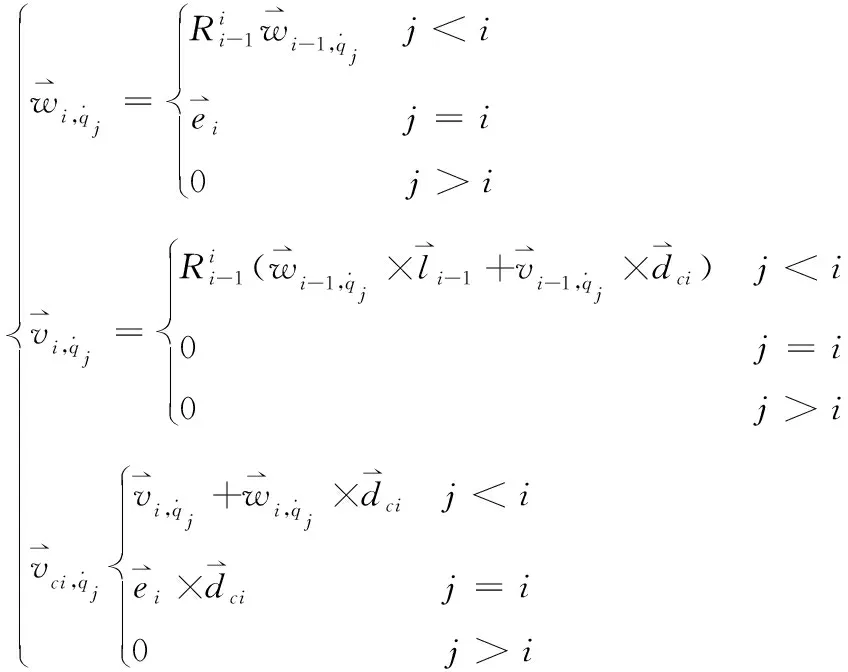
(10)

(11)

(12)
其中,
(13)
mi為桿件i的質量,集中于質心Ci;Ii為桿件i相對于質心Ci的慣性張量。

根據外骨骼機器人協助病人完成活動手臂康復動作的實際場景,控制目標是4個關節按照運動期望角度軌跡(見圖9)運動,則可計算出動力學模型每個關節的理論力矩和Adams虛擬樣機模型(見圖10)下各關節的仿真力矩(見圖11),得到關節力矩曲線(見圖12)。分析曲線結果,雖然仿真結果力矩曲線與實際計算的曲線結果有一定差異,但是在峰值與變化趨勢上仍具有相似性,證明了動力學建模的正確性。根據力矩計算結果,選用相應關節的電機,該設計均采用國產脈塔智能電機。前臂內外旋關節使用RMD-L7015-23T型號電機,額定轉矩為1 N·m,其余3個自由度使用RMD-X6-S2型號電機,額定轉矩為18 N·m,所選電機具有CAN通信協議,驅動器與電機、減速器一體化,能滿足控制與力矩需求。

圖9 各關節位置輸入曲線Fig.9 Input curve of each joint position

圖10 Adams虛擬樣機模型示意圖Fig.10 Simplified model of virtual prototype
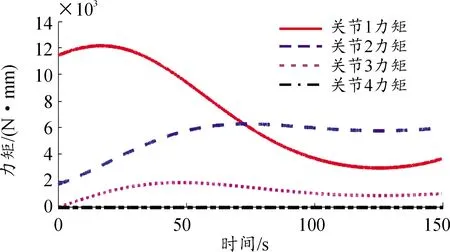
圖11 動力學模型各關節理論力矩曲線Fig.11 Theoretical torque curve of each joint of dynamic model

圖12 Adams各關節仿真力矩曲線Fig.12 Simulation torque curve of Adams joints
5 控制器設計
對于同一個機器人,無論采用何種建模方法,機器人開鏈系統的動力學方程的一般形式可表示為:

