自動駕駛車隊出口道左轉交叉口軌跡最優控制
2022-05-27 06:56:44吳健章張范磊劉松澤張高毅陳清蓉
智能計算機與應用 2022年5期
吳健章,張范磊,劉松澤,張高毅,陳清蓉,王 澤,趙 靖
(上海理工大學 管理學院,上海 200093)
0 引 言
交叉口內不同流向的機動車共享著有限的時空資源,資源分配不合理導致交通擁堵。為緩解交通擁堵,主要的應對策略有:優化信號配時、加強管控力度或者改設非常規交叉口等。針對左轉車流需求大的交叉口,Zhao等人研究了出口道左轉交叉口的設計,對同一車道在不同的時間段內調整其功能,使交叉口的通行效率提高。在多個城市交叉口的落地實施發現,通行能力的提升并沒有達到預想的目標,原因在于駕駛員不適應該交叉口的運行方式,導致出口道的利用率不高。
針對自動駕駛的研究,宗芳等人考慮前后車車頭間距、加速度差等因素,建立混流跟馳模型。張名芳等人考慮在人機混合駕駛環境下,提出了自動駕駛汽車左轉運動規劃模型。吳偉等人考慮車輛在交叉口內部的行駛軌跡,在保障車輛在交叉口能安全通過的前提下,提出了自動駕駛交通控制模型。針對車聯網環境下對交叉口處的車輛速度進行控制,國內外學者有較多代表性的研究,Zohdy等人將車速作為控制變量,建立了非線性軌跡優化模型。談超鵬等人利用車輛排隊信息,對周期內最大排隊長度進行估計。鹿應榮等人結合駕駛的舒適性以及環境的友好性提出了信號交叉口車速的控制策略。多輛自主車輛組合形成車隊高效控制,覃頻頻等人就車輛運行的特點以及道路的幾何設計建立三自由度車輛動力學模型。Chen等人基于“1+”的混合排的線性化動力學模型,對臨近交叉口的車輛實行控制。當前,對車隊的建模主要還是構建線性系統,顏坤等人對車隊跟馳的穩定性進行了驗證。交叉口內的危險主要體現在相位切換,不同方向的車流沖突在一起,在軌跡數據實時監測情況下,可以預防危險駕駛行為。Luo等人從車輛數據交互的角度提出避免沖突的換道軌跡設計方法。
綜上,國內外積累了大量關于自動駕駛汽車以及車輛軌跡方面的研究,鮮有考慮對自動駕駛車隊的軌跡進行優化的研究。在車聯網的快速發展下,本研究將通過對自動駕駛車隊軌跡控制,探究其通過交叉口的最優控制策略。本文主要有以下2點貢獻:
(1)建立了出口道左轉交叉口車隊最優控制模型,進而提出車隊的控制策略。
(2)通過數值分析了車輛常規控制與車隊控制的行駛策略,并驗證模型的可行性及有效性。
1 出口道左轉交叉口特征
出口道左轉交叉口的幾何布局如圖1所示,其設計思路為:在出口道區域內設置一個功能區,對一個信號周期內的部分時間,通過預信號的控制,左轉車輛可以有選擇地從中央分隔帶進入綜合功能區內等待放行;預信號紅燈時,各車道功能與常規狀態相同。這一設計與常規車道相比,顯然增加了左轉車輛的通行空間,車道總數也得到增加,在左轉交通量較大的情況時,其具備更高的通行能力。當主信號綠燈放行時,綜合功能區內的車輛跟常規左轉車道車輛駛出交叉口。出口道左轉交叉口的設計,對直行、右轉車輛的放行沒有影響,其控制方式與常規交叉口相同,與常規交叉口在幾何特征上主要有2點不同:
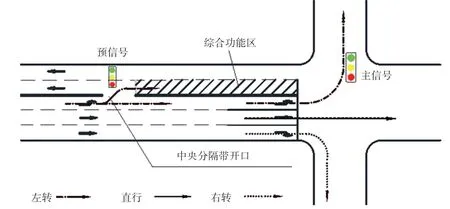
圖1 出口道左轉交叉口幾何布局Fig.1 The geometric layout of the left-turn intersection of the exit road
(1)預信號與主信號配合。在中央分隔帶開口設置預信號,通過主、預信號的配合控制整個交叉口。預信號綠燈時,出口道內不允許存在對向駛來車輛;主信號左轉放行結束后,出口道內左轉車輛需全部清空。預信號配時決定著綜合功能區左轉效率的提高程度,因此,預信號的綠燈時間是一個重要的調整參數。
(2)綜合功能區。出口道內由停車線到中央分隔帶開口的一條或多條組成的空間區域被定義為綜合功能區。綜合功能區的長度以及車道總數是重要的影響參數,對整個交叉口通行效率有較大影響。針對左轉流量較大的交叉口時,可以適當地增加車道數或者功能區長度。確保綜合功能區內的車輛在規定時間內全部清空,綜合功能區長度不宜過長;若綜合功能區長度過短,無法提高交叉口所需要的效率。因此,功能區幾何參數決定著整個交叉口通行效率。
2 出口道左轉交叉口車隊最優控制模型
2.1 模型假設
針對智能網聯車的特性,提出以下2點假設:
(1)交叉口內車輛均為自動駕駛車輛,控制域內車輛的信息可以被路側感應器和車載感應器全部采集并實時交互。
(2)車載傳感器可以從中央控制器獲取系統狀態信息,主要包括車輛的加速度、縱向位置以及交叉口的幾何參數信息等。
2.2 目標函數
考慮具有固定預測時域的控制周期[,],車隊的車輛在預測時域內,通過控制其縱向加速度和換道策略來規劃軌跡。考慮車隊車輛通過交叉口的效率以及盡可能平穩地通過該交叉口,本文建立車隊在出口道左轉交叉口的多目標規劃模型。該模型的主目標用于提高交叉口內左轉車輛的整體通行效率,具體公式如下:

這里,(z-1)≤x()-x≤Mz,研究后可推得:

其中,x()為時刻車輛所在位置;為受控車抵達控制范圍的時間(s);為控制周期(s);x為主信號停車線縱向位置(m);為懲罰因子。
次目標使整個車隊盡可能平穩地通過交叉口,次目標的數學公式可寫為:

其中,a為車輛在時刻的加速度。
2.3 約束條件
(1)控制變量。 受控車輛加速度控制在2個邊界范圍內,對應的數學公式可寫為:

其中,()為受控車在時刻的最高加速度(m/s);為受控車在時刻最高減速度(m/s)。
(2)控制變量l。 本文對車道控制變量的取值為0和2,對應的數學公式可寫為:

其中,l()0,表示受控車在時刻不采取換道措施;l()2,表示受控車在時刻采取換道措施。
(3)狀態變量。 車輛在交叉口控制范圍內不允許倒車,且不高于最高限速。故受控車輛的速度應在零和最大速度范圍內,對應的數學公式可寫為:

(4)狀態變量。 狀態變量僅對車道的功能屬性進行區別,本文將常規左轉車道和綜合功能區內車道編號分別定義為-1和1,對應的數學公式可寫為:

為避免車輛在綜合功能區內發生沖突,左轉車輛不能在主信號綠燈結束至下一周期預信號綠燈開始的時間段內進入綜合功能區,對應的數學公式可寫為:


(5)狀態變量。 車輛進入出道口左轉交叉口的控制域內,除受主信號紅燈影響外,變道的位置也受到限制(如圖2所示)。車輛只能在中央分隔帶開口處換道進入綜合功能區,式(9)、式(10)限制發生變道的起始和結束位置:

圖2 中央分隔帶開口參數Fig.2 Opening parameters of the central partition
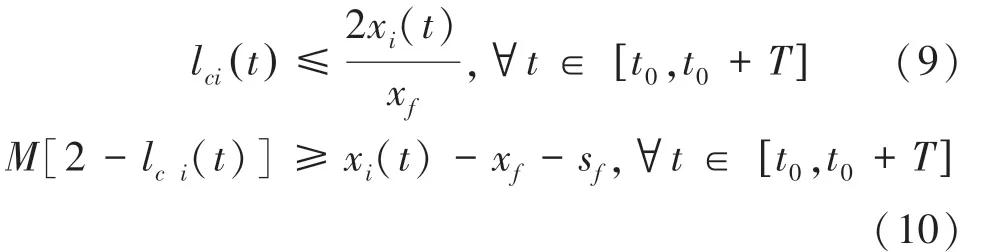
其中,x表示中央分隔帶起始位置(m);s為中央分隔帶開口寬度(m)。
(6)安全距離。系統內任意2輛車之間均需保持安全距離,對應的數學公式可寫為:

其中,l()為控制系統車隊車輛在時刻所在車道類型;()表示車輛和車輛之間需要保持的最小安全距離(m);安全距離由受控系統車隊車輛在時刻的速度決定,由公式(11)求得:

其中,d表示車身長度(m);d表示必要的安全制動距離(m);h表示安全車頭時距(s);()表示后車速度(m/s)。
3 仿真與數值分析
3.1 車隊軌跡規劃求解方法
本文以構建的多目標公式(1)、(3)作為目標函數,賦予權重、(其中1)轉化為單目標規劃,公式(4)~(12)作為約束。由于該模型為混合整數非線性規劃(MINLP),本文用CasADi求解器在Matlab環境下使用BONMIN算法進行求解。BONMIN是一種基于LP/NLP的分支定界算法,對MINLP問題求解效率較高。
3.2 算法流程
參數輸入,包括出口道左轉交叉口的幾何參數、左轉流量、主信號以及預信號配時等信息,轉Step2。
更新車輛的位置、速度等信息,增加當前時刻約束。判斷是否達到預設最大迭代次數,若滿足迭代次數,轉Step3;未達到最大迭代次數,繼續執行Step2。
構建目標函數表達式,BONMIN算法求解,轉Step4。
車隊軌跡生成、運行策略輸出。
3.3 仿真參數預設
本文選取綜合功能區只有一條車道的出口道左轉交叉口,由8輛左轉車組成的車隊,按其初始位置與停車線的距離依次編號為1,2,…,8。8輛車在控制域內位于常規左轉車道,現對出口道左轉交叉口的幾何信息以及主要的參數進行設定見表1。
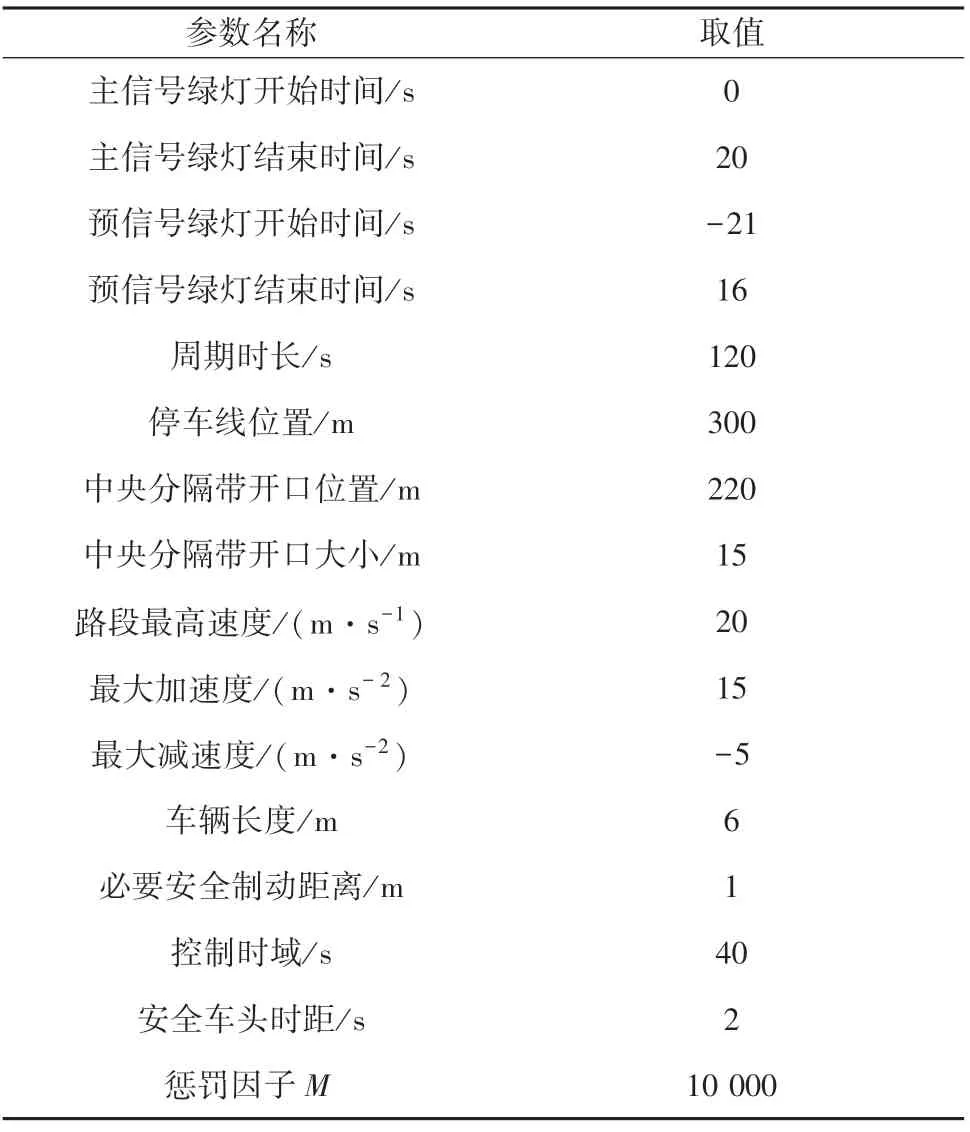
表1 參數設定Tab.1 Parameters setting
3.4 案例分析
