自動(dòng)駕駛環(huán)境下的網(wǎng)絡(luò)安全預(yù)警系統(tǒng)設(shè)計(jì)
2022-05-27 06:56:38姜明宇張翠平金子瀟
智能計(jì)算機(jī)與應(yīng)用 2022年5期
姜明宇,張翠平,金子瀟
(北京信息科技大學(xué) 計(jì)算機(jī)學(xué)院,北京 100101)
0 引 言
隨著交通智能化、自動(dòng)化的快速發(fā)展,自動(dòng)駕駛已經(jīng)是未來(lái)交通系統(tǒng)的重要組成部分,其在減少尾氣排放、交通擁堵與交通事故方面有巨大潛力。而有關(guān)自動(dòng)駕駛安全性研究一直是學(xué)術(shù)界和工業(yè)界共同關(guān)注的熱點(diǎn)課題。實(shí)際上,交通安全與人民的生產(chǎn)生活密切相關(guān)。但是,作為一項(xiàng)復(fù)雜工程,自動(dòng)駕駛技術(shù)嚴(yán)重依賴(lài)于移動(dòng)互聯(lián)網(wǎng),這就使其也有可能成為網(wǎng)絡(luò)攻擊的一個(gè)對(duì)象。因此,研究自動(dòng)駕駛環(huán)境下的網(wǎng)絡(luò)安全預(yù)警系統(tǒng)具有重要的實(shí)際意義。
當(dāng)前,針對(duì)自動(dòng)駕駛環(huán)境下的安全風(fēng)險(xiǎn)方面已經(jīng)有一些研究。呂穎等人針對(duì)自動(dòng)駕駛車(chē)輛項(xiàng)目開(kāi)發(fā)特點(diǎn),提出一種結(jié)合通用軟件開(kāi)發(fā)過(guò)程標(biāo)準(zhǔn)與敏捷開(kāi)發(fā)過(guò)程的面向汽車(chē)自動(dòng)駕駛軟件安全開(kāi)發(fā)的流程,并應(yīng)用在實(shí)際自主軟件開(kāi)發(fā)項(xiàng)目中。代珊珊等人提出了一種基于動(dòng)作約束的軟行動(dòng)者-評(píng)論家算法對(duì)環(huán)境獎(jiǎng)賞進(jìn)行了合理限制,使無(wú)人車(chē)盡量避免陷入危險(xiǎn)狀態(tài)。結(jié)果表明,引入安全機(jī)制的CSAC方法可以有效避開(kāi)不安全動(dòng)作,提高自動(dòng)駕駛過(guò)程中的穩(wěn)定性。陳吉清等人基于國(guó)家車(chē)輛事故深度調(diào)查體系中的事故數(shù)據(jù),根據(jù)交通環(huán)境要素和測(cè)試車(chē)輛基礎(chǔ)信息選取了若干場(chǎng)景要素,通過(guò)聚類(lèi)分析方法對(duì)車(chē)輛交通事故數(shù)據(jù)進(jìn)行了分析,提出并分析了危險(xiǎn)事故特征。但是,這些內(nèi)容都是針對(duì)自動(dòng)駕駛車(chē)輛在常規(guī)行駛過(guò)程中遇到的安全風(fēng)險(xiǎn)展開(kāi)研究。實(shí)際上,黑客攻擊一直都是網(wǎng)聯(lián)環(huán)境安全的重要風(fēng)險(xiǎn)因素。對(duì)于自動(dòng)駕駛環(huán)境下黑客攻擊的交通流演化特性,研究者們從數(shù)值模擬和解析分析的角度進(jìn)行了研究,但是卻并未根據(jù)這些特性進(jìn)行系統(tǒng)設(shè)計(jì)與開(kāi)發(fā)。基于此,本文則是在自動(dòng)駕駛環(huán)境下針對(duì)黑客攻擊來(lái)進(jìn)行安全預(yù)警研究,并進(jìn)一步就系統(tǒng)設(shè)計(jì)與開(kāi)發(fā)給出了有效解決方案。以期從實(shí)際應(yīng)用的角度為國(guó)內(nèi)無(wú)人駕駛安全風(fēng)險(xiǎn)研究提供有益參考。
1 車(chē)輛跟馳模型
在Li等人的研究中,使用了PATH模型。為使得論文具有更好的完整性和可讀性,簡(jiǎn)要介紹PATH模型如下:
