基于計算機視覺的電纜護套斷裂伸長率測量技術
2022-05-30 08:53:38牟少華李志強
中國新通信 2022年12期
牟少華 李志強
摘要:為解決電纜護套斷裂伸長率人工測量效率低的問題,設計了一套基于計算機視覺的電纜護套斷裂伸長率測量系統,并提出了一種電纜護套斷裂伸長率的自動化測量方案。首先在電纜護套表面的兩端分別繪制一種圓環標記符,然后使用攝像機拍攝護套在拉力裝置作用下的拉伸過程,利用邊緣檢測、連通域提取等圖像處理技術獲取電纜護套表面的標記符信息,并使用幀間差分法追蹤標記符,實時計算并保存標記符形心位置,并以兩個形心的間距作為標記符間距。本文提出了一種長度增量閾值判據,該判據夠精確判定護套斷裂所在幀,實驗表明,該方法能夠較為準確地測量出電纜護套的斷裂伸長率。
關鍵詞:斷裂伸長率;幀間差分法;運動目標檢測;電纜護套
一、引言
電纜護套是保護電纜內芯的重要材料,起到了維持內芯不受來自于外部的機械損害和化學腐蝕的保護作用,因此檢測電纜護套的各項質量參數顯得尤為重要。電纜護套的質量參數主要有最大拉力、拉伸應力、抗張強度和斷裂伸長率[1],這些質量參數都離不開電纜護套最大形變量的測量。目前,各個質量檢測公司對電纜各項參數的測量都主要通過人工測量的方式,存在效率低、測量結果受測量員主觀意識影響較大等缺陷,因此電纜護套斷裂伸長率自動化的測量方法顯得尤為重要。
電纜護套在實驗過程中呈漸進伸長的狀態,可利用運動目標檢測的方法追蹤護套完成測量任務。運動目標檢測的方法主要有幀間差分法、光流法和背景減除法。幀間差分法[3]是一種將連續的兩幀或者多幀圖像進行差分后,通過閾值法提取運動區域的運動追蹤法。該方法計算量小,有良好的實時性,但存在不能提取出完整運動目標的問題。袁益琴[7]等提出了一種將幀間差分法和背景差分法相結合的遙感衛星視頻的運動車輛檢測方法,有效地抑制移動的背景邊緣和殘留噪聲,提高了檢測質量。幀間差分法對運動速度較慢的目標檢測效果較差,且受環境噪聲影響較大,Bhattacharya[8]等通過累積幀間差分的方式有效提升了運動目標的檢測精度,并解決了目標對象在運動速度較慢時追蹤質量差的問題。Cao[9]等提出了一種基于局部聚類分割的對稱差分目標檢測算法,解決了在紅外航空視頻序列中相鄰幀間目標運動較小而導致追蹤效果較差的問題,較好地分割出了運動速度相對較慢的目標對象。
對于電纜護套斷裂伸長率的自動測量問題,高振斌[10]等提出了利用閾值分割求取標記點邊緣輪廓,并利用標記點重心間距求取護套斷裂伸長量的方法,有較高的測量精度,但未對護套斷裂的判定方法進行說明。陳俊松[11]等提出的基于改進L-K光流法的護套斷裂伸長率測量方案解決了護套斷裂瞬間的判定問題,但利用光流法追蹤特征點計算量大,速度較慢。本文采用幀間差分法追蹤電纜護套上的標記符,可有效減少計算量,提高檢測效率。提出了一種長度突變閾值判據,通過檢測護套標記符間距的突變精確判定護套斷裂瞬間,從而得到護套樣品的斷裂伸長率參數。該方法計算量小,效率高,可有效協助測量員完成測量任務。
二、基于計算機視覺的測量系統組成結構
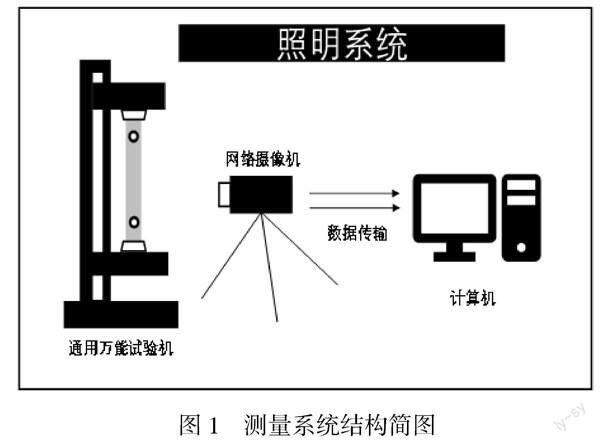
