全方位運(yùn)動(dòng)車輛變結(jié)構(gòu)耦合同步控制策略研究
2022-07-10 09:59:44張?jiān)ツ?/span>閆猛飛尚穎輝
兵器裝備工程學(xué)報(bào) 2022年6期
關(guān)鍵詞:控制策略結(jié)構(gòu)
張?jiān)ツ希Z猛飛,房 遠(yuǎn),尚穎輝
(陸軍裝甲兵學(xué)院 兵器與控制系, 北京 100072)
1 引言
全方位運(yùn)動(dòng)車輛以其靈活機(jī)動(dòng)的運(yùn)動(dòng)方式被廣泛應(yīng)用于航空航天、軌道交通、醫(yī)療救護(hù)、物流搬運(yùn)等領(lǐng)域,給人們的生產(chǎn)生活帶來(lái)了極大的便利。然而當(dāng)遇到路況不佳、障礙物等因素,亦或是負(fù)載偏載導(dǎo)致各個(gè)輪子載荷不均時(shí),就會(huì)導(dǎo)致各個(gè)驅(qū)動(dòng)電機(jī)轉(zhuǎn)速失同步,進(jìn)而出現(xiàn)整車沿預(yù)期運(yùn)動(dòng)方向軌跡偏移的情況。
國(guó)內(nèi)外關(guān)于多電機(jī)轉(zhuǎn)速同步控制的研究已十分廣泛,且成果頗豐,典型的幾種同步控制結(jié)構(gòu)有并行控制、主從控制、交叉耦合控制、偏差耦合控制等,不同的控制結(jié)構(gòu)適用于不同的場(chǎng)景。其中主從控制適用于各電機(jī)之間轉(zhuǎn)動(dòng)慣量相差較大且具有明顯主從關(guān)系的場(chǎng)合,交叉耦合控制同步性能較好,但只適合于2個(gè)電機(jī)之間的同步,偏差耦合控制在交叉耦合控制的基礎(chǔ)上,將系統(tǒng)中進(jìn)行同步的電機(jī)數(shù)目拓展至多個(gè),是一種同步性能較好的多電機(jī)同步控制方法。而目前全方位運(yùn)動(dòng)車輛多采用并行控制方法,原因是其結(jié)構(gòu)簡(jiǎn)單易實(shí)現(xiàn)。文獻(xiàn)[9]將單電機(jī)模糊PID速度閉環(huán)控制與多電機(jī)并行控制相結(jié)合,使全向移動(dòng)平臺(tái)輪組之間達(dá)到了較好的協(xié)同性,但并行控制結(jié)構(gòu)因各電機(jī)相互之間無(wú)耦合關(guān)系,僅靠單個(gè)電機(jī)的跟蹤性能來(lái)減小多電機(jī)之間的同步誤差,可想而知這將無(wú)法克服外界因素導(dǎo)致的全向移動(dòng)平臺(tái)軌跡偏移問題。
本文結(jié)合全方位運(yùn)動(dòng)的特點(diǎn),提出了一種變結(jié)構(gòu)耦合同步控制策略:在偏差耦合結(jié)構(gòu)速度補(bǔ)償器中加入三軸手柄電壓判斷條件,使整車在直行、橫移以及中心轉(zhuǎn)向時(shí)采用四電機(jī)偏差耦合控制,以任意角度斜行時(shí)亦可進(jìn)行車體對(duì)角線兩電機(jī)交叉耦合控制,從而在保證整車運(yùn)動(dòng)靈活性的基礎(chǔ)上,改善其軌跡偏移問題,提高運(yùn)動(dòng)的精準(zhǔn)性。
