數據驅動的故障預測方法研究
2022-05-24 03:25:14李曉猛付一博焦瑞華
測控技術 2022年5期
李 磊,李曉猛,付一博,焦瑞華
(航空工業西安航空制動科技有限公司,陜西 西安 710048)
隨著科學技術的不斷發展,航空、航天、通信、電子和化工等多個領域的設備日趨復雜和智能,設備使用環境逐漸苛刻,使用強度不斷提高,加重了腐蝕、疲勞等外部作用產生退化的可能性,而設備退化引起的失效問題可能會造成嚴重的人員損傷和財產損失,近年來設備的安全性保障和智能化管理的需求日趨強烈。為全面監控復雜設備的運行情況以及健康狀況,保障高效性與經濟行、安全性與可靠性,實現復雜設備的視情維修,故障預測與健康管理(Prognostic and Health Management,PHM)技術應運而生,逐漸成為可靠性領域的熱點研究方向[1-3]。PHM技術旨在通過精確預測設備壽命為維修替換、備件訂購等管理活動提供科學依據,使得系統在未完全故障階段就可提前獲取系統健康狀況,實現系統故障前的主動干預,避免被動非計劃性停機,達到降低設備過載荷使用和實現設備智能化管理等目標,故大量的專家與學者[1-4]一致認為故障預測是PHM的基礎與核心內容。
1 故障預測技術的內涵
1.1 故障預測的概念
故障預測技術通常采用先進傳感器技術,基于機理或數據模型來監測和預測設備的狀態。該技術可最大程度地利用傳統的故障特征檢測技術,并綜合先進的算法建模,來獲得虛警率幾乎為零的精確故障檢測和隔離結果[5]。從故障預測技術誕生至今,國內外科研人員給出了各式各樣不同的定義,然而其核心大多還是圍繞剩余使用壽命(Remaining Useful Life,RUL)展開,具體如表1所示。
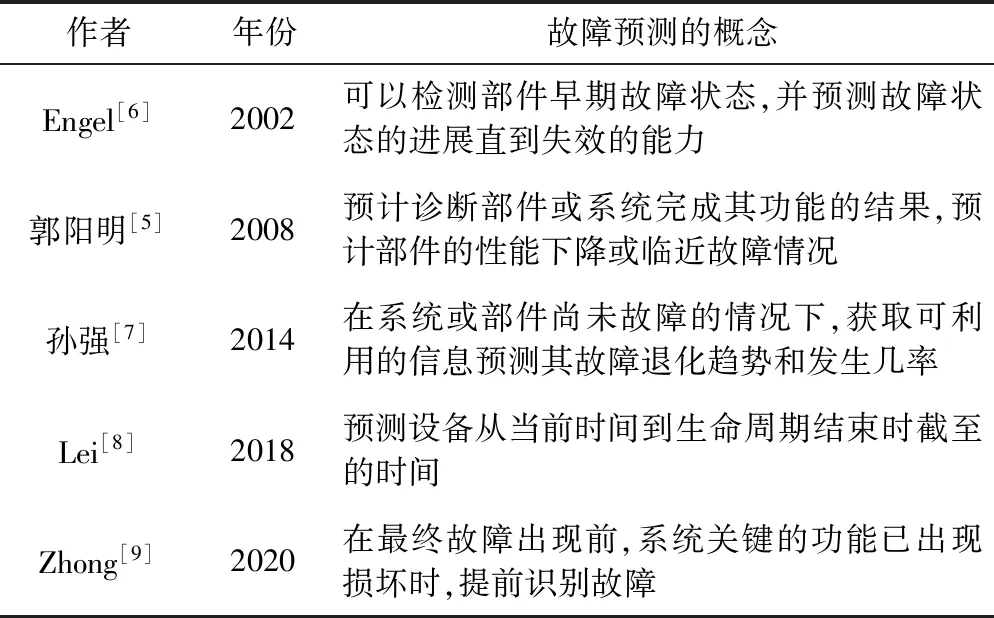
表1 故障預測的不同定義
綜合各類研究觀點,認為故障預測的要點可歸納為故障征兆辨識和剩余壽命預測。
① 故障征兆辨識指設備故障的初始特征被識別出來,與正常運轉設備特征參數有差別,但設備此時尚能夠滿足正常運轉。
② 剩余壽命預測是指從發現設備的故障征兆開始到設備最終發生故障截至時的時間,并給出盡可能精確的剩余使用壽命預測。
1.2 故障預測方法分類
現有的故障預測方法有很多種,不同的學者和研究機構對其分類略有不同,具體如表2所示。
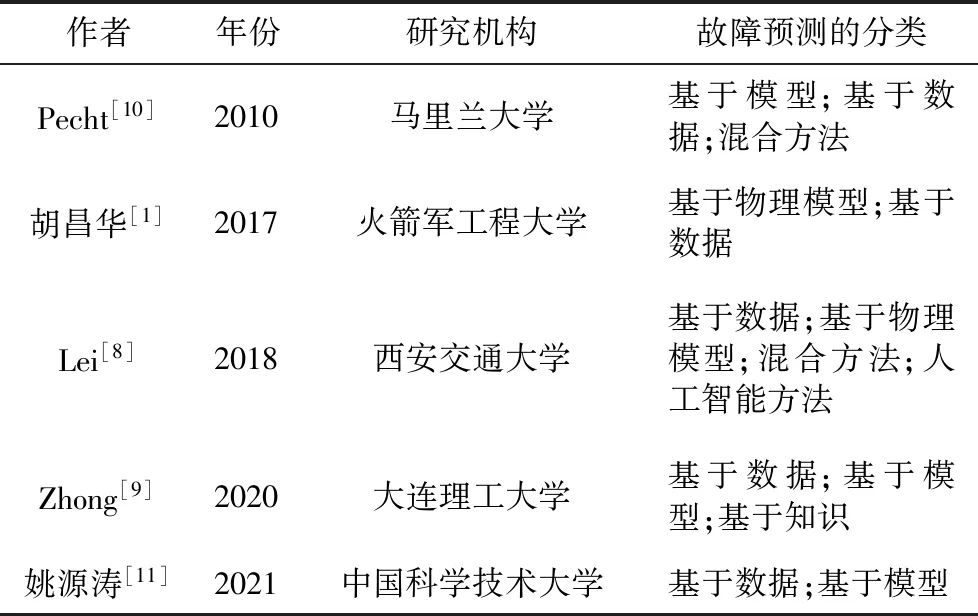
表2 故障預測的分類
