基于車輛車載診斷數據的山地城市道路異常駕駛行為空間分布特征
2022-06-14 09:13:44王玉婷張夢歌彭博蔡曉禹榮曉楠
科學技術與工程 2022年13期
王玉婷, 張夢歌, 彭博*, 蔡曉禹, 榮曉楠
(1.山地城市交通系統與安全重慶市重點實驗室, 重慶400074; 2. 重慶交通大學交通運輸學院, 重慶 400074)
異常駕駛行為會導致車輛沖突加劇,現有交通安全風險研究大多是事故后的數理統計分析,難以準確刻畫事故發生前的交通運行狀態;并且目前大量的異常駕駛行為數據并未得到充分挖掘。目前國內外對駕駛行為的研究主要分為駕駛行為的影響因素、駕駛行為與道路交通安全關系等方面。
在駕駛行為影響因素方面,Shinar[1]以駕駛員特性(包括性別、年齡等),以及車上有無乘客、車輛類型、時間等作為影響因素,研究發現男性和年輕駕駛員比女性和年老駕駛員更易產生激進駕駛行為;高峰時間段駕駛人員產生激進駕駛行為的可能性更大。Lee等[2]利用車載傳感器研究識別潛在的激進駕駛行為。莊明科等[3]通過問卷調查方式采集數據分析產生攻擊性駕駛的駕駛員相關因素,發現A型人格的駕駛員更容易產生攻擊性駕駛,在駕駛過程中,駕駛員的態度、技術對車輛的熟悉程度會不同程度地影響風險駕駛行為,駕駛技術越好、對車輛越熟悉的駕駛員可能出現風險駕駛行為的頻數會更高;Satoshi等[4]分析駕駛時間與駕駛行為之間的關系,認為連續駕駛導致的疲勞駕駛將影響車輛制動時速度下降量和減速距離。國內外學者利用模擬駕駛實驗方法獲得駕駛員不同狀態下的異常駕駛行為數據,研究了疲勞駕駛[5-6]、負面情緒駕駛[7-9]等。
在駕駛行為與道路安全關系方面,蔡曉禹等[10]基于車輛車載診斷(on-board diagnostics,OBD)駕駛行為數據及信息熵理論,提出了城市道路交通安全風險預估方法,并建立了風險等級閾值計算方法。徐進等[11]根據駕駛員制動行為與車輛表現出的航向角和車速等信息之間的關系,分析駕駛員制動行為對安全性影響,研究表明,車輛行駛方向的穩定性與制動力度具有顯著影響,而與駕駛員動作時間影響很小。李英帥等[12]、周穎等[13]通過分析信號交叉口車輛換道過程行為指標與道路安全風險性之間的關系,認為縱向速度、車輛間距、駕駛傾向3個因素與車輛發生沖突風險之間具有顯著影響性。關于異常駕駛行為與交通安全事故的關聯性相關研究表明:同一條道路上不同路段的異常駕駛行為率隨交通事故數的增加而增加,其變化趨勢基本一致[14-15]。因此,異常駕駛行為率可以表征道路交通安全狀態。