其中,e表示目標(biāo)車(chē)輛間隙誤差;e′表示間隙誤差導(dǎo)數(shù);x表示前面1車(chē)的位置;x表示目標(biāo)車(chē)輛位置;L表示1車(chē)的長(zhǎng)度;t表示當(dāng)前設(shè)置的時(shí)間間隔;v表示目標(biāo)車(chē)輛的速度;v表示前一次迭代中目標(biāo)車(chē)輛的速度;k和k為模型系數(shù),在研究中分別為0.45,0.25;表示迭代時(shí)間步長(zhǎng)。
該模型有物理學(xué)理論依據(jù),有一定的參考價(jià)值。但是,在實(shí)際情況中,可能還有其他因素會(huì)對(duì)數(shù)據(jù)造成影響。
2 風(fēng)險(xiǎn)識(shí)別
指標(biāo)RCRI(Rear-end collision risk indexes)建立了縱向安全與車(chē)輛動(dòng)態(tài)行駛軌跡數(shù)據(jù)間的關(guān)系。在Ye等人的研究中,使用了基于安全停止距離的指標(biāo),此處需用到的數(shù)學(xué)公式如下:
其中,SSD表示前車(chē)停車(chē)距離;表示前車(chē)與后車(chē)間隙距離;v表示前車(chē)速度;d表示減速率;SSD表示后車(chē)停車(chē)距離;v表示后車(chē)速度;t表示延時(shí)。
基于此,在生成IDM模型的模擬數(shù)據(jù)中,可根據(jù)車(chē)輛類(lèi)型標(biāo)記,帶入不同的延時(shí)參數(shù),計(jì)算各個(gè)迭代周期內(nèi)的,即各個(gè)迭代周期內(nèi)的碰撞風(fēng)險(xiǎn)指數(shù)。
3 安全預(yù)警
本文的研究目標(biāo)就是采用基于的預(yù)警。與傳統(tǒng)的基于閾值的預(yù)警方式不同,基于的預(yù)警可能對(duì)針對(duì)位置數(shù)據(jù)的攻擊以及攻擊程度較輕、但受攻擊車(chē)輛較多的情況有更可靠的表現(xiàn)。
根據(jù)Li等人的研究結(jié)論可知,較低嚴(yán)重程度的攻擊可能對(duì)大多數(shù)車(chē)輛造成影響,從而導(dǎo)致單一某一輛車(chē)的風(fēng)險(xiǎn)比例下降,因此,針對(duì)位置數(shù)據(jù)的攻擊可能比針對(duì)速度數(shù)據(jù)的攻擊影響更大。另外,在更多的車(chē)輛受到低嚴(yán)重程度的攻擊時(shí),情況可能比更少的車(chē)輛受到較高嚴(yán)重程度的攻擊時(shí)更加嚴(yán)重。這就意味著黑客可能對(duì)多輛智能網(wǎng)聯(lián)汽車(chē)發(fā)起低嚴(yán)重程度的攻擊,其嚴(yán)重程度依然不小。但在這種情況下,傳統(tǒng)的基于閾值的預(yù)警系統(tǒng)可能無(wú)法觸發(fā)預(yù)警,因?yàn)楣舻膰?yán)重程度并未達(dá)到閾值。而基于的預(yù)警系統(tǒng)就可以有效應(yīng)對(duì)這種情況發(fā)出預(yù)警。
4 UI設(shè)計(jì)與實(shí)現(xiàn)
本系統(tǒng)開(kāi)發(fā)基于Qt開(kāi)發(fā)框架、OpenGL圖形庫(kù)與QChart圖表組件。
Qt是一個(gè)跨平臺(tái)的C++圖形用戶(hù)界面應(yīng)用程序開(kāi)發(fā)框架。PyQt是Qt的Python綁定。使用PyQt5,可以在Qt Designer中通過(guò)拖動(dòng)快捷的以面向?qū)ο蟮姆绞綐?gòu)建UI,再使用PyQt5提供的工具編譯為Python代碼,即可通過(guò)Python進(jìn)行調(diào)用。