結合當前被普遍認同的分類方法,將故障預測方法主要分為基于物理模型的故障預測和基于數據的故障預測。基于物理模型方法的前提是被觀測對象的數學模型是已知的,通過建立被觀測對象的失效模式和物理特性數學模型,達到識別故障征兆和預測剩余使用壽命的目的。基于數據的故障預測方法以采集到的數據為基礎,通過數據分析、處理和提取得到可利用信息,結合歷史數據中的輸入和輸出之間映射關系,完成非線性模型的建立,以期使用現有數據計算未來值,進而實現故障的成功預測。
2 基于數據的故障預測方法
基于模型的故障預測方法雖可以通過研究被觀測對象的固有特性和性質,完成對故障的實時預測和精準預測,但是基于模型的故障預測存在建模過程過于復雜的問題,使得其適用范圍并不廣泛。而基于數據驅動的故障預測方法具備的適用范圍廣、預測精度高和建模較易等優勢使其成為近年來研究的熱點與主流,累積了大量的優秀研究成果。因此,下文主要介紹基于數據的幾類主流故障預測方法,主要有:時間序列分析方法、可靠性法、隨機過程方法和人工智能方法,如圖1所示。
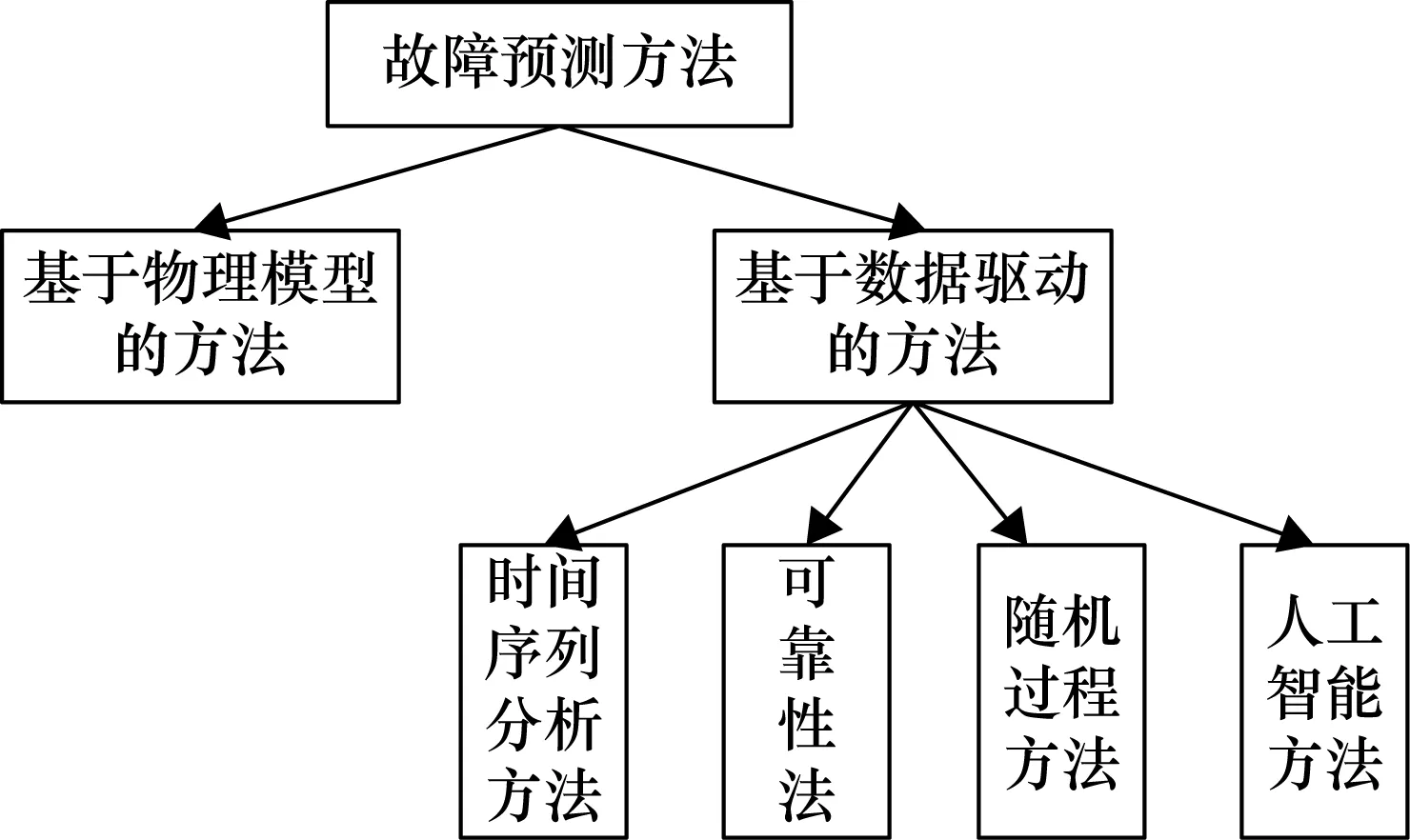
圖1 基于數據驅動的故障預測方法分類
2.1 時間序列分析方法
該方法將預測對象的歷史數據按照時間進行排列,并建立數據隨時間變化的數學模型,繼而外推至未來進行預測;或將歷史數據擬合一條曲線,預測對象隨時間變化的趨勢,估計出某時刻的預測值。介紹兩種故障預測領域常用的時間序列分析方法:灰色模型方法和自回歸滑動平均(Auto-Regressive and Moving Average,ARMA)方法。
2.1.1 灰色模型方法
灰色系統模型通常被表示為GM(n,m),其中n為微分方程的階數,m為微分方程的變量數。研究人員大多聚焦在計算效率較高的1階、1個變量的微分方程模型GM(1,1)[12-13]。Yang等[14]建立了一個基于相似信息融合的灰色模型,使用歷史樣本進行相似性匹配,應用灰色模型預測未來退化軌跡,獲取飛機發動機的剩余使用壽命。杜文然等[15]以動車組百萬公里故障數據為基礎,建立基于灰色GM(1,1)的故障率預測模型,使用等維信息灰色GM(1,1)模型進行數據更新和精度檢驗,實現對故障的精準預測。灰色模型特點是少數據建模,普遍精度高,誤差小[16]。但GM(1,1)模型的預測要求時間序列近似呈指數規律變化,且其只考慮到單個特征量的變化趨勢,在實際應用中具有局限性。
2.1.2 自回歸滑動平均方法
ARMA方法將數據視為隨機序列,結合相鄰數據之間的數學關系建立模型,進而擬合時間序列[17],傳統ARMA方法對平穩數據的預測效果良好,適用于短期預測,唐睿[18]使用歷史時間序列完成對ARMA模型的建立,得到軸承性能退化的預測曲線,擬合度可以達到96%。徐達等[19]建立ARMA和BP神經網絡組合預測模型,以某型裝甲裝備故障率數據為研究對象,故障率預測結果良好。但是AMRA方法實際運行數據一般較難滿足平穩條件,通常需對數據給出平穩性假設或進行合理變換[20]。