國內外對于駕駛行為的研究較多,分析現狀駕駛行為數據研究成果,主要有以下特點:一是研究成果主要以駕駛員心理、生理等角度分析駕駛行為,建立模型分析多個道路條件與異常駕駛行為的關系相關研究成果較少;二是大多數駕駛行為數據通過模擬實驗或實際操作實驗獲取,數據量有限。
2014年以來,基于車輛的車載診斷(OBD)的數據采集技術和設備得到了發展[16-17],目前在研究小汽車出行行為特征[17]、駕駛行為[18-20]、車輛道路排放[21]、事故率預測[22]等方面得到了廣泛的應用。現以車聯網OBD異常駕駛行為數據為基礎,選取道路坡度、彎度、公交站和開口為影響因素,以重慶市主城區6條主干路為研究對象,建立急加速、急減速、急轉彎和超速行為空間分布規律模型。
1 數據準備
1.1 OBD數據提取與處理
車輛OBD原始數據包含11種類型數據,在數據使用之前需根據研究內容在原始數據中提取可用數據。主要基于車輛全球定位系統(global positioning system,GPS)數據和駕駛行為數據兩種類型數據進行研究,因此,主要選取了重慶市6條主干道2018年5月16—21日的異常駕駛行為數據。
1.2 路段選取及類型劃分
為分析城市主干路道路的坡度、彎度、公交站和開口與異常駕駛行為之間的關聯性,依據車道數、中央分隔帶類型等道路條件不變原則,選取重慶市6條主干道,并劃分成不同類型的路段,如表1所示。
2 基于道路條件的異常駕駛行為影響因素分析
2.1 坡度的影響
根據相關研究成果,坡度與道路交通安全、車輛異常駕駛行為關系密切[23-24],主要分析坡度與異常駕駛行為率的聯系。
由圖1可得,異常駕駛行為中急減速占比最高,平坦路段發生頻率高于陡坡路段。相對于陡坡路段,駕駛員更容易在平坦路段處放松警惕,因此更容易產生緊急剎車、急減速行為。
2.2 彎度的影響
山地城市道路中通常會有轉彎半徑較小的路段,急轉彎等異常駕駛行為常有發生,但急加速、急減速以及超速等異常駕駛行為在彎道處的發生頻率低于直線路段,直線路段、彎道路段內異常駕駛行為率如圖2所示。

表1 城市道路路段分類Table 1 Classification of urban road sections
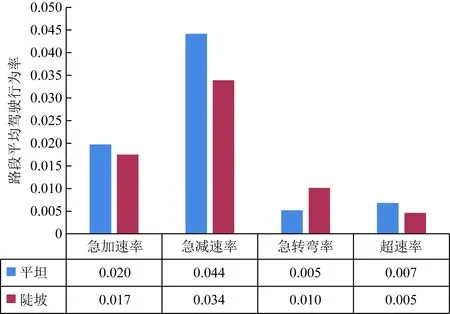
圖1 坡度與異常駕駛行為的關系Fig.1 Relationship between gradient and abnormal driving behavior
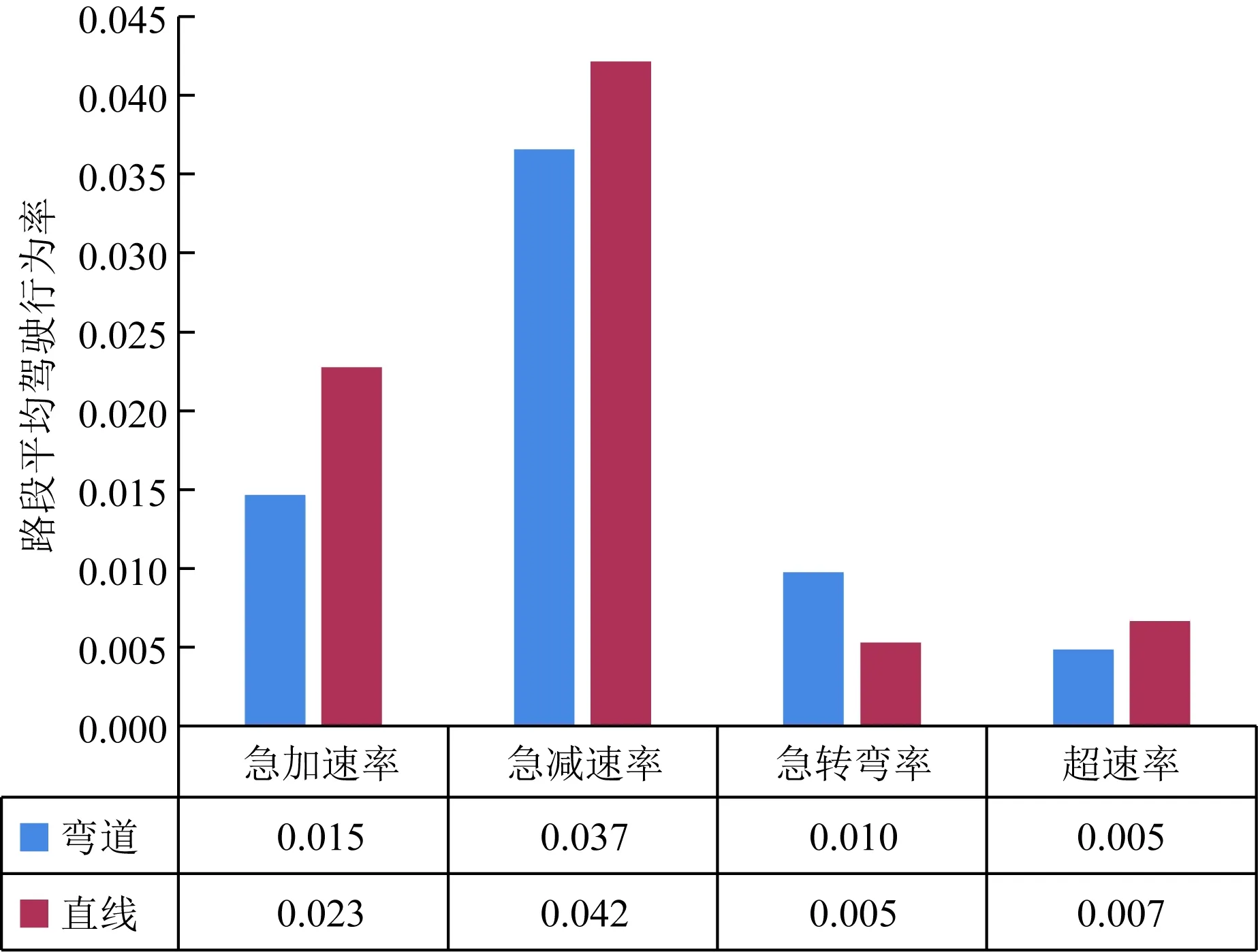
圖2 彎度與異常駕駛行為率的關系Fig.2 Relationship between curve and abnormal driving behavior rate