2 全方位運(yùn)動(dòng)分析
全方位運(yùn)動(dòng)的實(shí)現(xiàn)得益于2個(gè)條件,首先是具有二自由度移動(dòng)機(jī)構(gòu),其次是利用分布式電驅(qū)動(dòng)控制系統(tǒng)實(shí)現(xiàn)運(yùn)動(dòng)控制,二者缺一不可。以全方位移動(dòng)履帶為例,在傳統(tǒng)履帶板上設(shè)計(jì)偏置滾輪,將原來(lái)地面對(duì)履帶的摩擦力由縱向轉(zhuǎn)換到沿滾輪軸線方向,再通過分布式電驅(qū)動(dòng)控制系統(tǒng)實(shí)現(xiàn)各個(gè)驅(qū)動(dòng)電機(jī)不同轉(zhuǎn)速與轉(zhuǎn)向的協(xié)調(diào)配合,從而使4條履帶受地面作用力的矢量合成沿不同方向,以此賦予整車全方位運(yùn)動(dòng)的能力。全方位運(yùn)動(dòng)學(xué)方程如式(1)所示:

(1)
其中,~表示4個(gè)驅(qū)動(dòng)電機(jī)的角速度,表示驅(qū)動(dòng)輪的半徑,和分別代表履帶接地中心到車體幾何中心的垂向距離和縱向距離,(,,)表示車體的速度矢量,各分量依次表示縱向移動(dòng)速度,橫向移動(dòng)速度,繞中心旋轉(zhuǎn)角速度。由式(1)可得:
1) 當(dāng)=-=-=時(shí),此時(shí)≠0,=0,=0,即橫移速度分量與旋轉(zhuǎn)速度分量為0,叉車進(jìn)行前后直行運(yùn)動(dòng)。
2) 當(dāng)==-=-時(shí),此時(shí)=0,≠0,=0,即直行速度分量與旋轉(zhuǎn)速度分量為0,叉車進(jìn)行左右橫移運(yùn)動(dòng)。
3) 當(dāng)===時(shí),此時(shí)=0,=0,≠0,即直行速度分量與橫移速度分量為0,叉車進(jìn)行原地中心轉(zhuǎn)向運(yùn)動(dòng)。
4) 當(dāng)=-=(sin-cos),=-=-(sin+cos)時(shí),此時(shí)=sin,=cos,=0,叉車可在平面以任意角度進(jìn)行平移運(yùn)動(dòng)。
如圖1所示是4種典型的全方位運(yùn)動(dòng)輪組協(xié)調(diào)配合關(guān)系。

圖1 4種典型運(yùn)動(dòng)輪組協(xié)調(diào)配合示意圖Fig.1 Coordination and cooperation of four typical sports wheel sets
