伺服系統(tǒng)速度環(huán)控制器參數(shù)的自整定及優(yōu)化*
2022-05-19 09:12:24李方俊王生捷
現(xiàn)代防御技術(shù) 2022年1期
關(guān)鍵詞:系統(tǒng)
李方俊,王生捷
(北京機械設(shè)備研究所,北京 100854)
0 引言
由于較高的功率密度與穩(wěn)定的輸出轉(zhuǎn)矩,以永磁同步電機為基礎(chǔ)的交流伺服控制系統(tǒng)在工業(yè)生產(chǎn)中得到了廣泛的應(yīng)用。而速度環(huán)作為伺服控制系統(tǒng)中重要的中間控制環(huán)路,其決定了系統(tǒng)的響應(yīng)速度與魯棒能力,因此速度環(huán)控制器參數(shù)的設(shè)計影響著伺服系統(tǒng)的控制性能。常見的速度環(huán)自整定方法主要基于系統(tǒng)的數(shù)學(xué)模型,其中轉(zhuǎn)動慣量直接決定了速度環(huán)控制器參數(shù)的大小,因此許多研究論文中速度環(huán)的控制器參數(shù)整定過程前常伴隨著轉(zhuǎn)動慣量的辨識過程。如文獻(xiàn)[1]中采用改進(jìn)加減速法對轉(zhuǎn)動慣量進(jìn)行辨識,克服了傳統(tǒng)加減速法精度較差,負(fù)載慣量識別過程應(yīng)用場景受限的缺點。文獻(xiàn)[2]中利用朗道自適應(yīng)的辨識算法對系統(tǒng)轉(zhuǎn)動慣量進(jìn)行辨識,并重點考量了噪聲對辨識過程的影響。文獻(xiàn)[3]利用擴展卡爾曼濾波器對永磁同步電機伺服系統(tǒng)的轉(zhuǎn)動慣量辨識進(jìn)行了仿真和實驗研究,取得了較高的辨識精度。但以上方法存在調(diào)試參數(shù)較多,算法實現(xiàn)較為復(fù)雜的特點。本文希望轉(zhuǎn)動慣量辨識算法實現(xiàn)簡潔,試參數(shù)少,且對系統(tǒng)運動過程無特別要求,采用遺忘因子遞推最小二乘法更加符合工程應(yīng)用的需要[4-6]。
考慮到伺服系統(tǒng)本身具有諸多的非線性因素,建立的數(shù)學(xué)模型與實際系統(tǒng)不能完全匹配,辨識出的轉(zhuǎn)動慣量仍包含有辨識誤差,故在數(shù)學(xué)模型基礎(chǔ)上整定出來的控制器參數(shù)往往并非最優(yōu)結(jié)果,需要進(jìn)一步的優(yōu)化處理。如采用粒子群優(yōu)化及其改進(jìn)算法[7-8],基于線性最優(yōu)二次型調(diào)節(jié)器(linear qua?dratic regulator,LQR)方法等,對辨識出轉(zhuǎn)動慣量后的控制器參數(shù)進(jìn)行整定與優(yōu)化[9]。
然而,智能尋優(yōu)算法計算量大,且難以在MCU(micro control unit)中編程實現(xiàn),基于模型的優(yōu)化算法也依賴數(shù)學(xué)模型建立的精確性。
因此,本文提出一種基于轉(zhuǎn)動慣量辨識的速度環(huán)控制器參數(shù)自整定及優(yōu)化算法,即利用速度環(huán)數(shù)學(xué)模型,經(jīng)頻域分析推導(dǎo)出控制器參數(shù)后[10-11],采用基于超調(diào)量和系統(tǒng)剛度的變步長迭代尋優(yōu)算法,逐步完成對速度環(huán)控制器參數(shù)的整定和優(yōu)化過程。此方法不依賴于系統(tǒng)的數(shù)學(xué)模型,且實現(xiàn)過程簡單直觀。通過仿真實驗,證明了該方法的有效性。
1 速度環(huán)控制器參數(shù)設(shè)計
1.1 速度環(huán)控制器數(shù)學(xué)模型
交流伺服系統(tǒng)的控制器結(jié)構(gòu)常由電流環(huán)、速度環(huán)和位置環(huán)構(gòu)成,永磁同步電機作為其重要的執(zhí)行單元,數(shù)學(xué)模型常表示為[12-13]
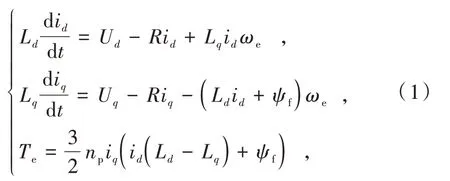
式中:Ld,Lq為d-q軸電感;R為電機電阻;Ud,Uq為電機d-q軸電壓;id,iq為d-q軸電流;ψf為電機轉(zhuǎn)子磁鏈;np為電機極對數(shù);Te為電機電磁力矩;ωe為電機電角速度。對于表貼式永磁同步電機,系統(tǒng)常采用d軸參考電流指令= 0 的控制方式,故電機模型可簡化為
因此交流伺服系統(tǒng)的電流環(huán)傳遞函數(shù)框圖可表示為如圖1 所示。
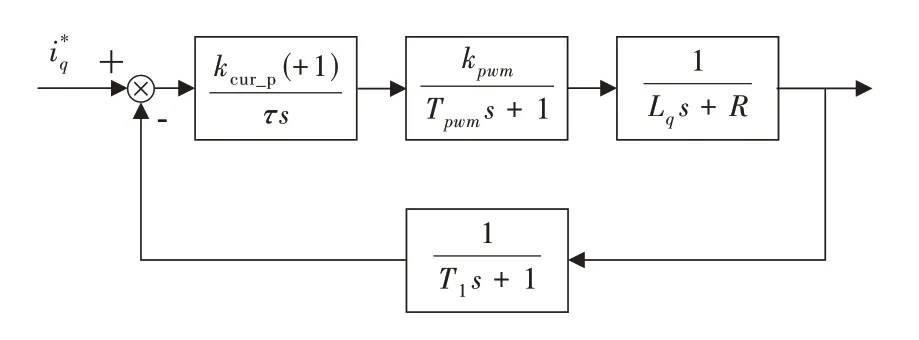
圖1 電流環(huán)傳遞函數(shù)框圖Fig.1 Block diagram of current loop transfer function
圖1中kcur_p為電流環(huán)PI 控制器的比例系數(shù);τ=kcur_p/kcur_i,kcur_i為電流環(huán)控制器的積分系數(shù);kpwm為逆變器增益,Tpwm為逆變器延時時間常數(shù);T1為電流環(huán)濾波系數(shù),可將圖1 中電流環(huán)開環(huán)傳遞函數(shù)表示為