如圖1所示,本測量系統由通用萬能試驗機、網絡攝像機、計算機和照明系統組成。
通用萬能試驗機是一種可用于拉伸實驗的裝置,主要適用于試驗負荷高的各類金屬、非金屬和復合材料進行力學性能測試和分析研究,具有應力、位移、應變三種閉環控制方式,可求出斷裂伸長率、最大力、彎曲強度和彈性模量等參數。將待測的材料用試驗機夾具沿豎直方向夾緊后,內置的伺服電機驅動系統控制傳動橫梁向上運動,能夠基本保持以恒定的速度移動,并具有精準的加載速度和測力范圍。通過與之配套的操作軟件,可獲取拉力、長度等過程參數,通用萬能試驗機的實物圖如圖2所示。
照明系統用于為整個測量系統提供穩定的光源,以降低環境亮度變化對實驗造成的影響。在實驗開始時,使用試驗機夾具將電纜護套樣品豎直夾緊,實驗開始后,試驗機勻速緩慢拉伸電纜護套樣品。利用網絡攝像機拍攝實驗過程,并同步將拍攝數據傳輸至計算機,然后由計算機軟件實時計算護套標記符間距,并在檢測到電纜護套斷裂時,輸出斷裂伸長率。電纜護套樣品如圖3所示。
三、基于計算機視覺的測量系統軟件框架
本系統在Python 3.6環境下開發,并用OpenCV開源函數庫輔助完成。采用面向過程的軟件設計思路,將整個測量系統按功能劃分為四個模塊:圖像預處理模塊、追蹤模塊、斷裂判斷模塊和計算模塊。其中圖像預處理模塊的主要功能是圖像去噪和利用連通域提取等數字圖像處理技術獲取初始標記符的位置信息,并計算標記符初始間距;追蹤模塊主要利用幀間差分法在連續的圖像序列中檢測標記符的位置,并實時計算標記符間距;斷裂判斷模塊主要利用間距增量閾值判據準確判定電纜護套的斷裂時刻;計算模塊主要功能是整合各個過程參數,計算電纜護套斷裂伸長率。分別實現各模塊功能后拼接組成軟件系統,功能模塊化后的測量系統具有良好的錯誤定位能力,并降低了系統功能的耦合性,利于各組件的功能更新與刪改。測量流程圖如圖4所示。
首先通過網絡攝像機獲取包含電纜護套樣品的第一幀圖像,如圖5(a)所示,采用高斯濾波平滑圖像,然后對圖像進行二值化操作[12],得到圖5(b)所示圖像。進一步地,利用輪廓提取法[13]得到包含標記符在內的大量連通域。在攝像機與通用萬能試驗機距離約為1米的實驗環境下,單個標記符的像素面積大約為70個像素大小,因此通過面積閾值條件將像素面積小于50或者大于100的連通域濾除。然后利用標記符為圓環的特點,篩選出圓形度[15]大于0.8的連通域,即為目標標記符[11]。最后利用形心公式計算標記符的形心,如圖5(c)中紅點所示,并將其間距作為標記符的初始間距。
在電纜護套的拉伸過程中,采用幀間差分法對標記符進行追蹤。幀間差分法是將當前幀與前一幀圖像進行差分,再通過閾值條件獲取運動目標的方法,其原理可以表示為:
(1)
其中dk(x, y)為當前幀與前一幀差分的結果,fk(x, y)為當前幀,bk(x, y)為前一幀。閾值分割條件可表示為:
(2)
其中Rk(x, y)為二值化后的幀間差分圖像,T為根據實驗環境光亮設置的灰度閾值。幀間差分法原理簡單,計算量小,因此具有良好的快速性,能夠應用于實時檢測系統之中。同樣也存在一些缺點,其一,幀間差分法通過相鄰兩幀圖像作差的方式獲取運動目標,則需要實驗環境的背景固定,因此不能應用在攝像機運動的場景中;其二,當目標對象處于靜止或是運動速度較慢的狀態時,會出現跟蹤目標丟失的情況;其三,當運動目標表面存在大面積灰度值相同或相近區域時,對圖像進行差分處理會導致這些區域出現孔洞。
