自行火炮身管指向測量關(guān)鍵技術(shù)綜述
2022-07-10 10:00:50程澤俊滕紅智韓蘭懿石志勇
兵器裝備工程學(xué)報(bào) 2022年6期
程澤俊,滕紅智,韓蘭懿,石志勇
(1.陸軍工程大學(xué)石家莊校區(qū) 車輛工程教研室,河北 石家莊 050001;2.中國人民解放軍32180部隊(duì),北京 100072)
1 引言
現(xiàn)代戰(zhàn)爭對武器系統(tǒng)的自主作戰(zhàn)能力和精確打擊能力提出了更高的要求。為適應(yīng)現(xiàn)代戰(zhàn)爭的需求,自行火炮都配置了具有定位定向裝置的火控系統(tǒng),確保自行火炮可以自主定位定向,并根據(jù)目標(biāo)位置將火炮調(diào)整到相應(yīng)的指向,發(fā)射炮彈完成對目標(biāo)的打擊。因此,身管指向精度是火控系統(tǒng)的重要性能指標(biāo)。同時(shí),身管指向測量也是自行火炮調(diào)炮精度檢測、零位零線調(diào)整、射角不一致量檢測、瞄準(zhǔn)線偏移量檢測和自行火炮定位定向系統(tǒng)尋北精度檢測的基礎(chǔ)。
為準(zhǔn)確測量自行火炮身管指向精度,許多學(xué)者進(jìn)行了深入的研究,基于不同的原理,提出了多種方法,如精密光學(xué)系統(tǒng)測量;陀螺測量;經(jīng)緯儀測量;全站儀測量;GPS測量;視覺測量等。根據(jù)測量方法的不同,上述方法可以分為相對測量法和絕對測量法。絕對測量法,主要測量相對于地理北向的方位角和相對于水平面的高低角,如陀螺測量法和GPS測量法。相對測量法測量的高低角與絕對測量法一樣,但方位角不是相對于地理北向,而是相對于某一參考方向,比如雙經(jīng)緯測量法中參考方向?yàn)?臺經(jīng)緯儀的連線方向。
身管指向?qū)嶋H上是身管軸線的指向,因此身管軸向測量必須首先確定身管軸線,在此基礎(chǔ)上采用一定的技術(shù)確定軸線的指向。對于基于測角原理確定軸線指向的方法,還必須進(jìn)行布站優(yōu)化,以提高測量精度。本文分別對身管軸線確定技術(shù)、軸線指向確定技術(shù)和布站優(yōu)化技術(shù)研究現(xiàn)狀進(jìn)行了分析,并展望了自行火炮身管指向測量技術(shù)未來發(fā)展趨勢。
2 自行火炮身管軸線確定技術(shù)
身管軸線確定是身管指向測量的基礎(chǔ)。基于不同測量原理,身管軸線確定方法不同。分析現(xiàn)有測量方法,身管軸線確定方法可以分為標(biāo)線解析法和軸線模擬法。
2.1 標(biāo)線解析法
所謂標(biāo)線解析法,就是在身管外表面設(shè)置若干標(biāo)記點(diǎn)(通常選取2~7個(gè)),通過建立合適的模型,確定身管實(shí)際軸線與身管外標(biāo)記點(diǎn)間連線(即標(biāo)線)的關(guān)系,在實(shí)際測量中,通過測量標(biāo)線的指向,經(jīng)過修正得到軸線的指向,以達(dá)到確定身管實(shí)際軸線的目的。