2.3 開口的影響
由圖3可知,有信控開口路段的急加速和急減速頻率最高,信控開口對急加速、急減速行為的影響較大;此外,開口對急轉彎頻率影響較小;對超速行為的發生無顯著影響。
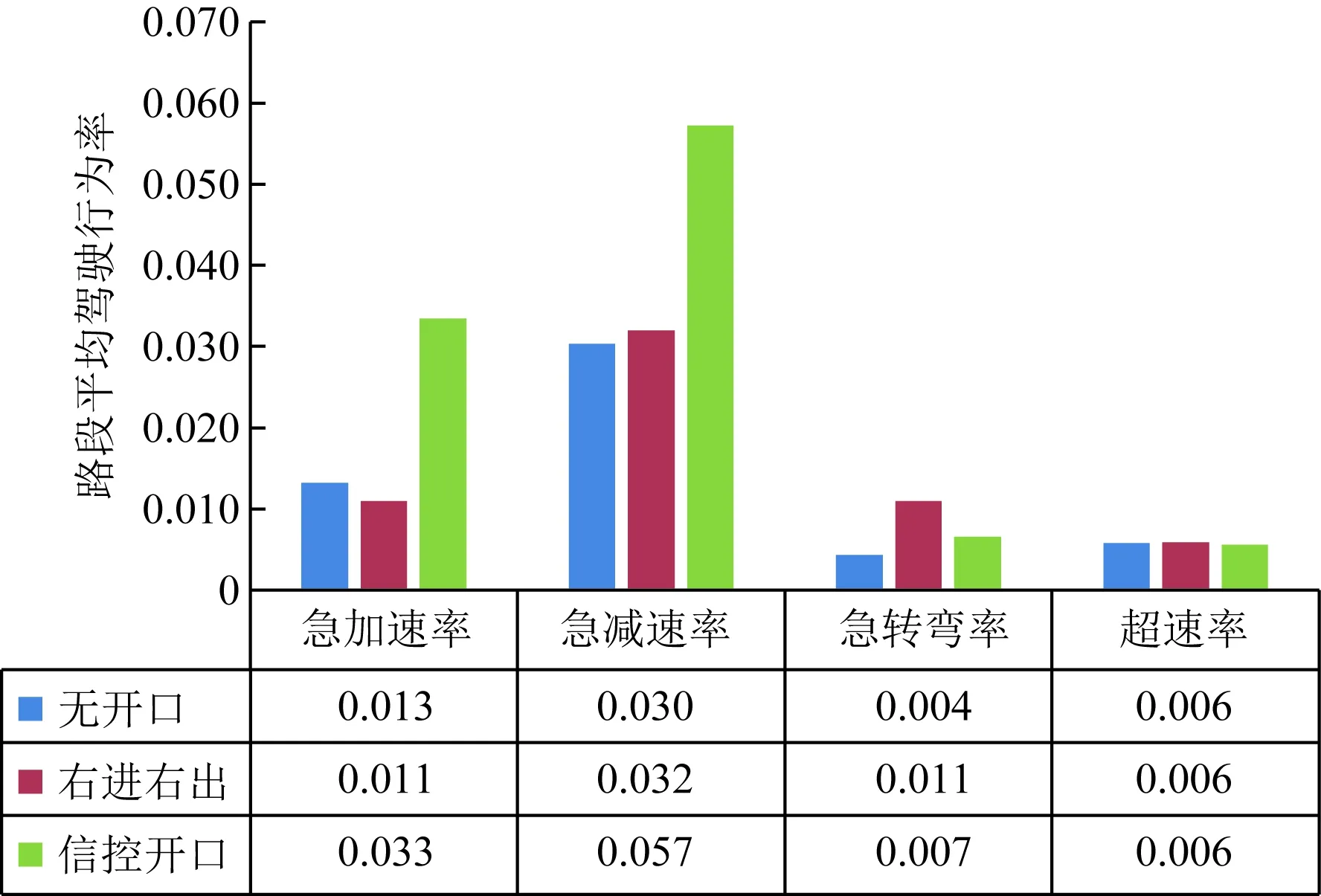
圖3 開口對異常駕駛行為頻率的關系Fig.3 The relationship between opening and frequency of abnormal driving behavior
2.4 公交站的影響
駕駛員在通過公交站路段時,對道路安全風險感知的程度不同,采取的駕駛行為措施也不同,公交站的布設對駕駛行為有一定影響。
由圖4可知,公交站的布設對急加速、急減速、急轉彎行為的影響較為明顯,對超速行為影響不大。

圖4 公交站對異常駕駛行為率的影響Fig.4 Effect of bus station on abnormal driving behavior rate
3 異常駕駛行為空間分析模型
異常駕駛行為的空間分布特征需利用合適的數學模型進行描述,經擬合檢驗,泊松回歸模型可用于描述單位容積內某事件發生的頻數分布,零膨脹回歸模型可刻畫樣本數據具有“零值過多”,且服從某種離散分布的計數因變量隨自變量變化而變化的關系模型。因此,擬基于這兩類模型展開研究。
3.1 泊松回歸模型
Possion回歸模型常常用于分析服從Possion分布的某事件發生次數(頻率)與其解釋變量之間的關系。
回歸系數β的估計值通常用牛頓-拉夫森(Newton-Raphson)迭代法進行估計,實際應用中,通常使用統計軟件編程實現。
3.2 零膨脹回歸模型
在實際的數據統計計數過程中,基本上都是非負整數,頻率分布范圍為0~1,但不可否認的是,很多現象存在計數為0的情況,即該事件在統計時間段內沒有發生,如事故發生次數、火災發生次數等。
零膨脹回歸模型的基本思想為:將事件計數(頻率)分為兩部分,一部分對應事件發生次數為0,該部分隨機變量取值為0,認為研究對象處于非風險狀態或低風險狀態;第二部分為事件發生次數不為0,該部分隨機變量取值為事件發生次數(頻率),在某種解釋變量影響下,事件發生次數服從泊松分布或負二項分布等。零膨脹回歸可認為是零值及一個服從泊松分布或負二項分布等某個離散分布的數據集的混合分布。
3.3 變量說明及駕駛行為頻率統計
3.3.1 變量說明
定量變量直接通過數據表示,定性變量需量化表示,如表2所示。
3.3.2 駕駛行為頻率描述統計
根據所選路段急加速、急減速、急轉彎和超速行為的連續6 d數據,利用SPSS對異常駕駛行為發生次數描述統計,如表3所示。
