考慮自動駕駛車隊的高速公路雙車道混合交通流行駛模型
2022-05-27 06:54:42胡晨曦王嘉文李少波
智能計算機與應用 2022年5期
關鍵詞:模型
胡晨曦,韓 印,王嘉文,李少波
(上海理工大學 管理學院,上海 200093)
0 引 言
自動駕駛是車輛作為運載工具發展到一定階段的產物,是智能交通產業發展的核心,相較于人工駕駛車輛(Human Driven Vehicles,HDVs),自動駕駛車輛(Autonomous Vehicles,AVs)能夠依靠車載探測設備,實時獲取前后車輛的運動狀態信息,從而使車與車之間相互聯系并組成車隊進行行駛,車隊行駛相較單個車輛行駛能夠更好地達到節約資源、減少碳排放以及有效地利用道路資源的目的。2019年,中共中央、國務院印發的《交通強國建設綱要》明確提出要加強智能網聯汽車(智能汽車、自動駕駛、車路協同)研發,這也代表著人們會逐步接受并選購自動駕駛車輛,但在自動駕駛車輛能夠完全替換人工駕駛車輛之前,會存在一段混合交通流(Mixed Traffic Flow,MTF),也就是自動駕駛車輛和人工駕駛車輛混合行駛的過渡期,如何保證在這段過渡時期內車輛能夠安全有效行駛具有很重要的意義。
車隊的概念隨著自動駕駛技術不斷提高而被提出,Zhou等人從道路通行能力和交通穩定性2個方面揭示了車隊長度變化對交通流運行所帶來的影響。Wu等人建立了車隊內部車輛場勢來描述車輛周邊的風險分布,同時設計了車隊換道的過程,并在此基礎上提出了車隊換道臨界距離模型;Sun等人的研究以車隊效益最大化為目標,確定了一種利益重新分配機制,以激勵車輛組成車隊進行行駛。Li等人將圖論和場勢論相結合,實現了車隊的編隊以及行駛的優化。
