基于降維算法從少量測量數據中重構溫度場
2022-05-27 06:56:48王一桂朱道興
智能計算機與應用 2022年5期
關鍵詞:測量
羅 蕓,錢 進,王一桂,朱道興
(1貴州大學 電氣工程學院,貴陽 550025;2中國電建集團貴州工程有限公司,貴陽 550025)
0 引 言
溫度分布信息對鍋爐、大氣層、海洋等的監測都非常重要,其獲取方法大概可以分為2種:計算方法和測量方法。在實際應用中,2種方法都有其局限性。計算方法是將數學問題離散化形式表示,但由于計算方法運算過程復雜且對計算資源要求較高,溫度信息再現實時性差。測量方法受測量環境、被測物結構、測量設備安裝以及工程造價等因素的影響,難以獲得全面溫度分布信息。
為了對適合工業現場溫度分布進行快速、準確的重建,將降維算法引入溫度分布重建,綜合計算方法和測量方法的優點,由計算方法提供溫度分布重建的樣本數據集,測量方法得到少量溫度傳感器數據,使用數據降維算法提取樣本數據集中溫度分布特征,結合有限溫度測量數據對溫度分布實現實時重建。
利用本征正交分解(POD)降維方法進行溫度分布重建以及分析,獲得良好的效果,也是近些年來的研究熱點。POD算法是數據驅動的維度降低算法,從大量的已知數據中提取元數據的主要特征,得到原數據的低維表達。Woojin等人采用本征正交分解方法提取低維基向量,重構了500 MW切向燃燒煤粉鍋爐溫度場,重構效果良好。在POD方法的基礎上Sirovich等人首次提出了Gappy POD方法,該方法利用POD基結合部分測量數據重建缺失數據進行補全重構。與常用的基于POD的降維方法相比,Gappy POD的顯著優點之一是其系數矢量是根據部分測量數據求解的,不需要了解測量對象物理過程的詳細信息。Lei等人基于Gappy POD方法,提出數值模擬信息和測量信息相結合,從局部測量數據中重建穩定溫度場,通過數值仿真驗證了其可行性和有效性。陳敏鑫等人、及孫單勛提出了一種將CFD信息融合至Gappy POD算法中實現了對物理場的實時重建方法,該方法重建范圍大,準確性高,為未來物理場預測重建提供了一種新的思路。
綜上所述,提出基于Gappy POD算法,結合部分測量數據對溫度場進行準確重建,具體重建流程如圖1所示,并分析研究Gappy POD算法進行重建時,POD基個數、傳感器數量和測量位置等因素對溫度場重建的影響。
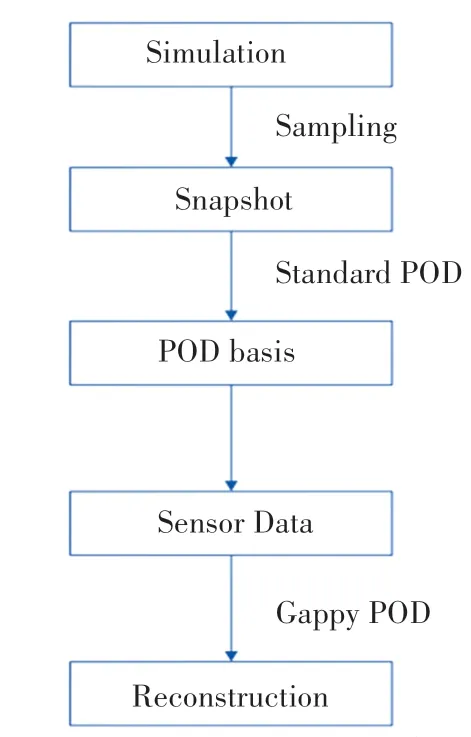
圖1 重建流程Fig.1 Reconstruction process
1 本征正交分解方法
1.1 標準POD方法
標準POD方法主要思想是將原始溫度場分解為基函數(POD基)和基系數的線性組合。應用POD算法,原始溫度場組成的快照矩陣的大部分信息由少數POD基近似表示,進而實現了降維。
將多組溫度場數據構成快照矩陣合集(x,t)(1,),是空間坐標,是溫度場標量編號。其樣本矩陣形式可表示為:

計算快照矩陣各個節點的平均值,即:

由此得到溫度場的脈動量矩陣,即:


其中,為特征值,為特征向量。
通過式(6)、式(7)可以計算各階POD基Φ()和其對應的模態系數a(),具體公式如下:

POD基表示捕獲溫度場的主要特征,前個POD模態所捕獲的能量占全階模態的能量為:

快照矩陣中任意溫度場可以由溫度場的平均值和一組基模態和線性組合來重構,即:

1.2 Gappy POD方法








為了使值最小,對上式中的b求偏導,令偏導等于0得到誤差最小值。研究推得的數學公式如下:

整理得:
進一步地,可以計算出:


為了后文的論述,定義均方根誤差為重建誤差:

2 溫度場重建仿真研究
2.1 二維溫度場模型仿真
為了對待測對象進行二維溫度場仿真研究,采用雙峰偏斜溫度場模型,運用Matlab軟件進行仿真實驗。
雙峰偏斜數學模型:
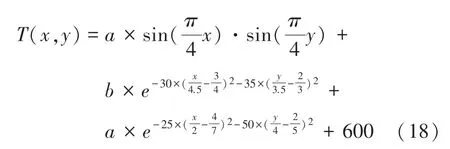
其中,(,)表示雙峰偏置溫度分布模型坐標點(,)處溫度值(K);表示橫坐標(m);表示縱坐標(m);、表示邊界條件。
使用式(18)在計算區域內計算溫度值,計算區域為4×4 m,采樣步長為0.1 m,采集1 681個溫度值,形成溫度分布數據。計算不同邊界條件下的溫度分布數據,構建樣本數據集以及測試集。設定雙峰偏斜溫度分布模型樣本數據集以及測試集邊界條件見表1、表2。
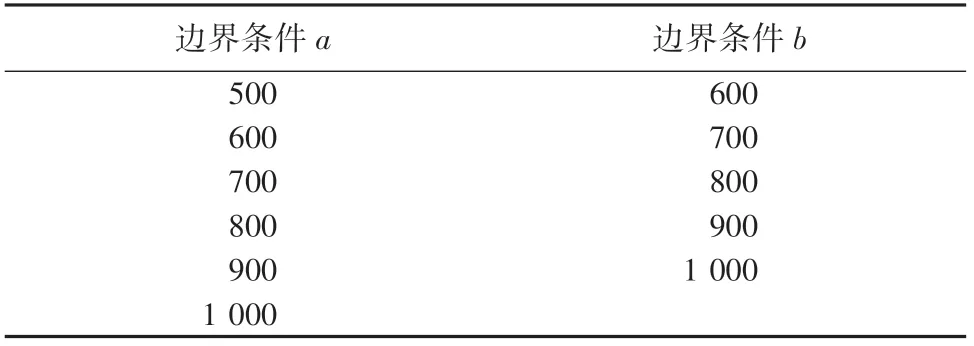
表1 樣本數據集邊界條件Tab.1 Boundary conditions of sample data sets
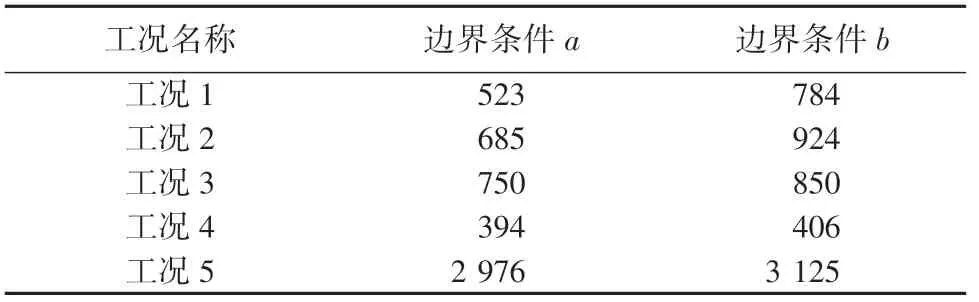
表2 測試數據集邊界條件Tab.2 Boundary conditions of test data sets
根據表1、表2給出的邊界條件,共有30組樣本數據和5組測試數據,應用公式(15),計算溫度分布數據,采樣形成維數為1 681×30的樣本數據集和維數為1 681×5的測試數據集。
2.2 溫度場重建結果
在本節中,使用Gappy POD方法結合部分溫度測量數據重建溫度場。將樣本數據集進行特征分解,按照公式(8)確定POD基的個數,構成轉化矩陣,選擇幾個坐標點作為實際溫度測點,坐標點的溫度數據作為溫度測量值,結合轉化矩陣對測試數據集進行溫度場重建。
首先對30個不同工況的樣本數據集進行POD分析,得到用于重構溫度場的POD基。不同POD基所占能量曲線和前兩階POD模態分別如圖2、圖3所示。從圖中可以看出前兩階POD模態所占能量幾乎是總能量的100%,這意味著高維數據可以用2個空間模態來準確表達,高維數據可以得到顯著壓縮。