馮仲科等將火炮身管等效成圓臺模型,認(rèn)為2個(gè)標(biāo)記點(diǎn)的連線與身管軸線位于同一平面,通過測量標(biāo)記點(diǎn)身管的半徑,確定標(biāo)線與軸線之間的夾角。謝杰濤等在身管上設(shè)置3個(gè)標(biāo)記點(diǎn),2個(gè)標(biāo)記點(diǎn)靠近身管尾部,一個(gè)靠近炮口,尾部兩個(gè)標(biāo)記點(diǎn)分別與炮口標(biāo)記點(diǎn)形成兩條標(biāo)線,基于身管在任意角度下兩條標(biāo)線與身管軸線的夾角余弦不變,可以實(shí)現(xiàn)一次標(biāo)定實(shí)現(xiàn)多次測量。
解析法中關(guān)于標(biāo)記點(diǎn)個(gè)數(shù)的選取,總的趨勢是點(diǎn)數(shù)越多,測量精度越高。但考慮到增加標(biāo)記點(diǎn)數(shù)量,同時(shí)也會增加測量的工作量。故綜合考慮減少測量工作量和提高測量精度這兩個(gè)因素,應(yīng)選取5個(gè)標(biāo)記點(diǎn)為宜。
2.2 軸線模擬法
軸線模擬法通過尋找身管實(shí)際軸線的平行線或?qū)嶋H軸線延伸線,利用找到的平行線或軸線延伸線模擬身管實(shí)際軸線。因此該方法分為平行線法和延長線法。
延長線法通常應(yīng)用于需要在火炮身管上安裝測試設(shè)備的身管軸線指向確定方案中。在精密光學(xué)系統(tǒng)測量身管指向方案中,保證測試設(shè)備緊密安裝于自行火炮身管上,設(shè)備指向與身管指向嚴(yán)格統(tǒng)一,可認(rèn)為測試設(shè)備軸線與身管軸線平行,以測試設(shè)備軸線模擬實(shí)際身管軸線。其中激光器+PSD靶的測量方法、CCD+點(diǎn)光源的測量方法中利用激光器(點(diǎn)光源)發(fā)射的激光(可見光)模擬身管軸線,CCD相機(jī)+特制靶方法中通過相機(jī)視軸模擬身軸線;陀螺測量方案中,將陀螺傳感器安裝于炮口,調(diào)整陀螺敏感軸與實(shí)際身管軸線平行以達(dá)到模擬身管實(shí)際軸線的目的;“瞄準(zhǔn)點(diǎn)法”中通過調(diào)整炮口與炮尾設(shè)置的靶盤中心直至瞄準(zhǔn)點(diǎn)、炮口靶心、炮尾靶心三點(diǎn)共線,可認(rèn)為兩靶盤中心連線與身管實(shí)際軸線平行,以達(dá)到模擬實(shí)際軸線的效果;
延長線法通常應(yīng)用于外置測試設(shè)備(如經(jīng)緯儀、全站儀)的身管軸線指向確定方案中。汪偉等設(shè)計(jì)了引出虛擬軸線的機(jī)械定位裝置,將軸線定位架緊密固定于炮口內(nèi)側(cè),利用與定位架同軸的裝置延伸段模擬實(shí)際身管軸線。各軸線確定方案特點(diǎn)總結(jié)如表1所示。

表1 軸線確定方案特點(diǎn)
3 軸線指向確定技術(shù)
身管指向測量就是采用一定的技術(shù)手段確定身管軸線在空間中的位置。目前常用方法包括:精密光學(xué)系統(tǒng)測量;陀螺測量;經(jīng)緯儀測量;全站儀測量;GPS測量;視覺測量等方法。
3.1 精密光學(xué)系統(tǒng)測量
