一種可在高空投放的低成本小型無人機技術研究
2022-07-10 09:51:40周前進胡學峰葉波波王子一
兵器裝備工程學報 2022年6期
關鍵詞:設計
周前進,胡學峰,胡 浩,葉波波,王子一
(1.安徽長城軍工裝備技術研究院有限公司, 合肥 230002; 2.北京理工大學, 北京 100081)
1 引言
在現代復雜高威脅的信息戰環境中,隨著地面防空雷達探測距離不斷增加,探測能力不斷增強,已經具備多目標探測能力,對空軍各類戰機的生存力造成很大的威脅。近年來,隨著小型無人機的快速發展,其在軍事領域的應用越來越廣泛,載機在高空將低成本無人機進行大規模投放,蜂群無人機之間通過簡單的導航控制,對敵防空區域的雷達進行抵近式干擾、誘騙,使防空雷達的探測能力趨于飽和,為空軍飛機和機載武器提供掩護,可大幅度提升載機平臺的生存力和突防能力。
2015年9月,美國國防高級研究項目局(DARPA)發布了“小精靈”項目,開發具備組網與協同功能的可回收小型無人機系統。這種小型無人機可攜帶模塊化偵察或干擾載荷,由大型運輸機或轟炸機運送至防區外投放。集群無人機通過三角定位、時頻差等無源精確定位與瞄準技術探知目標,通過切斷敵方通信甚至向敵數據網絡中注入惡意代碼實施電子和網絡攻擊。美國海軍研究辦公室ONR于2015年公布了“低成本無人機蜂群”(LOCUST)項目,發展在特定區域一起執行掩護、巡邏和攻擊地面目標任務的蜂群無人機,并選擇使用雷神公司的“郊狼”小型無人機進行試驗。同時,美國國防部戰略能力辦公室聯合美國空軍也開展類似的“山鶉”項目,如圖1所示。