2.2 基于可靠性方法
基于可靠性的故障預測方法是從歷史數據的統計特性為出發點,使用近似相同的設備歷史故障數據來擬合設備的壽命分布曲線,進而獲取對應概率密度函數,求得設備平均剩余壽命。所得到的預測結果中含有置信度,能夠很好地表征預測結果的準確度。該方法適合用于批次多、數量大的設備[21]。最典型的方法就是比例風險(Proportional Hazards,PH)模型。PH模型中設備的失效率由基準失效率函數和協變量函數組成,在預測結果的同時體現了同類設備的共性屬性和個體差異。蔣文博等[22]運用PH模型結合壽命和協變量的關系,獲取累計風險函數,利用機器學習算法結合壽命數據和故障時間序列建模,所得到的壽命預測結果良好。但是PH模型需要大量的高可靠歷史數據才能完成對模型參數的推算,另外還需要失效率和協變量的差異成比例,使得其在壽命預測領域的應用并不具備廣泛適用性[23]。
2.3 基于隨機過程方法
該方法旨在通過建立隨機過程模型以獲取退化過程的曲線,進而得到剩余壽命概率分布函數。主要包括的方法有基于Wiener過程的方法、基于馬爾可夫鏈的方法、基于Gamma 過程的方法和基于逆高斯過程的方法。
2.3.1 基于Wiener過程的方法
Wiener過程又稱為帶線性漂移的布朗運動,由于其在非單調性能退化方面的良好表現,常被用于非單調退化過程的建模[24-25],目前已被廣泛應用于設備可靠性分析和壽命預測領域。趙帥[26]使用Wiener隨機過程分別對設備單調和非單調退化過程進行驅動,引入PH模型到退化過程中并對設備故障預測進行建模,通過轉移矩陣的方法完成對模型的解算和設備健康參數的求解,實現對設備故障的準確預測。董青等[27]基于自適應Wiener過程,提出了一種考慮隨機沖擊影響的非線性退化設備剩余壽命預測方法。利用正態分布描述隨機沖擊對設備退化量的影響,建立融合隨機沖擊影響的自適應Wiener過程退化模型,并應用期望最大化方法實現模型參數估計,通過數值仿真、慣性導航系統陀螺儀實例,驗證了方法的有效性和實用性。但Wiener存在過程參數的辨識需要大量的歷史數據和不適用于非線性退化建模的缺陷。
2.3.2 基于馬爾可夫鏈的方法
該方法在故障預測領域,首先需假設退化過程{X(t),t≥0}在有限的狀態空間E={0,1,2,…,M}上進行演化迭代,被觀測對象首次達到失效狀態點“M”的時間為設備的使用壽命。這種方法具備似然函數計算效率高和簡單直觀的優點,但當被觀測對象退化過程難以獲取時,隱馬爾可夫模型(Hidden Markov Model,HMM)得到了廣泛的應用,其結構示意圖如圖2所示。