通過建立運動、動力學模型能夠基于末端點確定每個關節電機需要轉動到的角度及控制輸入的力矩等參數,而實際運動中,會由于外界干擾及電機本身的影響存在不確定性,使得關節電機轉動的理想角度與實際角度間存在偏差,因此,針對各電機,設計應用一種具有模糊自適應補償的控制器,來減小偏差值,提高跟蹤精度。
5.1 電機系統模型建立
所設計結構均采用無刷直流電機,其慣性載荷的運動動力學一般方程可由式(14)給出:
(14)
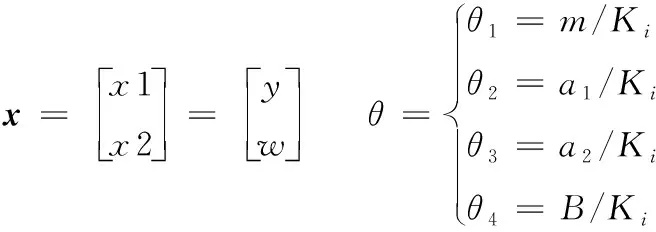
式中:m和y分別表示轉動慣量和角位移;Ki是相對于輸入電壓單位的轉矩常數;u為控制輸入;B表示模型阻尼的組合系數。
考慮到電機運轉過程中的連續摩擦及外界環境中的不確定性干擾,電機運轉過程中的連續摩擦可由式(15)給出,建模不確定性及參數偏差效應可由式(16)給出,基于式(14)和式(15),建立簡化的參數模型(式(18)),式(17)為系統狀態變量的設置和電機物理參數常數的標定值,由此,得到電機的系統模型(式(19)),聯立可建立電機仿真模型
(15)
式中:a1和a2代表不同的摩擦水平;c1、c2和c3表示各種形狀系數,以近似各種摩擦效應。
d(x,t)=-f(x,t)/Ki
(16)
(17)

(18)