圖1 從高空投放的小型無人機Fig.1 Small UAV dropped from high altitude
隨著人工智能、微機電、衛星通信、5G等技術的發展,具有抗毀性強、成本低、作戰費效比高等優勢的無人機集群,可實施廣域分布式多點多向突擊,攜帶不同任務載荷完成不同作戰任務。本文分析設計了一款可在高空投放的低成本無人機,通過試驗對該無人機關鍵技術進行了驗證,為該無人機下一步設計、試驗工作奠定了基礎。
2 無人機總體方案設計
2.1 氣動方案設計
無人機需通過大型運輸機或各類戰機進行運輸、投放,為了便于裝載無人機,一般采用發射管進行貯存、運輸。紀秀玲等根據巡飛彈折疊翼的低雷諾數、高升力翼型的氣動特性,先后提出了設計方法,進行了氣動外形和彈翼的折疊設計。袁新波等在迫擊炮平臺完成了折疊翼無人機的設計和驗證。根據空投型無人機的飛行特性,采用大展弦比串列式氣動布局,在滿足攜帶足夠載荷能力前提下,保證無人機起飛質量小、折疊后尺寸小,同時加工方便、成本低,在有限的空間內最大程度增大了無人機的機翼升力面積。
由于無人機在空中大部分時間是進行巡航飛行,飛行速度在20~40 m/s,不需要較大的機動能力,同時由于機翼要進行折疊,機翼的厚度不能太厚,占用有限的折疊空間。本文選擇了3種典型翼型進行參數設計(見表1)。
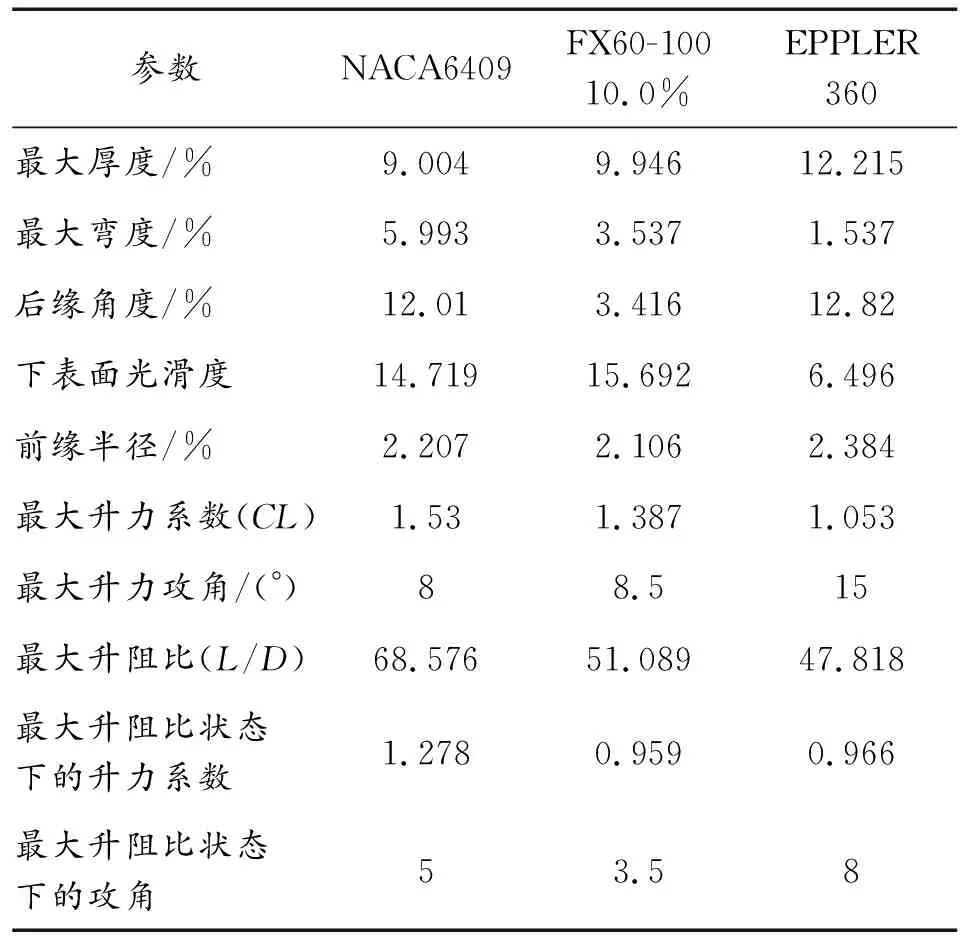
表1 3種典型翼型參數Table 1 Comparison of parameters of three typical airfoils