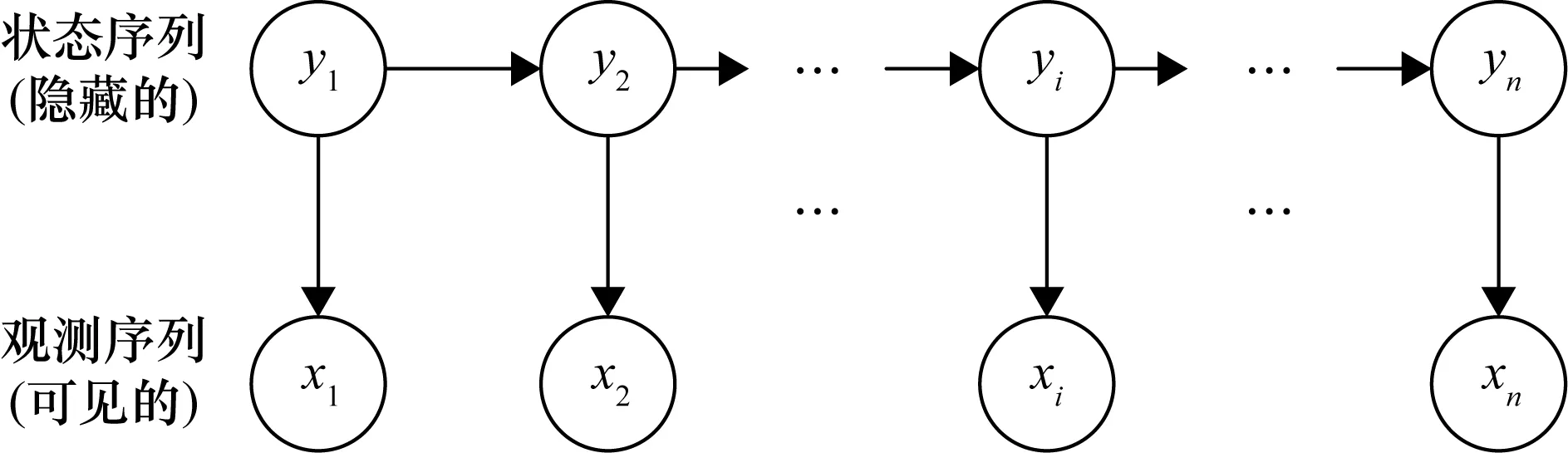
圖2 HMM的結構示意圖
HMM 模型是由兩個隨機過程生成,一個隨機過程用于描述可觀測狀態的轉移,另一個用于狀態與觀測值之間的映射關系。轉移過程通常是隨機的,其狀態對應的觀測也為隨機,所以只能通過其一隨機過程估計狀態的存在和其特性。另外,HMM模型在故障預測應用中還將被觀測對象的健康狀況劃分為“健康”、“亞健康”、“失效”等便于理解的描述方式。楊奕飛等[28]研究了基于隱馬爾科夫模型的故障模式識別方法,利用該模型將微弱變化的信號特征轉換為變化較大的對數似然概率對故障模式實現有效識別。周智利[29]提出一種基于HMM模型的轉轍機故障及剩余壽命預測方法,通過實驗獲取到的被觀測設備的故障預測結果較為良好。由于該方法的無記憶性,造成壽命預測結果僅依賴當前設備的健康狀態而不能充分利用設備運行過程的歷史數據。另外,該方法無法得到概率密度函數,進而無法對故障預測結果進行評估。其近似離散化的處理連續退化過程的方法也會存在誤差。
2.3.3 基于Gamma 過程的方法
基于 Gamma 過程的故障預測方法需要假設設備的退化模型的增量服從Gamma 分布,在預先設定好失效閾值的前提下求取失效閾值的時間就可以得到剩余壽命[30]。Gamma 隨機過程為一種單調遞增的跳躍過程,可用于設備隨機退化過程為嚴格單調的情況。高首[31]建立了基于 Gamma過程的模型描述產品的退化過程,針對激光器和鋰離子電池退化模型,創新地應用了粒子濾波算法對EM 算法中不易估計的參數值進行求解,并最終得到了相應的剩余壽命概率密度函數。李建華[32]建立了一種基于二元伽馬過程的退化模型,利用分步極大似然估計法在線更新模型參數并對設備的剩余壽命進行預測,預測精度良好。但受限于實際退化過程的無序波動性,現實退化場景往往并不嚴格遵循Gamma隨機過程的單調特性。另外,Gamma分布數學形式較為復雜,存在難以對模型的參數進行實時估計和更新的問題。
2.3.4 基于逆高斯過程的方法
與Gamma過程相似,逆高斯過程是一種具有單調性的隨機過程。其在實際應用中能夠較為方便地融入其他物理模型,在設備的可靠性評估工作中具有較為廣泛的應用前景[33-34]。王藝斐等[35]采用二元過程建立管道剩余強度性能退化量模型,基于管道剩余強度的邊緣概率密度函數,采用期望值最大化算法估計模型參數,完成管道壽命預測。吳振宇[36]基于逆高斯過程提出一種考慮個體差異和測量不確定性的加速退化模型,通過遺傳算法和蒙特卡洛積分的方法對模型參數進行求解,實現了設備的壽命預測。目前關于逆高斯過程在壽命預測中的研究相對較少,且逆高斯過程適用于退化過程單調的應用場景,在復雜退化過程的應用研究較為缺乏。