(19)
5.2 模糊自適應符號積分魯棒控制器設計
z1=x1-x1d表示輸出跟蹤誤差,其中K1、K2、Kr是正反饋增益,通過模糊控制器,建立通用的模糊規則表,采用輸出跟蹤誤差和其變化率作為輸入,調節作為輸出參數的K1、K2、Kr的值。ua作為前饋控制律,用于消除非線性摩擦效應并實現改進的模型補償;us作為魯棒控制律,其中us1用于穩定運動系統標稱模型的線性魯棒反饋律,us2用于衰減模型不確定性影響的非線性魯棒項[9]。
(20)
由式(20)建立符號積分魯棒控制器系統模型,進而得到基于模糊自適應的符號積分魯棒控制器的電機系統整體仿真模型(見圖13)。
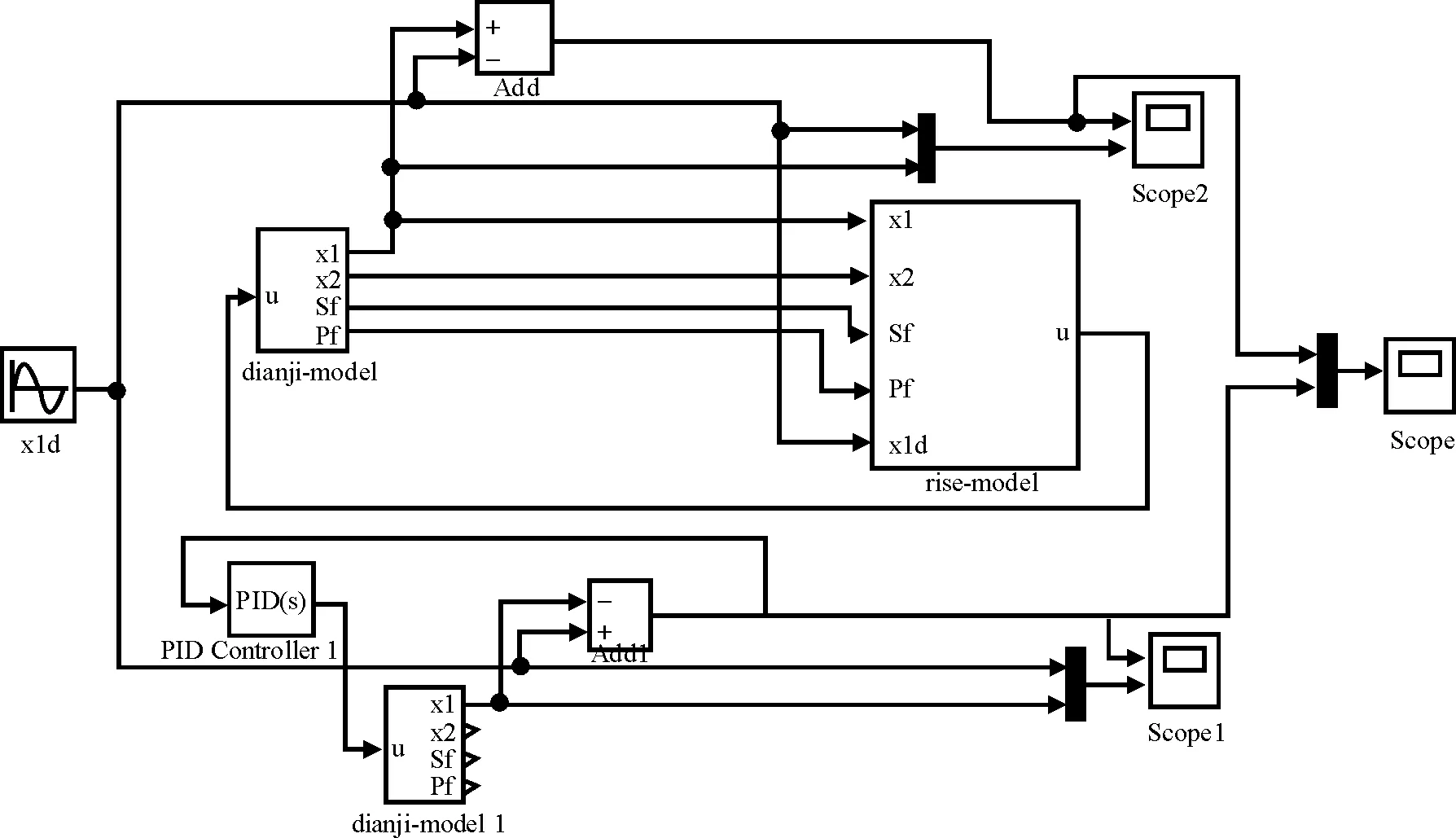
圖13 系統整體仿真模型示意圖Fig.13 Overall system simulation model
將期望角度值曲線函數輸入系統中,得到仿真軌跡的曲線及理想與實際角度的偏差曲線,與普通PID控制器控制效果比較:PID控制在偏差達到10-3級別,再提高P增益,修改I、D參數,容易出現失穩狀況,相較而言,所設計應用的符號積分魯棒控制器,更容易得到較好的增益參數(圖14),來達到更好的軌跡跟蹤控制效果,減小控制偏差。

圖14 符號積分魯棒控制器與PID控制器增益參數曲線Fig.14 Control effect diagram of symbolic integral robust controller and PID controller
6 結論
1)設計了滿足康復系統要求的上肢康復外骨骼結構。基于D-H法,對設計模型進行了正逆運動學分析,得到了其運動范圍空間;基于凱恩方程法進行了動力學分析,并通過Adams仿真驗證了該方法的正確性與可行性,并根據所得到的各關節理論計算力矩進行電機選型。
2) 考慮電機模型的連續摩擦與實際場景中不確定性的干擾,進行了控制器的應用設計與仿真,用模糊方法取得了更好的控制參數,減小了跟蹤誤差,驗證了模型的先進性與可行性,為控制器的參數選擇提供了科學依據,對實現更高精度的控制具有重要意義。
3) 所做工作滿足了搭建整體系統的前期需求,為模擬設計的完整上肢智能康復系統進行了理論準備,對其他串聯機械臂的研究具有參考價值。
4) 結構外形曲線和長度調節機構仍可改進,后續傳感器及走線在實際測試后,可以進行更加科學合理規劃;動力學方法雖計算效率較高,但引入的一些變量實際物理意義模糊;控制器在實際應用中仍需要進一步測試以獲得優異的參數值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
特別健康(2018年2期)2018-06-29 06:13:44
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學精密工程(2016年6期)2016-11-07 09:07:19
現代企業(2015年9期)2015-02-28 18:56:50
中國衛生(2014年6期)2014-11-10 02:30:50