精密光學(xué)系統(tǒng)測量方案的核心為光敏元件,利用其感光特性完成軸線指向確定。其方案主要分為兩類:一類通過系統(tǒng)中光敏元件的感光特性制成特殊靶板,通過靶板上光點(diǎn)的位置變化反應(yīng)軸線指向;另一類則通過光敏元件制成的相機(jī)拍攝的靶位圖像變化確定軸線指向。測量原理如圖1所示:通過緊密安裝于地面火炮身管上的脈沖激光器發(fā)射激光照射靶板,隨后激光通過透鏡后照射到光敏元件上,使光敏元件有信號輸出,從而獲得初始的參考指向。隨后調(diào)整身管至測量姿態(tài),重復(fù)上述操作,即可獲得基于參考指向的相對指向以完成測量。方案中光敏元件主要采用:位置探測器(position sensitive detector,PSD)、電荷耦合器件(charge-coupled device,CCD)。

圖1 精密光學(xué)系統(tǒng)測量原理示意圖
赫赤等提出了基于PSD和CCD元件的多種精密光學(xué)系統(tǒng)測量方法,王春燕等提出了一種基于CCD成像技術(shù)的多光軸光學(xué)系統(tǒng),可達(dá)到0.1 mil的測量精度。孫昊等研究了一種基于CCD的火控性能參數(shù)靜態(tài)測試系統(tǒng),靜態(tài)測量精度約0.2 mil。
采用PSD及CCD的精密光學(xué)系統(tǒng)測量方案優(yōu)點(diǎn)在于系統(tǒng)響應(yīng)快、分辨率高、消除了人眼觀察的隨機(jī)誤差、減小了測量過程的系統(tǒng)誤差,測量過程較為省時(shí)。但受靶板尺寸的限制較大,測量范圍很小。此外采用PSD的測量方法易受環(huán)境光干擾,成像系統(tǒng)邊緣存在畸變,在圖像邊緣處的測量誤差較大。CCD相機(jī)+特制靶的方法中,在測量前要進(jìn)行特制靶的網(wǎng)格繪制,較為繁瑣。而王春燕等設(shè)計(jì)的多光軸成像系統(tǒng)雖能達(dá)到0.1 mil的測量精度,但對測試設(shè)備的光軸一致性要求較高,且進(jìn)行動態(tài)測量過程中信號系統(tǒng)受噪聲影響較大。
3.2 陀螺測量
基于陀螺的測量方案則是根據(jù)陀螺自身的測角能力確定身管軸線指向,將陀螺傳感器安裝于炮口,調(diào)整陀螺儀敏感軸與身管軸線平行后,通過陀螺儀顯示的角度變化即可確定軸線指向。王春忠等設(shè)計(jì)了一臺采用高精度電調(diào)諧兩軸角速度陀螺儀的炮控精度儀,嚴(yán)德斌則以3個(gè)互相垂直安裝的激光陀螺和3個(gè)加速度計(jì)為測量系統(tǒng)主體設(shè)計(jì)了一套火炮身管指向系統(tǒng)。
利用陀螺進(jìn)行測量的方法忽略了調(diào)炮過程中方位角與俯仰角之間的耦合效應(yīng),與實(shí)際情況不符,且無法保證 0.2 mil的測量精度要求。針對耦合效應(yīng),韓崇偉等設(shè)計(jì)了采用四元數(shù)的伺服控制系統(tǒng)來解決。
3.3 經(jīng)緯儀測量