圖2 各階POD基所占能量Fig.2 The energy of each order POD base
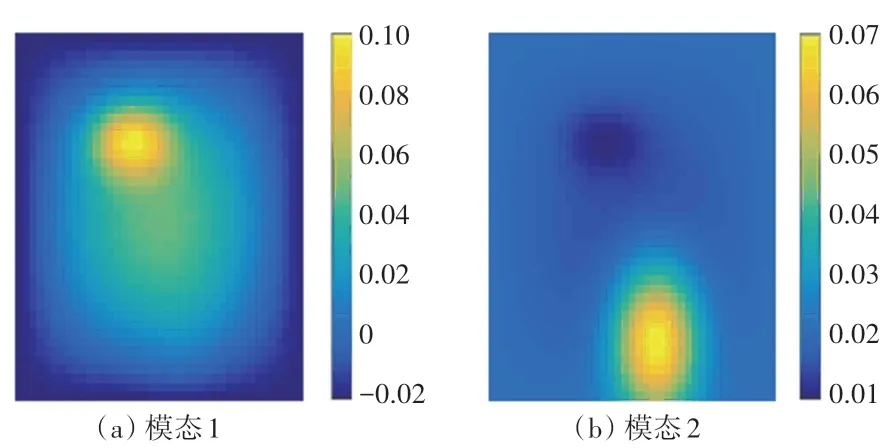
圖3 前兩階POD模態Fig.3 The first two order POD
其次,對表2中的5組測試工況選擇前兩階POD模態、10個溫度測點和相同測點位置進行溫度分布重建。重建結果如圖4所示,圖4(a)~(e)展示了測試工況原始溫度場,圖4(f)~(j)給出了重建溫度場結果。按照公式(17)計算重建誤差如圖5所示。
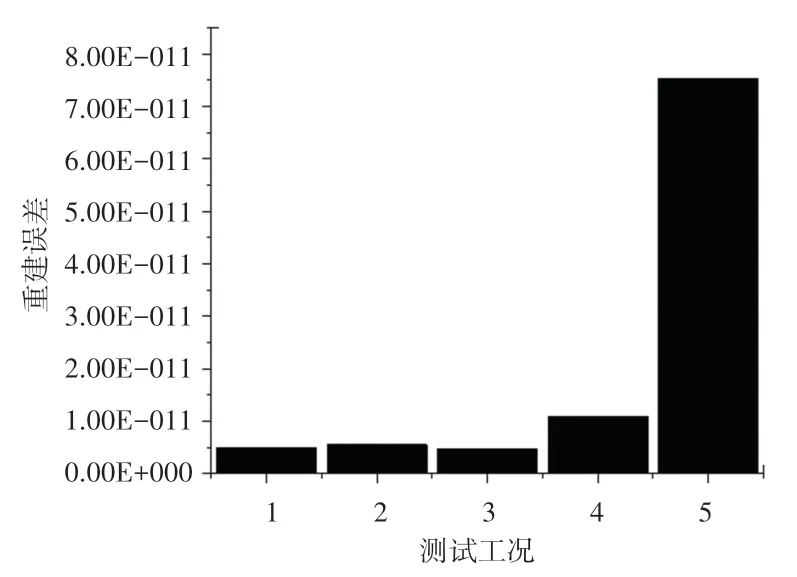
圖5 測試工況重建誤差Fig.5 Test condition reconstruction errors
由圖4可以看出,重建溫度分布與原始溫度分布大致保持一致,重建效果良好。
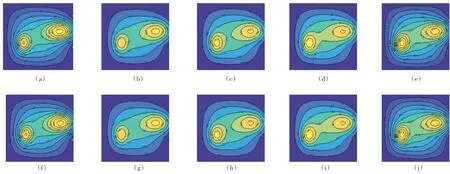
圖4 重建結果Fig.4 Reconstruction results
圖5 中,樣本工況范圍內的測試工況1~3的重建誤差小于在樣本范圍外的測試工況4~5的重建誤差,但其溫度分布重建效果同樣良好,全部測試工況重建誤差均在1×10之下;測試工況4離樣本工況范圍近,測試工況5離樣本工況范圍遠,測試工況5的重建誤差大于測試工況4的重建誤差。因此結合Gappy POD和部分測量數據的溫度分布重建算法有著良好的適用性和準確性。
3 溫度場重建結果誤差分析
針對溫度場的重建,使用控制變量法來分析POD基個數、傳感器數量(測點數量)、傳感器放置位置(測點位置)等因素對重建結果造成的影響。為了消除實驗帶來的隨機誤差,所有結果均進行了多次,做圖數據為多次實驗的平均值。
3.1 POD基數量對重建結果的影響
圖6中展示了測試工況1的重建誤差隨著POD基數量的變化情況。利用10、50和70個實際測量數據,在固定的測量數據情況下,隨機選取不同位置的測點進行溫度重建計算,做圖數據為多次計算的平均值,消除測點位置對結果產生的影響。從圖6中可以看出,使用前兩階POD基進行重構,比使用前一階POD基進行重構,重構誤差大大減小,重構誤差隨著POD基數量的增加,先減小、而后趨于穩定。3種不同的測點數據下,重建誤差隨POD基數量的變化保持相同的趨勢。