本文所探究的車隊軌跡控制方法,對整個車隊的加速度和換道變量進行控制,車隊車輛受控前軌跡圖如圖3所示,車隊車輛受控后軌跡如圖4所示。從圖4可以看出,在該案例中,控制域內的車隊車輛采取的策略有以下3種:不換道-不停車、不換道-停車、換道-停車。對此擬做研究分述如下。
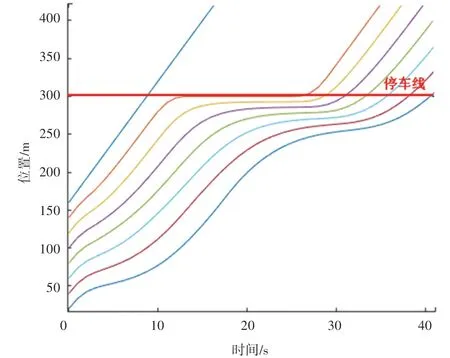
圖3 車隊車輛受控前軌跡Fig.3 The trajectory diagram of the convoy vehicles before being controlled
(1)策略1:不換道-不停車。由圖4實線軌跡分析可知,車輛1、8最終采取的策略為不換道-不停車。車輛1在常規左轉車道行駛,由于其前面沒有車輛,且當前時段為主信號、即綠燈,車輛1保持原有速度通過交叉口;車輛8跟隨車輛7在常規車道行駛,當車輛8將要到達停車線時,主信號已經綠燈,車輛1、2、6、7依次通過交叉口,車輛8不需要排隊減速,可直接駛離交叉口。
(2)策略2:不換道-停車。由圖4虛線軌跡分析可知,根據對車隊整體的規劃,車輛2、6、7最終采取不換道在常規左轉車道停車線停車等待放行的策略。在車輛1已通過交叉口的情況下,車輛2到達停車線,此時為紅燈,停車等待放行;車輛6、7由于整體規劃的原因,車輛3、4、5優先進入到綜合功能區內,此時與常規左轉車道相比,綜合功能區的排隊長度更長,所以車輛6、7在常規車道行駛排隊于車輛1后面,等待主信號放行。
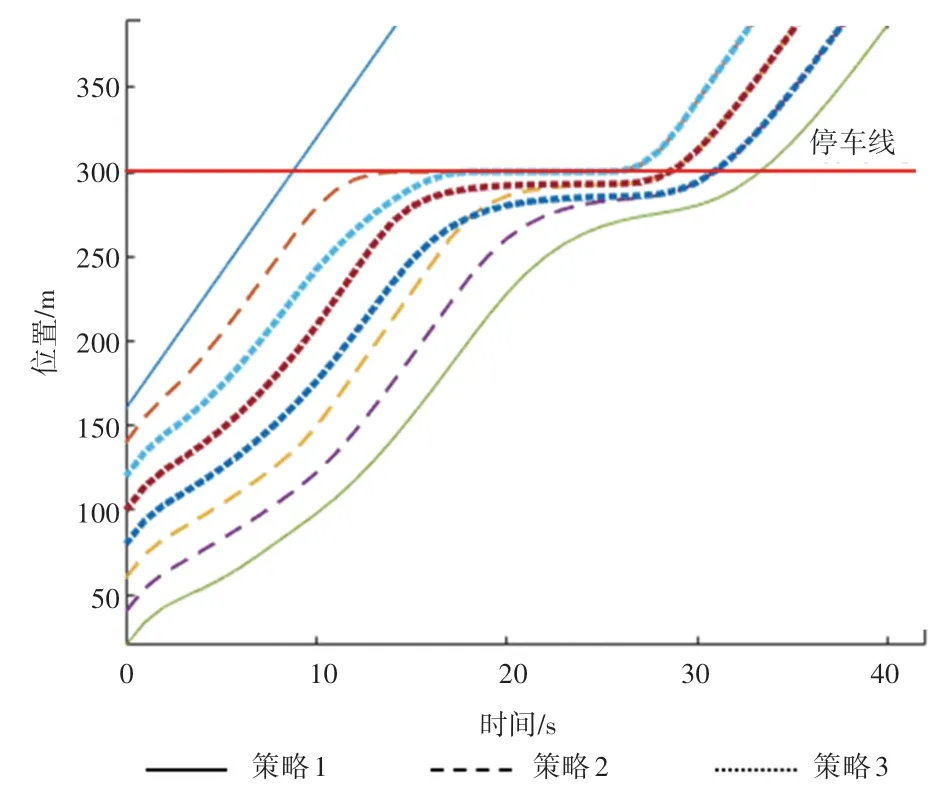
圖4 車隊車輛受控后軌跡Fig.4 Trajectory diagram of the convoy vehicles after being controlled
