基于機器視覺的停車場智能尋車系統
2022-05-27 06:56:22杜嘉豪黃孝慈邢孟陽
智能計算機與應用 2022年5期
杜嘉豪,黃孝慈,邢孟陽
(上海工程技術大學 機械與汽車工程學院,上海 201620)
0 引 言
近些年來,國民生活質量日益改善和提高,與此同時機動車輛數也在迅速地增長,但隨即卻也出現了“停車難”以及“找車難”等一系列問題。如今,在購物商場等大型停車場內,停車困難與找車困擾成為了汽車業務的兩大主要問題。究其原因有2個方面,首先是在熱門區域地段,公共停車站泊位緊張;其次,由于復雜停車場占用空間大和方向不易辨別等原因,導致車主們尋車時容易會陷入迷路,從而浪費大量時間。所以智能尋車系統成為學術界的熱點研究課題,并已經對此進行大量的探索和嘗試,提出了多種解決方案。但提出的解決方案均存在著不同的技術缺陷,例如尋車精度和效率較低或者執行成本過高等,都無法完美地解決上述問題。
在此背景下,提出一種基于機器視覺的停車場智能尋車系統,有效解決了在復雜大型地下停車場內,車主難停車、尋車時易迷失方向,且找車困難的問題。停車場電子地圖可以在移動終端顯示屏誘導,通過車牌識別模塊和路徑規劃模塊相結合,幫助車主找到自己車輛停放的位置。該系統使車主停車和找車更加方便,大幅提升停車場的運營管理效率。在車牌識別模塊方面,系統改進YOLOv3檢測模型和CRNN字符識別模型,提高了車牌檢測及車牌號識別速率。在路徑規劃模塊方面,系統改進A算法,提高路徑尋找的準確率和效率。