綜合考慮無人機飛行高度、飛行速度、發射筒尺寸等參數要求,以及在相同阻力下保持機翼最大的升力,節省動力,最終選擇具有最大升阻比的NACA6409翼型,同時基于目標壓力分布反設計思路,運用Takanashi迭代程序完成翼型優化設計。
前后機翼均采用碳纖維夾心結構進行制作。后翼設計有翼梢小翼,起到航向穩定的作用。在后翼設計有舵面,舵面偏轉方向一致時,進行俯仰控制。舵面進行差動時,進行滾轉方向控制。前機翼采用分開式旋轉折疊方式,后機翼采用單軸旋轉折疊方式。圖2為設計的氣動布局與結構示意圖。
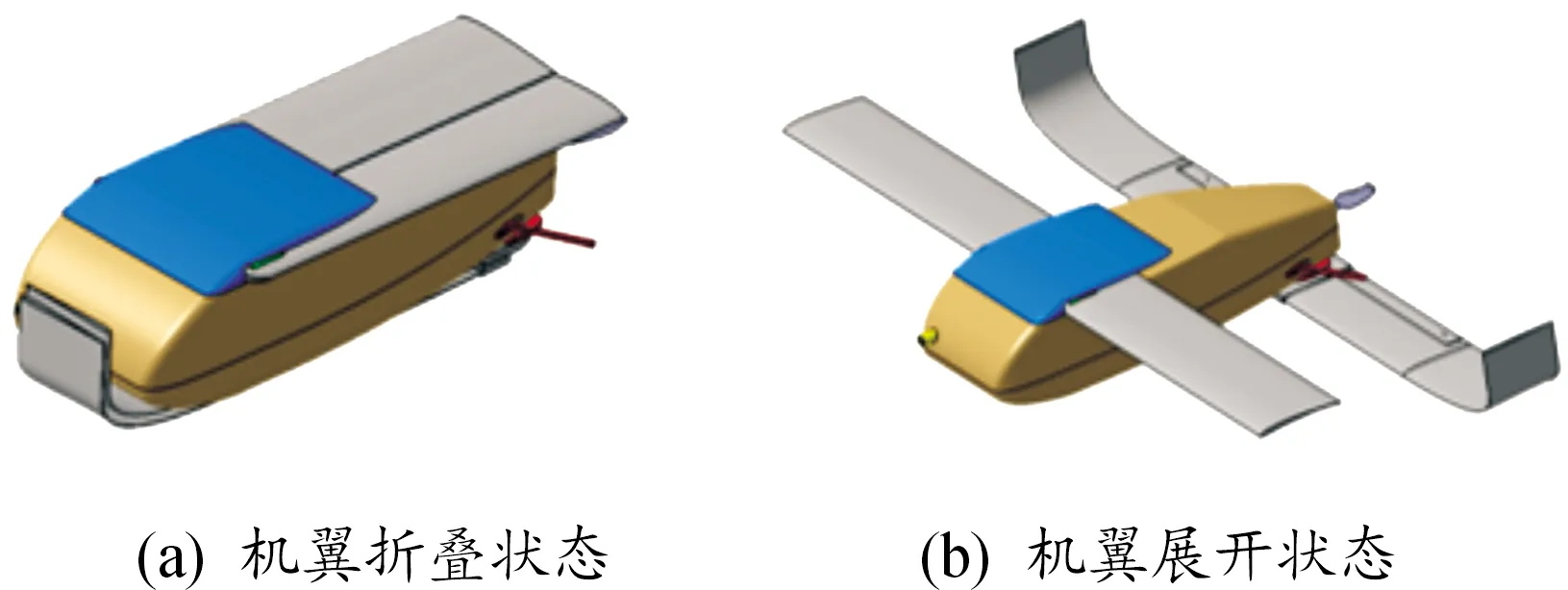
圖2 無人機氣動布局與結構示意圖Fig.2 Pneumatic layout and structure diagram of UAV
建立外流場計算域為φ15 m×15 m的數值風洞,利用ANSYS進行網格劃分、仿真,網格采用四面體非結構化網格,對前翼、后翼的小尺寸邊緣(后緣)區域網格進行局部加密。仿真結果如圖3所示。

圖3 氣動仿真結果曲線Fig.3 Aerodynamic simulation results
經仿真得出:攻角0°~5°時升阻比達到10以上,在1.3°進行巡飛,最有利于增大續航時間。
2.2 動力系統設計及選型
根據研制經驗和借鑒其他經驗,無人機采用鋰電池、無刷電機、螺旋槳動力系統,后推動力方式。為了降低成本,通過對市場的該類產品進行調研選型,A2212型電機搭配5045塑料槳在固定翼、多旋翼上有廣泛的應用。選型的電機型號為新西達A2212、1 950 kV,螺旋槳為5045塑料槳。螺旋槳槳葉直接連接在電機軸上。經無人機動力系統測試臺測試(如圖4所示),5045型螺旋槳在PWM值1 400時,拉力300 g,功率50 W(見表2),動力系統滿足無人機飛行性能要求。
