直升機升力系統數字化裝配設備設計
2022-05-24 03:13:14杜兆才鄭璐晗
測控技術 2022年5期
杜兆才,陳 闖,鄭璐晗
(中國航空制造技術研究院,北京 100024)
升力系統是直升機的核心部件,用于改變傳動方向、傳遞發動機功率、產生升力,主要包括主減速器、主旋翼、主槳轂、自動傾斜器,主旋翼安裝在主槳轂上,主槳轂和自動傾斜器安裝在主減速器上。自動傾斜器、主槳轂和主減速器組成了升力系統的關鍵部件(如圖1所示),大中型直升機自動傾斜器的球鉸中心孔與主減速器的輸出軸配合,主槳轂的齒形花鍵與主減速器輸出軸的齒形花鍵配合,裝配精度要求較高。
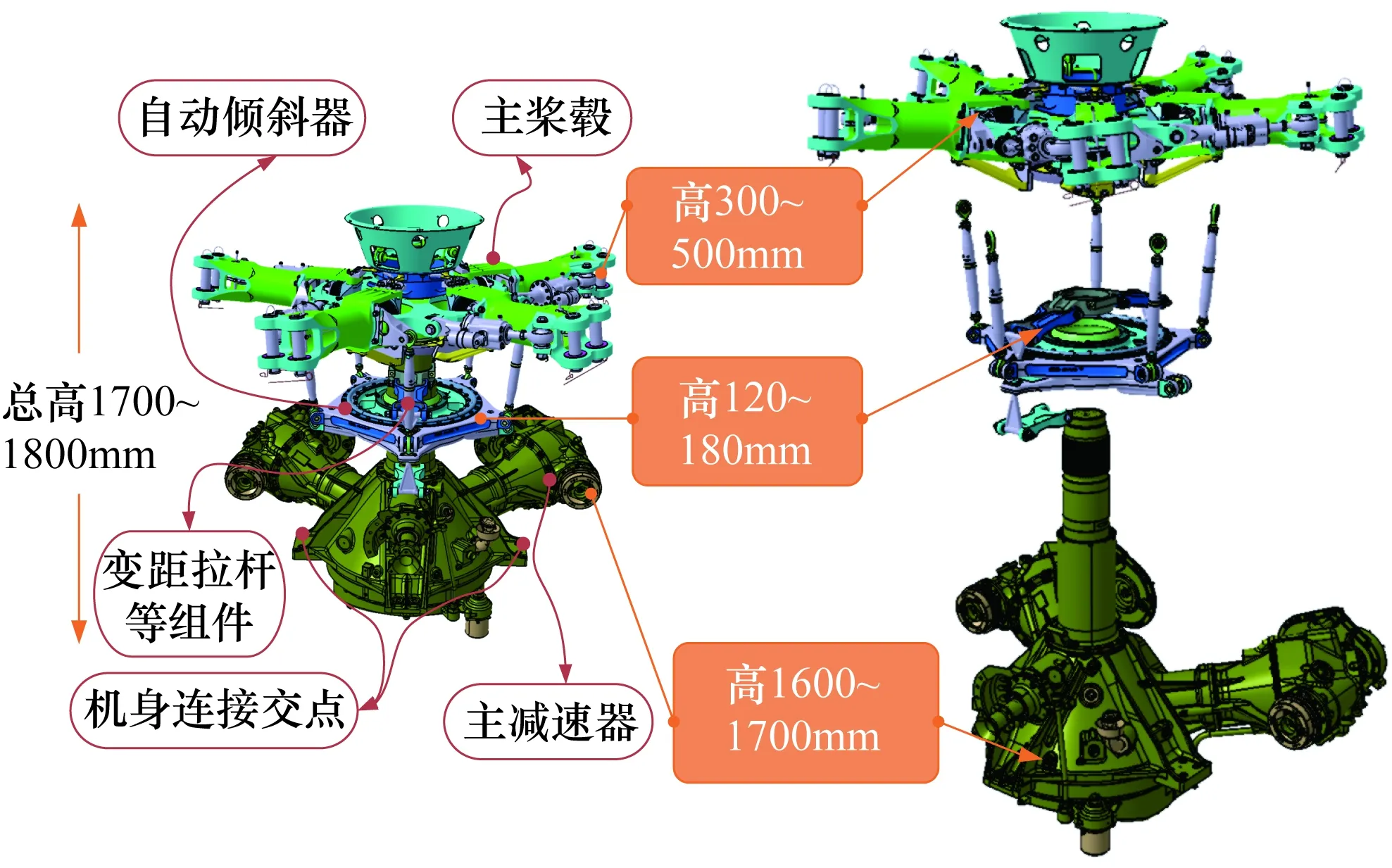
圖1 直升機升力系統關鍵部件裝配
目前,升力系統關鍵部件地面組立裝配過程為:主減速器固定,借助吊車吊裝自動傾斜器和主槳轂,手工裝配。這種方式存在以下弊端:
① 手工裝配精度低,難以滿足產品質量要求。
② 主減速器固定工裝無調姿功能,難以保證主減速器輸出軸垂直,自動傾斜器和主槳轂的裝配路徑與主減速器輸出軸軸線不重合,容易擦傷零件。
③ 吊裝過程中難以精確控制自動傾斜器和主槳轂的運動,容易因碰撞損傷部件。
④ 自動傾斜器和主槳轂的套合深度大,人工裝配施力不均勻,容易造成卡阻,劃傷零件。
⑤ 手工裝配方式需要大量人工參與,反復調整,裝配周期長。
