岸艦導彈“剎車+起豎”過程傳遞對準方法研究
2022-07-10 09:51:14呂衛民劉陵順張天琦
兵器裝備工程學報 2022年6期
李 根,呂衛民,劉陵順,張天琦
(1.海軍航空大學,山東 煙臺 264001;2.中國人民解放軍77120部隊,成都 621100)
1 引言
在未來的海上戰爭中,如果能先于敵人發現、先于敵人打擊,就能取得整個戰局的主動。岸艦導彈是一種以攻擊敵方水面艦艇為主要目標的制導武器,其一般部署在作戰一線的海岸或島礁,對實現迅速打擊和靈活機動的需求顯得尤為迫切。初始對準是慣性制導系統在開啟正式制導模式前所必須經歷的階段,是確定出導航系和載體系之間相對關系的過程。初始對準一般情況下可分類為靜基座與動基座等2種狀態,靜基座對準要求在靜止條件下,且對準時間一般較長,這難以適應越來越高的作戰要求。傳統車載岸艦導彈彈載慣導,初始對準在停車靜止狀態進行,為提高對準收斂速度和提升對準精確度,動基座對準中很多都使用傳遞對準,傳遞對準通常是將所安裝高精度主慣導的導航參數傳遞至子慣導系統。傳遞對準到現在為止已獲得了很多成果,另外在傳遞對準中,速度加姿態是應用較多且實現效果比較理想的匹配方式。
龍瑞針對車載導彈實現快速動基座對準的問題,研究了將高精度的主慣導安裝在車載導彈發射架,并利用導彈起豎達到主子慣導同步俯仰機動傳遞對準的方法,為車載導彈動基座對準提供了很好的思路。劉百奇為實現車載導彈應急發射,提出了基于卡爾曼濾波的導彈起豎過程彈載子慣導快速傳遞對準方法,并進行了相應試驗研究,證明了其所提起豎對準方法可滿足相應要求。而岸艦導彈起豎時間相對較短,其僅僅依靠導彈起豎過程實現對準相當困難。
本文擬提出一種結合導彈發射車機動特點以及發射前準備特點的岸艦導彈傳遞對準方案,該方案主要利用“剎車”、“起豎”2段機動過程,以保證足夠對準時間,并使用魯棒性很強的強跟蹤濾波,降低外部干擾對傳遞對準過程造成的影響。本方案能夠有效減少岸艦導彈發射之前的靜止準備時間,大大提高導彈系統的反應能力,對實現岸艦導彈快速打擊能力和提高生存能力均有重要意義。
2 “剎車+起豎”傳遞對準過程
本文在已有的研究基礎之上,提出將車載定位定向系統作為主慣導安裝在岸艦導彈發射架,安裝示意圖如圖1。利用車載岸艦導彈到達發射陣地前由運動狀態到剎車停穩過程與導彈起豎對準過程共同組成傳遞對準機動過程,能夠保證彈載子慣導有足夠對準時間,以達到理想對準精度。該對準方法伴隨在車載岸艦導彈正常發射前的必經環節,不受地理環境與機動線路制約,可極大節省導彈射前準備時間。
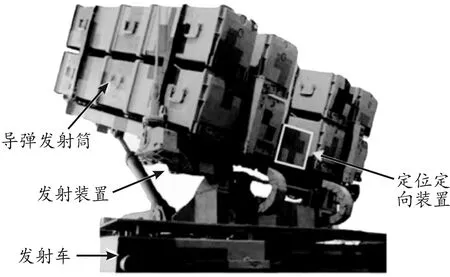
圖1 導彈安裝示意圖Fig.1 Missile installation composition diagram
“剎車+起豎”傳遞對準的主要流程為:彈載慣導上電初始化、發射車進入發射陣地前的機動及剎車至停止狀態傳遞對準、岸艦導彈起豎傳遞對準和姿態保持。其簡單過程如圖2所示,其中核心部分是在發射車機動及剎車減速至停止和導彈起豎2個過程。
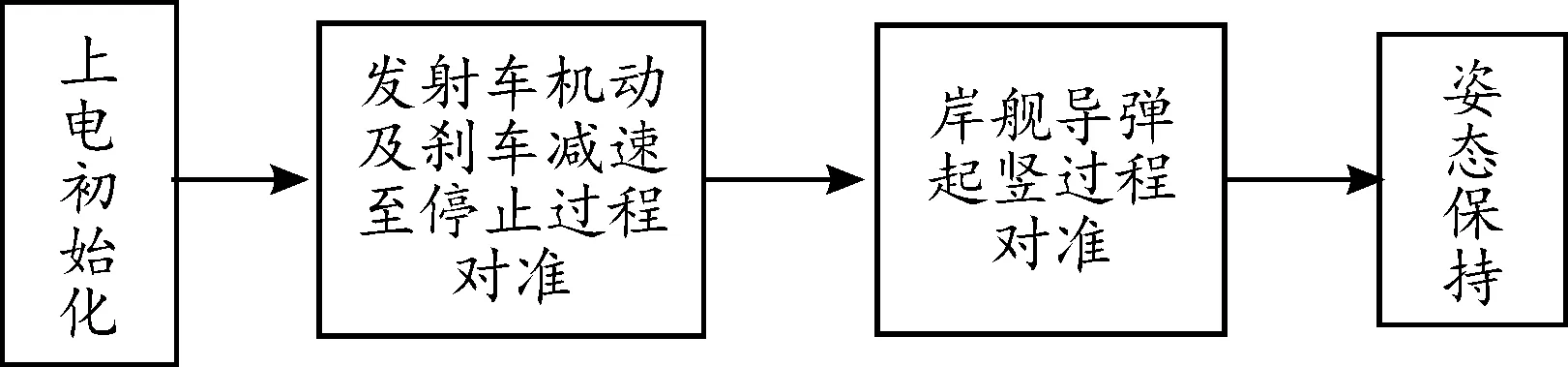
圖2 “剎車+起豎”傳遞對準流程框圖Fig.2 “Brake+erect” transfer alignment flow chart
發射車進入射前陣地前的機動及剎車至停止狀態過程。該段過程發射車快進入發射陣地時為調整車頭方向會進行低速運動,并且由于裝備特性發射車的剎車停穩不會使用緊急制動,而是采用緩慢剎車的方式,也就是進行剎車的加速度相對比較小。在此特點基礎之上,利用主子慣導速度、位置變化的過程進行傳遞對準,將岸艦導彈發射車的這段機動過程作為傳遞對準的第1階段。
岸艦導彈彈體的起豎采用液壓起豎,液壓起豎為一段平緩過程,也就是起豎導彈的角速度相對較小。不采取垂直起豎方式,即起豎幅度小于90°。起豎過程從導彈彈體與發射車同處水平狀態開始,彈體起豎到固定的角度后停止。利用主子慣導俯仰角發生緩慢變化的過程進行傳遞對準,將岸艦導彈發射前起豎的這段機動過程作為傳遞對準的第2階段。
3 傳遞對準模型
3.1 狀態方程
把地心慣性坐標系記作為系;把地球坐標系記作為系;以“東-北-天(E-N-U)”地理坐標系用作導航系,記作是系;彈載子慣導坐標系使用“右-前-上(R-F-U)”坐標系,記作為系;子慣導解算所得導航系記作′。設彈載子慣導平臺誤差角是(也就是′系相對系的旋轉角),那么的微分方程為:

(1)

岸艦導彈彈載子慣導速度誤差δ的微分方程為:

(2)



(3)
3.2 “速度+姿態”量測方程



(4)



(5)
其中:

(6)

(7)
式(6)中,是車載主慣導的姿態誤差角,看作白噪聲。此外設主子慣導間有誤差角?=++,這里是主慣導和子慣導間的安裝誤差角,是撓曲變形角,是白噪聲。則有:
(8)
把式(6)、式(7)和式(8)代入式(5),得到:




(9)
由式(9)可知,姿態匹配量測矩陣能夠表達為單位陣和反對稱陣相加的形式,也就是=+(×),姿態量測的向量取為:


(10)

由式(10)與式(4)可得量測方程為:

(11)
4 強跟蹤H∞濾波算法
4.1 常規H∞濾波算法
本文所建立模型把主子慣導間的撓曲變形看作是測量值的不確定干擾。濾波很適合處理這種具有不確定性的干擾信號和系統模型,在外部干擾情況下有很好的魯棒性。
建立線性時變離散系統為:

(12)
式(12)中:-1是系統的狀態變量;是量測的輸出;-1,、、、是方程對應的系數陣;、為能量有限的噪聲信號。
對于式(12)這樣的系統,濾波遞推方程式為:
(13)
式(13)中:是濾波反饋增益陣;是濾波目標函數的穩定性閾值;,為Riccati方程的解。
4.2 強跟蹤H∞濾波
強跟蹤濾波既有濾波模型結構簡單、魯棒性強的特點,同時又具備更好的跟蹤性能。
由式(13)可以看出,濾波同Kalman濾波有一定類似,當下濾波值都基于之前觀測量得到。隨時間推移,之前觀測量對當下濾波值影響提升,容易使得濾波誤差擴大。強跟蹤濾波算法可較好地解決這一問題。
上述遞推方程式中,加入漸消自適應因子,把預測協方差矩陣-1,的計算式調整為:
-1,=(()×-1,-1)-
(14)
強跟蹤Kalman濾波里,漸消因子表達式為:

(15)