由表3可知,急加速發生次數平均值為1.07次,標準差為1.21,方差為1.47,方差約等于均值;急減速發生次數平均值為2.81次,標準差為2.24,方差為5.03,方差同樣約等于均值,因此急加速、急減速行為發生次數沒有離散現象,均適宜采用Possion回歸模型。
急轉彎平均每天發生0次的路段占研究路段的71.65%,超速行為平均每天發生0次的路段占研究路段的62.99%,二者零出現的次數較多,因此認為急轉彎、超速頻率數據出現零膨脹現象,方差與均值相差不大,適宜采用零膨脹Possion回歸模型。
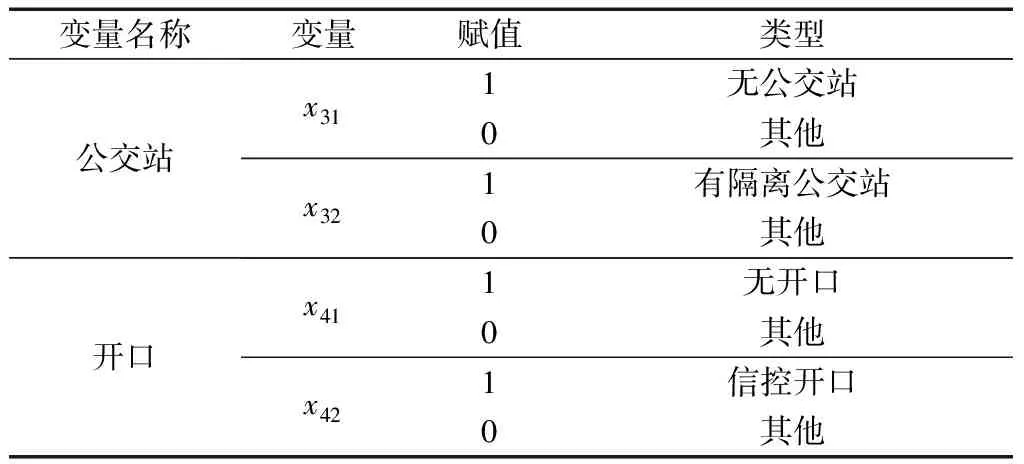
表2 變量說明Table 2 Variable declaration
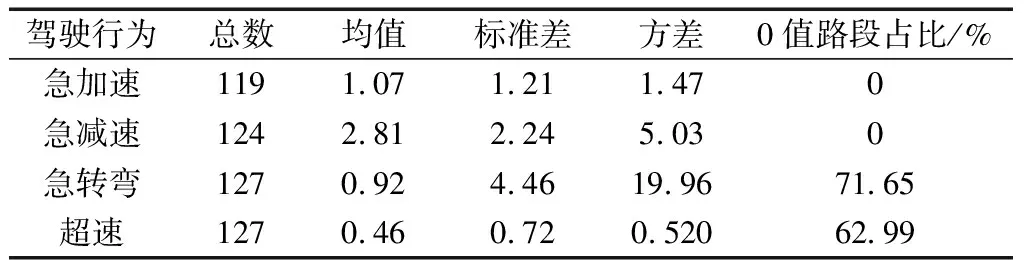
表3 異常駕駛行為描述統計Table 3 Abnormal driving behavior description statistics
3.4 模型分析結果
3.4.1 模型擬合優度
利用SAS9.2軟件中的genmod過程對樣本路段建立Possion回歸模型、負二項回歸模型和零膨脹模型,模型擬合優度結果如表4所示。
由表4可以看出,急加速率、急減速率中Possion回歸模型的AIC、BIC指標均小于負二項回歸模型,認為采用Possion回歸模型較好;急加速率、急減速率偏差統計量的值與自由度的比值約等于1,且根據Pearsonχ2值與χ2臨界分布表可知,急加速率、急減速率觀測數據與泊松預測分布之間無顯著性差異,泊松回歸擬合度良好。
對于急轉彎頻率和超速率來說,零膨脹回歸模型的檢驗指標值SBC收斂于自由度為6的χ2分布,這兩類頻率分析的ZIP模型和ZINB模型的統計指標值對應χ2分布表中P<0.01,應拒絕原假設,認為樣本超速數據存在明顯的零膨脹現象,因此選擇零膨脹模型是合理的。
從急轉彎率的AIC指標來看,AICZIP>AICZINB,且急轉彎發生次數的方差值是均值的21倍,這兩種情況均表明ZINB回歸模型擬合程度優于ZIP回歸模型。
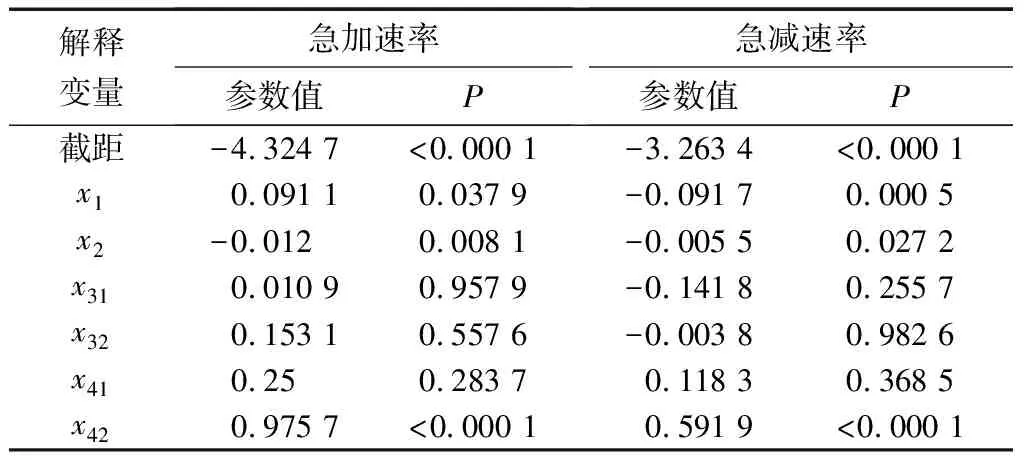
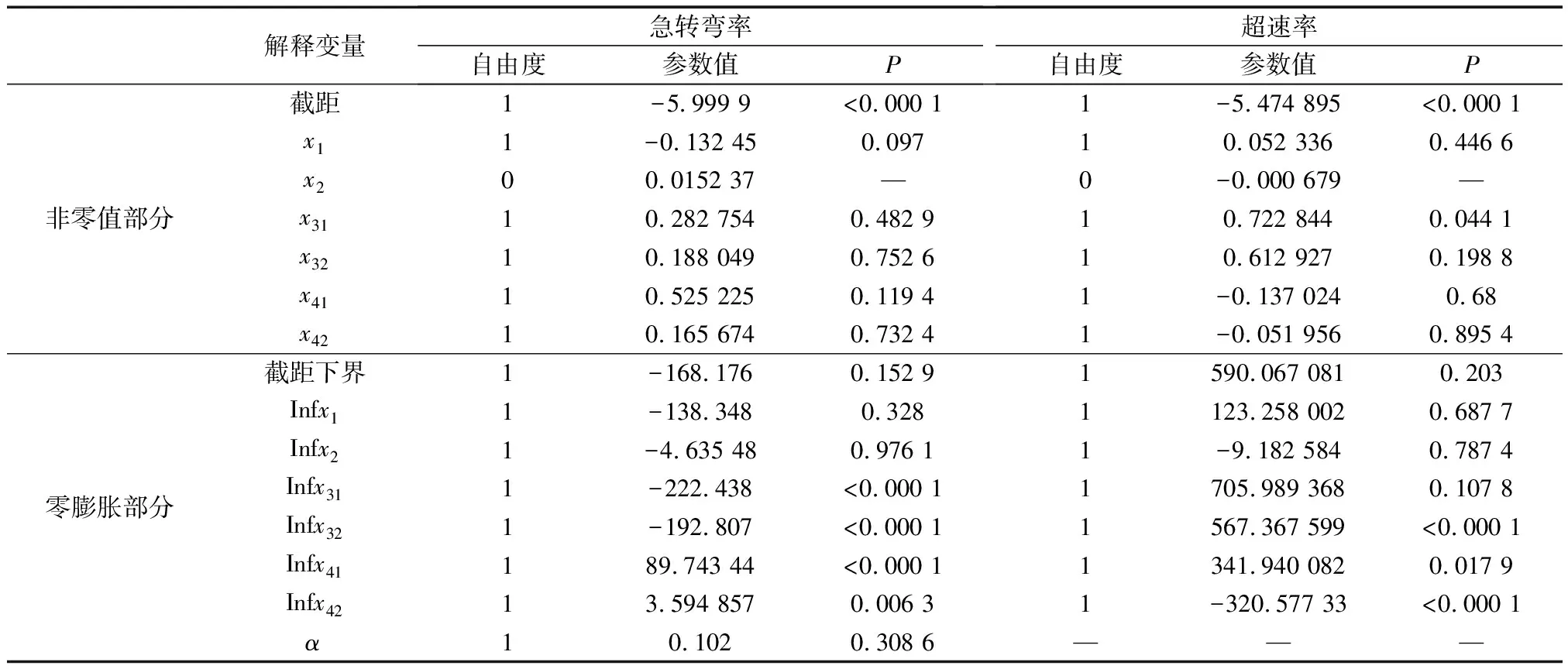
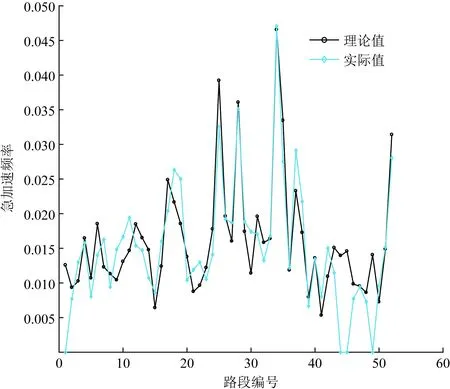
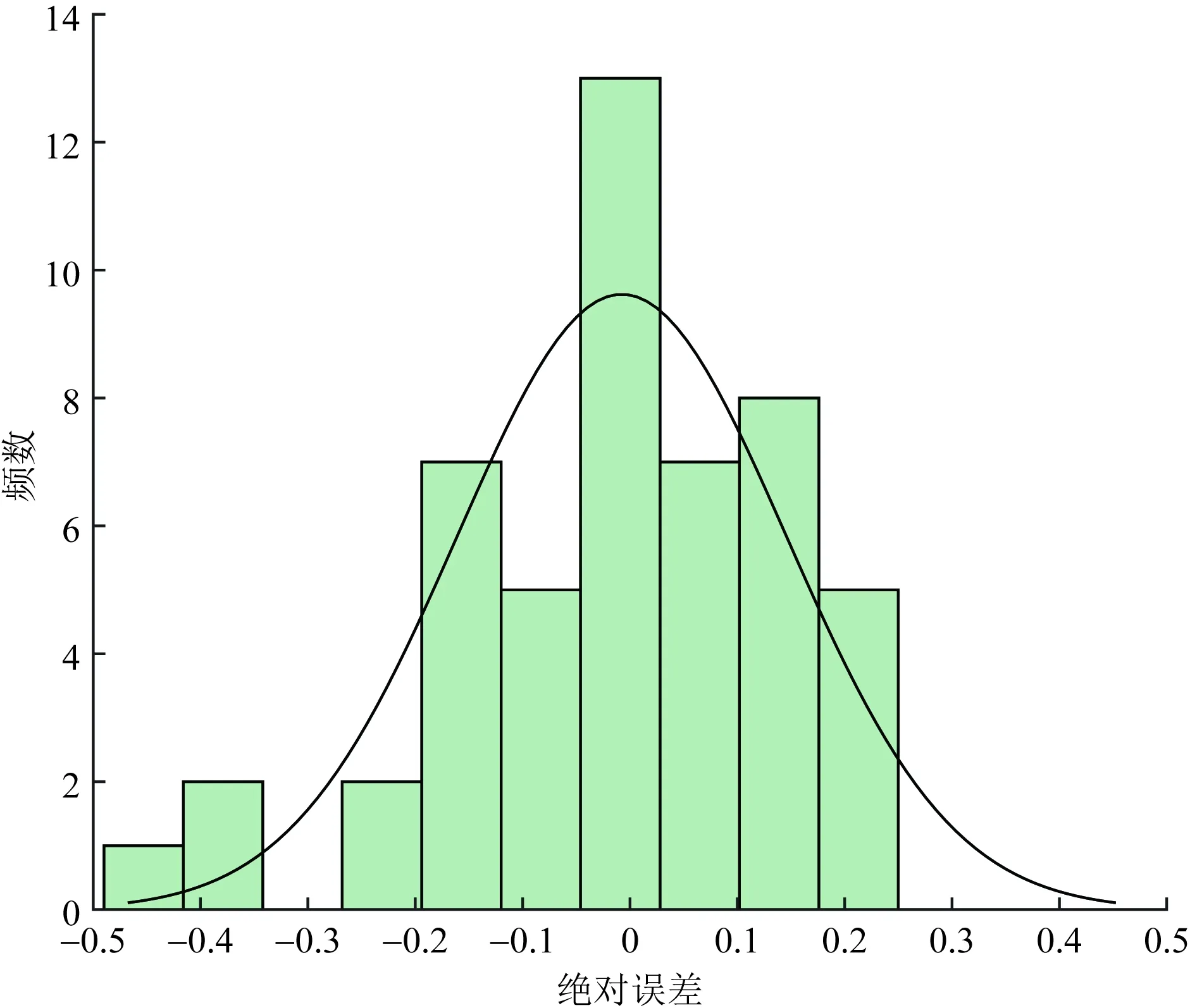
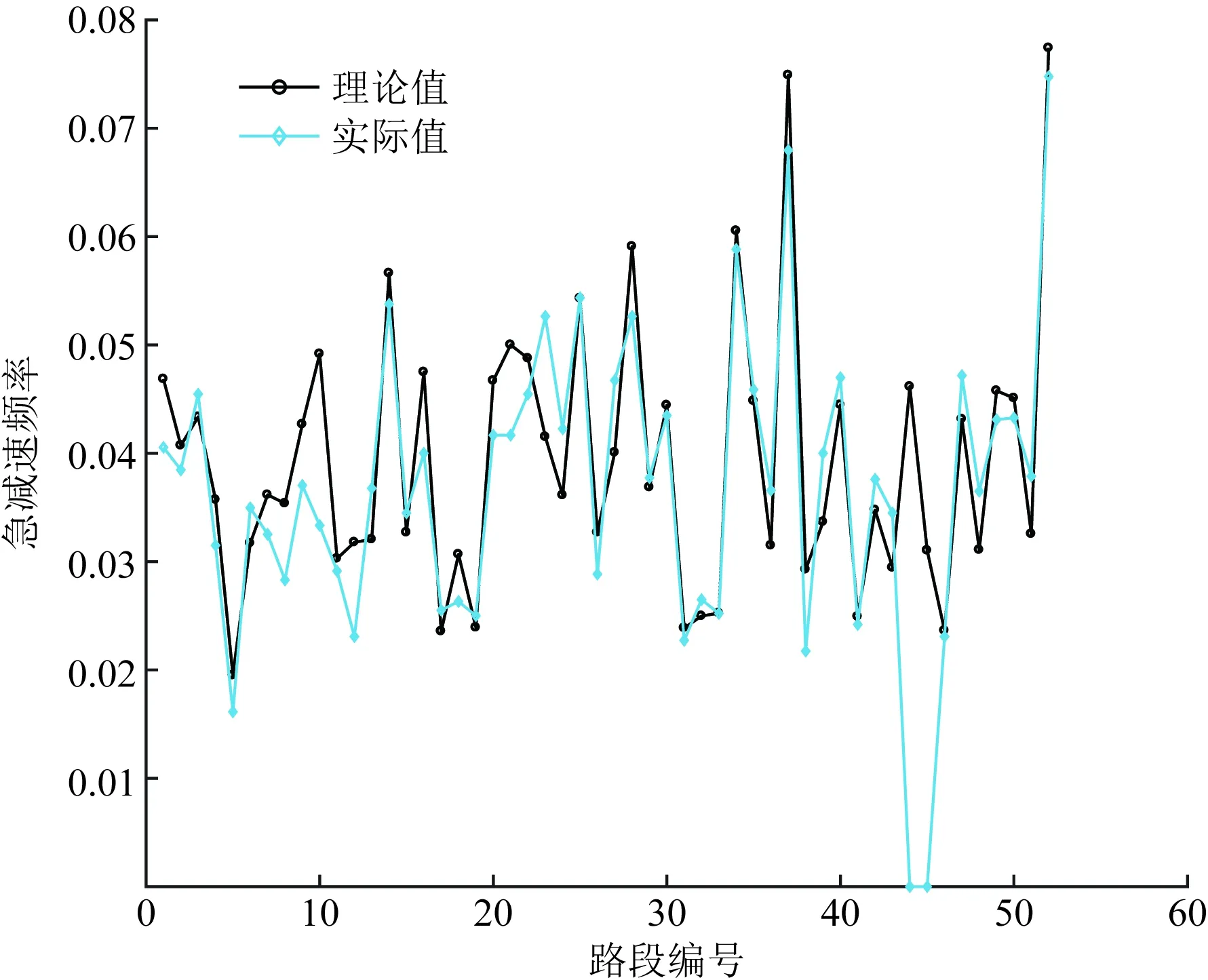