OpenGL是一個(gè)用于渲染2D、3D圖形的開(kāi)放圖形庫(kù),利用圖形加速硬件得以高效實(shí)現(xiàn),支持多種平臺(tái),傳入模型數(shù)據(jù),使用GLSL語(yǔ)言編寫(xiě)著色器程序,即可渲染2D/3D圖形(參見(jiàn)圖1)。PyOpenGL是對(duì)應(yīng)的Python綁定,支持通過(guò)Python調(diào)用接口函數(shù)來(lái)高效渲染圖形。
圖1 OpenGL渲染3D圖像示例Fig.1 An example of rendering 3D images by OpenGL
QChart是一個(gè)易用的圖表組件,可通過(guò)簡(jiǎn)單的接口調(diào)用,就能快速實(shí)現(xiàn)如折線圖、柱狀圖、雷達(dá)圖、餅圖等圖表。
UI示例如圖2所示。在圖2的預(yù)警系統(tǒng)UI中,左邊部分使用PyOpenGL實(shí)時(shí)多線程渲染每一個(gè)模型,可視化顯示周?chē)熊?chē)信息。在模型渲染區(qū)域上方,疊加QPainter渲染層,顯示當(dāng)前車(chē)輛的速度、轉(zhuǎn)向指示等基本信息。
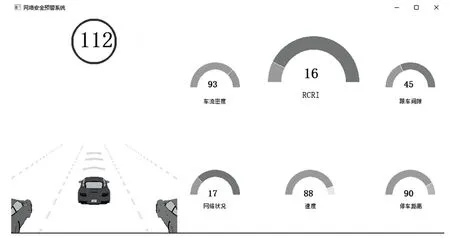
圖2 UI示例Fig.2 The example of UI
UI右邊部分為數(shù)據(jù)可視化區(qū)域,包含著網(wǎng)絡(luò)狀況、車(chē)流密度、速度、跟車(chē)間隙等關(guān)乎安全的信息,在數(shù)據(jù)圖中間,放大的數(shù)據(jù)圖顯示最終計(jì)算的,這是主要的預(yù)警基礎(chǔ),下面亦會(huì)提及。除此之外,數(shù)據(jù)圖表還支持基本的交互,如互換位置實(shí)現(xiàn)不同數(shù)據(jù)的放大顯示、某一個(gè)數(shù)據(jù)圖表的單獨(dú)放大顯示。
在UI設(shè)計(jì)中,最基本的實(shí)現(xiàn)預(yù)警的方法就是視覺(jué)預(yù)警。在數(shù)據(jù)圖表部分,通過(guò)簡(jiǎn)單的顏色變換,實(shí)現(xiàn)了基本的視覺(jué)預(yù)警,以滿(mǎn)足研究階段驗(yàn)證系統(tǒng)可行性的需求。在實(shí)際應(yīng)用中,還可以根據(jù)硬件條件,結(jié)合其他領(lǐng)域的方法,實(shí)現(xiàn)聲音預(yù)警、觸覺(jué)預(yù)警等。
5 結(jié)束語(yǔ)
在本次的研究中,設(shè)計(jì)了一個(gè)自動(dòng)駕駛環(huán)境下的網(wǎng)絡(luò)安全預(yù)警系統(tǒng),并實(shí)現(xiàn)了基本的視覺(jué)預(yù)警以測(cè)試系統(tǒng)基本可行性。但實(shí)際應(yīng)用中,僅研發(fā)出視覺(jué)預(yù)警還遠(yuǎn)遠(yuǎn)不夠,預(yù)警方式也并非本次研究的重點(diǎn),論文在研究中主要是進(jìn)行了跟馳模型的建立、以及從識(shí)別風(fēng)險(xiǎn)到發(fā)出預(yù)警的技術(shù)實(shí)現(xiàn)。將來(lái),還要結(jié)合人機(jī)交互學(xué)、生物學(xué)、生理學(xué)等方面的經(jīng)驗(yàn)對(duì)預(yù)警方式進(jìn)行研究。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
體育科技文獻(xiàn)通報(bào)(2022年3期)2022-05-23 13:46:54
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機(jī)設(shè)計(jì)與研究(2019年4期)2019-05-21 07:21:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
足球周刊(2016年14期)2016-11-02 10:54:56
足球周刊(2016年15期)2016-11-02 10:54:16