本文涉及的主槳轂質量為560 kg,直徑約1.3 m;自動傾斜器質量為160 kg,直徑約1.5 m。隨著我國大噸位直升機的研發,自動傾斜器、主槳轂的尺寸與質量均會大幅度增加,質量將達到數百公斤,直徑接近2 m,裝配質量要求也不斷提高[1],依靠吊裝的手工裝配模式已無法滿足裝配需求,亟需采用自動化裝配技術[2]解決裝配質量低、周期長等問題,實現大中型直升機升力系統的高質高效裝配[3-7],提升我國直升機裝配技術水平。
1 裝配方案
自動化裝配設備包含龍門結構、多自由度位姿調整平臺、自動傾斜器和主槳轂夾具、主減速器旋轉支撐平臺等。主減速器旋轉支撐平臺用于主減速器的定位,并聯機構安裝在龍門結構的橫梁上,利用夾具夾持自動傾斜器或主槳轂,并聯機構通過六自由度運動調整自動傾斜器或主槳轂的位置和姿態,裝配到主減速器的輸出軸上,方案如圖2所示。
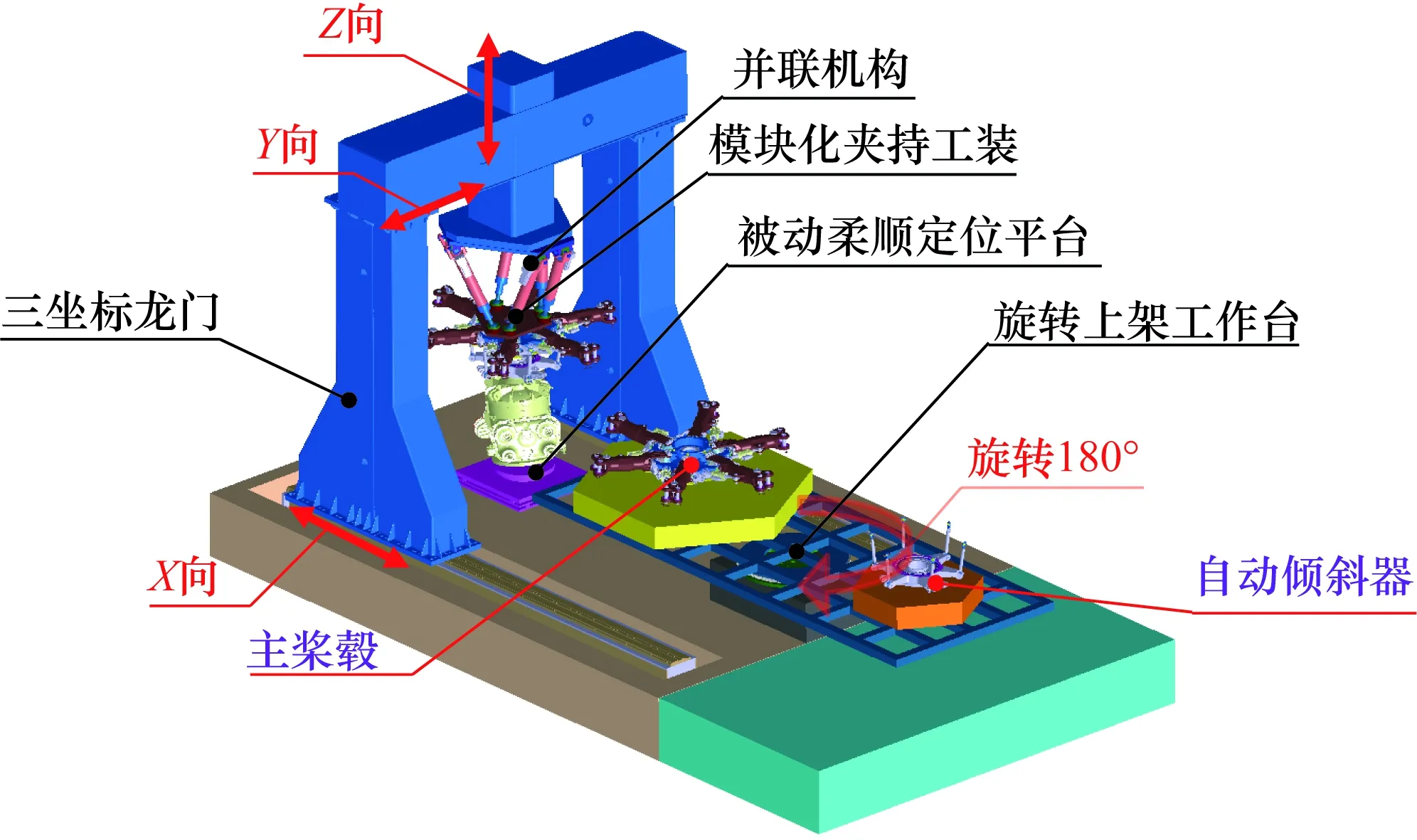
圖2 裝配方案
由于需要采用一種結構緊湊、承載能力強、剛度大的多自由度位姿調整平臺,六自由度并聯機構可以滿足上述需求,并聯機構是一種空間多閉環結構[8],定平臺和動平臺用2個或2個以上的分支相連,具有2個或2個以上的自由度,且驅動器分布在各個不同的分支上。與傳統的串聯機構相比,并聯機構具有剛度重量比大、結構緊湊、精度高、響應速度快等優點。