1 系統總體設計與架構
本文系統技術路線如圖1所示。圖1中給出了智能尋車系統的整體構架,以及信息的處理模式。整個系統依托Matlab軟件平臺開發界面,由前端與后端組成,系統中至關重要的構成是圖像信息采集和算法決斷部分。其中,信息采集負責提取車牌圖像信息。算法決斷系統是智能尋車系統的最核心的組成部分,根據車牌識別到的車牌文本信息與人工輸入的車牌信息匹配,結合攝像頭位置信息,定位到車輛位置,最終規劃出一條移動終端到所尋車輛的最短路線,并在終端進行顯示。
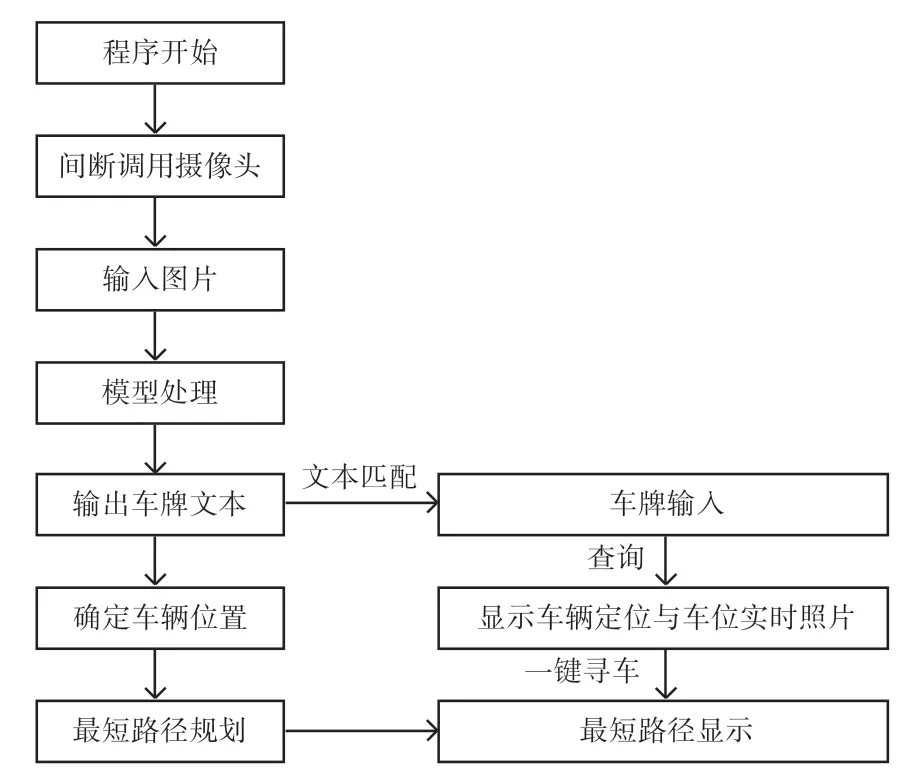
圖1 系統技術路線框架圖Fig.1 Technical route diagram of the system
本文旨在研究智能尋車系統,,將以機器視覺為基礎,以復雜多變的地下停車場為研究目標,通過車牌識別模塊和路徑規劃模塊在中央服務器融合,在移動終端觸控操作并顯示尋車路徑,設計并實現了地下停車場尋車導航系統。本文系統的各個環節及總流程如圖2所示,是一個機器視覺與人工智能交叉的學科系統,主要由車牌識別模塊、路徑規劃模塊、移動終端模塊等部分組成。
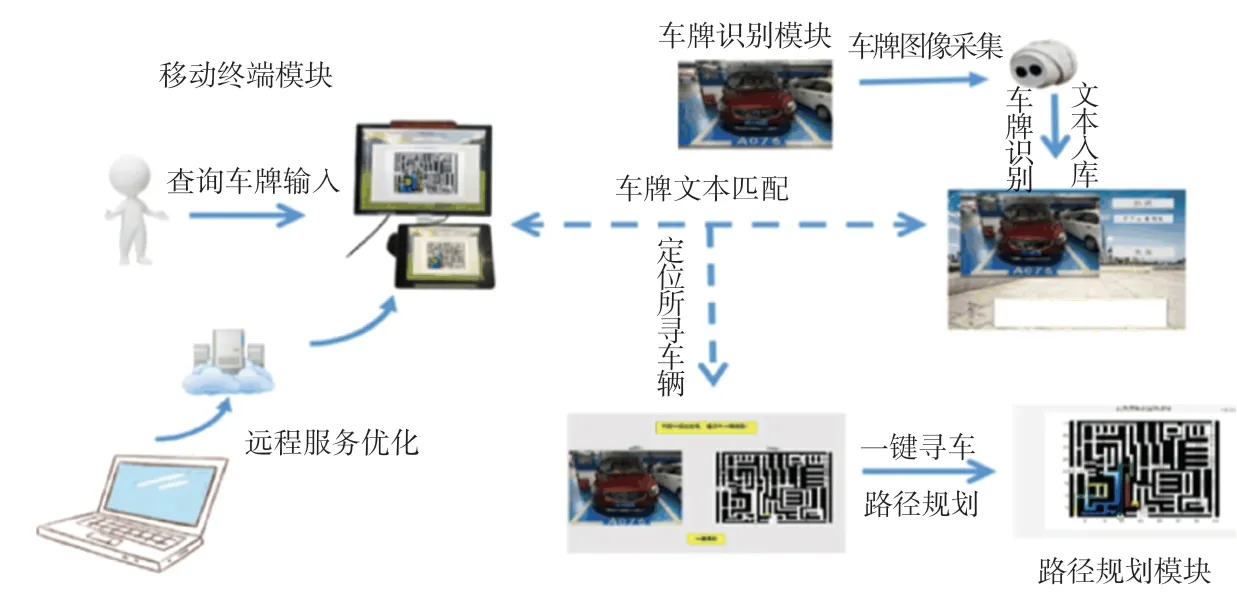
圖2 系統總體流程圖Fig.2 Overall flowchart of the system
2 車牌識別模塊在系統中的實現