()=()-()(-1)(-1)(-1)()-β()
(16)
()=()(-1,)(-1,-1)(-1,)()
(17)
式(16)~(17)中:(-1)為系統噪聲方差陣;()為量測噪聲方差陣;(-1,-1)是時刻點最優濾波值誤差的協方差矩陣;≥1是一個選中的弱化因子,使用這個弱化因子能夠讓狀態估計值變得更平滑;(-1,)為狀態向量轉移矩陣;(-1)為噪聲系數矩陣;()為量測系數矩陣;()為均方誤差陣。
由于濾波器不需要系統誤差統計特性,故不能得出陣。通過計算得到驗證,()(-1)(-1)(-1)()與均方誤差陣()及β()的值相比,小了幾個數量級,因此可將其近似忽略,將式(16)近似為:
()=()-β()
(18)
計算出殘差矩陣為:

(19)
計算出均方誤差陣為:
(20)
式(20)中, 0≤≤1為遺忘因子,一般取=095。

5 仿真結果和分析
5.1 仿真條件
仿真的初始位置設為緯度37.6°,經度121.5°,高度18 m,安裝誤差角取為=[0.3°,0.3°,0.3°]。主慣導的誤差參數通過對姿態誤差角、噪聲方差陣進行設置,即:=(1′)。
對子慣導的仿真參數進行設置。陀螺儀、加速度計的數據頻率均為200 Hz。陀螺儀的常值漂移為0.2(°)/h,隨機漂移為0.2(°)/h。加速度計的初始偏差取500μg,隨機偏差為500 μg。設置初值時刻的航向角30°,俯仰角0°,橫滾角0°,彈載子慣導姿態誤差初始值(0)=[-1.7°,1.8°,1.6°]。
設置0~20 s為發射車由勻速狀態剎車至停穩狀態對準過程,按10 m/s的速度勻速前進10 s,再按1 m/s的加速度減速到靜止停穩,減速時間也為10 s。20~50 s為岸艦導彈起豎過程,設置導彈以1(°)/s的角速度起豎,起豎幅度為30°。導彈起豎到位后,發射車和彈體均處在靜止狀態,進行姿態保持。
在此基礎上,分別用濾波和強跟蹤濾波處理,姿態誤差仿真曲線如圖3~圖5,傳遞對準姿態誤差失準角由表1給出。