(3)策略3:換道-停車。由圖4點軌跡分析可知,車輛3、4、5最終選擇在中央分隔帶開口處進入綜合功能區內排隊等待放行。考慮對車隊整體的規劃,使得該車隊能夠最優地通過交叉口。車輛3、4、5經過分隔帶開口時,預信號為綠燈,將優先進入綜合功能區等待放行。通過實行該策略,車輛6、7的放行序位也得到了提升,進而提高了整個車隊在該交叉口通過的效率。
利用Matlab執行程序得出通行能力數據,通行效率提升情況見表2,本文所提出的出口道左轉放行策略相對于常規交叉口放行策略在通行能力上提高了11.6%,對交叉口的通行效率有較大提升。
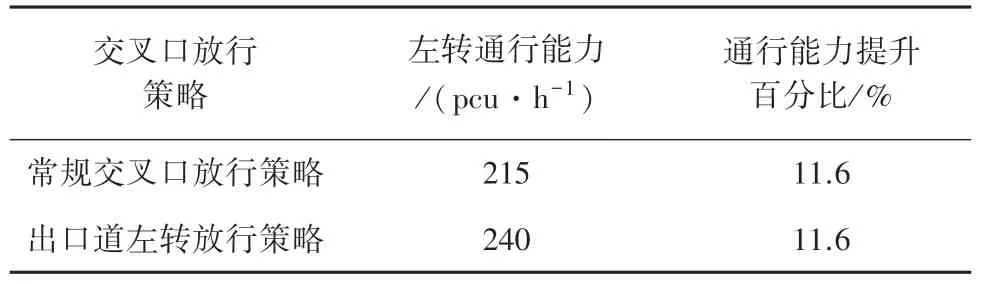
表2 通行能力對比Tab.2 Comparison of traffic capacity
綜上,該數值仿真案例中整個車隊決策合理,與車隊車輛受控前相比,部分車輛的放行順序提前,全局的控制策略對本案例的通行效率有明顯的提高。因此,本文所提出的自動駕駛環境下,出口道左轉交叉口車隊的軌跡控制模型合理,對整個交叉口的通行效率有一定程度提高。
4 結束語
本文建立的自動駕駛車隊軌跡控制模型,對整個車隊的車輛在出口道左轉交叉口的行駛軌跡策略做了優先規劃,全部車輛按照已規劃的軌跡運行。通過仿真對模型進行驗證,得出以下結論:
(1)車隊的車輛按照模型規劃好的軌跡行駛,不僅能合理利用對向出口車道,對功能區的利用率以及交叉口的通行效率也有一定程度的提升。
(2)案例中車隊車輛的運行策略主要包括3種:不換道-不停車、不換道-停車、換道-停車。研究中建立的模型能夠根據車隊到達狀態制定相應的通過策略,模型具有較高的適用性以及廣泛的應用場景。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03