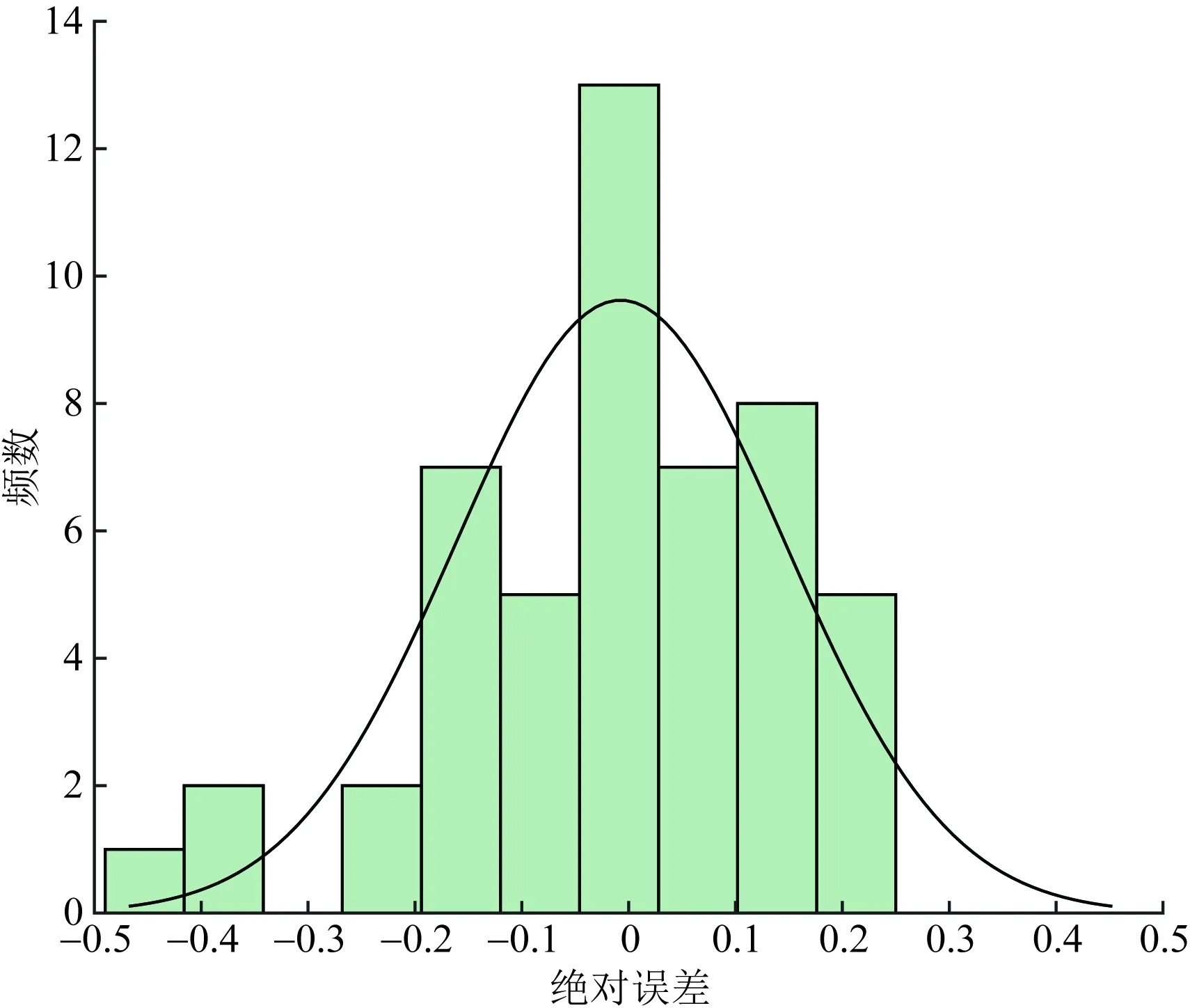
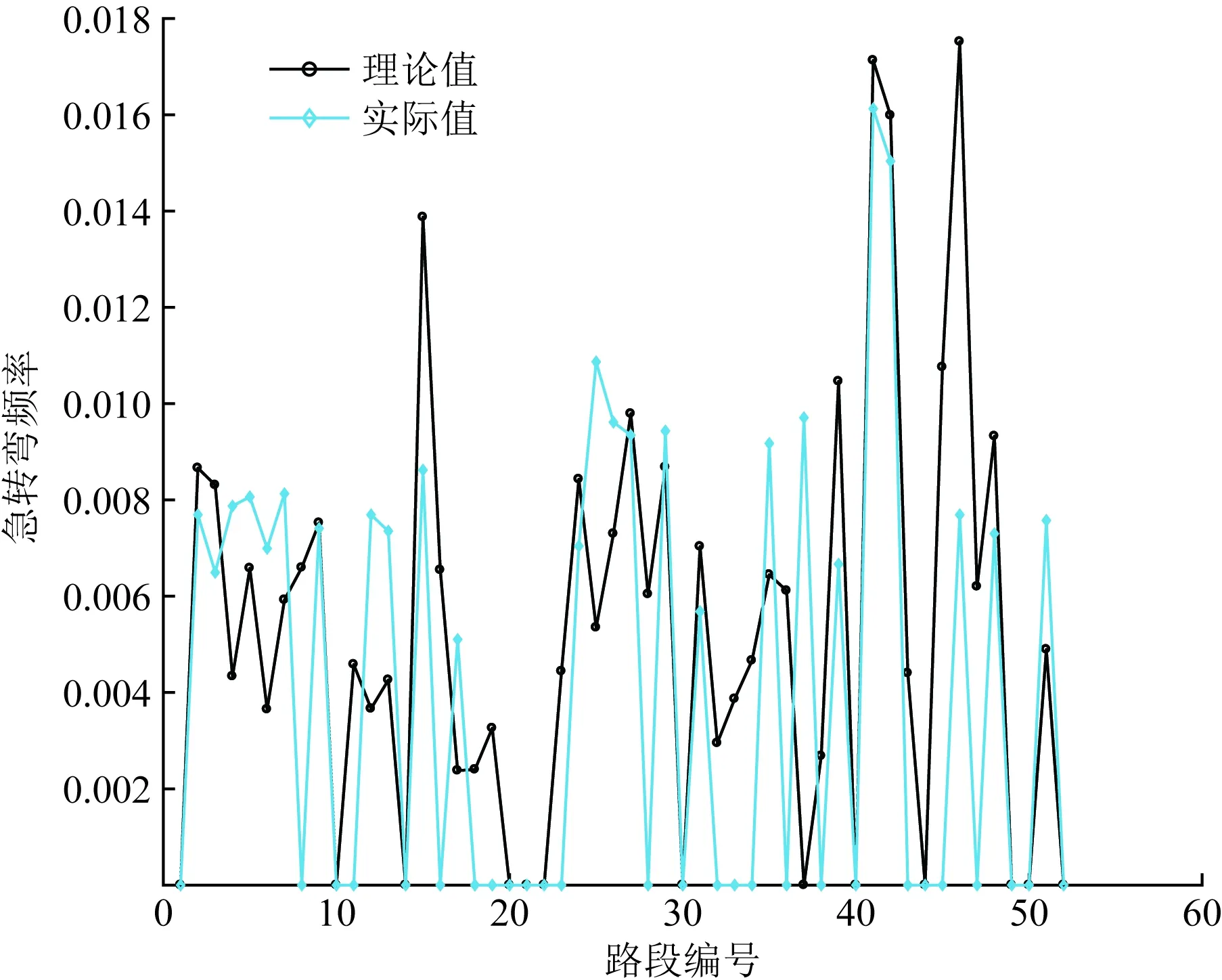
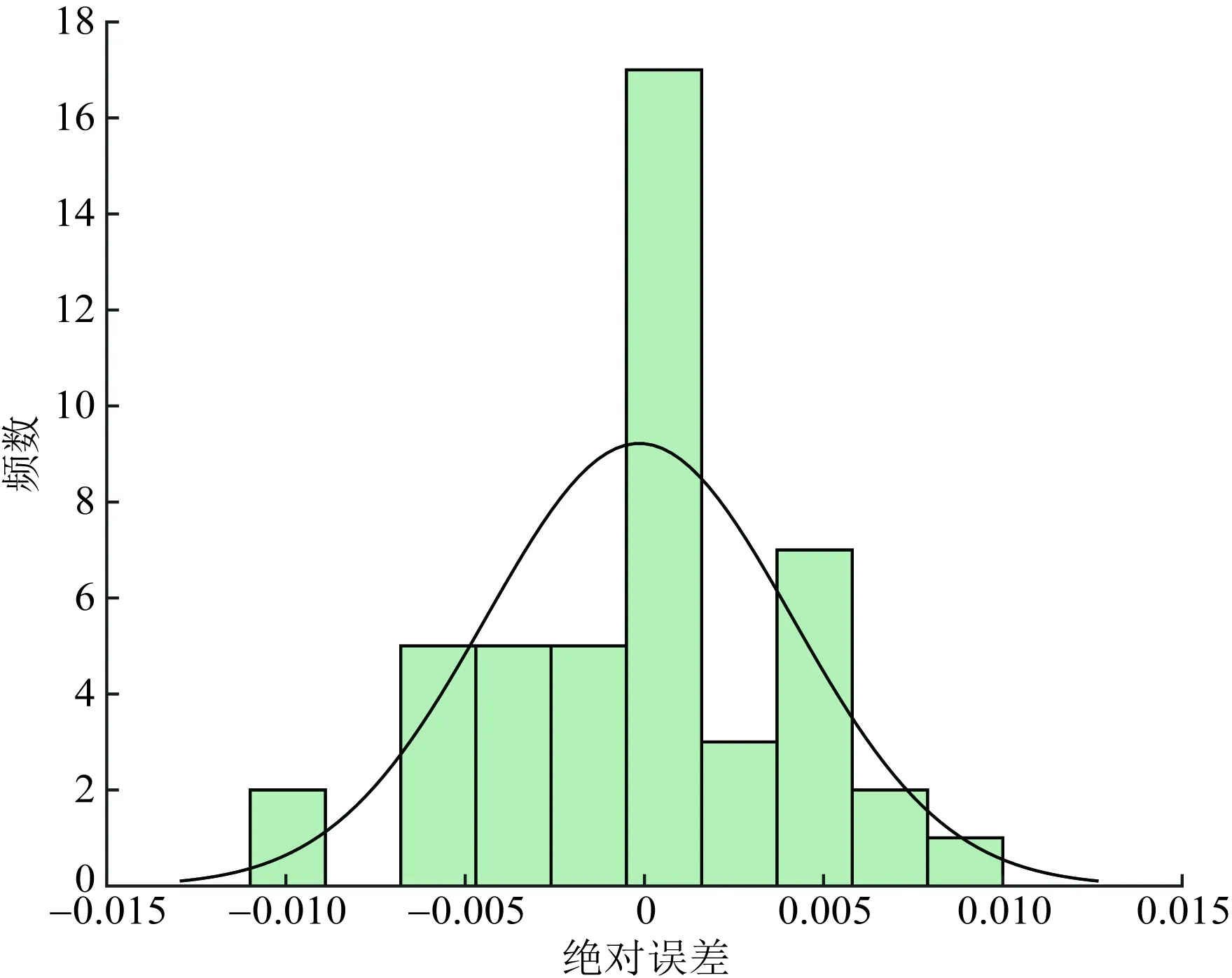
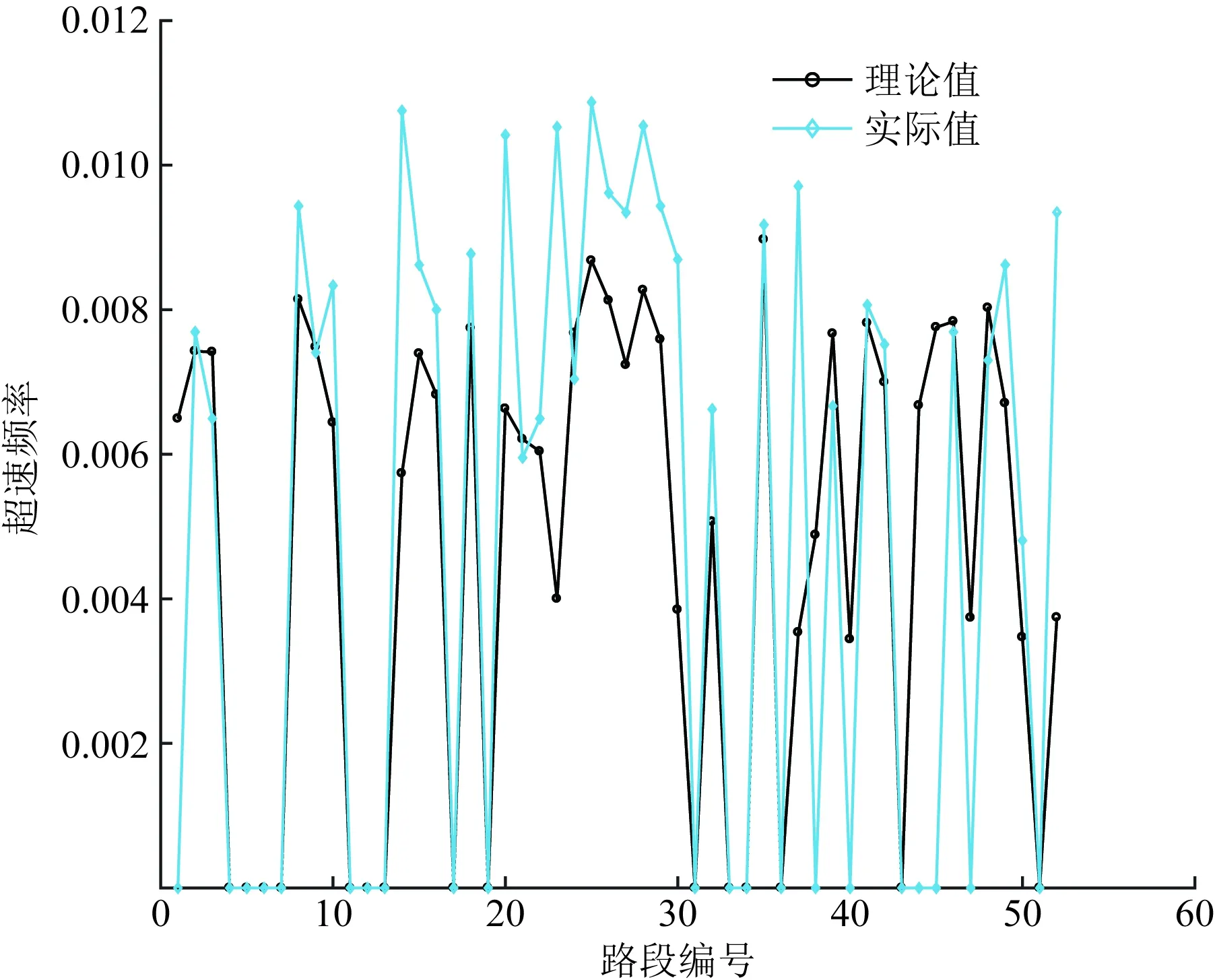
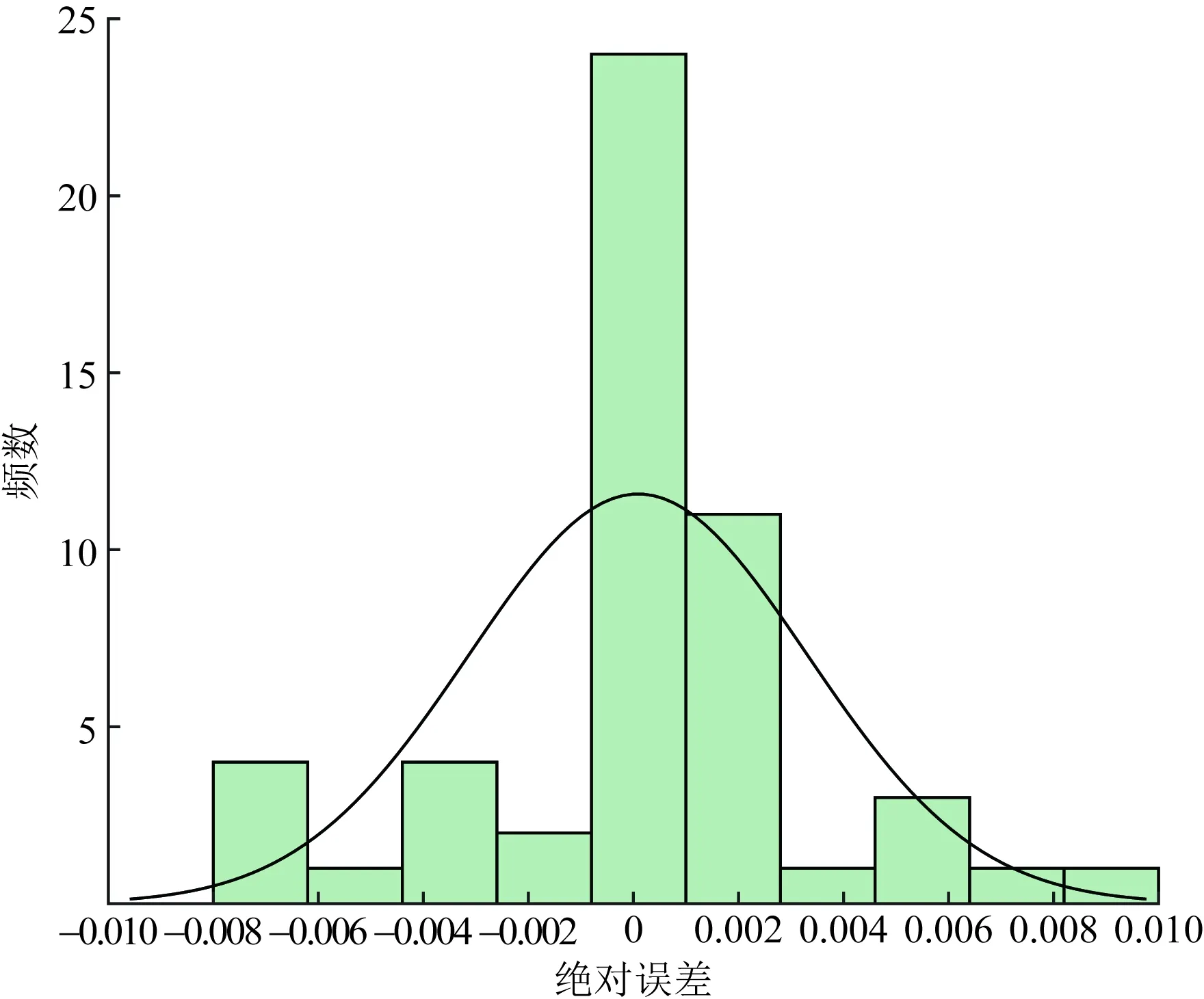
從超速率的AIC指標來看,AICZIP 3.4.2 模型參數估計分析 1)急加速、急減速率 利用Possion回歸模型參數估計迭代法,急加速率、急減速率回歸模型各解釋變量系數估計值如表5所示。 表4 模型擬合優度指標Table 4 Model goodness of fit index 表5 急加速率、急減速率模型參數估計Table 5 Parameter estimation of rapid acceleration rate and rapid deceleration rate model (1)開口類型(x42)中,急加速率、急減速率相應的P<0.000 1,說明開口類型(x42)與急加速頻率和急減速率影響均具有顯著性。開口類型參數估計為正值,說明開口類型與急加速頻率呈正相關性,信控開口路段發生急加速頻率或急減速率可能大于無開口或右進右出開口路段。 (2)坡度、偏角的統計量在95%檢驗下,坡度和偏角對急加速率、急減速率的影響具有顯著性。急加速率回歸模型坡度的參數值為正值,急減速率相應的參數值為負值,說明坡度與急加速率呈正相關性,與急減速率呈負相關性。偏角與急加速率、急減速率均為負相關性。 (3)公交站相關統計量在95%檢驗下的P>0.05,因此,公交站類型對急減速頻率的影響顯著性不強。 (4)急加速率(y1)、急減速率(y2)與道路條件因素的關系可通過Possion回歸模型描述,表達式為 y1=exp(-4.324 7+0.091 1x1-0.012x2+ 0.010 9x31+0.153 1x32+0.25x41+ 0.975 7x42) (1) y2=exp(-3.263 4-0.091 7x1-0.005 5x2- 0.141 8x31-0.003 8x32+0.118 3x41+ 0.591 9x42) (2) 2)急轉彎率、超速率 由于急轉彎率和超速率的統計結果中,超過60%以上的路段發生“0事件”,因此利用零膨脹回歸模型擬合急轉彎頻率和超速頻率,如表6所示。 零膨脹回歸模型的參數估計分為兩部分:非零值部分和零膨脹部分。非零值部分可以體現出哪些解釋變量與不發生急轉彎或超速行為有關,若P值小于或等于顯著性,說明該解釋變量對不發生異常駕駛行為有顯著影響。 (1)急轉彎頻率回歸模型中,散度系數α=0.102,聚集指數K=1/α=9.804>1,說明急轉彎發生頻率具有離散性。 (2)零膨脹部分。是否有公交站(x31)、公交站類型(x32)、是否有開口(x41)、開口類型(x42)這4個解釋變量對不發生急轉彎有顯著影響;同樣,公交站和開口相關解釋變量對不發生超速行為有顯著影響。 (3)非零值部分。坡度與急轉彎頻率呈負相關;偏角與急轉彎頻率呈正相關,偏角越大,急轉彎頻率越大;公交站、開口與急轉彎頻率呈正相關。同樣,坡度、公交站與超速頻率呈正相關;偏角、開口與超速頻率呈負相關性。 表6 急轉彎率、超速率模型參數估計Table 6 Parameter estimation of sharp turn rate and supervelocity model (4)急轉彎率(y3)與多個道路條件之間的關系的零膨脹部分和非零值部分的回歸模型表達式為 =-168.176-138.348x1- 4.635 48x2-222.438x31-192.807x32+ 89.743 44x41+3.594 857x42 (3) y3=exp(-5.999-0.132 45x1+0.015 237x2+ 0.282 754x31+0.188 049x32+ 0.525 225x41+0.165 674x42) (4) (5)超速率(y4)與多個道路條件的關系表達式為 =590.08+123.26x1- 9.18x2+705.99x31+567.37x32+ 341.9441-320.58x42 (5) y4=exp(-5.47+0.05x1+0.000 679x2+ 0.72x31+0.61x32-0.14x41-0.05x42) (6) 為驗證回歸模型擬合急加速頻率、急減速頻率、急轉彎頻率、超速頻率的準確程度,隨機選取與樣本道路車道數、道路等級等其他條件相同的3條城市主干路,共52個路段。每天分段提取共連續6 d的過車數、急加速、急減速、急轉彎、超速行為車輛數等數據,計算其異常駕駛行為率。 4.2.1 急加速率 利用急加速頻率回歸模型計算52個路段急加速行為頻率,計算結果與實際發生急加速頻率進行對比分析,急加速頻率理論值與實際值對比如圖5所示,急加速誤差率分布如圖6所示。 Possion回歸模型計算的理論急加速頻率與實際路段發生的急加速頻率趨勢大致相同。個別路段絕對誤差較大,主要分布在急加速頻率為0的路段,根據上述分析,急加速頻率為0的路段極少,因此,對模型整體擬合程度沒有影響。 