圖6為對某連續兩幀圖像使用幀間差分法的追蹤效果,其中圖6(a)為第n幀圖像,將第n+1幀圖像與第n幀圖像進行差分得到如圖6(b)所示結果,根據光照條件選取合適閾值(本文閾值設定為130)對圖6(b)進行二值化處理后得到如圖6(c)所示結果。由結果可看出,采用幀間差分法能夠準確地分割出運動的標記符。接著,根據分割出的標記符信息分別計算其形心位置,實時計算并保存兩個形心的間距,并將其作為標記符間距。
在拉伸過程,在每一幀圖像中計算標記符間距,并實時存儲。根據胡克定律,在彈性限度內,固體材料因受力產生的形變量與受力大小之間呈線性關系。結合多次實驗結果可以發現,護套樣品在穩定拉伸過程中,標記符間距呈現均勻增大的狀態,但在護套斷裂的瞬間,標記符間距將產生明顯突變。用某次實驗為例,以每一幀圖像中標記符的間距為縱坐標,與之對應的幀數為橫坐標繪制坐標圖如圖7所示。
由圖7可知,實驗開始前,標記符間距保持不變;實驗開始至電纜護套斷裂前,標記符間距均勻增大,曲線斜率基本不變;電纜護套斷裂瞬間,標記符間距增量突增,坐標圖斜率突變。通過以上特點,提出了一種長度增量閾值判據,其判定流程如圖8所示。
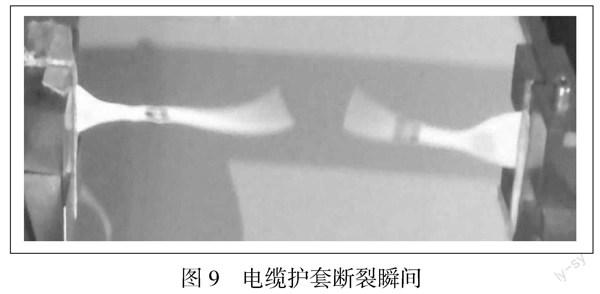
在檢測到標記符間距開始增大后,保存每一幀圖像中的標記符間距。與此同時,對其進行最小二乘法的直線擬合,具體過程為:利用最開始的兩點計算初始直線方程,每當有新的點增加,通過最小化誤差的平方和的方式修正直線方程的斜率和常數項,以尋找最佳的函數匹配。當擬合點的數量達到閾值后,對每一幀圖像中標記符間距增量進行判定,即計算當前點與擬合直線的距離,若該距離小于閾值,則實驗繼續;若該距離大于閾值,則標記符間距出現了突增,判定電纜護套斷裂,并通過標記符的初始間距和最大間距計算該樣品的斷裂伸長率。實驗表明,該判據能夠準確定位電纜護套的斷裂瞬間,如圖9所示。
四、實驗結果與分析
由當前國家標準[1],斷裂伸長率的定義為電纜護套在受拉力斷裂時的長度增加量與護套原始長度的比值,可表示為
(3)
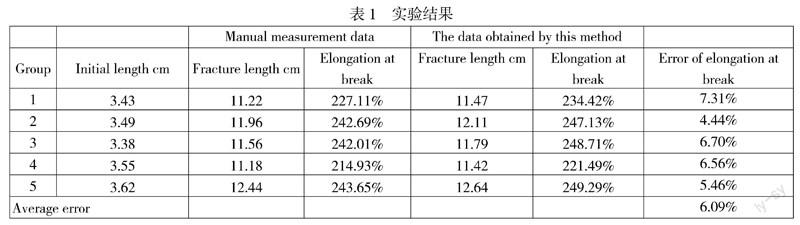
其中p為斷裂伸長率,Δl為電纜護套的伸長量,l為護套原始長度。在實驗中以標記符的初始間距作為電纜護套的原始長度,以電纜護套斷裂瞬間標記符的間距作為其最大長度。以測量員對5組電纜護套樣品的測量結果為參照,用本文提出的基于計算機視覺的自動測量方法得到的測量結果與之對比,得到如表1所示結果。
實驗結果表明,本文提出的方法所得結果與人工測量所得結果平均誤差為6.09%,能夠較好地完成測量任務。本方法的優勢在于一方面利用幀間差分法對運動的標記符進行追蹤,計算量小,擁有良好的實時性;另一方面提出的長度增量閾值判據能夠準確地判定電纜護套斷裂所在幀,避免了人工判定電纜護套斷裂時刻的主觀性和不穩定性,自動化的測量方案極大地提高了工作效率。