1965年,Stewart[9]提出如圖3所示的并聯機構,由定平臺、動平臺和6條運動支鏈組成,具有6個自由度,后來人們常把具有6條支鏈的六自由度并聯機構稱為Stewart平臺 。1978年,Hunt[10]指出Stewart平臺可用作機器人。1979年,McCallion和Truong[11]首次設計出可以用于裝配的機器人。此后,并聯機構的應用領域不斷擴展[12]。

圖3 Stewart平臺
當然,并聯機構也存在一些不足,具體如下:
① 并聯機構的工作空間(尤其是姿態空間)比較小。
② 開發高精度、高剛度、持久耐用的鉸鏈是工程界的一大難題。
③ 由于并聯機構的空間多閉環結構特點,誤差補償非常困難。
本文將著重解決上述問題,設計滿足自動傾斜器和主槳轂的裝配需求的并聯機構。
2 并聯機構選型
裝配過程中,將主減速器豎直擺放,自動傾斜器和主槳轂需要調整的角度比較小,較小的姿態空間調整能力即可滿足裝配需求,因此,選擇圖4所示的6-PUS型并聯結構,在動平臺和定平臺之間共有6條運動支鏈,在每條運動支鏈中,P表示移動副,U表示虎克鉸,S表示球鉸,所以,該機構具有3個平動、3個轉動共6個自由度。該機構不僅具有剛度大、承載能力強和精度高等通用特點,還具有裝配方向行程大、機構相對簡單、結構對稱等特點,非常適合升力系統的裝配[13-16]。
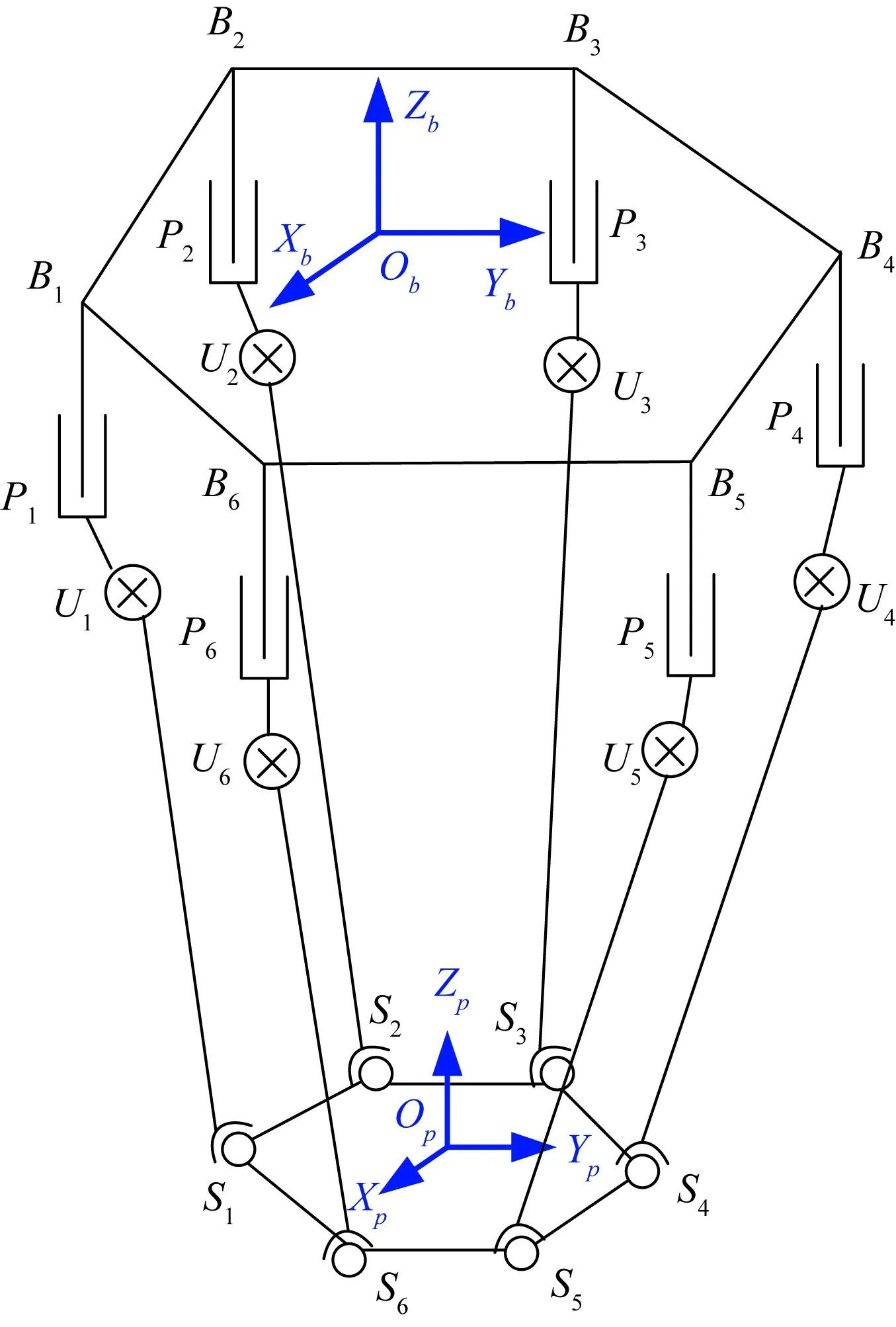
圖4 6-PUS型并聯結構