根據誤差率分布圖,急加速頻率回歸模型誤差率基本分布在±20%附近,所有驗證路段急加速頻率誤差率分布在(-40%,40%)區間,且誤差率大于30%或小于-30%的路段較少。 綜上所述,急加速頻率回歸模型擬合程度較好,在一定誤差范圍內,能夠識別路段急加速頻率。 圖5 急加速頻率理論值與實際值對比示意圖Fig.5 Comparison diagram of theoretical value and actual value of rapid acceleration frequency 圖6 急加速誤差率分布圖Fig.6 Rapid acceleration error rate distribution 4.2.2 急減速率 利用急減速率回歸模型計算的理論急減速頻率與路段實際發生的急減速頻率對比,急減速頻率理論值與實際值對比如圖7所示,急減速誤差率分布如圖8所示。 Possion回歸模型計算的理論急減速頻率與實際路段發生的急減速頻率趨勢大致相同(圖8)。誤差率分布在±20%附近的頻數最大,誤差率在±20%之外頻數迅速下降,最大誤差率在-48%左右,且誤差率大于30%或小于-30%的路段極少。 急減速頻率Possion回歸模型擬合程度較好,在一定誤差范圍內,能夠識別路段急加速頻率。 圖7 急減速頻率理論值與實際值對比示意圖Fig.7 Comparison diagram of theoretical value and actual value of sharp deceleration frequency 圖8 急減速誤差率分布圖Fig.8 Rapid deceleration error rate distribution 4.2.3 急轉彎率 根據擬合的急轉彎頻率零膨脹負二項回歸模型計算驗證路段急轉彎頻率。首先,需利用模型零膨脹部分,結合道路條件判斷各分段不發生急轉彎行為的概率值。若不發生急轉彎行為的概率值接近1時,該分段不發生急轉彎行為的概率很大,可認為該分段急轉彎頻率等于0。最后,根據非零值部分公式計算各分段理論急轉彎頻率,并將本次模型計算的理論急轉彎頻率與實際平均每天發生急轉彎頻率對比分析,急轉彎頻率理論值與實際值對比如圖9所示,急轉彎誤差率分布如圖10所示。 由圖10可知,急轉彎頻率零膨脹負二項回歸模型的絕對誤差分布在(-0.005~0.005)的路段約占驗證路段數的80.77%,且絕對誤差分布在(-0.001~0)范圍內的頻率最大,絕對誤差最大為0.01但頻率較小。總體來看,急轉彎絕對誤差分布較好。 