需要說(shuō)明一點(diǎn)的是,車體4個(gè)驅(qū)動(dòng)電機(jī)同側(cè)安裝方向相同,對(duì)側(cè)安裝具有鏡面對(duì)稱關(guān)系。因此如果電機(jī)1向車體前方旋轉(zhuǎn)為正轉(zhuǎn)的話,則電機(jī)2向車體前方旋轉(zhuǎn)就為反轉(zhuǎn),3、4電機(jī)同理。
通常在三軸工業(yè)手柄3個(gè)軸的輸出電壓、、與車輛整體速度、、之間建立映射關(guān)系,代入式(1),由DSP計(jì)算出4條履帶驅(qū)動(dòng)電機(jī)的轉(zhuǎn)速與轉(zhuǎn)向,通過CAN總線發(fā)送到各個(gè)電機(jī)驅(qū)動(dòng)器,協(xié)調(diào)控制各個(gè)電機(jī)轉(zhuǎn)動(dòng),以此達(dá)到全方位運(yùn)動(dòng)控制的目的。
3 基于全方位運(yùn)動(dòng)規(guī)律的變結(jié)構(gòu)耦合同步控制策略
由上節(jié)分析可知,全方位運(yùn)動(dòng)特殊性在于:當(dāng)進(jìn)行直行、橫移以及中心轉(zhuǎn)向運(yùn)動(dòng)時(shí),4個(gè)驅(qū)動(dòng)電機(jī)轉(zhuǎn)速大小相等,當(dāng)在平面內(nèi)以任意角度進(jìn)行斜行運(yùn)動(dòng)時(shí),1、3電機(jī)轉(zhuǎn)速大小相等,2、4電機(jī)轉(zhuǎn)速大小相等,1、3電機(jī)與2、4電機(jī)之間轉(zhuǎn)速大小不等。因此,當(dāng)全方位運(yùn)動(dòng)車輛沿不同方向運(yùn)動(dòng)時(shí),保證相應(yīng)驅(qū)動(dòng)電機(jī)之間的轉(zhuǎn)速實(shí)時(shí)同步是使其沿預(yù)期方向精準(zhǔn)運(yùn)動(dòng)的關(guān)鍵。
偏差耦合控制在多電機(jī)同步控制系統(tǒng)中具有較高的同步性能以及較強(qiáng)的抗干擾性,其保持系統(tǒng)同步的關(guān)鍵在于各電機(jī)的速度補(bǔ)償器,如圖2所示是四電機(jī)偏差耦合控制系統(tǒng)中電機(jī)1的速度補(bǔ)償器。
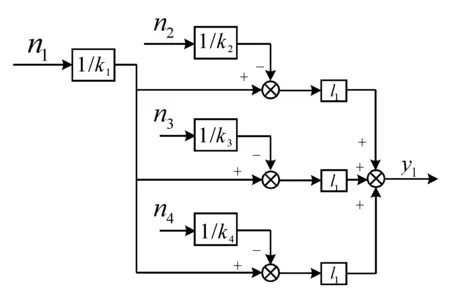
圖2 電機(jī)1的速度補(bǔ)償器結(jié)構(gòu)示意圖Fig.2 The speed compensator structure of motor 1
其中、分別是第、個(gè)電機(jī)的實(shí)際轉(zhuǎn)速,、是相應(yīng)電機(jī)的同步比例系數(shù),為第個(gè)電機(jī)的補(bǔ)償系數(shù),是每個(gè)電機(jī)的轉(zhuǎn)速補(bǔ)償值。