雙經(jīng)緯儀法測量是利用經(jīng)緯儀解算標(biāo)記點(diǎn)連線空間指向,根據(jù)數(shù)學(xué)模型中確定的標(biāo)線與實(shí)際身管軸線的關(guān)系,確定軸線指向。其測量原理如圖2所示:通過設(shè)置在火炮身管一側(cè)的2臺經(jīng)緯儀分別觀測設(shè)置于炮口和炮尾的標(biāo)記點(diǎn),測得身管炮口、炮尾標(biāo)記點(diǎn)相對于經(jīng)緯儀連線的高低角、方向角。通過獲得的高低角、方向角解算出標(biāo)記點(diǎn)的空間坐標(biāo),再利用空間坐標(biāo)解算出身管指向。
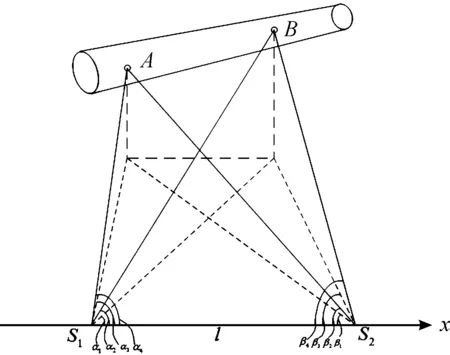
圖2 雙經(jīng)緯儀測量原理示意圖
2001年由陶化成等首先提出了以2臺高精度數(shù)字經(jīng)緯儀為基礎(chǔ)的壓制兵器身管指向測試系統(tǒng)方案,此方法在后期經(jīng)不斷完善后成為對火炮身管指向進(jìn)行靜態(tài)測量的主流方法。Wu D等提出了一種采用經(jīng)緯儀的大尺寸結(jié)構(gòu)件指向測量方法,具有一定的參考意義。作為目前主流的測量方案,其適應(yīng)能力強(qiáng)、成本低、測量精度高, 2001年由陶化成等設(shè)計(jì)的壓制兵器身管指向測試系統(tǒng),靜態(tài)測量精度可達(dá)到0.3 mil,現(xiàn)已低于0.2 mil。Wu D等提出的方法精度甚至達(dá)到0.05 mil。但此類方法不能進(jìn)行動態(tài)測量,解算過程較為復(fù)雜,雖然靜態(tài)測量精度高,但測量系統(tǒng)仍存在許多影響因素,主要包括:經(jīng)緯儀本身測角誤差、經(jīng)緯儀互瞄對準(zhǔn)誤差引起的測角誤差、操作手觀測瞄引起的測角誤差、經(jīng)緯儀調(diào)平誤差引起的測角誤差。
3.4 全站儀測量
全站儀測量原理與采用雙經(jīng)緯儀原理大致相同,區(qū)別在于相較于經(jīng)緯儀全站儀具備測距功能,解算坐標(biāo)時(shí)可直接得到全站儀與標(biāo)記點(diǎn)間的斜距及相應(yīng)角度,測量原理如圖3所示:通過設(shè)置在火炮身管一側(cè)的全站儀分別觀測設(shè)置于炮口和炮尾的標(biāo)記點(diǎn),測得身管炮口、炮尾標(biāo)記點(diǎn)相對于全站儀基線的高低角、方向角、斜距。通過獲得的高低角、方向角、斜距解算出標(biāo)記點(diǎn)的空間坐標(biāo),再利用空間坐標(biāo)解算出身管指向。由于全站儀相較于經(jīng)緯儀功能更為豐富,使得指向解算過程更為省時(shí),解算更為省時(shí),測量效率提高50%。
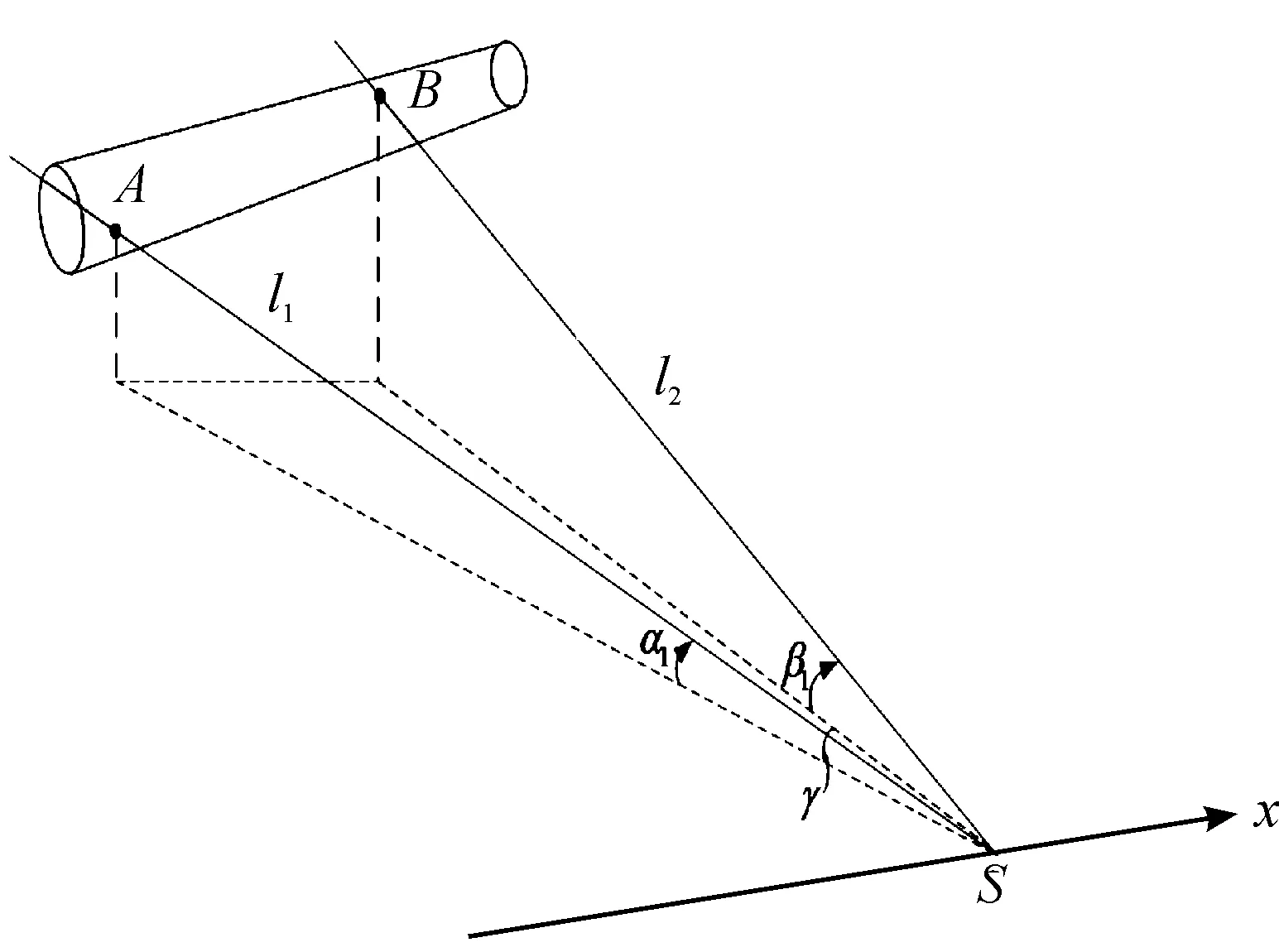
圖3 單全站儀原理示意圖
張光等提出了一種基于全站儀的火炮零線檢校方法,曾刊等設(shè)計(jì)了基于全站儀的調(diào)炮精度測量系統(tǒng)。Jincheng Liu等分析了全站儀測量的誤差及原因。雖然全站儀測量效率更高,但全站儀測量同樣只能進(jìn)行靜態(tài)測量,且誤差來源同樣較多,主要包括:全站儀本身系統(tǒng)誤差、觀瞄引起的測角(測距)誤差、全站儀調(diào)平引起的誤差等。