關于車輛位于MTF中該如何進行行駛,許多學者也對此做了研究,宗芳等人建立了適用于網聯自動駕駛車輛、自動駕駛車輛、人工駕駛車輛3種類型車輛的混流跟馳模型。梁軍等人面向未來混行交通環境,結合交通工程中人、車、路等要素設計了基于多智能體系統的網聯自動駕駛車輛集聚控制模型。Amirgholy等人提出一種在MTF背景下的最佳車道管理策略。楊達等人研究了在車聯網環境下的自動駕駛車輛車道選擇決策模型。
綜上,目前國內外學者積累了很多有關自動駕駛車隊以及混合交通流的研究成果。然而針對于自動駕駛車隊的研究,大多以如何形成車隊為目的,沒有考慮形成車隊后車隊內部車輛該如何行駛,同時針對于混合交通流的研究,大多是以車輛個體為研究對象,很少能將車隊這一概念融入進去。
為了彌補以上空白,本文主要做出以下3點貢獻:
(1)建立了一個自動駕駛車輛集聚模型,其換道模型使AVs之間能相互聯系組成車隊,其跟馳模型使得車隊內部的車輛能夠更加迅速地集聚和行駛。
(2)利用元胞自動機模型搭建了一個高速公路雙車道平臺。
(3)將自動駕駛車輛集聚模型與無策略模型的性能進行對比分析,通過道路通行效率以及交通擁堵率兩個指標進行比較可以得出自動駕駛車輛集聚模型更具有優勢。
1 問題描述
本文實現的具體場景如圖1所示。圖1中的場景為雙車道高速公路,在道路中行駛著AVs及HDVs,其中黑色小車代表AVs,白色小車代表HDVs,AVs之間相互聯系并形成車隊進行行駛,HDVs則僅僅根據自身情況判斷進行行駛。
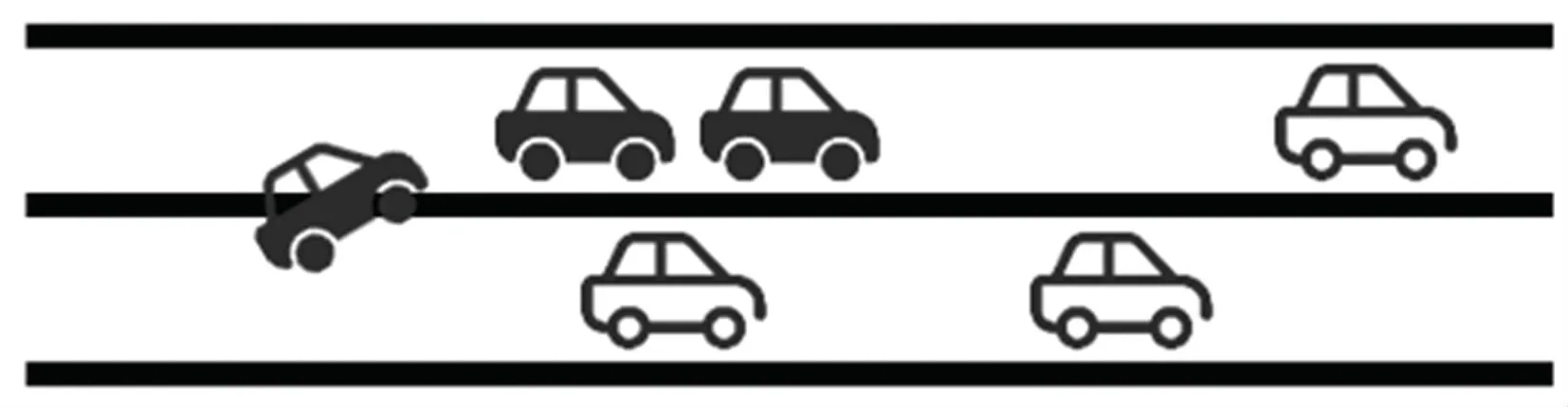
圖1 高速公路單向雙車道上的混合車流Fig.1 Mixed traffic on two-lane expressway