當(dāng)各電機(jī)的同步比例系數(shù)均為1時(shí),這種補(bǔ)償結(jié)構(gòu)能夠保持4個(gè)電機(jī)轉(zhuǎn)速嚴(yán)格同步,但同時(shí)也將無(wú)法做到各電機(jī)之間轉(zhuǎn)速的差異化,即不能做到上述1、3電機(jī)轉(zhuǎn)速大小相等,2、4電機(jī)轉(zhuǎn)速大小相等,1、3電機(jī)與2、4電機(jī)之間轉(zhuǎn)速大小不等。屆時(shí)雖然可以完成直行、橫移、中心轉(zhuǎn)向等運(yùn)動(dòng)方式,但將無(wú)法進(jìn)行任意角度的斜行運(yùn)動(dòng),導(dǎo)致運(yùn)動(dòng)靈活性降低。
為了克服這一矛盾,本文結(jié)合偏差耦合控制在四電機(jī)同步系統(tǒng)中性能最優(yōu)、抗干擾能力最強(qiáng)的特點(diǎn)以及交叉耦合控制只適用于2個(gè)電機(jī)保持同步的特點(diǎn),在此提出一種基于全方位運(yùn)動(dòng)規(guī)律的變結(jié)構(gòu)耦合同步控制策略,以此實(shí)現(xiàn)全方位運(yùn)動(dòng)車輛在直行、橫移以及中心轉(zhuǎn)向時(shí)四電機(jī)偏差耦合控制,在斜行時(shí)1、3電機(jī)交叉耦合控制,2、4電機(jī)交叉耦合控制,從而兼顧其運(yùn)動(dòng)的靈活性與運(yùn)動(dòng)軌跡的精準(zhǔn)性。圖3所示是基于全方位運(yùn)動(dòng)規(guī)律的變結(jié)構(gòu)耦合同步控制策略結(jié)構(gòu)。
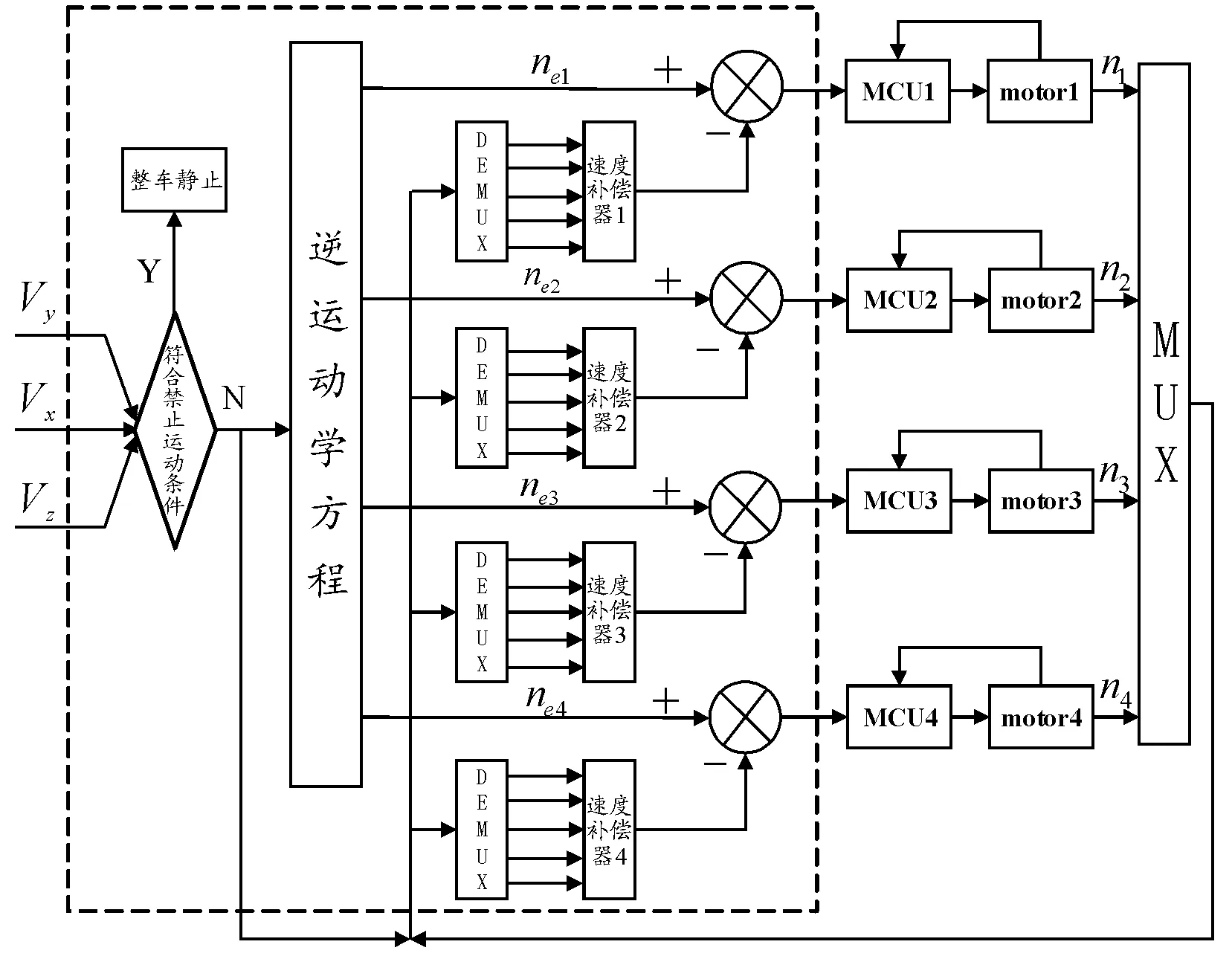
圖3 基于全方位運(yùn)動(dòng)規(guī)律的變結(jié)構(gòu)耦合同步控制策略結(jié)構(gòu)圖Fig.3 Structure diagram of variable structure coupled synchronous control strategy based on omni-directional motion law
由于全方位運(yùn)動(dòng)車輛的控制方式直接建立在操縱手柄的三軸采樣電壓輸出上,當(dāng)僅有軸電壓輸出時(shí),叉車進(jìn)行直行運(yùn)動(dòng);當(dāng)僅有軸電壓輸出時(shí),叉車進(jìn)行橫移運(yùn)動(dòng);當(dāng)僅有軸電壓輸出時(shí),叉車進(jìn)行中心轉(zhuǎn)向運(yùn)動(dòng);當(dāng)同時(shí)有軸與軸的電壓輸出時(shí),叉車在二維平面內(nèi)進(jìn)行任意角度斜行運(yùn)動(dòng);且每個(gè)電機(jī)的控制指令通過手柄三軸輸出電壓、、利用逆運(yùn)動(dòng)學(xué)方程逆向解算而來(lái),因此可通過在每個(gè)電機(jī)的速度補(bǔ)償器中加入手柄輸出電壓判斷條件以此完成偏差耦合控制與交叉耦合控制的切換。
以電機(jī)1的速度補(bǔ)償器為例進(jìn)行說(shuō)明,其他電機(jī)速度補(bǔ)償器可依此類推,其結(jié)構(gòu)如圖4所示。