2.4 基于人工智能的方法
基于人工智能的方法首先選取若干歷史數據作為訓練樣本,再使用訓練算法對其訓練后進行故障預測。該方法避免了傳統方法較為復雜的數學模型建立和專家經驗獲取。但需要被觀測對象從起始使用到最終故障時的完整歷史數據,否則會降低預測結果的可信度。另外,由于這類方法屬于黑盒模型,這也意味著預測結果往往缺乏足夠的可解釋性。目前常用的人工智能方法有:人工神經網絡(Artificial Neural Network,ANN)、支持向量機(Support Vector Machine,SVM)和深度學習等方法。
2.4.1 基于ANN的方法
常見ANN有BP網絡、SOM網絡、RBF網絡等。故障預測中最常用的BP神經網絡是一種單向傳播的多層前向網絡,其結構如圖3所示。
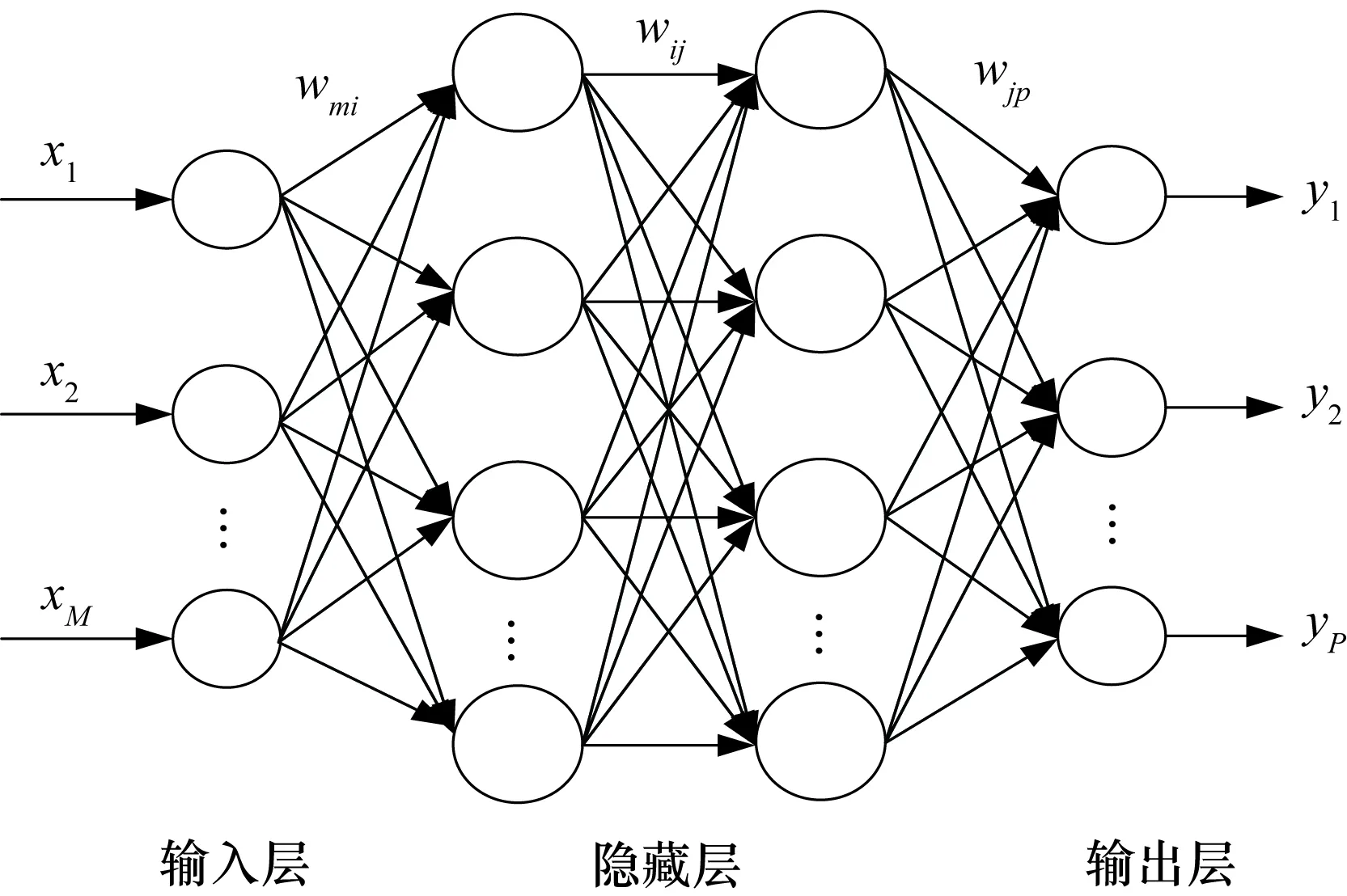
圖3 BP神經網絡結構
輸入信號從輸入節點依次穿過各隱藏層節點,然后傳到輸出節點,節點傳遞函數一般為sigmoid型函數。BP神經網絡從輸入節點到輸出節點存在某一映射g的最佳逼近,通過多次反復擬合訓練,最終得以近似復雜函數。隱藏層個數的選取根據經驗公式或者采取試算的方法,輸出層只選取一個,即預測的壽命值。神經網絡能較好地反映出設備狀態信號與性能退化趨勢之間的關系,適合非線性復雜系統的故障預測。蘇續軍等[37]對利用無人機系統故障數據集預測無人機故障時的相關問題進行分析,給出BP神經網絡的建模思路和計算方法,使用特征變量顯著性篩選技術識別故障影響因素,有效地應用至無人機故障預測中。趙輝[38]在對齒輪箱的軸承溫度進行預測時,使用了BP神經網絡算法,所得實驗結果良好,平均誤差能夠控制在5%以內。但ANN方法同時也存在諸多問題,如網絡訓練時間長、易陷入局部最優點、隱含層數與節點選取困難和需要大量數據為依據等。
2.4.2 基于SVM的方法
基于SVM的故障預測方法是基于統計學習理論的結構風險最小化原則的方法。SVM方法的原理旨在求解能夠正確劃分訓練數據集并且幾何間隔最大的分離超平面。如圖4所示,wx+b=0即為分離超平面,找到最大間隔超平面對數據進行分類。
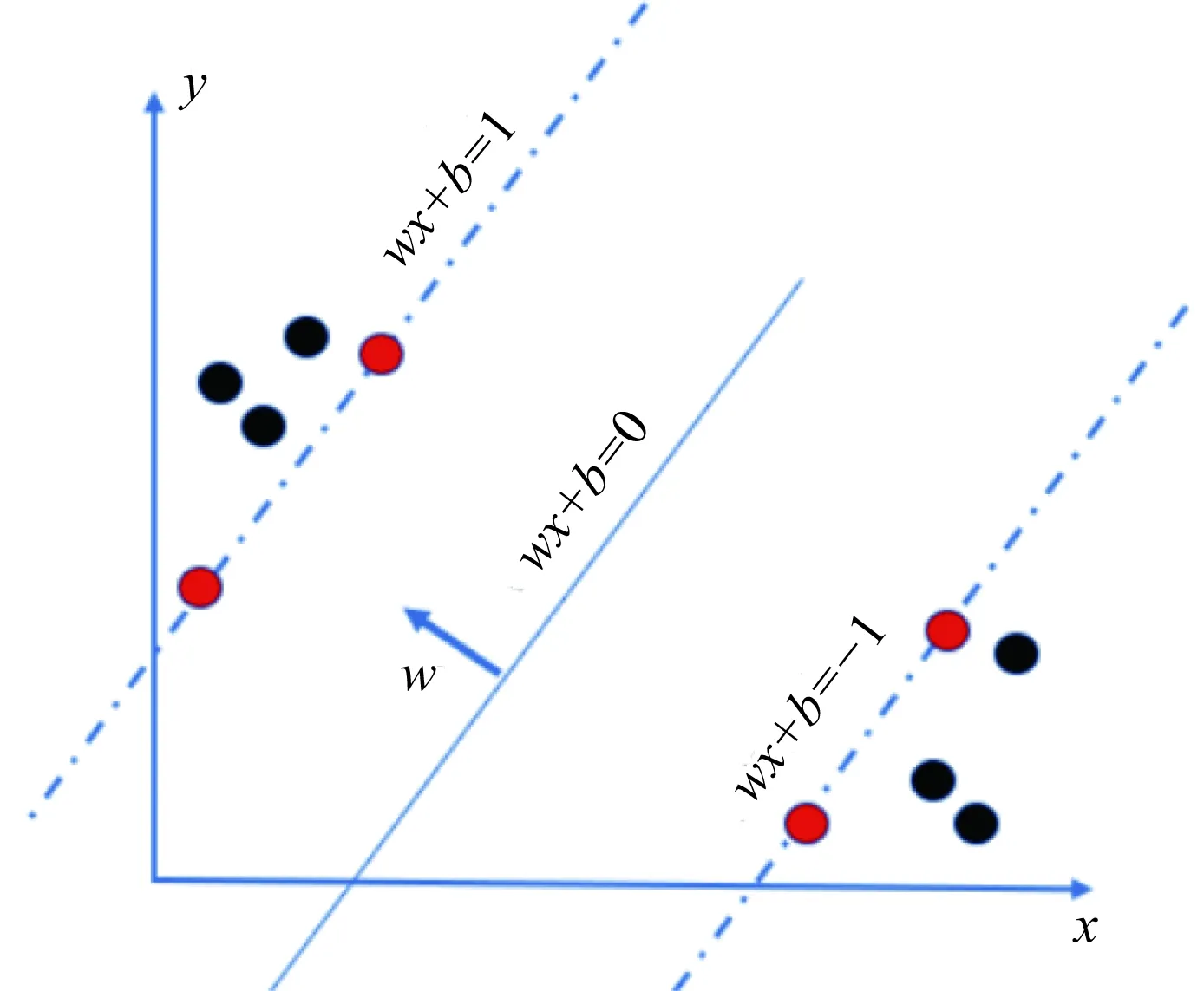
圖4 SVM原理圖