圖9 急轉彎頻率理論值與實際值對比示意圖Fig.9 Comparison diagram of theoretical value and actual value of sharp turn frequency 圖10 急轉彎頻率絕對誤差分布圖Fig.10 Absolute error distribution of sharp turn frequency 4.2.4 超速率 同急轉彎頻率回歸模型類似,超速頻率回歸模型也分為兩部分:零膨脹回歸模型部分、Possion回歸模型部分。超速頻率理論值與實際值對比如圖11所示,超速誤差率分布如圖12所示。 由圖12可知,超速頻率絕對誤差基本分布在(-0.002~0.002)區間,在此區間的路段數約占驗證路段總數的71.15%,其中,絕對誤差分布在(-0.001~0.001)區間的頻數最大。總體來看,超速頻率回歸模型較好。 主要研究多個道路條件因素對異常駕駛行為的影響,探究山地城市道路異常駕駛行為的空間分布特征,基于Possion回歸模型和零膨脹回歸模型理論,建立以道路坡度、彎度、公交站和開口為因變量的異常駕駛行為率回歸模型。主要結論如下。 圖11 超速頻率理論值與實際值對比示意圖Fig.11 Comparison diagram of theoretical value and actual value of overspeed frequency 圖12 超速頻率絕對誤差分布圖Fig.12 Absolute error distribution of overspeed frequency (1)急減速行為率在不同環境下均明顯大于急加速率、急轉彎率和超速率,超速率均最小;在平坦、直線和信控開口路段急加速率和急減速率大于其他類型路段;急轉彎行為一般發生在轉彎半徑較小的路段,與轉彎半徑關系緊密。 (2)根據模型擬合優度分析結果,急加速率、急減速率Possion回歸模型擬合度較好。 (3)急轉彎率、超速頻率適宜用零膨脹模型。急轉彎行為發生的頻率具有離散性,采用ZINB形式回歸模型最優;超速頻率計算采用ZIP模型效果最優。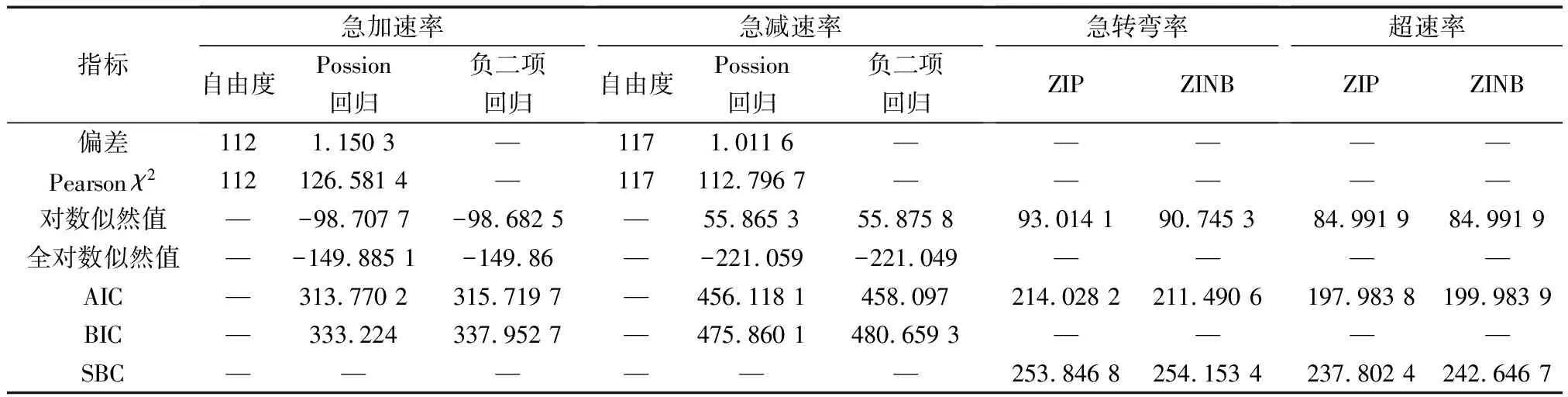
4 實例驗證
4.1 實例路段選取
4.2 空間分析模型可行性驗證
5 結論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
汽車實用技術(2022年4期)2022-03-07 06:07:20
當代陜西(2021年2期)2021-03-29 07:41:24
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
中國塑料(2016年3期)2016-06-15 20:30:00
公民與法治(2016年4期)2016-05-17 04:09:26