車牌識別模塊分為車牌檢測與字符識別兩個步驟,本文選取YOLO模型作為車牌檢測框架,在YOLOv3網絡的基礎上進行優化,設計了YOLO_D網絡。在字符識別部分,本文借鑒OCR在處理網絡和數據技術任務中已經廣泛應用的CRNN網絡模型,對其中的相關網絡信號輸入和數據框架結構等設計方法進行了一些設計改進,構建了一種直接從網絡數據庫圖像識別到網絡信號處理字符串的網絡端到端和終點字符識別網絡模型,即CRNN_D。
2.1 基于YOLO的車牌檢測算法
車牌檢測是在包含6 500張圖片的SVM2數據集上進行的,由于系統車牌識別模塊的檢測對象只有車牌,而國內機動車車牌具有更高的辨認性和較強的顏色與形態學特征,并且由于車輛在攝像頭拍照時的位置和距離是相對固定的,因此檢測到的車牌位置和像素變化較小。所以本文通過簡化YOLOv3的網絡框架,從而提升檢測的準確性與效率。主要的改進是用單層卷積神經網絡來替換YOLOv3原文中DarkNet53的主干框架,并且僅保存了YOLO的單尺度輸出,同時還在網絡輸出前加入2個注意力模塊,組成CBAM網絡。修改后的網絡架構,如圖3所示。
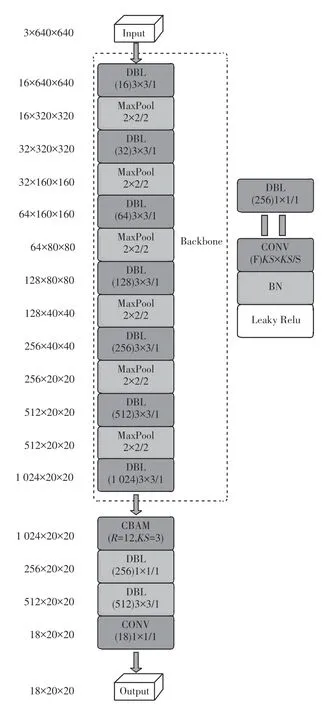
圖3 YOLO_D網絡結構圖Fig.3 YOLO_D network structure
2.2 基于深度學習方法的字符識別算法
傳統的字符識別方法通常識別精度較低,本文在CRNN模型的基礎上,通過改進網絡輸入和結構,直接從圖像到字符串構建了端到端的字符識別模型CRNN_D。通過實驗證明,改進模型在少量計算的情況下達到了96.83%的準確率,符合場景應用的標準,CRNN_D網絡主體結構如圖4所示,主要由4部分構成。