3.5 GPS測量
GPS測量法通過在炮尾和炮口設(shè)置GPS天線并解算模擬軸線上兩點(diǎn)坐標(biāo),得到模擬軸線指向。王靜等驗(yàn)證了使用GPS測量身管指向的可行性。此方法能進(jìn)行靜態(tài)和動態(tài)測量,有一定的可行性,但是測量精度難以保證(基線長8 m時(shí),動態(tài)測量精度小于0.6 mil,靜態(tài)測量20 s精度小于0.12 mil),同時(shí)GPS易受測試場地天氣、磁場等因素影響,使用條件較為苛刻。
3.6 視覺測量
與精密系統(tǒng)測量原理類似,視覺測量通過特征點(diǎn)變化檢測模擬軸線指向。區(qū)別在于視覺測量的成像系統(tǒng)并非安裝于身管上,而是與經(jīng)緯儀、全站儀測量方案類似,設(shè)置于自行火炮身管側(cè)向,而帶有特征點(diǎn)靶板則固定于身管上。
其中朱耀軒等提出了一種結(jié)合擴(kuò)展卡爾曼濾波算法、多點(diǎn)透視問題解的單目視覺測量技術(shù),完成了火炮身管指向進(jìn)行靜態(tài)測量;全厚德等進(jìn)行了雙目立體視覺下的三重交會測量算法解算火炮身管指向的研究;宋慶華等研究了一種基于攝像機(jī)和高精度尋北儀的圖像處理技術(shù);齊寰宇等提出了一種自適應(yīng)閾值的特征點(diǎn)處理算法;Xiaoli H等研究了物面連續(xù)離散化后匹配像點(diǎn)的方法。
視覺測量方法既可進(jìn)行靜態(tài)測量也可以進(jìn)行動態(tài)測量,同時(shí)響應(yīng)速度快。但在正式測量前需要進(jìn)行標(biāo)定和求參,且該方法存在鏡頭畸變。目前已有的視覺測量方法中,朱耀軒等提出的單目視覺測量技術(shù)測得的高低角精度1 mil,方位角精度5 mil,測量精度明顯低于基于雙經(jīng)緯儀和全站儀的測量方法,同時(shí)也存在方位角測量結(jié)果誤差明顯大于高低角的問題。全厚德等提出的方法高低角平均測量誤差為1.133 3°(約18.89 mil),方位角平均測量誤差為0.755 3°(約12.59 mil),精度過低。宋慶華等提出的方法相對誤差精度約1.6 mil,相較于全厚德、朱耀軒提出的視覺測量方法精度更高,但也遠(yuǎn)低于基于雙經(jīng)緯儀和全站儀的測量方法。齊寰宇等提出的算法在動態(tài)測量下高低角精度低于1.5 mil,但方位角精度達(dá)3 mil,方位角誤差較大,考慮產(chǎn)生原因是相機(jī)對沿光軸信息獲取不敏感。Xiaoli H等提出的方法方向角均方根誤差為0.97°(約16.17 mil),高低角均方根誤差為0.90°(約15 mil)。可以看出,視覺測量方法仍具有發(fā)展空間,測量誤差和像點(diǎn)提取誤差有待解決,可嘗試通過改善硬件、優(yōu)化算法、多角度多相機(jī)布陣等方式以提高精度。各類測量方案特點(diǎn)如表2所示。
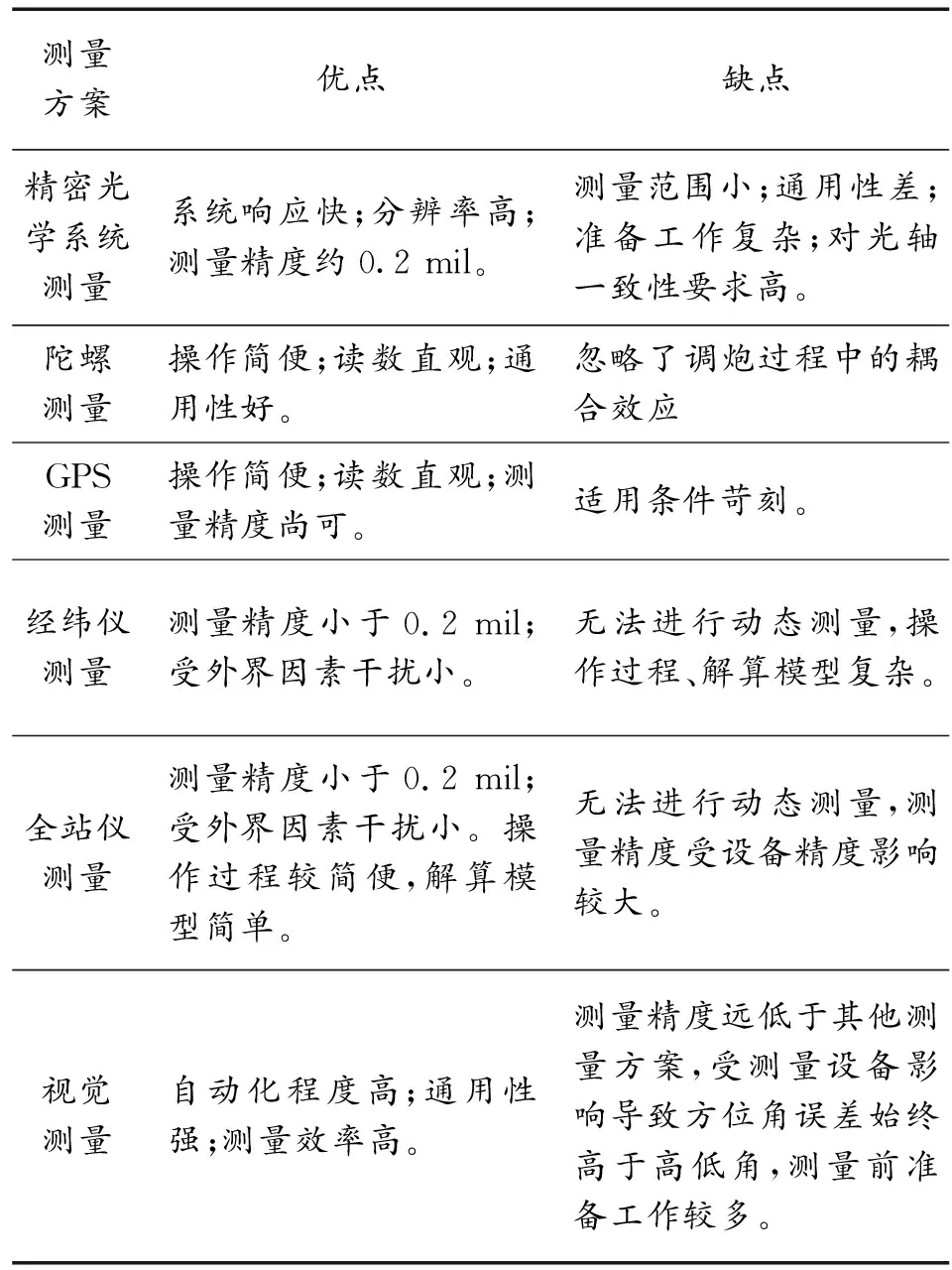
表2 各測量方案特點(diǎn)比較
4 布站方案優(yōu)化技術(shù)