圖3 俯仰角誤差仿真曲線Fig.3 Simulation diagram of pitch angle error
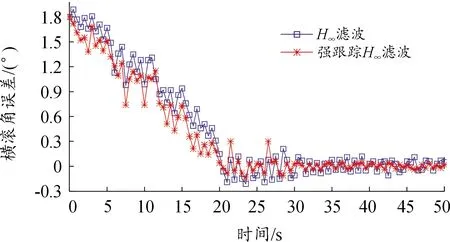
圖4 橫滾角誤差仿真曲線Fig.4 Simulation diagram of roll angle error
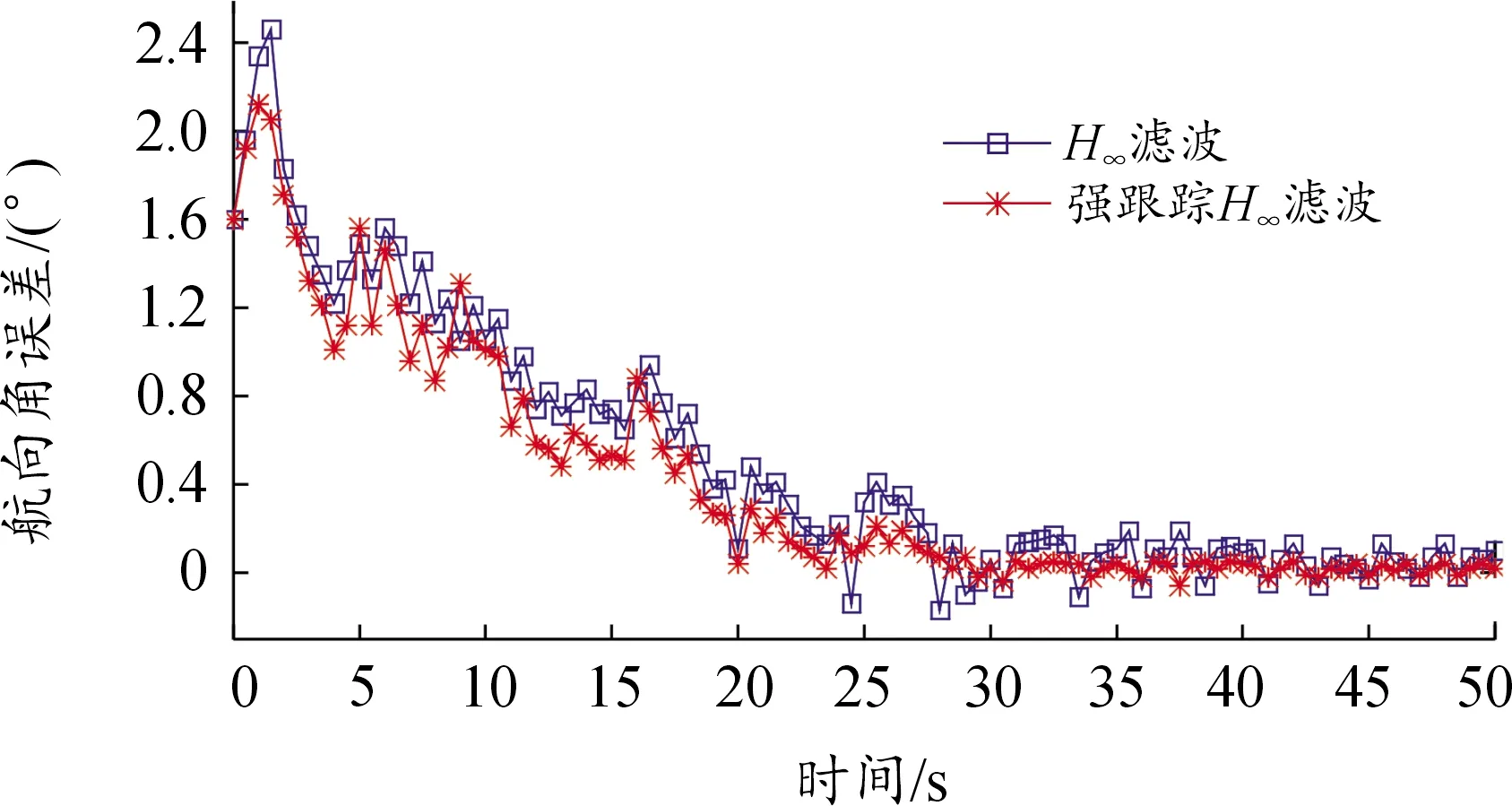
圖5 航向角誤差仿真曲線Fig.5 Simulation diagram of heading angle error
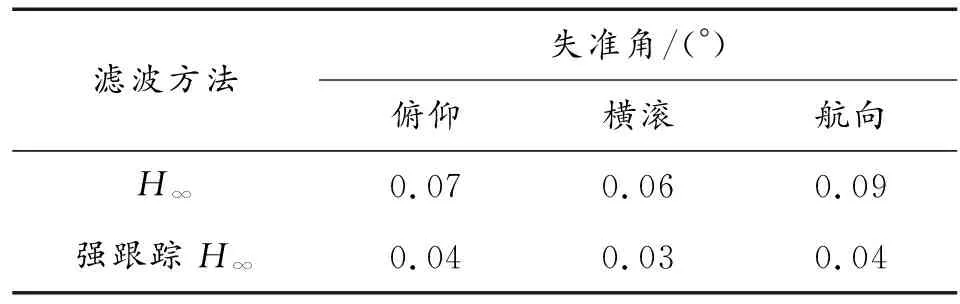
表1 傳遞對準姿態誤差統計Table 1 Transfer alignment error statistics
5.2 仿真結果與分析
由圖3~圖5可以看出,應用濾波與強跟蹤濾波方法均能使彈載慣導系統的姿態誤差得到更進一步的估計。在0~20 s的勻速、減速運動階段,濾波和強跟蹤濾波均能迅速將姿態誤差角減小至較小誤差,20~50 s的起豎運動階段,進一步提升了對準精度,并可以看出整個對準過程在40 s內已經達到了比較穩定的收斂。濾波方法與強跟蹤濾波方法收斂速度相當。
在精度方面,強跟蹤濾波方法俯仰和航向方向對準精度優于0.04°,橫滾方向對準精度大約是0.03°,濾波方法俯仰和橫滾對準精度大約為0.07°,航向方向對準精度優于0.09°,強跟蹤濾波方法對準精度較濾波方法更優。
仿真結果表明,在岸艦導彈傳遞對準中,強跟蹤濾波器在機動過程中不僅能保持濾波的優點,還能表現出比其更好的姿態跟蹤性能。
6 結論
為實現岸艦導彈快速發射,提出了把車載主慣導安裝在導彈發射架,利用岸艦導彈發射車“剎車”、“起豎”機動過程實現傳遞對準的方案。該方案伴隨在車載岸艦導彈正常發射前的必經過程實現,不受地理環境和機動線路的制約,可極大節省導彈射前準備時間。本文所提的基于強跟蹤濾波的“速度+姿態”動基座傳遞對準方法,可以較好地提高導彈對準的平穩性及精度,對于武器裝備研制具有重要的參考意義。