圖4 加入手柄電壓判斷條件的電機(jī)1的速度補(bǔ)償器結(jié)構(gòu)示意圖Fig.4 Add handle voltage judgment condition to motor 1’s speed compensator
對(duì)電機(jī)1來(lái)說(shuō),無(wú)論何種運(yùn)動(dòng)方式,電機(jī)1與電機(jī)3均需要產(chǎn)生耦合關(guān)系,但電機(jī)1與電機(jī)2、電機(jī)1與電機(jī)4需視情而定。因此,在電機(jī)1與電機(jī)2、電機(jī)1與電機(jī)4的耦合關(guān)系中加入三軸手柄輸出電壓判斷條件,當(dāng)軸與軸同時(shí)有電壓輸出時(shí),斷開其耦合關(guān)系。耦合結(jié)構(gòu)切換判定條件如圖5所示。

圖5 耦合結(jié)構(gòu)切換判定條件框圖Fig.5 Judgment conditions of coupling structure switching
在此說(shuō)明一點(diǎn),當(dāng)出現(xiàn)其他兩軸及兩軸以上形式的電壓輸出時(shí),因其對(duì)應(yīng)的運(yùn)動(dòng)形式不符合正常的駕駛習(xí)慣,且在車輛載貨時(shí),尤其是對(duì)全方位移動(dòng)叉車來(lái)說(shuō),具有一定的安全隱患,因此應(yīng)當(dāng)對(duì)這些運(yùn)動(dòng)形式加以禁止,其判定條件如圖6所示。
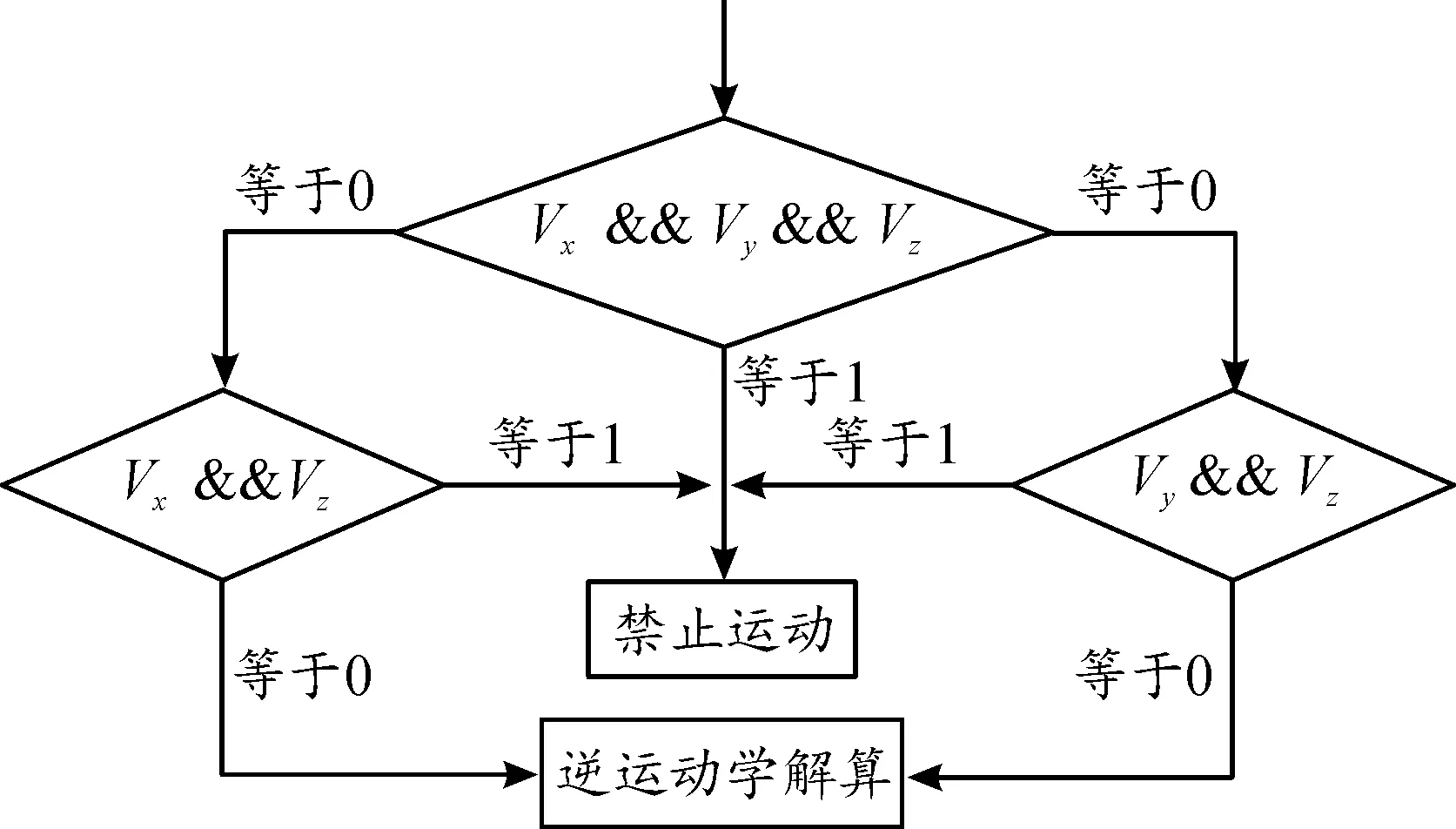
圖6 禁止運(yùn)動(dòng)判定條件框圖Fig.6 Motion prohibited judgment conditions
4 仿真結(jié)果與分析
為了驗(yàn)證本文提出的基于全方位運(yùn)動(dòng)規(guī)律的變結(jié)構(gòu)耦合同步控制策略,在Matlab/Simulink中建立仿真模型,現(xiàn)選取3種情況進(jìn)行仿真,分別是給定單軸電壓,給定雙軸電壓、,給定三軸電壓、、。為了使結(jié)果更加直觀可信,將前2種情況合并仿真。
在如圖3所示的仿真模型中,初始給定等于0,等于100,等于0,對(duì)應(yīng)直行運(yùn)動(dòng)(前進(jìn)),在0.2 s時(shí)給電機(jī)1施加15 NM負(fù)載干擾;在0.3 s時(shí)給定變?yōu)?30,變?yōu)?0,不變,對(duì)應(yīng)任意角度斜行(左前方向)在0.4 s時(shí)給電機(jī)3施加15 NM負(fù)載干擾,在0.5 s時(shí)給電機(jī)2施加5 NM的負(fù)載干擾,由于電壓大小最終轉(zhuǎn)化為電機(jī)轉(zhuǎn)速快慢,因此上述數(shù)值的單位皆為r/min,仿真時(shí)間共計(jì)0.6 s,結(jié)果如圖7所示。