在采用經(jīng)緯儀、全站儀確定軸線指向的過程中,設(shè)站點(diǎn)位的不同會造成測量誤差不同,為減小布站方案對測量的影響,需尋找一個(gè)對測量精度影響較小的設(shè)站點(diǎn)位。
4.1 技術(shù)實(shí)現(xiàn)原理
優(yōu)化技術(shù)是在身管狀態(tài)及標(biāo)記點(diǎn)位置關(guān)系保持不變的情況下,在給定的布站區(qū)域內(nèi)尋找設(shè)站最優(yōu)解。通過建立待優(yōu)化測量方案的布站數(shù)學(xué)模型,推導(dǎo)確定布站模型的不確定度函數(shù),并引入適當(dāng)?shù)膶?yōu)算法,最終得到給定區(qū)域內(nèi)最佳的設(shè)站點(diǎn)。目前研究人員常用的尋優(yōu)方案主要分為2種:遺傳算法和蒙特卡洛法。
4.2 遺傳算法(genetic algorithm,GA)
GA是一種基于仿生原理的尋優(yōu)算法,通過模擬的自然選擇、變異,實(shí)現(xiàn)種群向更高的適應(yīng)度進(jìn)化以達(dá)到全局最優(yōu)。簡單遺傳算法(simple genetic algorithm,SGA)的尋優(yōu)過程為:根據(jù)待解問題建立模型,其次進(jìn)行參數(shù)初始化設(shè)置、計(jì)算個(gè)體適應(yīng)度,并按設(shè)定的規(guī)則選擇進(jìn)入下一代的個(gè)體,按設(shè)定的概率概率進(jìn)行交叉、變異操作。若滿足終止條件,則輸出適應(yīng)度最優(yōu)的解;若不滿足,則重復(fù)上述操作直至滿足終止條件并輸出最優(yōu)解。
SGA具有適用性好、魯棒性強(qiáng)等優(yōu)點(diǎn),但其存在過早收斂、全局優(yōu)化速度慢、沒有較好的參數(shù)設(shè)置準(zhǔn)則等問題。為此,研究人員通過選擇合適的基本遺傳算子(選擇算子、交叉算子、變異算子)來解決算法存在的問題。除了通過選擇合適的遺傳算子外,研究人員還通過改進(jìn)適應(yīng)度函數(shù)、優(yōu)化初始種群個(gè)體、調(diào)整搜索區(qū)間等方式對SGA進(jìn)行優(yōu)化。Rana S等通過對初始個(gè)體進(jìn)行優(yōu)化以提高初始個(gè)體適應(yīng)度以提高算法的收斂速度。Yongfeng Fang等改進(jìn)了適應(yīng)度函數(shù)以達(dá)到快速收斂的目的。
董起順等認(rèn)為測量誤差可以通過尋找最優(yōu)布站方式得以控制,并提出了一種在經(jīng)緯儀基線長一定的前提下的局部尋優(yōu)方法。孫澤林等認(rèn)為應(yīng)先確定身管上標(biāo)記點(diǎn)的位置后再進(jìn)行經(jīng)緯儀布站,否則會出現(xiàn)根據(jù)最優(yōu)布站方式解算出的標(biāo)記點(diǎn)間距離超出身管長度的情況,張光等提出了一種基于SGA的雙經(jīng)緯儀布站尋優(yōu)方法,均實(shí)現(xiàn)了優(yōu)化布站并提高了指向精度。方案雖能一定程度上提高檢測測量精度,但由于初始個(gè)體的隨機(jī)性,每次運(yùn)行算法得到的結(jié)果均不相同。僅比較了優(yōu)化方案下和隨機(jī)情況的布站精度比較,沒有對優(yōu)化方案下的不同結(jié)果進(jìn)行量化比較,所求問題解是否是全局最優(yōu)解仍有待研究。