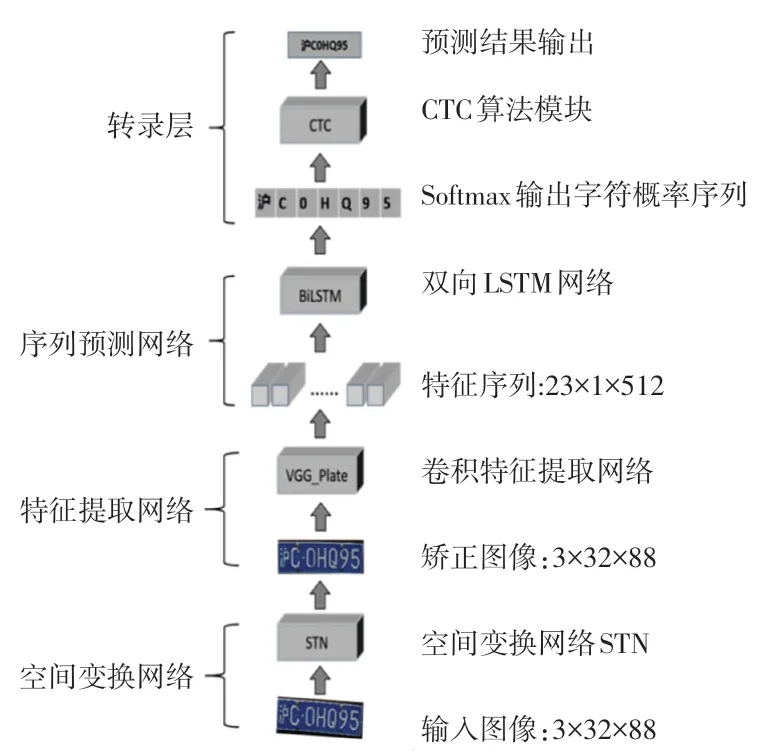
圖4 CRNN_D網絡結構圖Fig.4 CRNN_D network structure
由圖4可知,因為每一個車牌都具有特定的顏色,因此本文將原網絡中灰度圖像輸入部分改進成為3×32×88的彩色圖像輸入,并且將卷積特征提取網絡的輸入通道修改成3。通過對網絡模型中輸入的選擇和調整,可以讓識別車牌文本的準確性獲得大致約3%的提高。另外當字符傾斜較大時會嚴重影響辨識的精度,所以在空間矯正部分,本文在特征提取前,加入STN網絡,對其中所輸入的圖像進行了預校正,對輸入的數據進行空間變化,提高識別的精度。通過測試實驗證明,改進后的網絡架構使得模型的辨識精度和準確性獲得了約6%的提高。
3 路徑規劃在系統中的實現
3.1 Q-Star算法基本內容和原理
本文路徑規劃算法是基于A算法來進行改進,A算法是一種啟發式搜索算法。A算法的基本原理是先評估每個搜索位置,找到最佳位置,再從這個位置搜索到目標。這樣一來就省略了不必要的搜索路徑,直接提高了路徑規劃的效率。傳統的A算法的總代價計算公式為:

本文將2個方格間的距離設為相同的值:由于停車場環境的獨特性,可以將2個沒有障礙物的方格間的距離設為相同數值。進而將傳統的A算法,優化為動態衡量啟發式A算法—Q-Star算法。