在實際生產生活中,電纜斷裂伸長率的測量主要是采用人工測量的方式,具體為實驗開始前在電纜護套兩端分別繪制標記符,測量并記錄標記符間距,并將其作為電纜護套的初始長度。在電纜護套的拉伸過程中,人工地判定斷裂瞬間,并測量電纜護套斷裂時標記符的間距。上述人工測量法在測量標記符的初始間距和最大間距時兩次引入了測量誤差,并且在測量標記符最大間距時,由于測量時間短,產生的測量誤差較大。另一方面,隨著操作人員的長時間工作,受反應速度下降的影響,電纜護套的斷裂瞬間判定的準確率也會隨之下降。本文方法采用基于數字圖像處理技術的方式對電纜護套拉伸前后標記符間距進行測量,測量精度和測量穩定性都高于人工測量的方式。同樣本文測量方法也存在一些不足之處,其一在于利用幀間差分法追蹤標記符,在標記符運動速度較慢的情況下,會出現標記符輪廓提取不完整的現象,從而影響標記符形心位置的計算,進一步造成標記符間距測量不準確,可通過改進幀間差分法的方式優化該問題;其二在于電纜護套斷裂時間的判定問題,采用本文方法獲取的電纜護套斷裂瞬間存在兩種情況:
1.電纜護套斷裂所在時刻恰好處于圖像序列的某一幀中;
2.電纜護套斷裂時刻處于圖像序列的兩幀之間。
其中第一種情況不會產生測量誤差,而當處于第二種情況時,假設電纜護套的斷裂時刻t處于第n幀和第n+1幀之間,可由式(4)表示為:
(4)
本文算法僅能在第n+1幀時,即在tn+1時刻,檢測出電纜護套斷裂,在電纜護套斷裂的真實時刻t到檢測出斷裂的tn+1這段時間內,標記符的移動距離可由式(5)表示為:
(5)
其中d為標記符移動距離,v為標記符移動速度。因此,該種情況會造成測量出標記符的最大間距大于其真實值,進一步會導致計算出的斷裂伸長率的值偏大。目前實驗采用幀率為30赫茲的網絡攝像機,當電纜護套的真實斷裂時刻恰好處于tn時刻的下一時刻,此時將產生情況2所引起的最大誤差,最大誤差可由式(6)表示為:
(6)
其中e為最大誤差,v為標記符移動速度,f為攝像機的幀率。由式(6)可知,選用幀率更高的攝像機能夠減弱這種情況造成的測量誤差。經過多次實驗得到標記符在世界坐標系下運動速度約為0.36cm/s,當攝像機幀率達到120赫茲時,最大誤差約為0.003cm/s,在工程意義下基本可認為該誤差不會對實驗結果產生明顯影響。
此外,在電纜護套的拉伸過程中,標記符會產生一定形變,從而對標記符間距的測量和計算帶來誤差。一方面,本文采用的利用兩個標記符形心的距離作為標記符間距的方式在一定程度上可以削弱上述情況造成的影響;另一方面,經過多次實驗發現當把標記符繪制于靠近電纜護套兩端的位置時,電纜護套拉伸過程標記符產生的形變量遠小于將標記符繪制于電纜護套中間區域時產生的形變量,因此利用標記符的繪制位置也可降低上述情況帶來的影響。
五、結束語
本文提出了一種基于計算機視覺的電纜護套斷裂伸長率測量方案,該方法實現了電纜護套斷裂伸長率的自動化測量,提出的長度增量閾值判據可精確地定位護套斷裂瞬間,解決了人工判定存在的主觀性和不穩定性的問題。該方法在穩定光源的實驗環境下,能夠高效地完成測量任務,具有較強的工程意義。
參? 考? 文? 獻
[1] GB/T2951. 11-2008, 電纜和光纜絕緣和護套材料通用實驗方法[S]. 北京: 中國標準出版社, 2008.