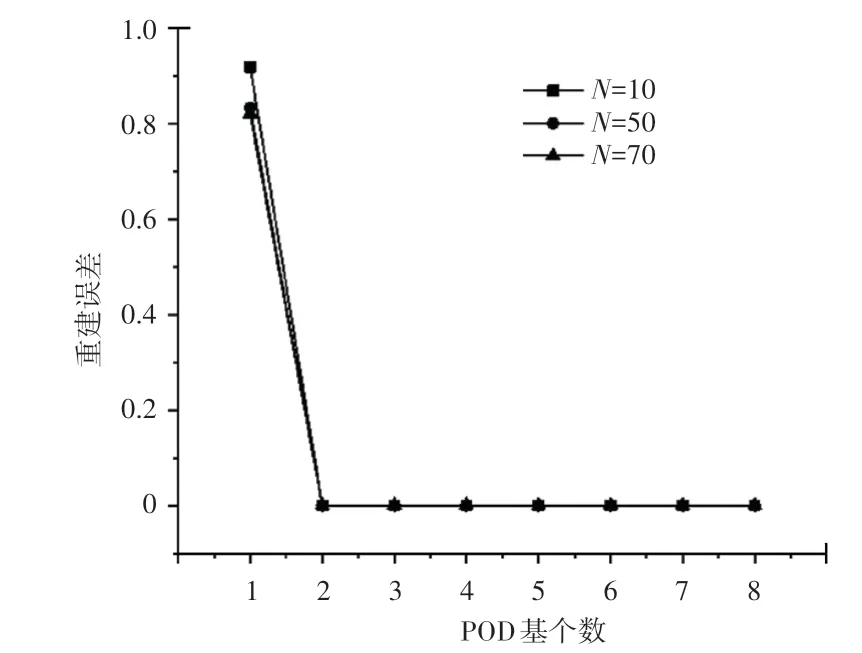
圖6 利用10、50和70個測量數據,重建誤差隨POD基數量變化曲線Fig.6 The reconstruction errors curve with the number of POD bases by using 10,50 and 70 measurements
3.2 測點位置對重建結果的影響
圖7為3和5個傳感器在隨機位置點的重構誤差。
從圖7中可以看出,由于測量數據的測點位置是隨機的,即使同樣數量的測點數據,測點位置不同,重建誤差變化較大。
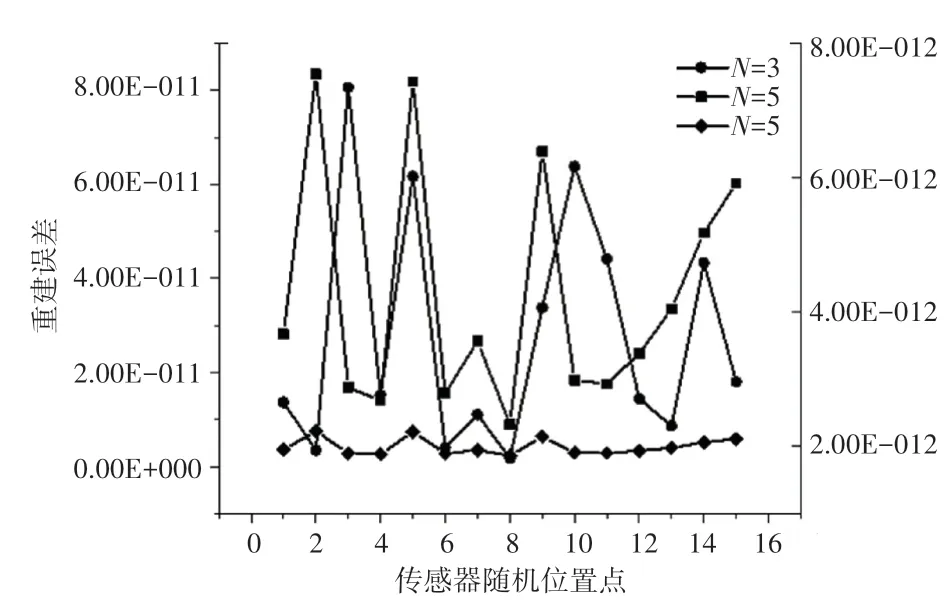
圖7 3和5個傳感器數量在隨機位置點下的重構誤差Fig.7 Reconstruction errors of 3 and 5 sensors at random position points
圖8為利用2個POD基在不同傳感器數量和不同隨機位置下重構的誤差,選取不同數量的測量數據,隨機選擇測點位置,進行5組實驗,得到5組計算結果。由圖8可以看出,不同隨機位置測點的重建誤差均是隨傳感器測量數據數量的增加由降低到趨于穩定,但測點位置不同,其重建誤差也不相同。
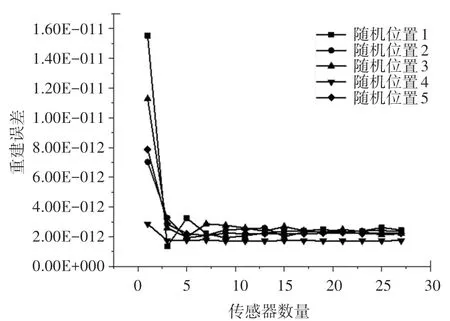
圖8 不同傳感器數量和不同隨機位置的重建誤差Fig.8 Reconstruction errors of different random positions with different number of sensors
由此可見傳感器的放置位置十分重要,不同的放置位置對其在溫度分布重建算法中影響程度也不同。
3.3 測點數量對重建結果的影響