與A算法不同的是,本文算法中()變成了()*(),其中的()會影響估計值。在路徑規劃過程中,可以通過改變()來進行調整,就如公式(1)中的()對A算法的影響。分析可知,()越大,越趨近于BFS算法,而()相對越小,則相對于趨近于Dijkstra算法,這就是本文提出的Q-Star算法優化的重點所在。
3.2 Q-Star算法特點
(1)增加值,如上文所述在初始參數中增加了()的權重系數,通過這個系數的大小就可以控制路徑規劃的行為,本文利用循環進行迭代來尋找終止點,尋找到最優點的方案。
(2)進行拐角優化,分析發現無論是原本的A算法、還是傳統的動態衡量啟發式的算法,由其找出來的路徑只是數學上的最優路徑,一些轉彎是完全可以省去的,而Q-Star算法在保證不增加路程的基礎上盡量減少了轉彎次數,從而提高路徑規劃的效率。算法優化后的示意圖如圖5所示。
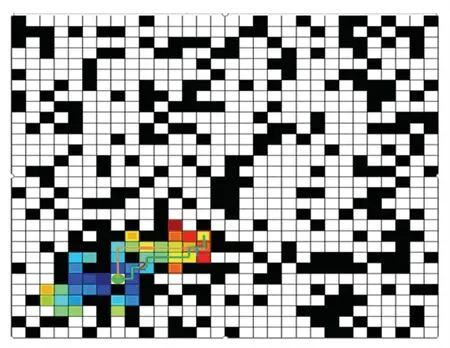
圖5 算法優化示意圖Fig.5 Algorithm optimization diagram
4 結果與分析
4.1 系統界面展示
(1)系統操作界面。研發得到的系統移動終端操作界面見圖6。
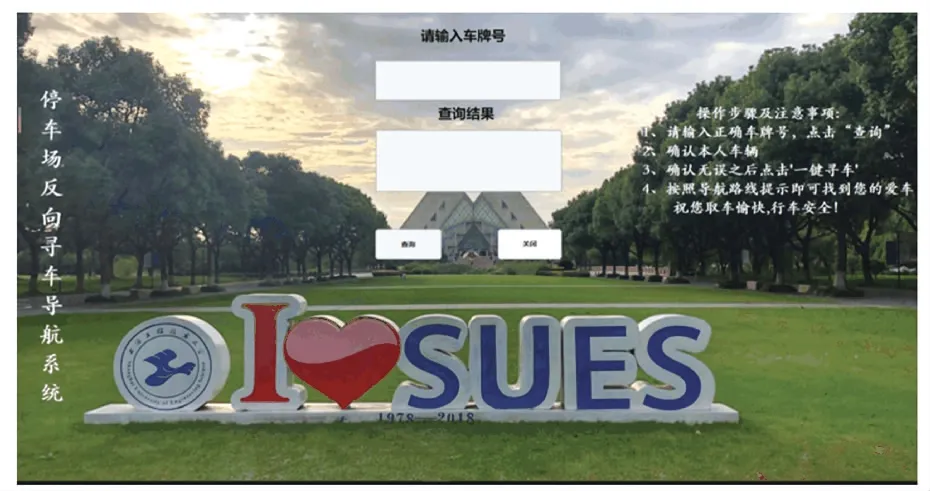
圖6 系統移動終端操作界面Fig.6 Mobile terminal operation page of the system
(2)車輛定位界面。研發得到的車輛定位界面見圖7。

