麻省理工學院團隊設計改進新型““人造肌肉””材料可驅動微型飛行器實現長時間高精度飛行
2022-06-17 23:18:19
海外星云
2022年11期
關鍵詞:工藝
相關論文以《一種由低壓長壽命介電彈性體致動器驅動的高升程微型空中機器人》為題發表,并被選為該期刊的封面文章。
介電彈性體致動器能夠基于電場驅動直接把電能轉化成機械能,用于軟體機器人的“ 肌肉” 制作。不過,相較驅動剛性機器人的壓電雙晶片和電磁電機等剛性執行器,市面上大部分介電彈性體致動器的功率密度和壽命都較低,且需要較高的驅動電壓。
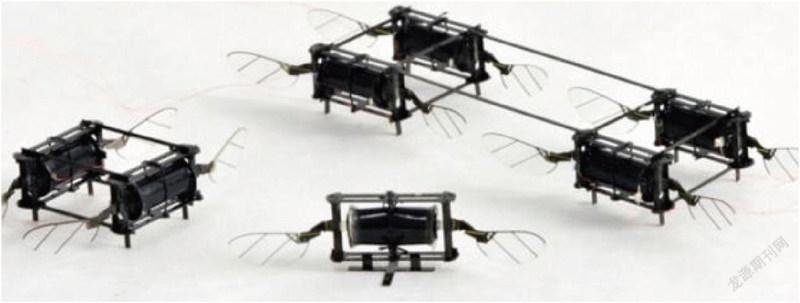
為此,來自麻省理工學院的研究團隊設計了一種“基于并聯多層電極材料技術、具有低驅動電壓、強耐久性”的新型介電彈性體致動器,不僅能夠提升微型飛行器的動力,而且使其各方面表現都優于當前同尺度下的其它飛行器。
據了解,集成該介電彈性體致動器的空中機器人在現有亞克級空中機器人中性能最好、飛行時間最長,其懸停時間達到20秒,位置和姿態誤差分別小于2.5厘米和2度,并實現了超過200萬次驅動循環的長使用壽命。
而且,該機器人在升力重量比方面也有所提升,從之前的2:1提升到了3.7:1,是目前同尺寸下能達到的最好性能。
論文第一作者任智健稱,之所以他們能達到這樣的突破,歸功于進一步降低了介電彈性體致動器每一層彈性聚合物的厚度。
此外,該團隊針對介電彈性體致動器驅動電壓較高的問題做出了努力。此前介電彈性體致動器需要達到接近2000V的工作電壓才能使機器人完成起飛,而他們最新研制的介電彈性體致動器只需要大約500V的工作電壓。……
登錄APP查看全文
猜你喜歡
中國特種設備安全(2022年5期)2022-08-26 09:19:32
礦產綜合利用(2020年1期)2020-07-24 08:50:40
山東冶金(2019年6期)2020-01-06 07:45:54
收藏界(2019年2期)2019-10-12 08:26:06
世界農藥(2019年2期)2019-07-13 05:55:12
世界農藥(2019年2期)2019-07-13 05:55:10
模具制造(2019年3期)2019-06-06 02:11:00
山東工業技術(2016年15期)2016-12-01 05:30:59
銅業工程(2015年4期)2015-12-29 02:48:39
新疆鋼鐵(2015年3期)2015-11-08 01:59:52