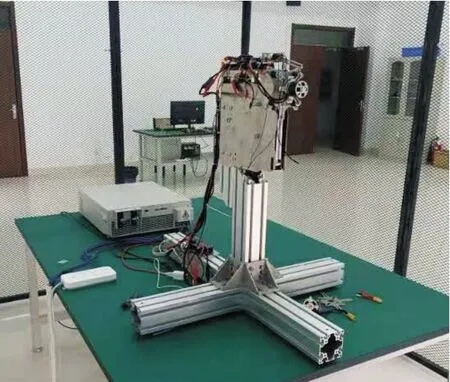
圖4 無人機動力系統測試臺圖Fig.4 UAV power system test bench
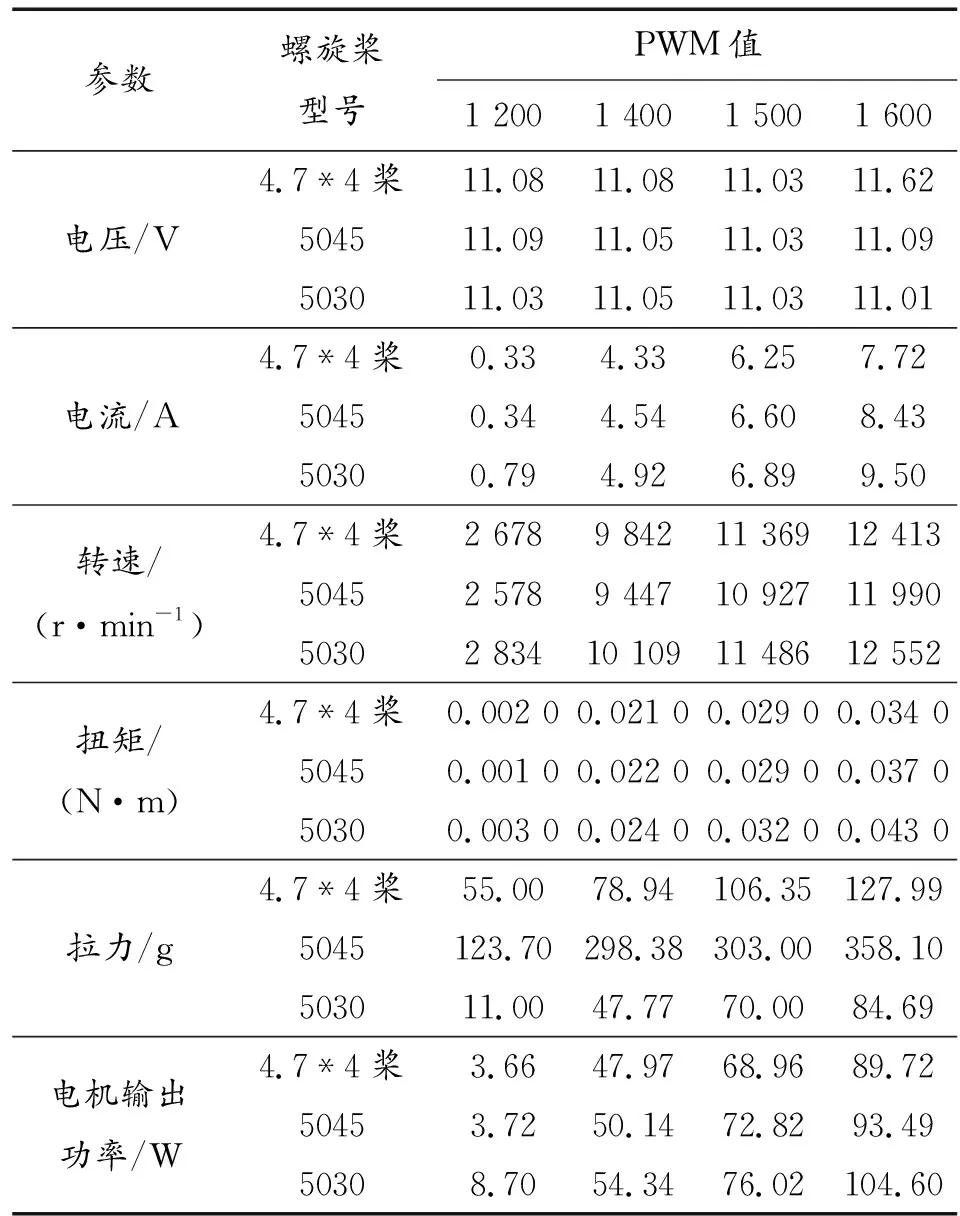
表2 電機適配3種螺旋槳靜態測試結果Table 2 Static test results of three kinds of propeller for motor adaptation
2.3 無人機電氣選型
為了降低成本,機載電氣采用商用貨架產品,對其連接線進行適應性改制。以深圳樂迪公司的Minipix自駕儀為核心搭建整機的電氣系統。
自駕儀選用深圳樂迪公司的Mini Pix自駕儀,該自駕儀基于APM硬件進行了適當的改進,配置采用F405處理器,比原版運行速度更快。
利用擴展板與自駕儀的總線接口連接,將GPS、空速計通過該接口與自駕儀連接;數據鏈通過自駕儀的“TELEM1”數傳/OSD接口1與自駕儀連接;好盈5 V/3 A的UBEC通過“POWER”接口與自駕儀連接;遙控接收機與自駕儀的“RC IN”信號輸入接口連接;舵機及電調與自駕儀的“ESC”主輸出接口連接。其自駕儀及接口如圖5所示。
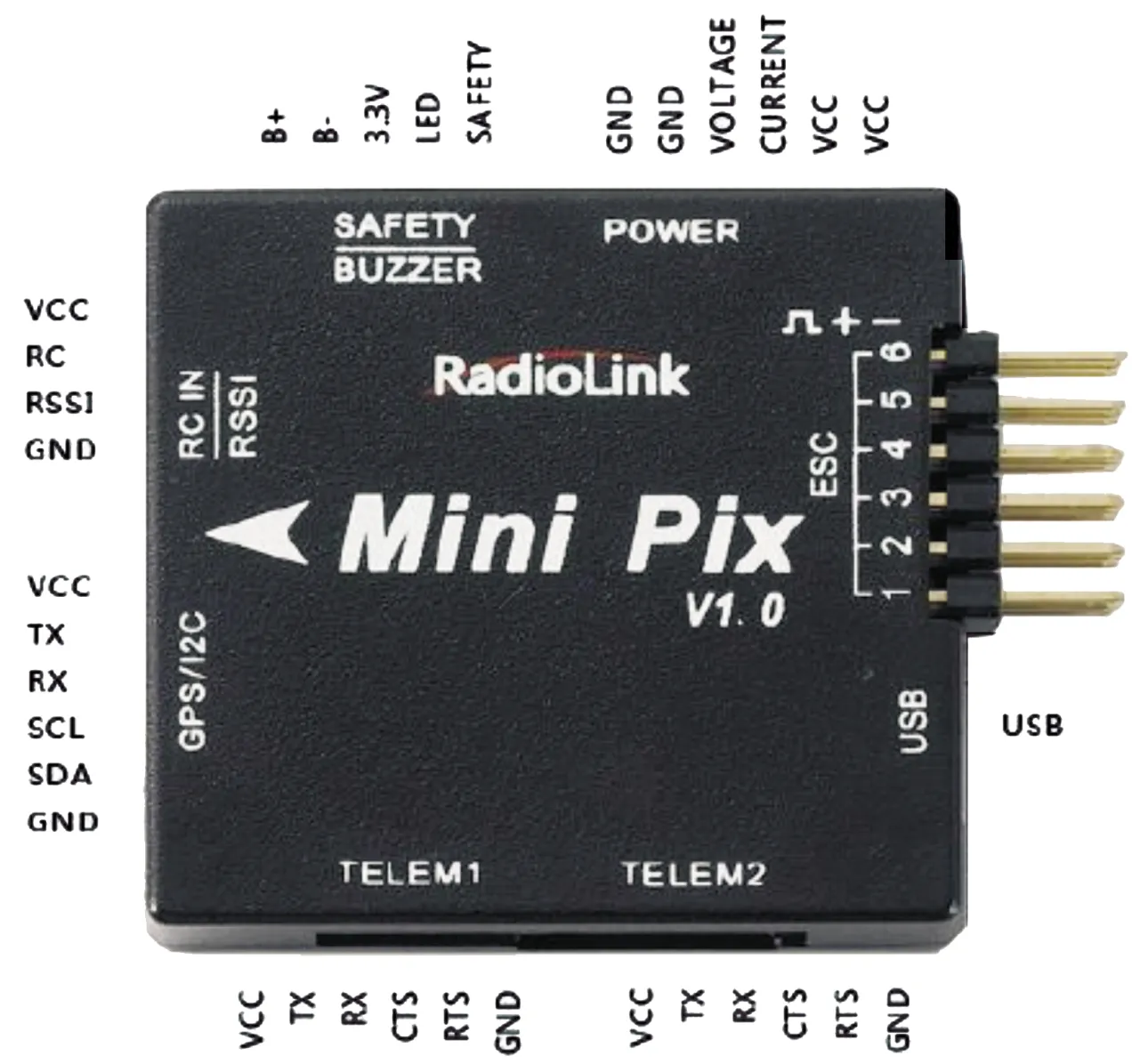
圖5 Mini Pix自駕儀及接口圖Fig.5 Mini pix self driving instrument and interface