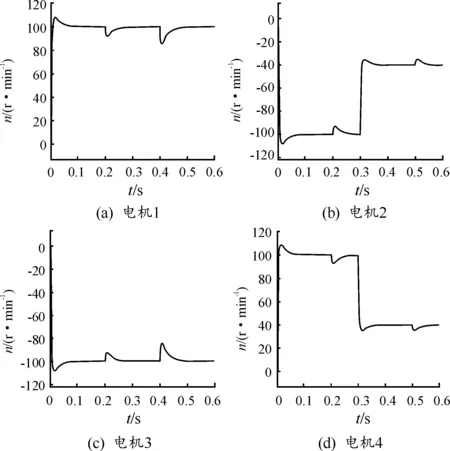
圖7 直行與斜行切換控制仿真結(jié)果曲線Fig.7 Simulation results of straight and oblique switching control
軌跡偏移的實(shí)質(zhì)在于各電機(jī)之間轉(zhuǎn)速不同步,那么解決軌跡偏移的關(guān)鍵就在于盡可能的使各電機(jī)保持同步,由仿真結(jié)果看出,在0.2 s給電機(jī)1施加負(fù)載干擾導(dǎo)致其速度減小之后,其余3個(gè)電機(jī)均能在很短時(shí)間內(nèi)做出減速反應(yīng),且速度變化量與電機(jī)1基本一致,表明4個(gè)電機(jī)有很好的同步性能,當(dāng)0.3 s變成斜行運(yùn)動(dòng)之后,在0.4 s時(shí)給電機(jī)3施加負(fù)載干擾,只有電機(jī)1速度跟隨變化,在0.5 s時(shí)給電機(jī)2施加負(fù)載干擾,只有電機(jī)4速度跟隨變化,速度的變化量基本都相同,由此表明圖5所示模型成功實(shí)現(xiàn)了偏差耦合控制與交叉耦合控制的切換,同時(shí)各電機(jī)轉(zhuǎn)速大小與方向符合全方位運(yùn)動(dòng)輪組協(xié)調(diào)配合規(guī)律,證明該控制策略有較好的同步性與靈活性。
5 實(shí)車試驗(yàn)
以自主設(shè)計(jì)的履帶式全方位移動(dòng)叉車進(jìn)行實(shí)車試驗(yàn),如圖8所示。其運(yùn)動(dòng)控制器采用TI公司的TMS320F2812為主控芯片進(jìn)行軟硬件設(shè)計(jì),該控制芯片是一款高性價(jià)比的32位DSP,主頻可達(dá)150 MHz,完全滿足控制需求。其中硬件電路設(shè)計(jì)主要包括電源電路、最小系統(tǒng)電路、AD采樣電路、CAN通信電路、SCI串口通信電路,故障報(bào)警電路以及其他預(yù)留接口電路。系統(tǒng)采用80 V鉛酸蓄電池為整車供電,電機(jī)控制器采用薩牌公司的ACE2交流控制器。其控制結(jié)構(gòu)如圖9所示。

圖8 履帶式全方位移動(dòng)叉車實(shí)物圖Fig.8 Tracked omnidirectional mobile forklift truck
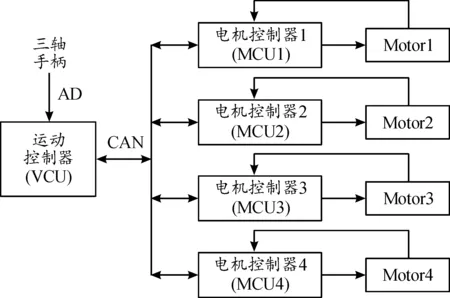
圖9 系統(tǒng)控制結(jié)構(gòu)框圖Fig.9 System control structure
運(yùn)動(dòng)控制器采集三軸手柄電壓進(jìn)行AD轉(zhuǎn)換,通過CAN總線將控制信號(hào)傳遞給各電機(jī)控制器進(jìn)行行駛控制,各電機(jī)控制器通過CAN總線實(shí)時(shí)反饋電機(jī)轉(zhuǎn)速、電流、故障等運(yùn)行狀態(tài),供運(yùn)動(dòng)控制器決策使用。