圖7 車輛定位界面Fig.7 Location page of the vehicle
(3)最短路徑規劃界面。研發得到的系統最短路徑規劃界面見圖8。
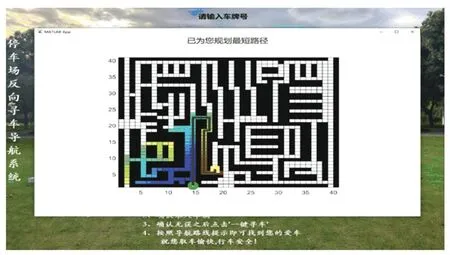
圖8 系統最短路徑規劃界面Fig.8 Shortest path planning page of the system
(4)車牌識別界面。研發得到的車牌識別界面及結果詳見圖9、圖10。
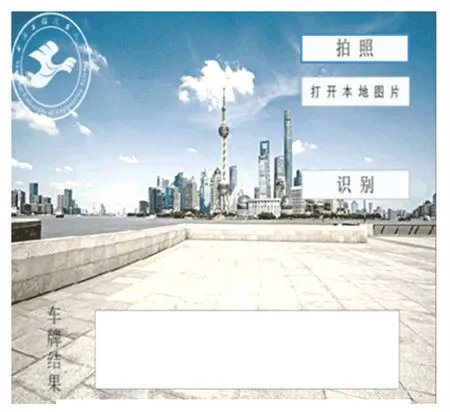
圖9 車牌識別界面Fig.9 License plate recognition page
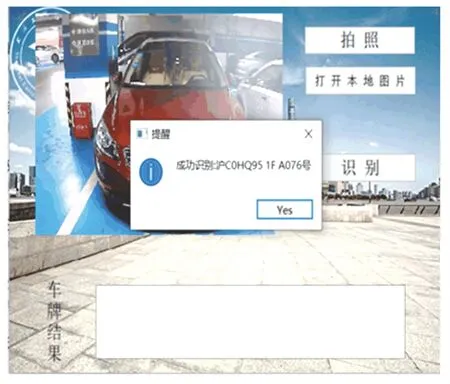
圖10 車牌識別結果Fig.10 License plate recognition results
4.2 系統測試及誤差分析
(1)車牌識別效果驗證。車牌識別模塊結合YOLO_D和CRNN_D車牌識別網絡模型,在測試集上與傳統算法進行測試,對比實驗結果見表1。結果表明,本文改進的車牌識別算法的識別準確率達到了96.86%,較傳統算法的準確率提高 了29.7%,并且檢測圖片時長大幅縮短,僅用時15.66 ms,滿足實時檢測的時間要求。
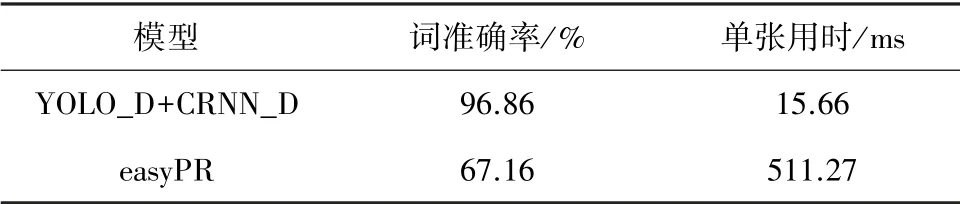
表1 車牌識別實驗結果Tab.1 Experimental results of license plate recognition