衛星定位模塊采用深圳樂迪公司的Mini M8N GPS,型號TS100(見圖6)。采用與陶瓷天線精準匹配的前置LNA低損耗電路設計,在理想濾干擾前提下增強了捕獲極弱信號的能力;通過最優電路布局,在捕捉極弱信號的同時有效抑制輸入性干擾。50 cm定位精度,開闊地帶6 s內搜星可達20顆,極強谷底定位能力。

圖6 TS100衛星定位模塊圖Fig.6 TS100 satellite positioning module
空速計由皮托靜壓管和數字處理電路等2個部分組成(見圖7)。數字處理電路的數字輸出采用I2C接口,補償范圍內的總誤差小于1.0%。數字輸出對比模擬輸出能減少干擾。選用精量電子(深圳)有限公司的MS5525DSO數字壓力傳感器。
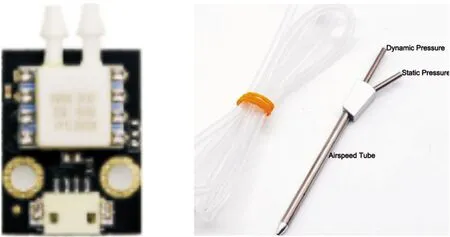
圖7 數字處理電路與皮托靜壓管圖Fig.7 Digital processing circuit and pitot static pressure tube
數據鏈選用廣州雷迅科技的PW-Link數傳模塊,該模塊是由CUAV研發的一款2.4 G無線WIFI數傳模塊;它可以用于無人機近距離通信或調試,采用外置天線版本。后續可根據飛行器的使用場景,更換不同的數據鏈。
遙控接收機選用深圳樂迪的R6DSM型2.4G十通道接收機,該接收機采用DSSS和FHSS雙擴頻抗干擾技術,適用于樂迪九通道遙控器AT9,AT9S;樂迪十通道遙控器AT10,AT10II,質量低至1.5 g,非常適用于微小型飛行器上使用。
3 無人機控制方案設計
