香蕉葉化身機器人?合成新型基于生物質微導管的微米機器人
2022-06-17 23:18:19
海外星云 2022年11期
關鍵詞:生物
香蕉葉成為科學家的“靈感繆斯”,研究成果有望用于癌細胞的精準捕殺和有機污染物的高效降解。
相關論文以《雙功能生物混合式磁驅動微米機器人》為題發表,第一作者是陳婷博士,通訊作者為華南師范大學化學學院董任峰副研究員、蔡躍鵬教授和華南理工大學任碧野教授。

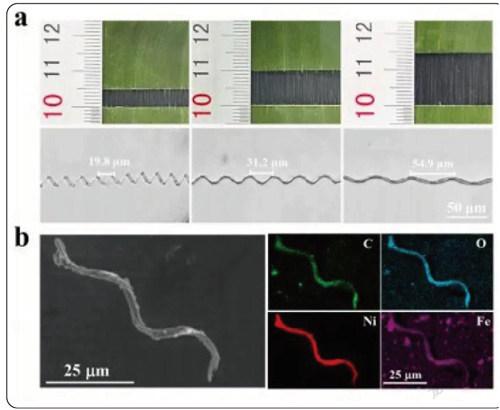
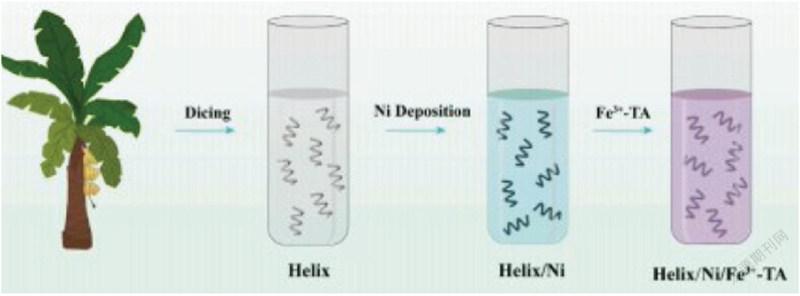
據了解, 在最初選材時, 該團隊既希望能夠既在功能上做到集成, 又對原材料的成本進行控制,且對結構和性能有一定要求。經過調研, 他們將從香蕉葉中分離出的螺旋狀微導管選作生物模板用于構建磁驅動微米機器人的主體。

董任峰博士介紹說,之前將生物質結構賦予磁性對于設備的要求比較高,需要在真空環境下去完成,很難實現批量生產;有一些生物質甚至會在真空環境下,由于其中的水分迅速抽干,而導致其結構坍塌。因此,他們一改傳統物理方法,而使用化學鍍法。這樣只需將提取的生物模板,在室溫下泡到對應的化學溶液中,即可得到既具有較好的磁性又保留生物模板原始結構的磁驅動微米機器人。
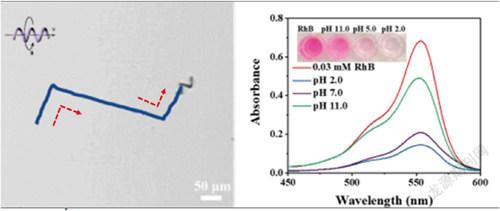
關于該研究潛在的應用場景,董任峰博士表示,之前的微納米機器人通常只具備一種應用潛力,而他們所研發的基于生物模板的磁驅動微米機器人集成了生物醫用和環境治理兩方面的應用。該磁驅動微米機器人具有制造簡單、成本經濟、高效推進等多種優異的特性,在環境和生物應用方面展現出較好的應用前景。
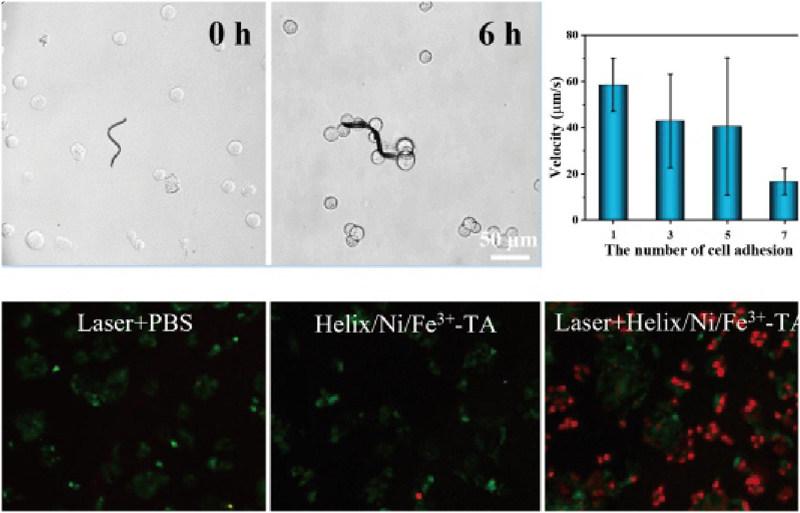
而在生物應用方面,該新型磁驅動微米機器人一方面通過其高度可控的運動性能可精準的靠近癌細胞,另一方面,由于該磁驅動微米機器人與癌細胞表面之間的特殊化學作用,令其可以精確捕獲癌細胞。此外,由于表面修飾的功能材料F e 3 + - T a具有較好的光熱作用,因此,在成功捕獲癌細胞后,可進一步在光照下產生熱量殺死這些癌細胞。該磁驅動微米機器人可實現對癌細胞精準靶向捕獲、可控路徑運輸、高效光熱殺傷一系列精細化操作,有望在未來生命體內進行微納米級別的精準診療。
董任峰博士談到,他們團隊還在光驅動微納米機器人方面做了很多工作,未來希望這種基于生物模板的新型磁驅動微米機器人既有磁驅動的特點,又有光驅動的優勢,以擴展到更多的應用場景。
總體而言,這項研究的亮點主要有兩方面。一方面,其選用的生物模板具有天然的優勢,后期人工修飾的材料具有可定向功能化的特點,從未來發展上看,將大自然中生物和人工材料相結合是大勢所趨; 另一方面,微納米機器人是當前的一種新興科技,具有極其廣闊的發展前景, 有望在生物探測、智能載藥、環境治理、微納米組裝等多個領域發光發熱,而此次的研究成果證實了微納米機器人也可實現多功能集成,這可能在微納米機器人領域成為一種新的趨勢。

下一步,該團隊將繼續深入展開微納米機器人應用方面的研究工作。董任峰提到,此次他們為微納米機器人提供的磁驅動方式屬于外場驅動型,之后會在外場驅動型微納米機器人的制備、運動優化及應用方面開展更多基礎性研究,尤其是在自然生物體與人工微納結構結合的生物雜交機器人方面將做進一步推進,例如將微生物、微藻、細胞等和精細的微納米結構相結合,希望能夠開發出既具備生物體本身天然優勢,又具備人工微納結構指定功能的智能化“ 生命體-微機械”結合型微納米機器人。
猜你喜歡
天天愛科學(2022年9期)2022-09-15 01:12:54
天天愛科學(2022年4期)2022-05-23 12:41:48
當代水產(2022年3期)2022-04-26 14:26:56
科學大眾(2021年9期)2021-07-16 07:02:54
軍事文摘(2020年20期)2020-11-28 11:42:50
航空世界(2020年10期)2020-01-19 14:36:20
小學科學(學生版)(2018年3期)2018-04-18 12:34:19
知識經濟·中國直銷(2017年10期)2017-11-07 02:39:52
知識經濟·中國直銷(2017年3期)2017-04-16 03:08:01
文學少年(有聲彩繪)(2017年2期)2017-03-06 08:10:54