本文利用了元胞自動機模型對這種有AVs集聚行駛行為的MTF進行了仿真模擬,元胞自動機(Cellular Automata,CA)最早是由馮·諾依曼(J.von Neumann)提出的一種模擬生命系統復制功能的網格動力學模型。元胞自動機本質上是一種離散的模型,而交通元素從本質上來講也是離散的,因此利用元胞自動機模型對交通進行研究擁有著先天的優勢,本文將通過元胞自動機構建單向雙車道高速公路的仿真環境。關鍵參數示意圖如圖2所示。模型的整體公式如下所示:
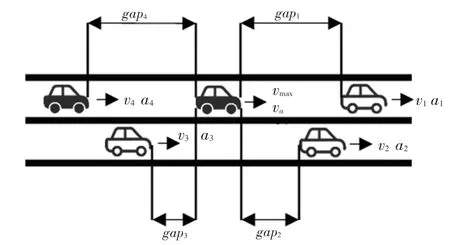
圖2 關鍵參數示意圖Fig.2 Key parameters schematic diagram
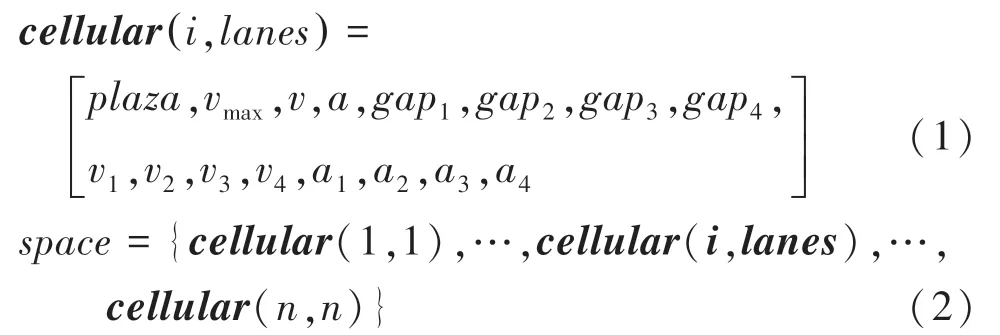
其中,(,)為一個位于第條道路第個元胞的狀態;為車輛類型;為車輛最大車速;為車輛瞬時車速;為車輛瞬時加速度;為當前車道車輛與當前車道前車之間的距離;為當前車道車輛與相鄰車道前車之間距離;為當前車道車輛與相鄰車道后車之間的距離;為當前車道車輛與當前車道后車之間的距離;為當前車道車輛前車的瞬時車速;為相鄰車道前車的瞬時車速;為相鄰車道后車的瞬時車速;為當前車道后車的瞬時車速;為當前車道車輛前車的瞬時加速度;為相鄰車道前車的瞬時加速度;為相鄰車道后車的瞬時加速度;為當前車道后車的瞬時加速度;為整個元胞空間內所有元胞的集合。
2 模型建立
2.1 換道模型
車輛換道(Lane Changing,LC)指的是車輛因駕駛員的一種決策從一條車道更換到另一條車道的一種行為,而換道模型則是利用數學語言對這種行為的抽象化表達。換道模型的建立主要包含2個方面。一是換道決策模型,二是換道實施模型。其中,換道決策模型主要通過所獲得的道路上交通信息來對車道進行選擇。換道實施模型指的是車輛在執行換道的過程中與其他車輛發生交互。本文擬著重對換道的決策部分進行討論,弱化換道具體實施部分,所以選用了不考慮換道細節的元胞自動機模型。
根據以往的換道決策模型研究可以發現,車輛是否決定換道與前后車輛以及相鄰車道車輛的瞬時狀態有關,包括位置、間隙、速度和加速度。