根據無人機彈道規劃和制導律設計要求,將整個飛行過程分為4個階段。飛行控制系統在各個階段的工作狀態為:
1) 投放階段,無人機處于折疊狀態,控制不工作;
2) 穩定飛行階段,無人機從圓形發射筒釋放,滾轉通道指令為0,通過俯仰通道的控制,實現無人機由下降俯沖狀態,切換至水平飛行狀態;
3) 滑翔過程中,這時候主要通過控制滾轉姿態來間接控制飛行器的航向,從而將飛行器導引到預定航點周圍/繞航點螺旋下降,另外通過俯仰通道的控制來調節下降速率;
4) 動力飛行階段,達到任務飛行高度(或者是滑翔最低高度)后,動力系統開始工作,通過控制滾轉姿態來間接控制飛行器的航向,并且通過俯仰通道的控制來維持平飛或俯沖的動作。
經分析,無人機從發射筒釋放到水平飛行控制較為復雜,建立該無人機的該階段縱向控制Simulink仿真模型。如圖8所示。在仿真系統中,設定無人機的俯仰角期望為0°,設定初始狀態為:俯仰角=-80°,水平速度=2 m/s(對地速度),垂直速度=20 m/s(對地速度),推力為10 N,分析改初過程中速度、高度、姿態角、迎角等狀態量的變化,進而分析無人機的大姿態角(傘降)改初能力。
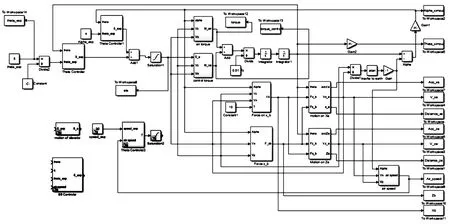
圖8 無人機控制Simulink仿真模型示意圖Fig.8 Simulink simulation model of UAV Control
無人機在2.44 s內改平(有震蕩),2.72 s后高度不再下降,改初過程最大下降高度為39.47 m。部分狀態量變化曲線如圖9所示。根據仿真結果,無人機可以在較快的時間內完成改初。升降舵舵面設計是合理的,舵效可以滿足無人機傘降改初過程的要求。