(2)路徑規劃算法效果驗證。基于Matlab軟件,對傳統的A算法和Q-Star算法進行搜索測試對比,將傳統的A算法文件命名為A_ROAD_book02.m,Q-Star算法文件命名為A_ROAD_book03.m,運行并計時的結果對比如圖11、圖12所示。
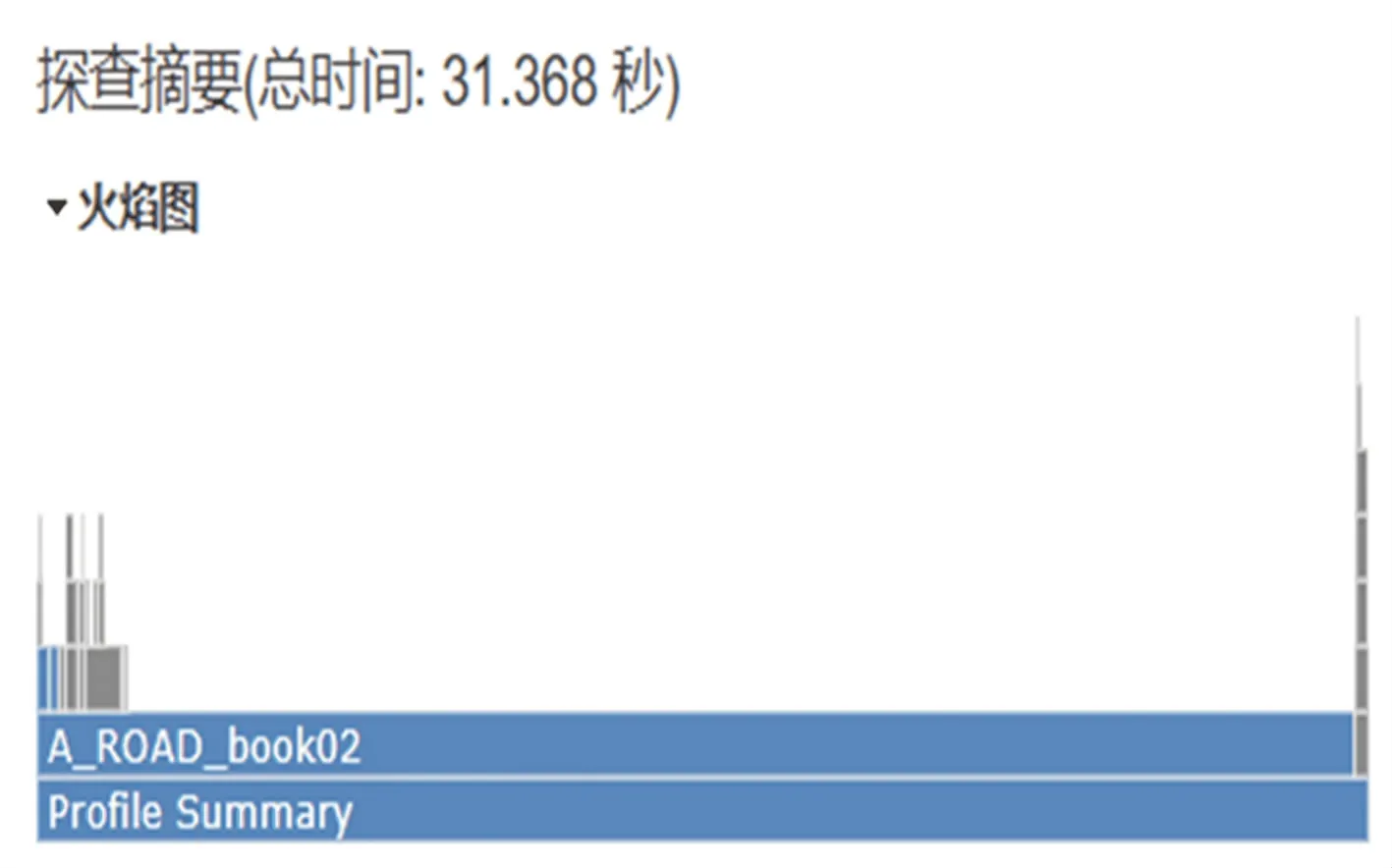
圖11 傳統A*算法火焰圖Fig.11 Flame diagram of the traditional A*algorithm
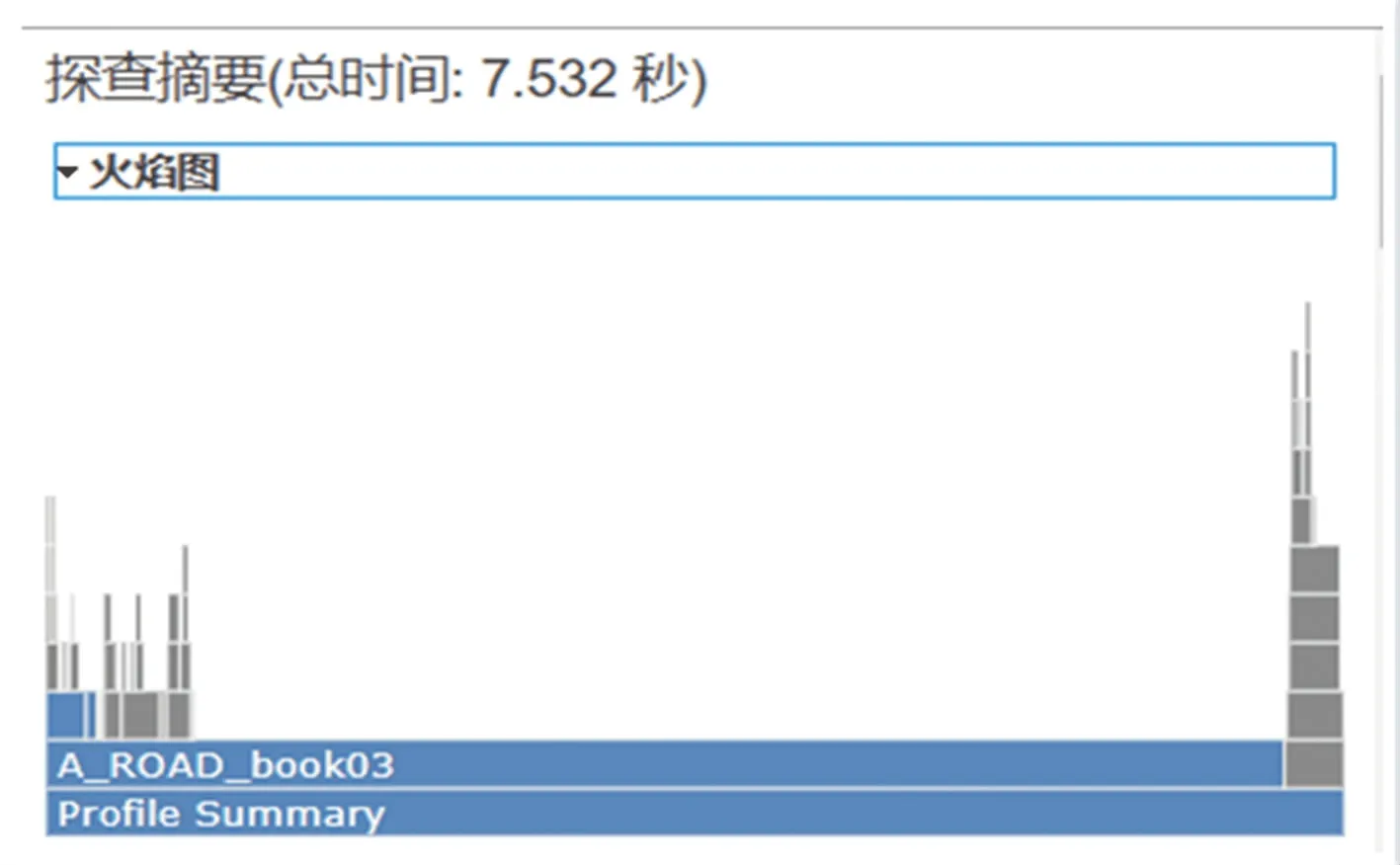
圖12 Q-Star算法火焰圖Fig.12 Flame diagram of the Q-star algorithm
如上述進行的A算法與Q-Star算法的實驗對比,通過對比結果可知,在相同的條件下,對同一目標進行搜索與路徑規劃,A算法平均需要用時31.87 s,相比之下,Q-Star算法則只需7.53 s,其搜索目標和規劃的效率是傳統A算法的4.23倍。研究中又對2種算法的路徑規劃準確度進行了同等條件下的實驗,路徑規劃算法實驗結果見表2。結果表明,Q-Star算法所規劃路徑的成功率遠高于傳統A算法,其成功率對比為95.4%∶54.6%。

表2 路徑規劃算法實驗結果Tab.2 Experimental results of the path planning algorithms