對此,Jin等人建立了一種以當前位置的車輛能在未來獲得一個更遠的移動空間為動機的換道模型,以下將該模型稱為未來決策換道模型,具體模型如下所示:

當前車道前方的車輛在下個時間步長內所移動的距離若小于相鄰車道前方車輛在下一個時間步長內所移動的距離就執行換道,反之則不進行換道。本文在該模型的基礎上考慮了車輛加速度對換道決策的影響,所做的修改如下所示:

在滿足該模型的基礎上,會有以下4種可能:
其中,式(5)的類型是最適合進行換道,而式(8)的類型是最不適合進行換道。本文的目標是使AVs能夠形成車隊進行行駛,因此根據這個特性來為AVs和HDVs制定2種不同的換道策略模型。針對于HDVs的換道策略規則模型如下所示:
若HDVs滿足以上條件,車輛就執行換道,本文將其稱為None策略模型。而在以上條件的基礎上,AVs考慮了式(7)的類型和式(8)的類型,若AVs相鄰車道前方3個元胞長度內存在其他AVs,那么車輛也會執行換道,本文將其稱為自動駕駛車輛集聚策略模型(Autonomous Vehicle Gather),簡稱AVG策略模型。現給出本文模型的數學表述如下:
條件一:
條件二:
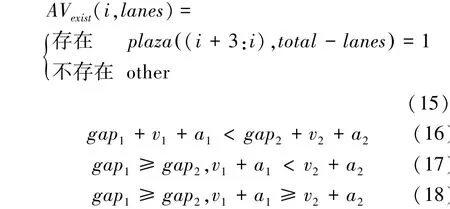
其中,AV為用于判斷目標車輛的相鄰車道3給元胞長度內是否存在其他AVs;取值為1代表著自動駕駛車輛,取值為2代表人工駕駛車輛;為計算相鄰車道的一個數值。只要滿足該模型中的任意一個條件都可以進行換道。
2.2 跟馳模型
車輛跟馳(Car Following)可以理解為跟馳車輛在縱向上的相互作用,車輛跟馳模型可以從交通工程的角度以及統計物理的角度進行劃分。從統計物理的角度去考慮,針對道路上運行的混合車流,參考了Nagel等人對初等元胞自動機184號規則進行推廣所得的NaSch模型,并將該模型應用于MTF車輛之間的跟馳現象,同時本文也考慮了AVs集聚形成車隊后,車隊車輛之間的跟馳情況,并利用NaSch模型來解釋這種跟馳現象。