4.3 蒙特卡洛法(monte carlo method,MCM)
MCM又稱統(tǒng)計(jì)模擬方法,是一種以概率統(tǒng)計(jì)理論為指導(dǎo)的一類數(shù)值計(jì)算方法,抽取大量的隨機(jī)數(shù)作為樣本進(jìn)行試驗(yàn),通過得到的統(tǒng)計(jì)特征值推定問題解,其核心在于“隨機(jī)抽樣”與“統(tǒng)計(jì)實(shí)驗(yàn)”。MCM的一般實(shí)現(xiàn)過程為:根據(jù)待解問題的特點(diǎn)構(gòu)造模擬模型,通過處理大量數(shù)據(jù)得到精度較高的問題解。其優(yōu)勢在于:誤差與問題的維數(shù)無關(guān)。對于連續(xù)性的問題不必進(jìn)行離散化處理,可以直接解決具有統(tǒng)計(jì)性質(zhì)的問題。而缺陷則在于:存在概率誤差、計(jì)算步數(shù)較多導(dǎo)致計(jì)算時(shí)間較長,對于確定性問題需要轉(zhuǎn)化成隨機(jī)性問題后再進(jìn)行處理。
謝杰濤等提出了一種基于MCM的雙經(jīng)緯儀布站尋優(yōu)方法,不僅可以計(jì)算給定布站方案的測試精度,而且能給出滿足測試精度的布站方案。劉志鵬等研究了基于MCM的布站方案對指向精度的影響,建立身管指向測試方案的不確定度函數(shù),通過隨機(jī)抽樣代入函數(shù)求解得到該布站點(diǎn)下不確定度函數(shù)的值,分析比較可得出給定范圍下的最佳布站方式。
5 結(jié)論和展望
1) 建立并引入檢測區(qū)的北向基準(zhǔn)。現(xiàn)代戰(zhàn)爭對自行火炮的自主作戰(zhàn)能力和精確打擊能力提出了更高的要求,現(xiàn)有方案檢測的身管指向均為相對于自行火炮車身的相對指向,而實(shí)際情況下需要檢測身管在大地坐標(biāo)系下的絕對指向。為此,需研究如何建立北向基準(zhǔn)并在現(xiàn)有測量方案中引入北向基準(zhǔn),完成在大地坐標(biāo)系下絕對指向的測量。考慮采用精密單點(diǎn)定位技術(shù)或?qū)崟r(shí)動態(tài)差分技術(shù),獲取火炮附近兩點(diǎn)位于WGS-84坐標(biāo)系下的坐標(biāo)。通過獲取的坐標(biāo)可得到已知點(diǎn)位連線與絕對北向的夾角,隨后解算檢測設(shè)備與這兩點(diǎn)的位置關(guān)系,可得到檢測設(shè)備處的北向基準(zhǔn)。