同傳統人工智能方法不同,SVM方法可以用于歷史故障數據較少的情況,因此,基于SVM的故障預測方法近年得到越來越多業界學者關注。目前已有多個不同類型的SVM方法應用在設備故障預測中,如One-Class SVM 、Least Square-SVM and Multi-Class SVM等方法。王伊婧心等[39]利用經驗模態分解理論與最小二乘支持向量機構建了一種新的預測模型,對非平穩時間序列進行EMD分解,通過改進高斯核函數提高其泛化能力,并利用改進的LS-SVM對各分量進行訓練及預測,通過對波音飛機的經典故障率預測算例,驗證方法的有效性和優越性。另外,支持向量回歸方法是SVM在故障預測中的應用形式,Benkedjouh等[40]使用該方法建立磨損特征和磨損程度之間的非線性關系,并應用于磨損機器的剩余壽命預測中。SVM也存在諸多局限性,其最主要的問題在于不能夠提供概率預測,進而增加了預測結果獲取的不確定性。
2.4.3 基于深度學習的方法
深度學習旨在通過模擬大腦的學習過程,結合海量的訓練數據,對更高階的本質特征進行信息提取,并逐層進化特征傳遞,實現信息的認知計算。深度學習通過建立深層次模型克服了傳統方法模型學習能力及泛化性能不足的問題,被廣泛應用于設備的剩余壽命預測,其主要的網絡模型有卷積神經網絡(Convolutional Neural Network,CNN)、長短期記憶網絡(Long Short-Term Memory,LSTM)和深度置信網絡(Deep Belief Network,DBN)。
CNN是典型的深度前饋人工神經網絡,受到生物學感受機制的啟發,一般由卷積層、池化層和全連接層等組成,其主要優勢有:① 共享權值,可很大程度地降低參數數量;② 局部連接,可以有效提升計算速度,減少參數數量;③ 下采用,可減少樣本總數,使得模型在具有魯棒性的同時減少參數數量[41]。這些優勢使得CNN可以最大程度地進行事物的特征提取,使其具備強大的認知和計算能力,為此學者們開始將其引入到故障預測領域,取得了不錯的效果。Alqasem等[42]使用CNN方法用于軟件故障預測研究,通過使用NASA的4個常用數據集(即PC1、KC1、KC2和CM1)進行試驗,CNN的準確率和檢出率分別達到標準值:PC1 97.7%、73.9%,KC1 100%、100%,KC2 99.3%、99.2%,CM1 97.3%、82.3%。王文慶等[43]利用CNN自動提取傳感器數據的局部抽象特征,采用具有長短期記憶能力的GRU來記憶序列的前后關系,提高RUL的預測精度,使用CNN進行自動濾波,顯著提升了預測值的穩定性和準確度。