NaSch模型規定從時刻到1時刻的過程中,車輛按照以下4個步驟進行演化:
加速規則。道路上的車輛在一個仿真步長時間之內,按照不同車流密度下的隨機概率的不同來對車輛進行加速,其中車流密度越大,加速的可能性越小。
減速規則。道路上的車輛因前車的速度無法滿足自身需求而選擇減速。
隨機慢化規則。道路上的車輛因各種隨機因素干擾而造成的車輛減速行為,其隨機慢化的概率受車間距離以及自身車速的影響。
運動規則。車輛根據調整后的車速在下一個仿真時間點對位置進行調整。車輛跟馳模型的加速減速規則如下所示:
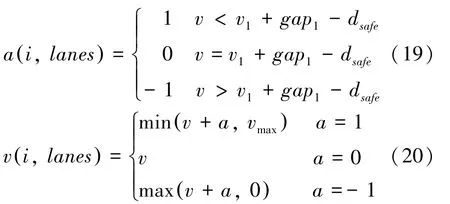
其中,(,)為當前車輛的加速度,判斷當前車速與前車車速和與前車之間的距離之和相比較,可以將速度狀態標記為加速、減速以及保持速度不變;(,)為當前車輛根據(,)值的不同而選擇不同的速度變化形式;d為車與車之間的安全距離。
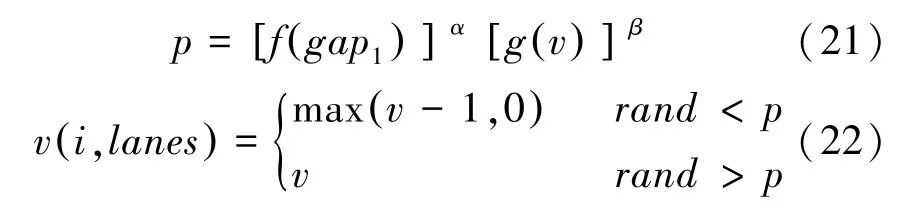
車輛跟馳模型的隨機慢化規則如下所示:
車輛跟馳模型的運動規則如下所示:
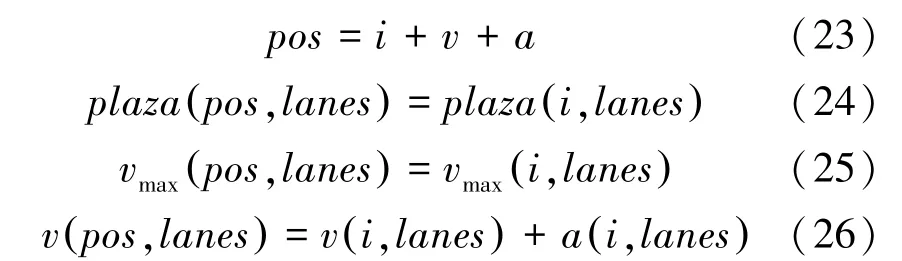
其中,為下一個時間點更新后的元胞位置,其值等于當前時間點的位置加上當前時間點的速度;(,)、(,)、(,)以及(,)為更新后的數值。
由于AVs相較于HDVs具有更好的可控性,依據該特性可以在AVG策略模型的基礎上建立一個AVs車隊內部車輛跟馳模型,車隊內的車輛以領頭的車輛為目標,將自身的車速逐步向領頭車輛的車速以及車輛的位置靠攏,而領頭的車輛則根據原本的跟馳模型來調整自身的車速,AVs車隊內車輛跟馳模型數學公式具體如下:
其中,v為車隊中領頭車輛的瞬時車速;gap為車隊中目標車輛距離領頭車輛的距離; 為車隊中領頭車輛的最大車速。跟馳模型的運動規則跟前文相同。
3 實驗仿真與評價
3.1 仿真平臺的建立
為了研究混合交通車流在2種不同的策略下的表現情況,選用了Matlab2017a進行建模以及仿真。
本文利用元胞自動機所建立的仿真平臺為雙車道高速公路,因此根據仿真需求建立一個4*的元胞空間,包含2條車道及2條邊界,其中元胞空間的邊界不允許車輛行駛。根據標準小汽車長度為5 m,以及為了避免車與車之間前后相互緊挨著需要給車輛前后一個自由活動空間,因此將單個元胞長度設置為7.5 m,同時根據國內高速公路道路寬度標準規范規定高速公路每個車道的寬度應為3.75 m,故將單個元胞寬度設置為3.75 m。每一個元胞都包含著一些信息,研究中利用的取值代表該處元胞所處的一個狀態,若該處元胞存在AV,那么1,若該處元胞存在HDV,那么2,若該元胞不存在任何車輛,那么0。當該處元胞狀態為存在車輛,則賦予該處元胞最大車速以及利用最大車速所生成的當前車速,同時也賦予該處元胞一個初始加速度。在元胞空間生成初始車輛之后,計算每一輛車的其余參數周邊車輛的速度、加速度以及和周邊車輛的距離。
本文所設置的2種不同的換道策略均在元胞空間內完成仿真,每次運行1 000個時間步長,文中所設置的時間步長為Matlab仿真時間的1 s,為了保證最終效果的可靠性,每一個策略均在生成不同初始車流的情況下迭代100次,求得的結果取100次迭代平均值。同時為了研究不同車流密度以及不同AVs滲透率情況下對整個交通流狀態的影響,本文設置了對比實驗,AVs的滲透率指代自動駕駛車輛占總的車輛的比例。
3.2 道路通行效率分析