3 基于6-PUS并聯機構的裝配設備結構
基于6-PUS并聯機構的裝配設備的結構形式如圖5所示,為六邊形結構。在六邊形圍框上均布3個立柱,每個立柱上平行布置2個滑臺,分別連接2條運動支鏈,每條運動支鏈由虎克鉸、連桿和球鉸構成,6條運動支鏈分別連接動平臺的6個球鉸支座,構成了6-PUS并聯機構。
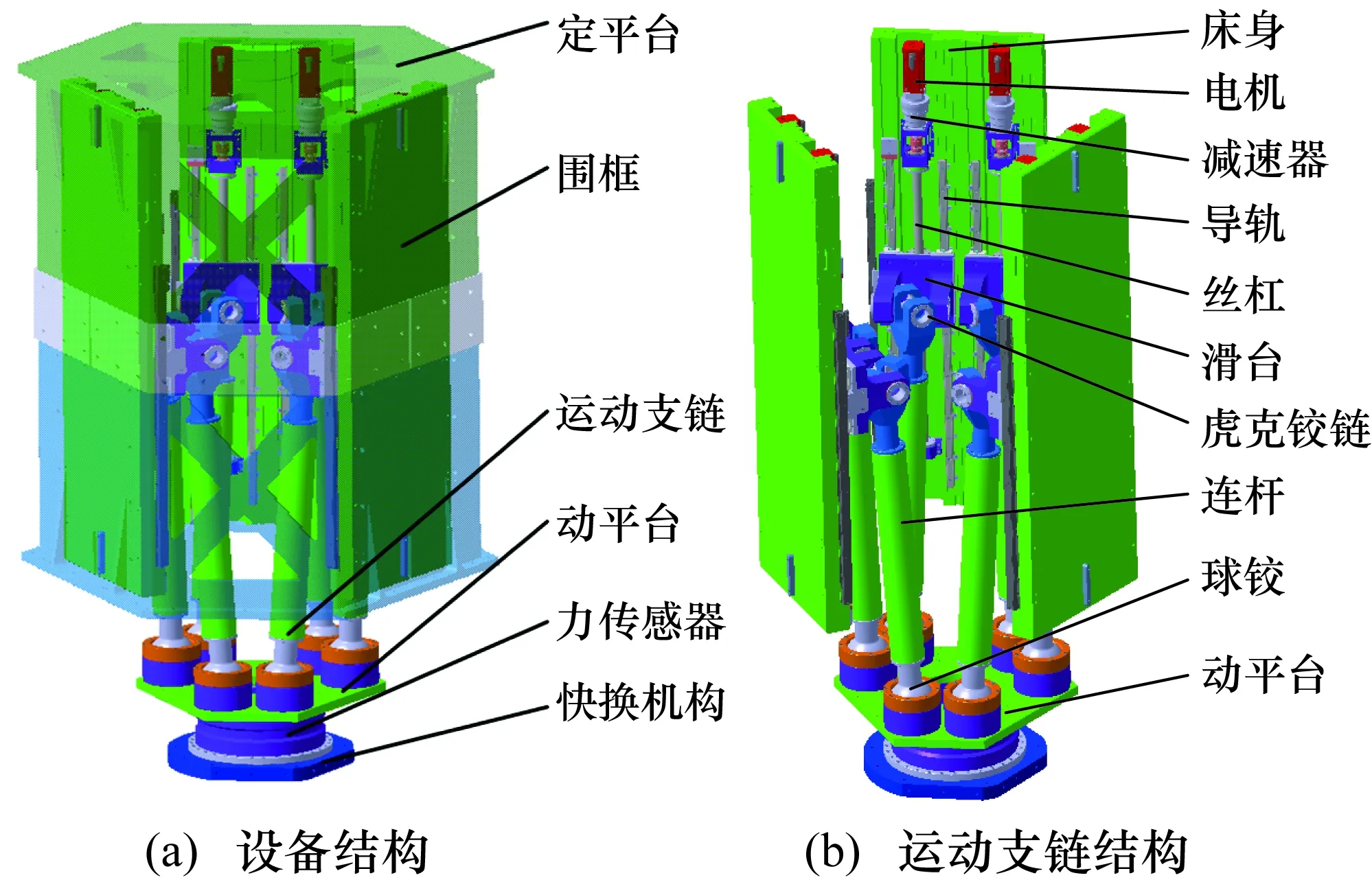
圖5 基于6-PUS并聯機構的裝配設備
圍框端面外接圓直徑1650 mm,高1850 mm,每條運動支鏈長1395 mm,Z向(裝配方向)行程930 mm,X向、Y向行程分別為±150 mm、±130 mm,繞X、Y、Z軸的轉角分別達到±25°、±22°、±15°。
4 關鍵零部件設計
虎克鉸的結構形式如圖6所示。
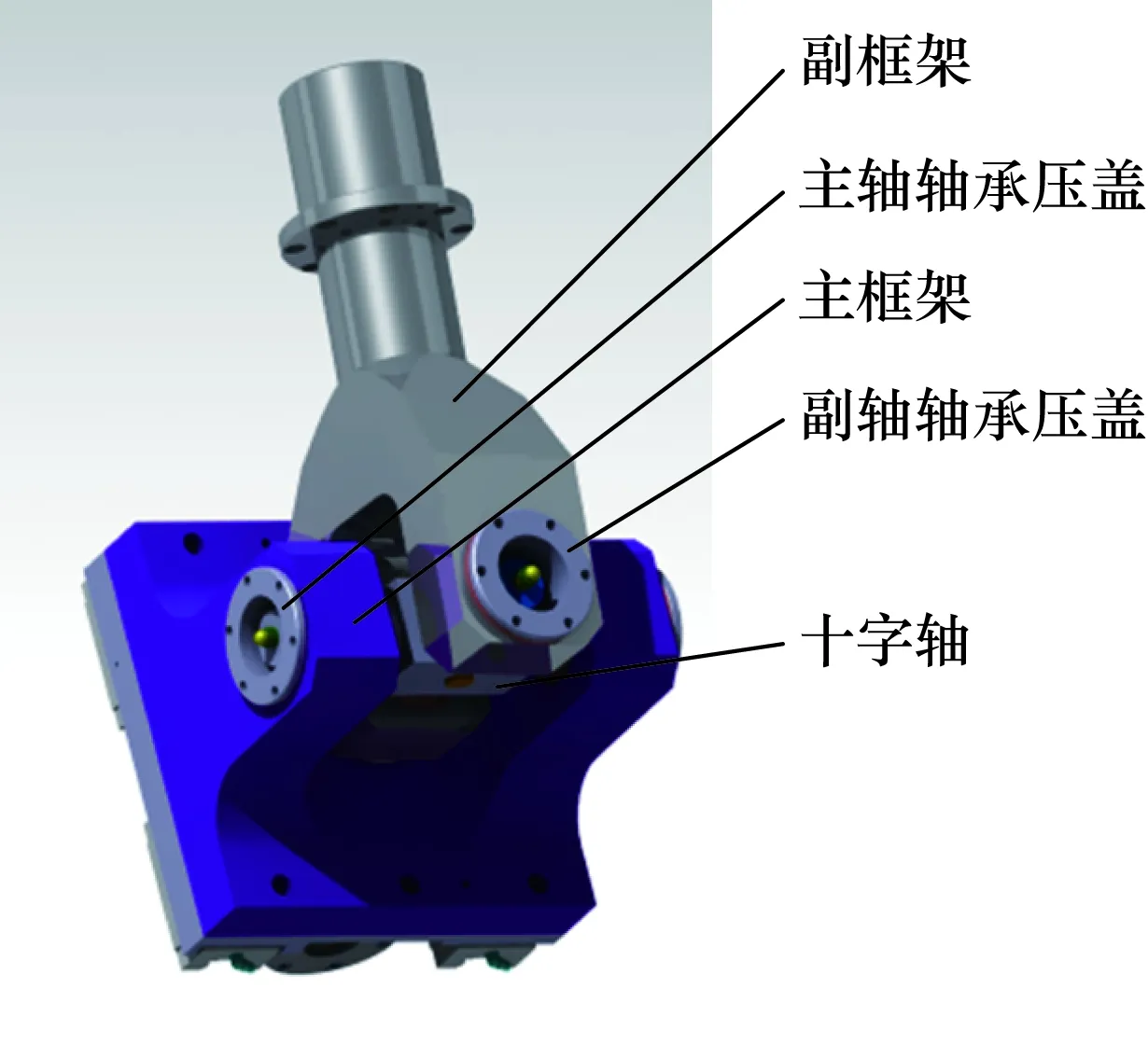
圖6 虎克鉸結構
采用圖7所示的分體式球鉸結構,這種結構便于修配和調整運動副間隙。球關節座的材料采用GCr15,球關節的材料采用30CrMnSiA。
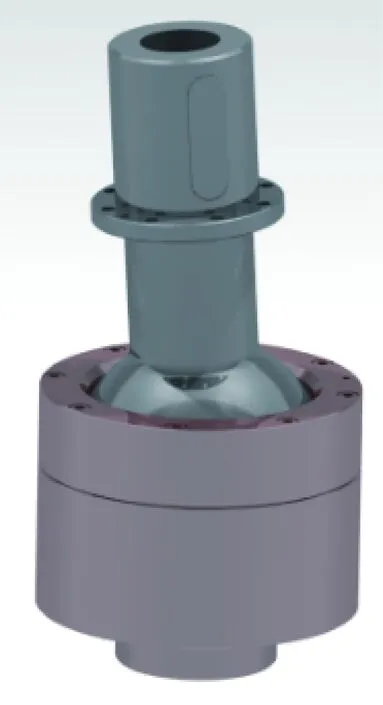
圖7 球鉸結構形式
5 運動學分析
6-PUS并聯機構的動平臺由6個運動支鏈與定平臺(基座)連接,每個運動支鏈由一個定長的連桿和一個滑塊組成,連桿的一端通過球鉸與動平臺相連,另一端通過虎克鉸與滑塊相連,而滑塊與定平臺(機座)之間形成移動副,通過改變滑塊在固定導軌上的位置,改變動平臺的位置和姿態。