LSTM網絡的優勢在于可以應用于較長時間序列的預測,具有較長時間的記憶功能,同時LSTM可以有效地解決訓練過程中出現的梯度爆炸和梯度消失問題[44]。LTSM的這些優勢能夠有效地挖掘數據的內在結構信息和關聯性,使得故障預測建模精度得以提高。何群等[45]利用相關輸入變量之間重要關聯信息,對歷史監測數據進行訓練學習,建立齒輪箱油溫監測LSTM模型,對預測殘差進行評估計算設定相應的檢測閾值,通過模型殘差分析和閾值比較實現齒輪箱故障狀態的檢測和預測,結果表明,該方法表現出更好的預測性能,能夠較早預測故障的發生。Liu等[46]將LSTM模型與統計過程分析相結合,使用NASA和FEMTO-ST研究所發布的軸承數據集進行實驗,預測航空發動機軸承多階段性能退化的故障,結果表明該方法具有更高的預測精度。
DBN方法依托于無監督深度學習模型,使用受限玻爾茲曼機(Restricted Boltzmann Machin,RBM)對原始數據的特征進行自動化提取。DBN模型的特征提取能力較強,能夠克服被觀測設備內部器件的機理和數據差異,使用從內部各器件所得到的數據可直接進行預測數學模型的建立。代杰杰等[47]使用國家電網公司收集的實際變壓器數據,采用DBN建立變壓器運行模型,并融合LSTM預測變壓器油中未來特征氣體濃度和變壓器狀態。結果表明,該方法具有較高的預測精度,能夠分析潛在故障。梁天辰[48]基于歷史數據和實時數據對多個DBN模型進行遷移訓練,有效解決歷史域和目標域數據分布差異帶來的預測偏差。
3 結束語
介紹了故障預測技術的相關理論概念和內涵,對當前設備廣泛應用的基于數據驅動的故障預測技術進行了調研和分析,重點介紹了數據驅動方法中的時間序列分析法、可靠性法、隨機過程方法和人工智能方法,詳細論述了各類方法的優點和不足,并給出各類方法在國內外的最新研究進展。雖然現有研究成果在故障預測領域已取得一些階段性的成果,但還存在許多問題,有待進一步深入研究和解決。
① 層級信息互耦合的復雜系統精準故障預測。實際被觀測對象往往由多個互關聯和互耦合的子部件或者子系統組成。但目前大多研究成果主要集中在單一層級部件的故障預測上,如Peng[49]和Li[50]等都是針對航空發動機系統層級的研究,缺乏對融合多層級互耦合信息的部件進行故障預測研究。因此,需研究建立子部件級、子系統級和總體系統級的多層次一體化監控預測體系,融合各層級互耦合信息,進而完成對復雜系統的系統級精準故障預測。