5 結束語
本文基于機器學習,設計了一款人機交互型便民服務的復雜地下停車場智能尋車系統,系統車牌檢測模塊算法通過在前人基礎上改進并提出了YOLO_D和CRNN_D模型,這2種模型的提出有效提高了車牌識別的速度和準確性,其魯棒性也得到了極大的提升,確保了系統的快速穩定運行。而在路徑規劃模塊中,本文基于多種路徑規劃算法改進成Q-Star算法,使得路徑搜索效率遠高于傳統的A算法,并且改進后的算法,路徑規劃的準確率高達95.4%,確保該系統在復雜地下停車場內使用中能夠滿足用戶的需求。最終,將兩大系統集成為一個人機交互系統,并研發制作了用戶界面,簡化用戶操作使用流程,能夠使用戶無障礙式上手該系統,有利于該智能尋車系統未來的推廣使用,更好地服務于社會,解決“停車難”與“尋車難”的問題。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代陜西(2020年13期)2020-08-24 08:22:02
領導決策信息(2018年50期)2018-02-22 06:17:16
制造技術與機床(2017年5期)2018-01-19 02:49:17
家庭影院技術(2017年9期)2017-09-26 03:41:45
商周刊(2017年5期)2017-08-22 03:35:26
濰坊學院學報(2016年2期)2016-12-01 13:00:11
中國衛生(2016年2期)2016-11-12 13:22:16