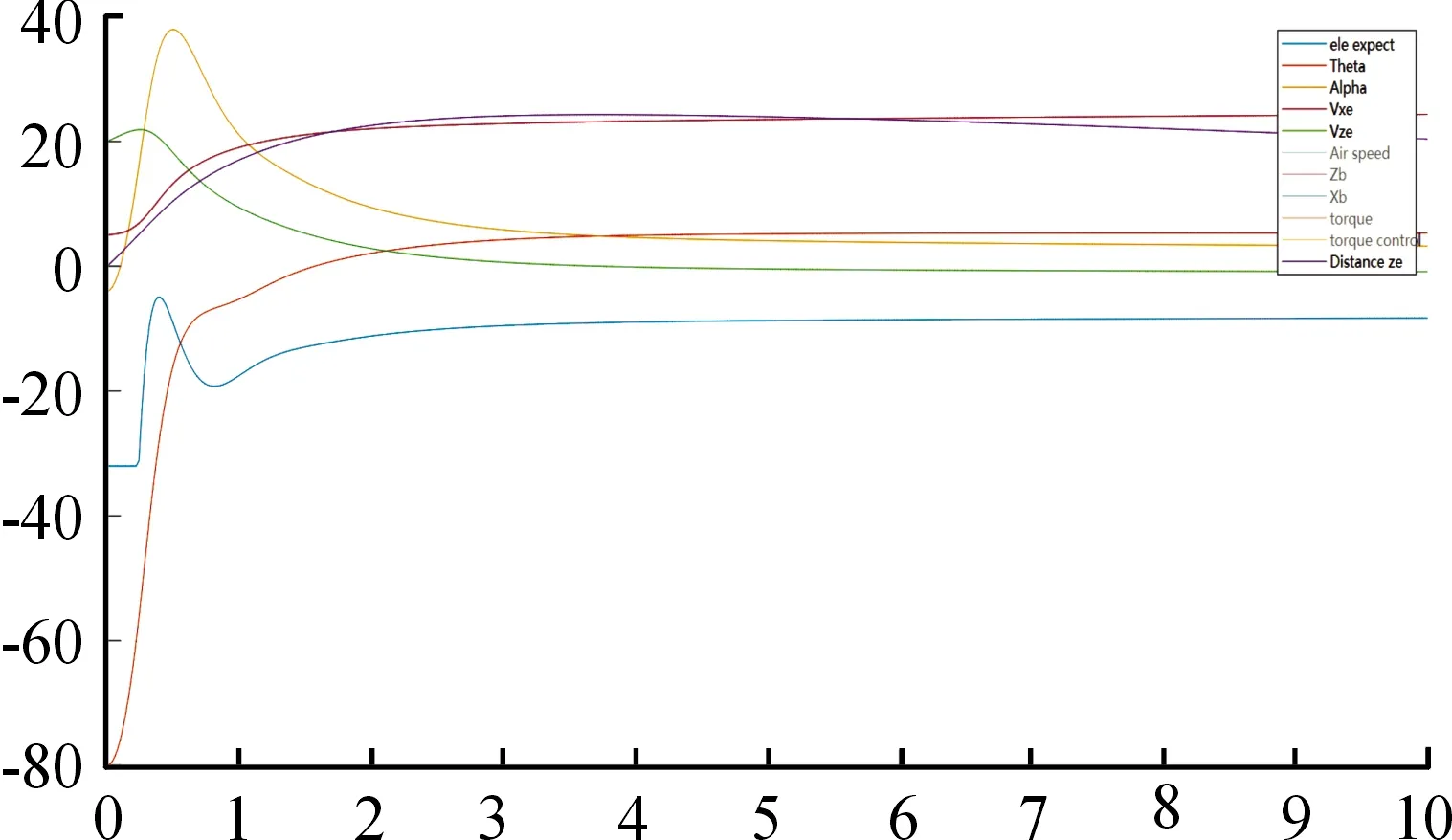
圖9 帶迎角控制器的改初過程狀態量變化曲線Fig.9 Change curve of state quantity in initial modification process with angle of attack controller
4 關鍵技術試驗驗證
4.1 無人機結構強度、剛度地面驗證試驗
由于折疊機翼的厚度較薄,強度和剛度設計余量較小,需在飛行試驗前進行強度、剛度測試。試驗過程為操作人員將裝配好的無人機固定于車頂,駕駛員將汽車的速度提升至72 km/h,觀察機翼的變化,并通過舵面的驅動,驗證后翼舵面驅動機構的可靠性,如圖10所示。經試驗驗證,機翼剛強度、后翼舵面驅動機構滿足使用要求。
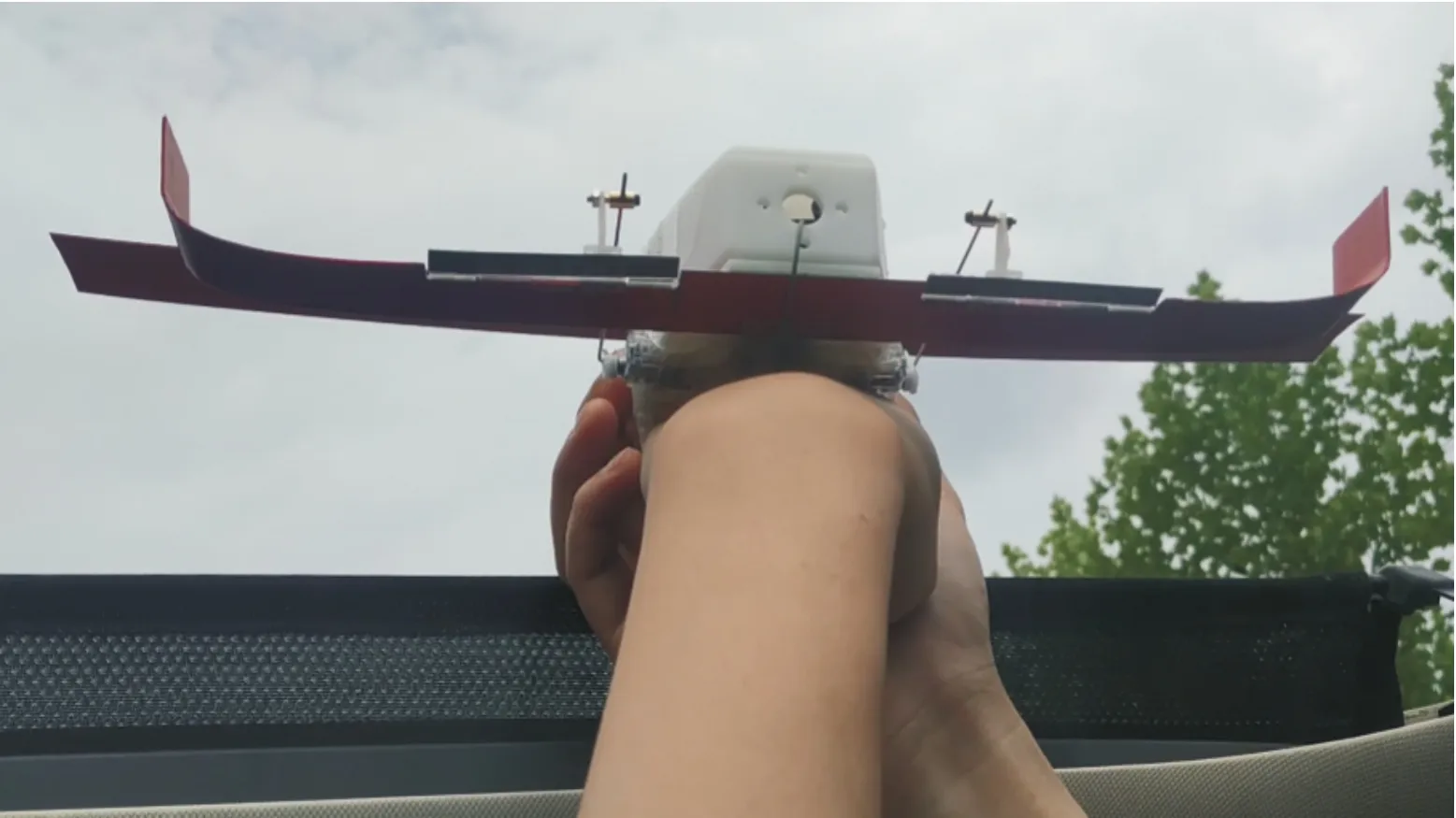
圖10 強度、剛度地面驗證試驗場景圖Fig.10 Strength and stiffness ground verification test
4.2 俯仰通道PID控制參數測定試驗
通過地面跑車試驗確定合適的俯仰通道PID控制參數。在飛行器達到72 km/h的速度時,給定抬頭100%的升降舵量擾動,自駕儀進行自動控制,確定滿足在受擾動后30s內恢復穩定飛行狀態的PID參數(如圖11所示)。

圖11 擾動下俯仰姿態角、俯仰角速率控制效果曲線Fig.11 Control effect curve of pitch attitude angle and pitch angle rate under disturbance