為了分析不同密度下的混合車流的整體通行效率,本文通過人工控制調節車流密度以及AVs的滲透率,通過數據處理分析得到了密度-速度曲線圖以及密度-流量曲線圖,見圖3。
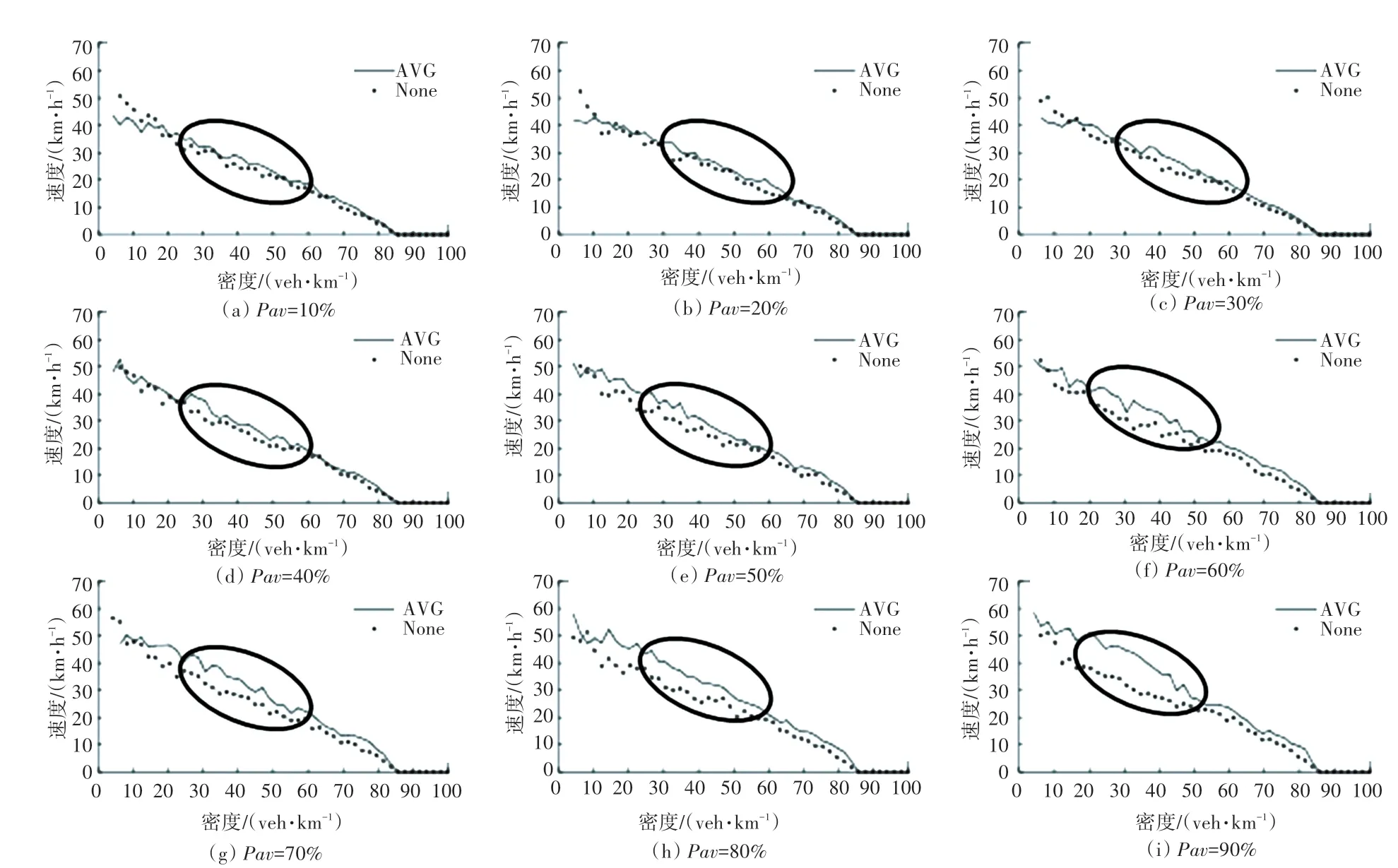
圖3 混合交通流密度-速度圖Fig.3 Mixed traffic density-velocity diagram
3.2.1 密度-速度
由圖3中可以看出,隨著密度的逐漸上升,速度呈現出一種遞減的趨勢,從初期的自由流到末期的阻塞流,MTF的平均車速從最大值到零,本文構建的模型符合實際的交通流狀況。對比2種不同的策略,在AVs的滲透率處在30%以下時,兩者的差異不大,當AVs的滲透率超過40%以后,AVG策略的優勢就逐步體現出來,隨著AVs比例增多,這種優勢也就愈發明顯。
3.2.2 密度-流量
相較于密度-速度折線圖,密度-流量折線就更加直觀。混合交通流密度-流量圖如圖4所示。通過觀察圖4發現,2種策略下的MTF均在密度達到40 veh/km至50 veh/km之間,交通量達到頂峰,并在達到頂峰之后呈現下降的趨勢。同樣與密度-速度曲線圖分析的結果相同,當AVs的滲透率超過了40%之后,AVG策略的優勢將漸漸地體現出來,并在道路上的AVs滲透率達到最大時,AVG策略的優勢將拉到最大。
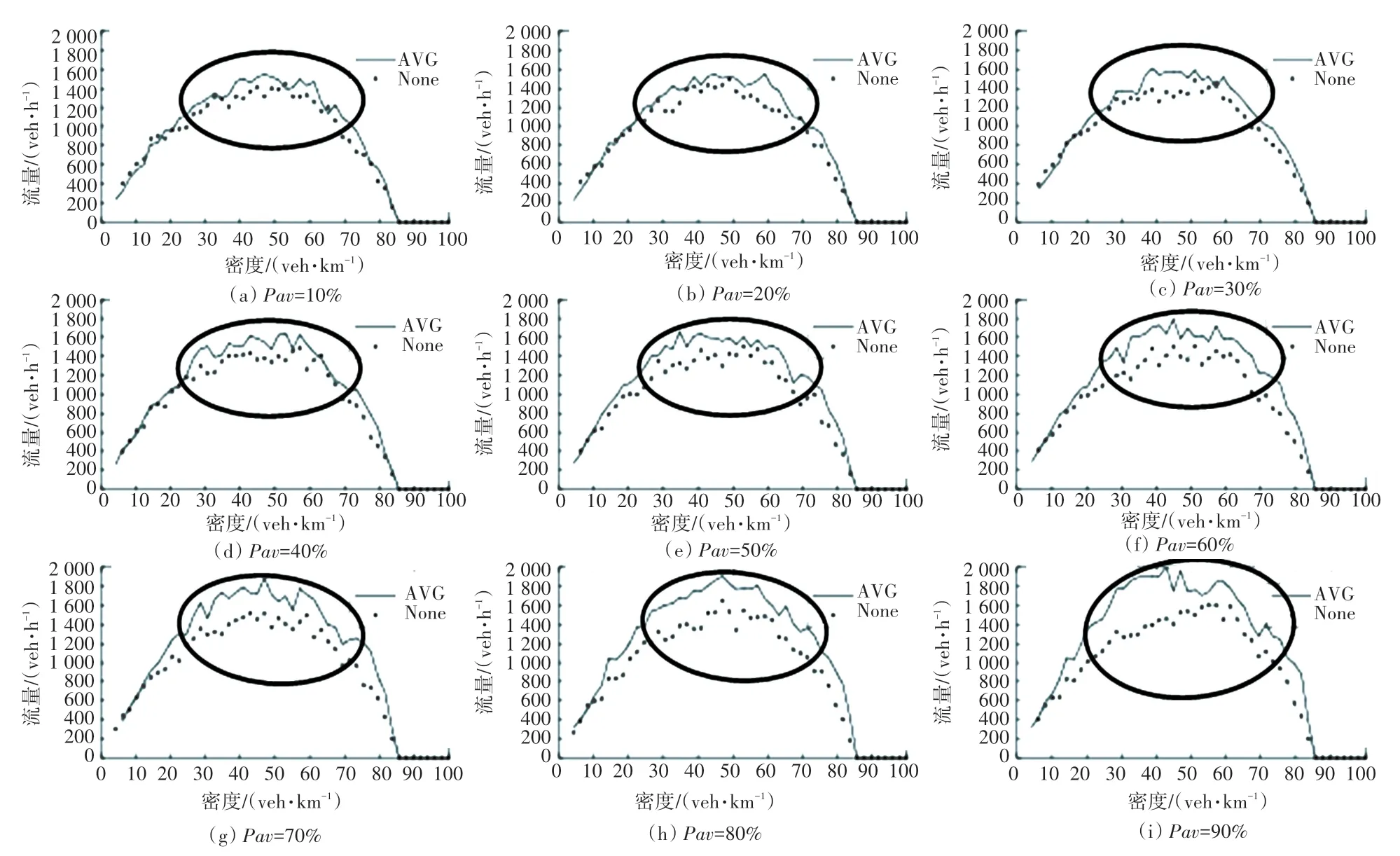
圖4 混合交通流密度-流量圖Fig.4 Mixed traffic density-flow diagram
3.3 交通擁堵分析
交通擁堵是一種車多且車速緩慢的交通現象,為了能將這一指標在MTF中所體現,本文將車速小于2元胞長度/s的車輛定義為處在擁擠的車輛,利用擁擠的車輛在整體交通流中所占的比例來代表交通流的擁擠程度。利用如下公式對交通擁堵比例進行計算:

其中,R表示車輛擁堵的比例;N表示在每一個時間步長內擁堵的車輛數;表示總的時間步長;表示車輛的總數。
計算不同AV滲透率以及不同密度下的R,并將其進行可視化展示,如圖5所示。圖中,顏色越偏白色、代表其擁堵的程度越低,顏色越偏黑色、代表其擁堵程度越高。
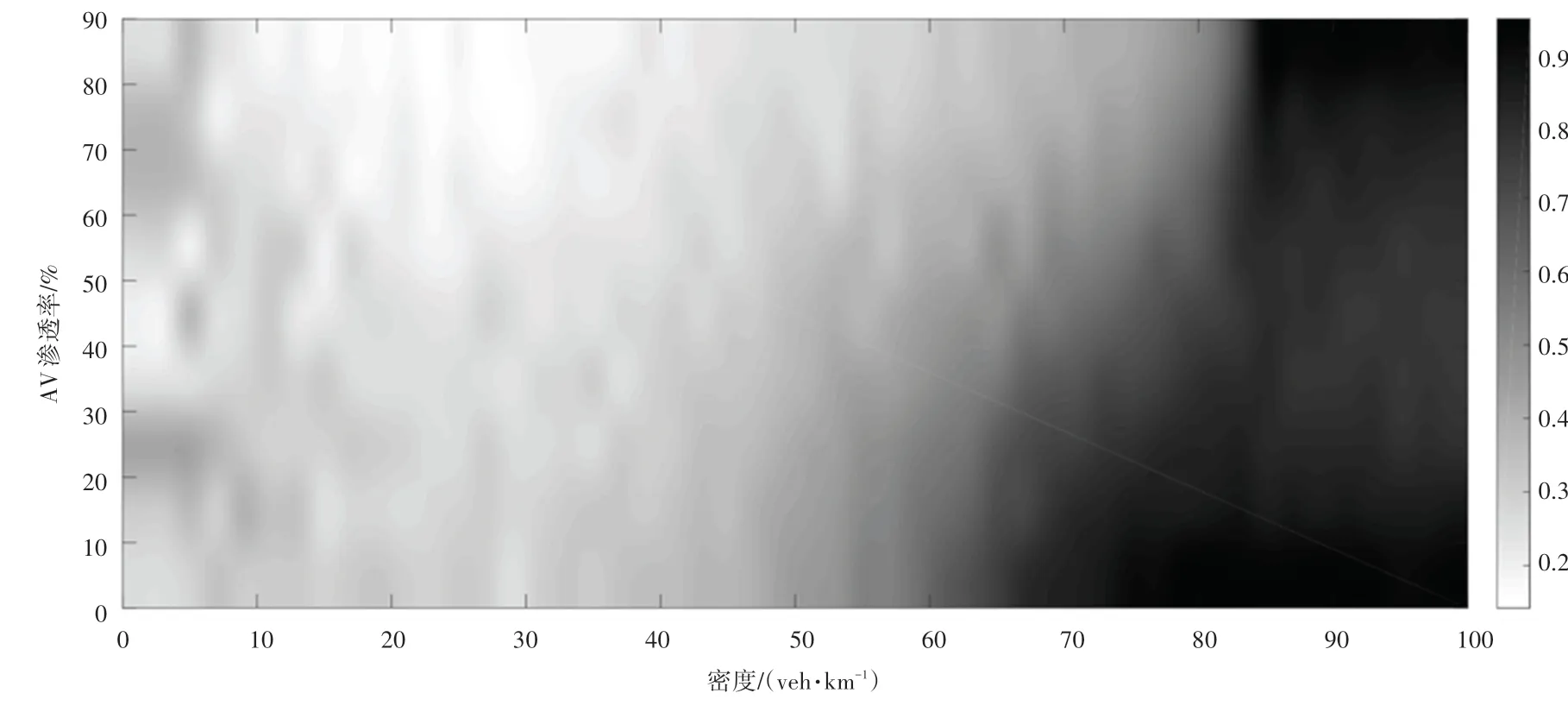
圖5 交通擁堵分析圖Fig.5 Traffic congestion analysis diagram
從橫向上來對交通擁堵圖進行分析,當密度處于0~40 veh/km之間時,交通流正處于一個自由流狀態,所以其顏色變化的效果不明顯,當密度超過40 veh/km以后,交通擁堵程度會隨著密度的增大而增大。從縱向上來對交通擁堵圖進行分析,隨著AV滲透率的增大,可以明顯發現交通的擁堵程度正在下降,但是當密度超過80 veh/km以后,交通流將處在一個飽和的狀態,這種優勢將不再存在。
4 結束語
本文在對自動駕駛車輛特性分析的基礎上建立了AVG策略模型,該模型考慮了車輛換道與車輛跟馳兩個方面,并在換道模型中融入了AVs集聚概念,還在跟馳模型中考慮了AVs形成車隊后車隊內車輛的跟馳行為,接著利用元胞自動機模型搭建了一個高速公路雙車道模型,最后與None策略模型進行對比,分析不同AV滲透率下和不同MTF密度下所得到的道路通行效率以及交通擁堵程度,可以得出AVG策略模型在MTF中相較于None策略模型來說擁有著更好的優勢,尤其是當AV滲透率超過40%以上,MTF密度在40 veh/km到50 veh/km的區間時,這種優勢將愈發明顯。同時,本文也對交通擁堵特性進行了分析,可以得出在相同的MTF密度條件下隨著AV滲透率的增大MTF愈發不擁堵。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19