實(shí)車試驗(yàn)中分別采用本文提出的變結(jié)構(gòu)耦合同步控制策略與并行控制策略進(jìn)行對(duì)比,選取一寬闊場(chǎng)地,讓履帶式全方位移動(dòng)叉車負(fù)載3T,從而使4個(gè)驅(qū)動(dòng)電機(jī)負(fù)載工況不同,分別進(jìn)行直行、橫移、中心轉(zhuǎn)向以及45°斜行,每個(gè)運(yùn)動(dòng)進(jìn)行5次試驗(yàn),統(tǒng)計(jì)其沿預(yù)定運(yùn)動(dòng)軌跡行駛偏移情況,結(jié)果如下:
1) 直行運(yùn)動(dòng),行駛10 m,結(jié)果如表1所示。直行運(yùn)動(dòng)時(shí),車體兩側(cè)電機(jī)總負(fù)載相差不大,排除人為操作駕駛因素影響,兩組實(shí)驗(yàn)結(jié)果理論上相差不大,相比車輛總體尺寸,這一偏差在允許范圍內(nèi)。
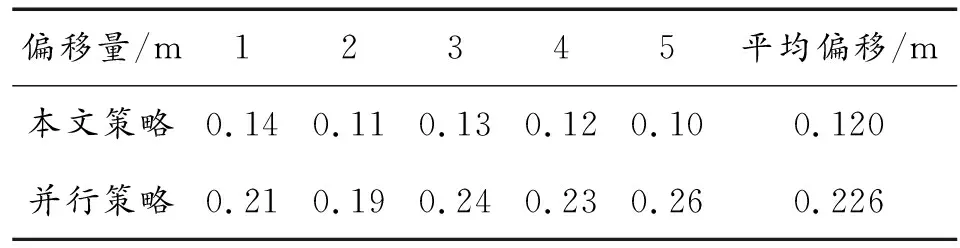
表1 直行運(yùn)動(dòng)試驗(yàn)統(tǒng)計(jì)結(jié)果Table 1 Statistical results of straight motion test
2) 橫移運(yùn)動(dòng),行駛10 m,結(jié)果如表2所示。車體后側(cè)兩電機(jī)較之于車體前側(cè)兩電機(jī)負(fù)載較小,電機(jī)之間若無(wú)耦合控制,其運(yùn)行差異必定增大,當(dāng)后側(cè)電機(jī)轉(zhuǎn)速快于前側(cè)電機(jī)導(dǎo)致車體姿態(tài)偏轉(zhuǎn)之后,車輛將沿著偏移方向繼續(xù)運(yùn)行,軌跡偏移量也必將隨著行進(jìn)距離的增加而增大,由表2中結(jié)果看出橫移運(yùn)動(dòng)時(shí),本文控制策略相較于并行控制能夠大大減小全方位叉車的軌跡偏移量,減小量約為57.9%。
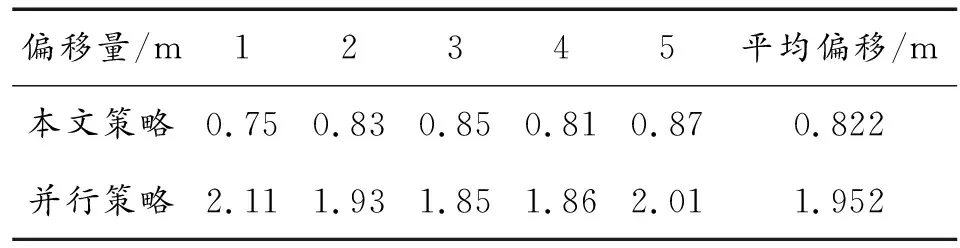
表2 橫移運(yùn)動(dòng)試驗(yàn)統(tǒng)計(jì)結(jié)果Table 2 Statistical results of transverse motion test
3) 中心轉(zhuǎn)向,原地3圈,結(jié)果如表3所示。中心轉(zhuǎn)向結(jié)果分析與直行結(jié)果分析過程相同,在此不做贅述。
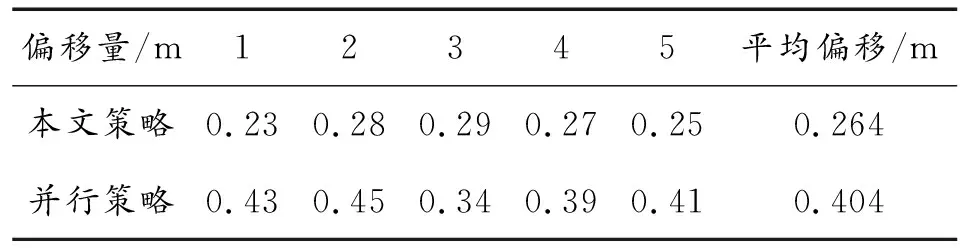
表3 中心轉(zhuǎn)向運(yùn)動(dòng)試驗(yàn)統(tǒng)計(jì)結(jié)果Table 3 Statistical results of center steering motion test