4.3 地面彈射飛行試驗
無人機采用彈射起飛方式,油門及舵面在彈射過程中進行鎖定,在離架之后啟動電機。整個過程采用Auto飛行模式,通過設置合理的航點,驗證氣動樣機具備飛行的能力,其試驗現場如圖12所示。

圖12 地面彈射飛行試驗場景圖Fig.12 Ground ejection flight test
4.4 空中投放飛行試驗
利用多旋翼無人機將實驗無人機上升到一定高度,然后釋放樣機,樣機根據預定程序進行姿態修正,完成初始改平飛,最后滑翔降落。試驗流程如圖13所示。

圖13 空中投放試驗流程框圖Fig.13 Air drop test flow chart
對整個投放-穩定飛行過程的自駕儀機載數據進行分析,其完成投放過程的時間為4 s。在釋放的瞬間由于“頭重尾輕”,出現樣機低頭情況,隨著樣機的飛行速度提升,舵效增加,飛行在4 s內完成了-80°下落至水平飛行的姿態修正。空中投放過程如圖14所示。
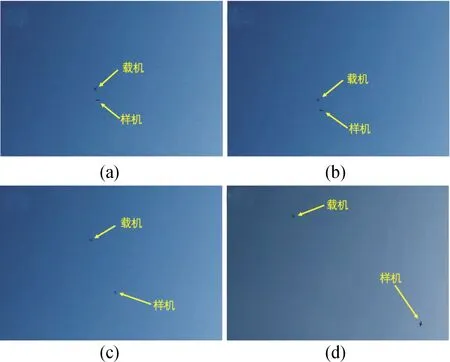
圖14 空中投放過程示意圖Fig.14 Air delivery process
5 結論
設計和試制了一種機翼可折疊、高空投放的小型無人機,完成了關鍵飛行狀態下控制系統方案設計、仿真,驗證了該無人機的飛行性能,可在較短時間內完成初始轉平飛狀態。同時完成了原理樣機的地面彈射起飛與中低空投放試驗,為樣機高空投放打下了基礎。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