為了便于描述,定義一個全局坐標系作為基礎坐標系,一個局部坐標系作為活動坐標系。在定平臺B1B2B3B4B5B6上建立全局坐標系Ob-XbYbZb,原點Ob位于定平臺的幾何中心。在動平臺S1S2S3S4S5S6上建立局部坐標系Op,原點Op位于動平臺的幾何中心,各坐標軸分別與全局坐標系的同名坐標軸方向相同。局部坐標系Op-XpYpZp的原點Op在全局坐標系Ob-XbYbZb中的坐標為(xbp0+Δxp,ybp0+Δyp,zbp0+Δzp),(xbp0,ybp0,zbp0)表示動平臺的初始位置,(Δxp,Δyp,Δzp)表示動平臺的位移。
以一個運動支鏈為分析對象,繪制如圖8所示的矢量關系圖。
根據圖8,可得:
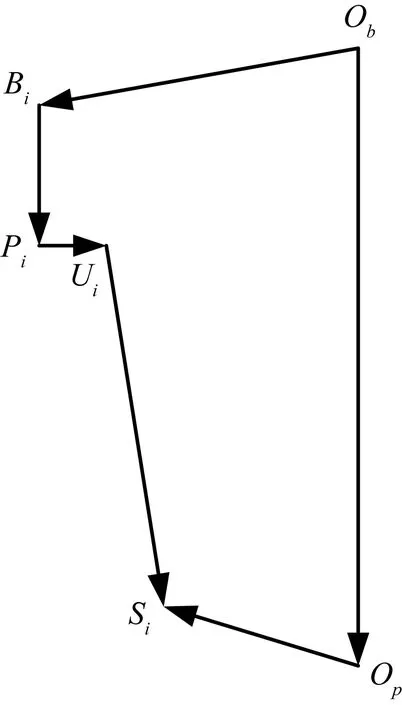
圖8 運動支鏈的矢量關系
UiSi=ObOp+OpSi-ObBi-BiPi-PiUi
(1)
取向量的模長,可得:
Li=‖UiSi‖=‖ObOp+OpSi-ObBi-BiPi-PiUi‖
(2)
在進行運動學逆解計算時,已知各參數,根據給定的動平臺位置和姿態,由上述方程可求得滑臺運動量zpi。