4) 45°斜行,行駛10 m,結(jié)果如表4所示。同樣,由于車體對(duì)角線兩電機(jī)負(fù)載不同,本文的控制策略是在進(jìn)行斜行時(shí)對(duì)角線兩電機(jī)采用交叉耦合控制,相較于并行控制來(lái)說(shuō),對(duì)斜行運(yùn)動(dòng)的軌跡偏移情況也有所改善,大約提高34.7%。

表4 45°斜行運(yùn)動(dòng)試驗(yàn)統(tǒng)計(jì)結(jié)果Table 4 Statistical results of 45° oblique motion test
綜上,由實(shí)車試驗(yàn)結(jié)果可得,在應(yīng)用本文提出的變結(jié)構(gòu)耦合同步控制策略之后,全方位移動(dòng)叉車不僅能夠進(jìn)行直行、橫移以及中心轉(zhuǎn)向運(yùn)動(dòng),也能夠完成任意角度斜行,同時(shí)各運(yùn)動(dòng)方式軌跡偏移情況均有不同程度改善。
6 結(jié)論
本文針對(duì)全方位運(yùn)動(dòng)車輛在外界因素影響下因驅(qū)動(dòng)電機(jī)不同步導(dǎo)致其運(yùn)動(dòng)軌跡偏移這一問題,提出一種適合于全方位運(yùn)動(dòng)特點(diǎn)的變結(jié)構(gòu)耦合同步控制策略。利用建模仿真說(shuō)明了其結(jié)構(gòu)特點(diǎn),以自主設(shè)計(jì)的履帶式全方位移動(dòng)叉車進(jìn)行實(shí)車試驗(yàn),最終結(jié)果表明:本文提出的控制策略不僅能夠使全方位移動(dòng)車輛完成直行、橫移、中心轉(zhuǎn)向以及任意角度斜行等多種運(yùn)動(dòng)方式,也能夠改善因外界因素導(dǎo)致的軌跡偏移問題,這既保證了全方位車輛的運(yùn)動(dòng)靈活性,又提高了其運(yùn)動(dòng)的精準(zhǔn)性,同時(shí)針對(duì)這種特定運(yùn)動(dòng)方式而提出的變結(jié)構(gòu)耦合同步控制策略對(duì)其他應(yīng)用領(lǐng)域的多軸同步控制也具有一定的參考意義。
猜你喜歡
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
能源工程(2020年6期)2021-01-26 00:55:22
中華詩(shī)詞(2019年7期)2019-11-25 01:43:04
山東冶金(2019年3期)2019-07-10 00:54:04
模具制造(2019年3期)2019-06-06 02:10:54
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測(cè)與儀表(2016年20期)2016-04-11 11:38:24
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