② 動態運行環境下的復雜系統精確故障預測。在實際工程應用過程中,被測對象所處環境通常是動態變化而非一成不變,退化過程也會因所處復雜環境的動態變化而發生改變。因此,在進行復雜系統故障預測時必須考慮現場復雜環境的變化。而部分涉及動態運行環境分析的研究,普遍缺乏對故障模型的普適性,如王振偉等[51]對半球諧振陀螺的故障模式進行在線動態檢測,存在緩發性故障檢測能力不足等問題。所以,在退化建模過程中,需研究新的方法模擬環境動態變化全過程并將其引入到構建的退化模型之中,使得退化建模更加接近實際現場退化過程,進而提高故障預測的精度。
③ 子部件動態變換下的復雜系統級精確故障預測。實際系統的運行往往伴隨子部件的維護和更換的情況,這種情況會導致故障預測模型變換,預測結果也會從非健康狀態突變至亞健康狀態或健康狀態。因此,開展考慮子部件變換情況下復雜系統故障預測的研究工作勢在必行。雖然已有諸多學者試圖解決這種問題,如鄭建飛等[52]提出的不完全維護影響的退化建模和RUL預測方法,但在狀態殘余量的估計準確性和非新維護的RUL預測的準確性上存在諸多不足。需要研究基于設備的隨機退化模型與子部件動態變換模型來構建新的綜合退化模型,使用新的估計模型參數方法。
④ 深度網絡模型在線狀態情況下的復雜系統精確故障預測。現有深度網絡模型研究成果大多使用離線過程分析,如Ellefsen等[53]通過對深度網絡模型的建立,研究了半監督模式下的深度學習方法在離線故障預測方面的應用。另外,多數深度網絡模型存在訓練時間較長,模型可解釋性較差,模型參數缺乏統一選取標準等問題。因此,需研究確定模型參數的選取標準,并在此基礎上,研究設計具備模型可解釋功能的短訓練深度網絡模型。
⑤ 基于不完美數據的復雜系統故障預測。基于數據驅動的故障預測方法本質上是將試驗獲取數據與預測模型相結合的方法,而在實際工程應用過程中,由于設備運行環境的復雜多變和設備本身的客觀不確定性,所獲取的試驗數據很可能存在數據量少、噪聲干擾、數據抖動、數據缺失等問題,這些不完美數據會對預測結果帶來影響。最新研究成果顯示已有學者提出一些解決方案,但大多都是針對單一特定數據問題,如張晟斐等[54]提出針對缺失數據下的剩余壽命預測方法和張旺等[55]提出針對數據噪聲干擾下的剩余壽命預測方法。因此,需要通過研究探索擴展數據或者數據融合等新方法保證數據質量,進而提升不完美數據狀況下的故障預測精度。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:26:08
汽車維護與修理(2016年10期)2016-07-10 08:17:41
工業設計(2016年12期)2016-04-16 02:52:00
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