在傳統的溫度預測和重構中,預測和重構結果準確度高需要大量的傳感器測量數據做支撐,然而,大量傳感器使用卻需要大量資金、人力和物力投入。因此,盡量少的傳感器數量使用也是衡量預測重構模型的標準之一。由上文可知測點位置對重建結果的影響,為消除此影響,對此進行多次計算取平均值。
利用一階、二階和三階POD基進行重建,重構誤差如圖9所示。由圖9可以看出,一階POD基重建誤差隨傳感器數量增加雖呈下降趨勢,但過程跌宕起伏;二階和三階POD基重建誤差隨傳感器數量增加而減少、再趨于穩定。一階與二、三階趨勢不相同,這是因為一階POD基所占能量較低,對數據反應能力較弱,這與前文中提出的結論是一致的。
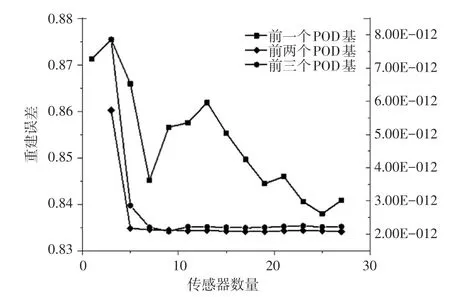
圖9 不同POD基在不同傳感器下的重構誤差Fig.9 Reconstruction errors under different sensors with different POD bases
由圖8和圖9可知,重建誤差均在測點數量為5后趨于穩定,由此可知傳感器最佳數量為5個。
4 結束語
(1)針對有限的已知測量數據的溫度場重構,本文結合Gappy POD方法,利用少量POD基能夠快速準確地重構溫度場,為了驗證算法的可行性和適用性,重建5組測試工況,重建誤差均在精度要求范圍內,對于其邊界條件不在快照矩陣范圍內的測試工況4、5的重建,仍有令人滿意的重建結果。
(2)重構誤差隨POD基數量的增加先減少、而后趨于穩定,少量的POD基就能重構溫度場,對后續低階模型有一定指導意義。
(3)同樣數量的傳感器,放置位置不同,重建誤差變化較大,由此可見測點位置所攜帶信息重要程度在重建算法中也各有不同,因此測點位置的優化布置尤為重要,后期會對最佳測點位置方式進行研究。
(4)重建誤差隨傳感器數量的增加先減少、再趨于穩定,根據成本和計算準確性考慮,傳感器布置最佳數量為5個,顯著地減少測量傳感器的數量,可降低溫度分布測量的復雜性與測量成本。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00