[2]張格悠, 龔俊, 陳俊松, 等. 基于雙目視覺的電纜護套斷裂伸長率自動測量[J]. 計算機輔助設計與圖形學學報, 2021, 33(11): 1668-1676.
[3] Kim C, Hwang J N. Fast and automatic video object segmentation and tracking for content-based applications[J]. IEEE Transactions on Circuits & Systems for Video Technology, 2002, 12(2): 122-129.
[4]屈晶晶, 辛云宏. 連續幀間差分與背景差分相融合的運動目標檢測方法[J]. 光子學報, 2014, 43(07): 219-226.
[5]孫挺,齊迎春,耿國華.基于幀間差分和背景差分的運動目標檢測算法[J]. 吉林大學學報, 2016, 46(04):1325-1329.
[6]郝毫剛, 陳家琪. 基于五幀差分和背景差分的運動目標檢測算法[J]. 計算機工程, 2012, 38(04): 146-148.
[7]袁益琴, 何國金, 王桂周, 等. 背景差分與幀間差分相融合的遙感衛星視頻運動車輛檢測方法[J]. 中國科學院大學學報, 2018, 35(01): 50-58.
[8] Bhattacharya S, Idrees H , Saleemi I, et al. Moving Object Detection and Tracking in Forward Looking Infra-Red Aerial Imagery. Springer Berlin Heidelberg, 2011.
[9] Cao Y, Wang G, Yan D, et al. Two Algorithms for the Detection and Tracking of Moving Vehicle Targets in Aerial Infrared Image Sequences[J]. Remote Sensing, 2015, 8(1): 28-28.
[10]高振斌, 馮寧楠. 基于機器視覺的電纜護套拉伸長度測量[J]. 計算機測量與控制, 2013, 21(05): 1120-1122.
[11]陳俊松, 龔俊, 張格悠, 等. 基于改進L-K光流法的電纜斷裂伸長率測量技術[J]. 儀器儀表學報, 2021, 42(04): 256-264.
[12]王強, 馬利莊. 圖像二值化時圖像特征的保留[J]. 計算機輔助設計與圖形學學報, 2000(10): 746-750.
[13]甘玲, 林小晶. 基于連通域提取的車牌字符分割算法[J].計算機仿真, 2011, 28(04): 336-339.
[14]李儀芳, 劉景琳. 基于連通域算法的區域測量[J]. 科學技術與工程, 2008(09): 2492-2494.
[15]牛立聰, 孫香花, 左曉寶. 基于Matlab圖像處理的砂石顆粒圓形度計算方法[J]. 混凝土, 2012(01): 10-12.
作者單位:牟少華? ? 日照市工業和信息化局無線電監測站
李志強? ? 日照市職業技術學院