用R表示局部坐標系Op-XpYpZp相對于全局坐標系Ob-XbYbZb的姿態。R是一個3×3矩陣,若用z-y-x歐拉角描述動坐標系相對于全局坐標系的姿態,則可表示為
R=RxαRyβRzγ
(3)
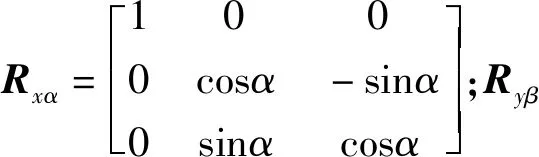
代入各變量,可得:
(4)
在局部坐標系Op-XpYpZp下,OpSi=[xSiySizSi]T,將各變量代入式(3),可得:
(5)
式中:zpi為待求的未知量;其余均為已知量或可求的量。因此,可根據裝配需求,快速求出各支鏈的運動逆解。
6 工作空間分析
并聯機構的工作空間相對較小,因此備受關注。根據動平臺的姿態,工作空間分為:可達工作空間、定姿態的工作空間、靈活工作空間。可達工作空間是指動平臺參考點可以到達的范圍,無姿態要求;靈活工作空間是指動平臺參考點可以通過任意一種姿態到達的全部點集合,由于結構限制,通常不會出現靈活工作空間;定姿態工作空間為動平臺在預定姿態下可以到達的點集合。對于升力系統裝配任務,需要掌握某些姿態范圍內的定姿態工作空間。分析工作空間的目的是在已知機構參數和關節變量變化范圍的前提下,評價動平臺實現位姿的能力。
平臺鉸鏈分布、各支鏈行程、各支鏈桿件等效直徑、球鉸或虎克鉸極限擺角等都影響并聯機構工作空間的大小和形狀。采用極坐標搜索的方法求解工作空間:將動平臺參考點可能到達的空間作為搜索空間,先用平行于定平臺的平面從Zmin到Zmax開始分割,將該空間分成很多個厚度為ΔZ的微小子空間,每一個子空間近似是高度為ΔZ的圓柱。