2) 簡化軸線確定過程的操作流程。分析現(xiàn)有軸線確定技術(shù)中,由于無需在身管上加裝測試設(shè)備,標(biāo)線解析法優(yōu)于軸線模擬法,但是標(biāo)線解析法存在選點(diǎn)過少精度較低、選點(diǎn)過多存在冗余的問題。為了保證精度的同時(shí)減少冗余,可參考導(dǎo)航領(lǐng)域中描述位姿的方法:歐拉角、旋轉(zhuǎn)矩陣、四元數(shù)。以旋轉(zhuǎn)矩陣為例,相對指向測量,選點(diǎn)建立火炮車身坐標(biāo)系、炮口坐標(biāo)系,推導(dǎo)自行火炮車身與身管間的旋轉(zhuǎn)關(guān)系,解算坐標(biāo)系間的旋轉(zhuǎn)矩陣后可得到身管的相對指向。若進(jìn)行絕對指向測量,則需建立檢測設(shè)備的坐標(biāo)系作為基準(zhǔn)坐標(biāo)系,并推導(dǎo)基準(zhǔn)坐標(biāo)系與車身坐標(biāo)系的旋轉(zhuǎn)矩陣。理論上在此方案中火炮身管上僅需選取兩標(biāo)記點(diǎn),且無需保證標(biāo)線與軸線嚴(yán)格平行,相對于軸線模擬法中的兩點(diǎn)選取要求更低,誤差更小。同時(shí),在選擇的標(biāo)記點(diǎn)不變的情況下,一次標(biāo)定即可實(shí)現(xiàn)重復(fù)測量。
3) 提升動態(tài)測量精度。現(xiàn)有測量方法難以同時(shí)滿足靜態(tài)及動態(tài)的高精度測量,而靜態(tài)測量耗時(shí)較長,未來發(fā)展方向更偏向于動態(tài)測量。視覺測量作為新興技術(shù),適用范圍較廣,雖動態(tài)測量精度低(高低角精度1.5 mil,方位角精度3 mil),但存在較大的發(fā)展空間。可考慮進(jìn)行多角度布站,在炮口處設(shè)置若干標(biāo)記點(diǎn)后,在身管在炮口正對方向、身管一側(cè)、火炮正上方(開闊場地考慮使用無人機(jī))分別設(shè)置相機(jī)進(jìn)行視覺測量。可解決視覺測量中棋盤格靶板繪制難度較高、相機(jī)對沿光軸信息獲取不敏感、像點(diǎn)提取存在誤差的問題,同時(shí)有待對它進(jìn)行深入研究使其充分發(fā)揮其潛在優(yōu)勢。
4) 改進(jìn)優(yōu)化布站方案。目前已有人研究布站方式對測量精度的影響,但采用的尋優(yōu)方法僅停留在SGA、MCM上。近些年隨著計(jì)算機(jī)科學(xué)的持續(xù)發(fā)展,產(chǎn)生了多種尋優(yōu)方法,包括:與SGA類似的模擬退火法、免疫算法,受社會昆蟲(如螞蟻、蜜蜂)和群居脊椎動物(如鳥群、魚群)啟發(fā)而產(chǎn)生的以蟻群算法、粒子群算法為代表的群智能算法,神經(jīng)網(wǎng)絡(luò)算法、隨機(jī)森林抽樣等。這些算法較為成熟完善,在許多尋優(yōu)問題上均表現(xiàn)性能良好,將這些算法應(yīng)用到布站尋優(yōu)上將能得到令人滿意的結(jié)果。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(shè)(2019年3期)2019-10-10 01:40:18
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(zhì)(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08