將每一個微小子空間當成工作空間的剖切面,采用極坐標搜索方式確定工作空間的邊界。先從極角θ=0沿著極徑ρ=0開始搜索,搜索步長為Δρ,則第j次搜索極徑為ρj=jΔρ。搜索完畢后,進行下一次搜索,極角逆時針旋轉取θi=iΔθ(i表示搜索次數,Δθ表示極角步長),在此極角上,做類似的極徑搜索。經多次搜索,可得到某個剖切面上的一系列離散邊界點,即得到剖切面上的工作空間。沿著Z軸搜索,可依次獲得所有剖切面上的全部邊界點,連接所有邊界點,就得到并聯機構的邊界曲面。這種方法不需要經過復雜的數學推導,簡單方便,比較實用。
動平臺進動角為0°~360°、章動角為0°~10°、自旋角為±10°時的工作空間如圖9所示。
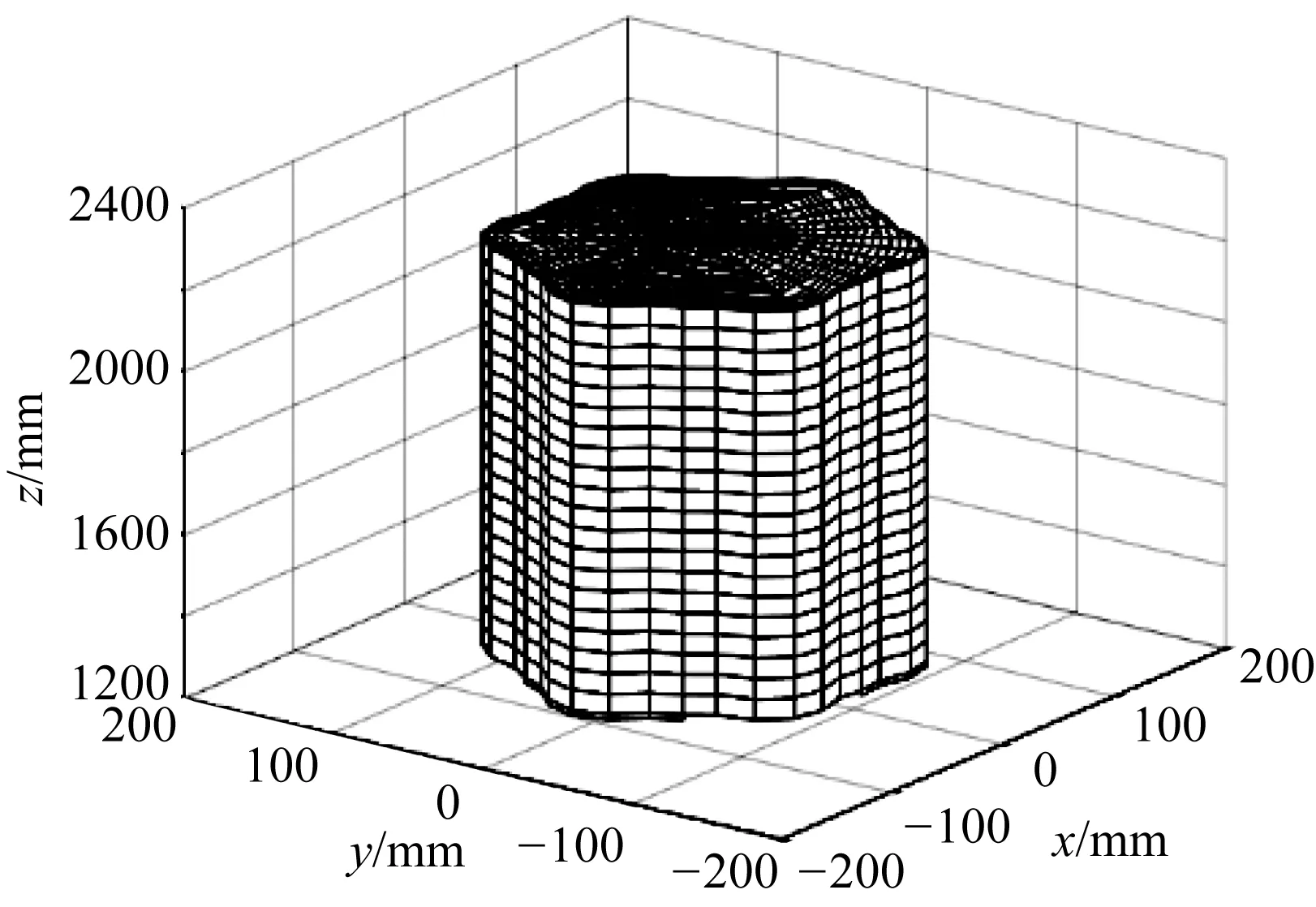
圖9 設備工作空間
工作空間頂部區域呈紡錘形,如圖10所示。工作空間向XOY平面的投影如圖11所示。
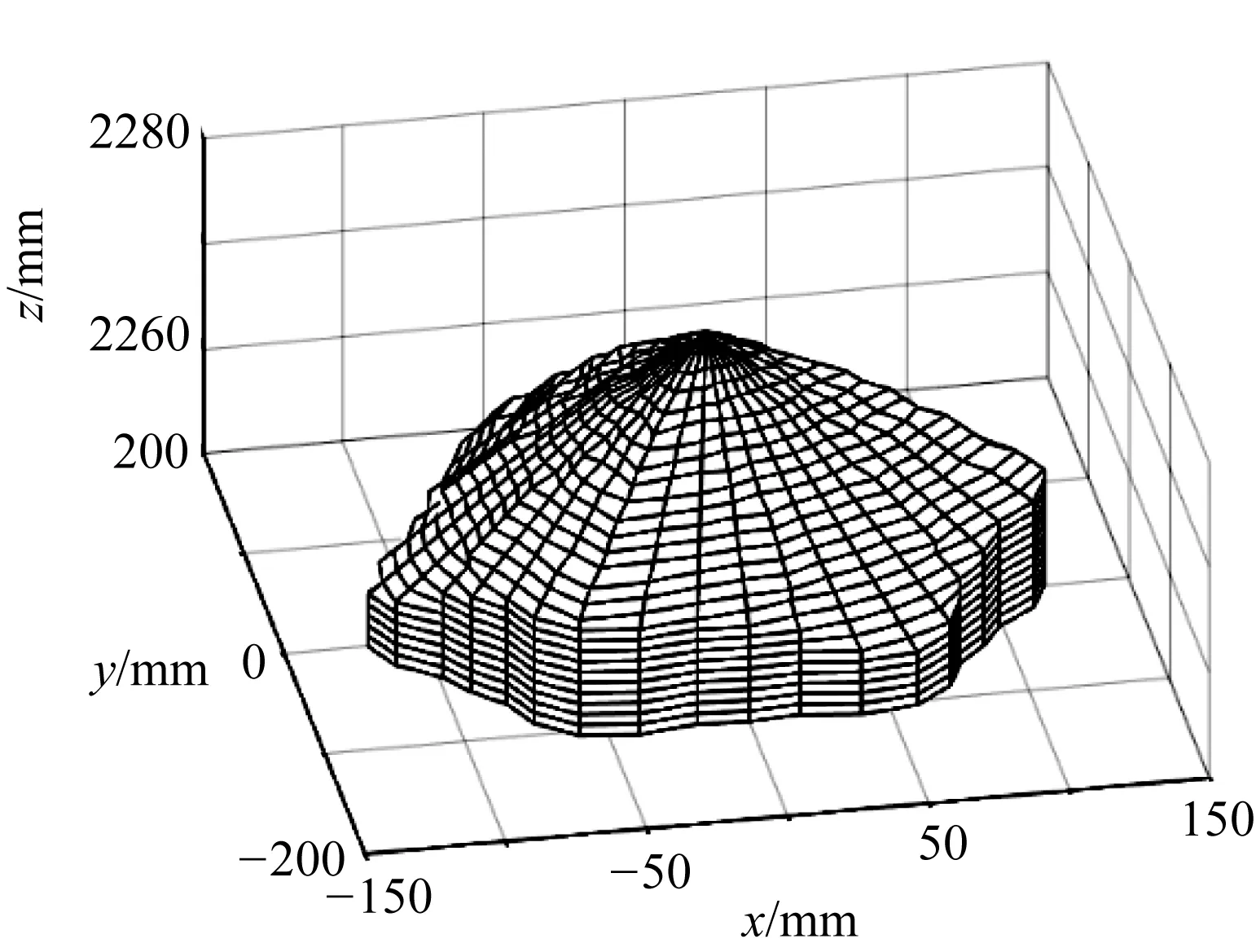
圖10 工作空間頂部區域
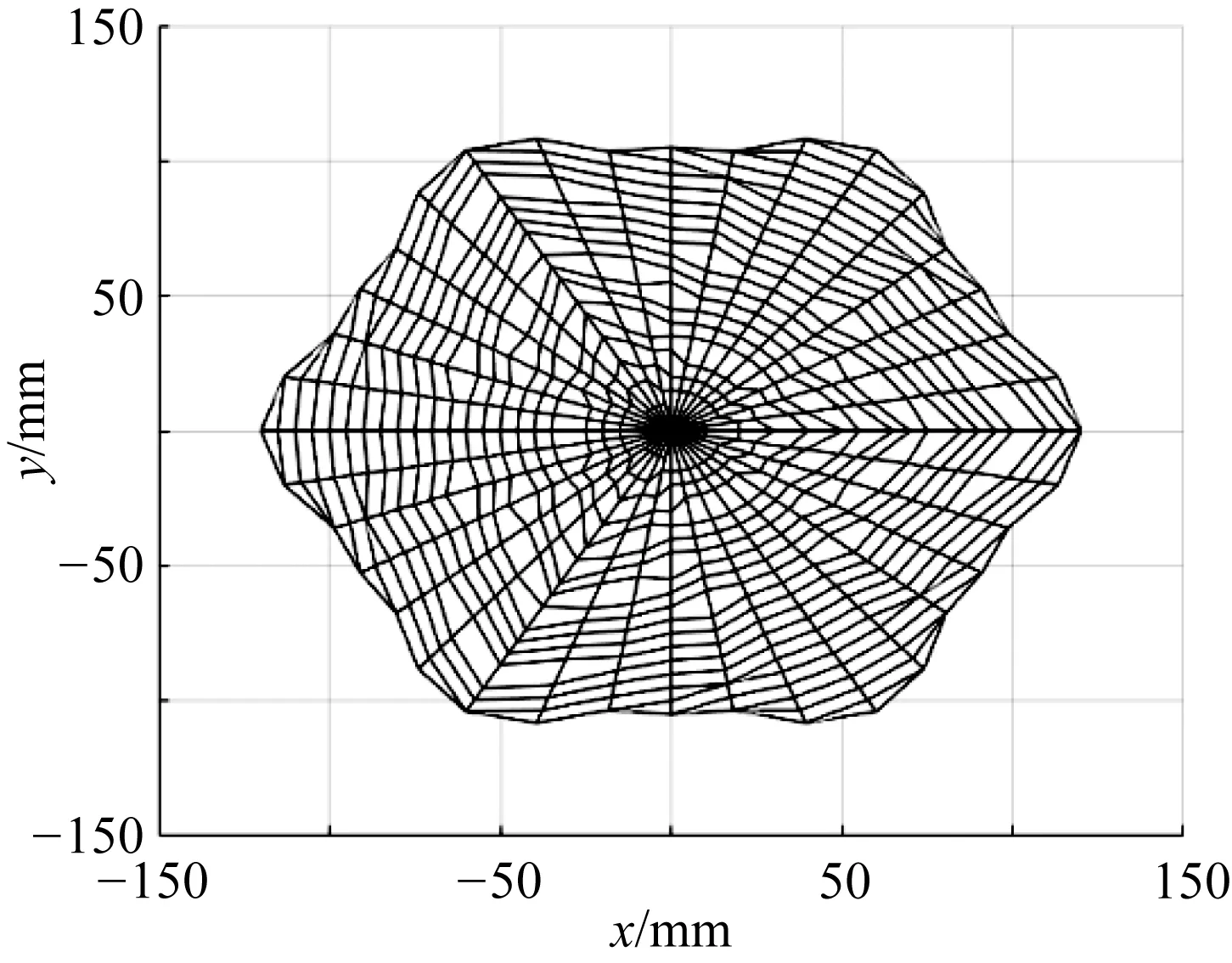
圖11 工作空間向XOY平面的投影
7 精度設計
精度是并聯機構的重要評價指標,精度設計包括精度預估與精度綜合兩個方面,更具工程價值的是精度綜合,即預先給定最大位姿允許誤差,求出應分配給零部件的制造公差,并使其達到某種意義下的均衡。
影響設備誤差的因素很多,選取主要因素:虎克鉸十字軸中心點、球鉸中心點,這兩個點決定了運動支鏈的位置和姿態,6條運動支鏈共同作用,決定了動平臺的位置和姿態。虎克鉸十字軸中心點與zSi相關,球鉸中心點與xSi、ySi相關。假定這些影響因素是獨立作用的,而且誤差值很小,通過對運動學方程求微分來獲得誤差之間的映射關系。
首先分析zSi的誤差對設備位姿的影響,由式(5)可得:
(6)
(7)
(8)
式中:

由此,可知虎克鉸十字軸中心點、球鉸中心點的位置對動平臺精度的影響,式(5)~式(8)可用于預估零部件裝配間隙和運動控制精度。
8 仿真算例
并聯機構中各點的坐標如表1所示。
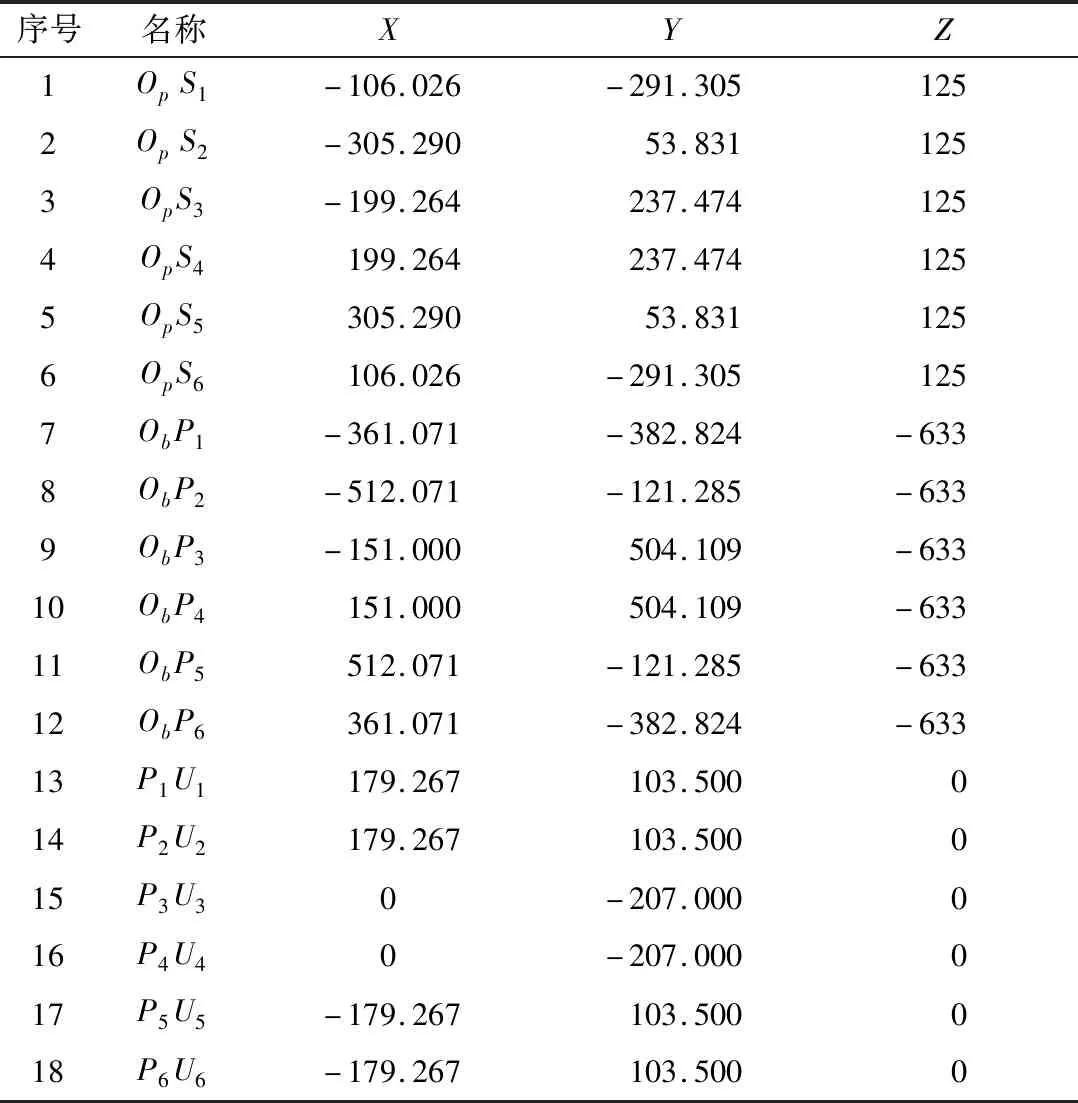
表1 各點的坐標值 單位:mm
利用式(5)~式(8)進行仿真分析,當預期的動平臺誤差為(0.05,0.05,0.05)時,xSi、ySi和zSi的最大允許誤差分別為0.039 mm、0.041 mm和0.035 mm。
9 結束語
針對直升機升力系統手工裝配質量不穩定、效率低等問題,提出了基于6-PUS并聯機構的數字化裝配設備設計方法,研究了運動學建模、分析等技術,設計了用于直升機升力系統裝配的6-PUS并聯機構,該機構可用于直升機升力系統的數字化裝配。