將式(3)合并后略去高階項可簡化為

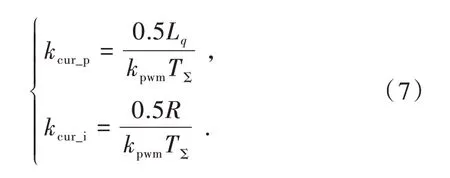
式中:Tc=Lq/R為電氣時間常數(shù);TΣ=Tpwm+T1,通常情況下電流環(huán)電氣時間常數(shù)較大,故常采用控制器零極點對消的方式將電流環(huán)開環(huán)傳遞函數(shù)校正為I型系統(tǒng),令

則校正后電流環(huán)開環(huán)傳遞函數(shù)為

式中:K=kcur_pkpwmτR,其閉環(huán)傳遞函數(shù)可表示為
按照二階系統(tǒng)最佳阻尼比K TΣ= 0.5,可得電流環(huán)控制器參數(shù)為[14-15]
由于速度環(huán)的帶寬遠(yuǎn)小于電流環(huán)的帶寬,故在速度環(huán)內(nèi)的電流環(huán)閉環(huán)傳遞函數(shù)可簡化為

伺服系統(tǒng)的速度環(huán)傳遞函數(shù)框圖可表示如圖2所示。
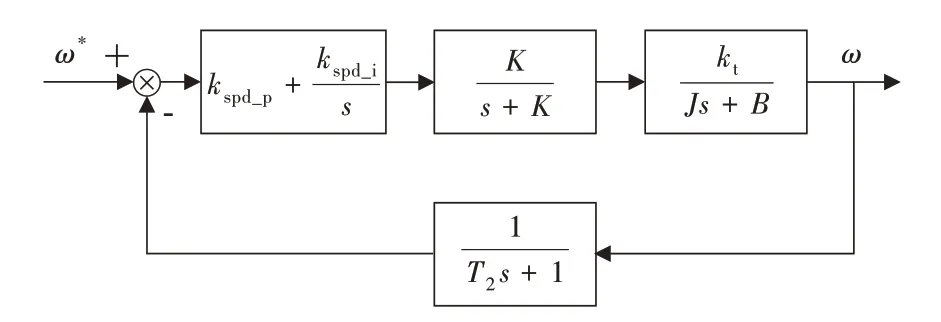
圖2 速度環(huán)傳遞函數(shù)框圖的Fig.2 Block diagram of speed loop transfer function
圖2中,kspd_p,kspd_i為速度環(huán)控制器比例、積分增益系數(shù);kt為電機力矩系數(shù),J為電機端等效轉(zhuǎn)動慣量,B為動摩擦因數(shù),T2為速度環(huán)濾波系數(shù),則轉(zhuǎn)速環(huán)開環(huán)傳遞函數(shù)可表示為
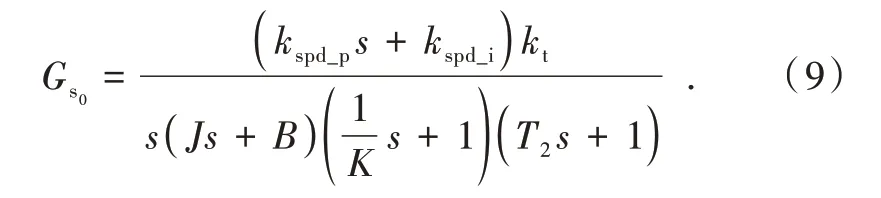
合并略去高階項后可得

1.2 頻域法設(shè)計速度環(huán)控制器參數(shù)
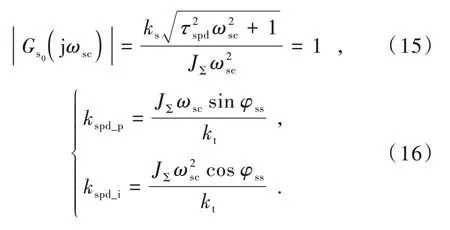
本文采用頻域法分析速度環(huán)控制器參數(shù)的設(shè)計規(guī)則,在式(10)的基礎(chǔ)上,設(shè)定速度環(huán)開環(huán)截止頻率和相角裕度分別為ωsc,φss,可得到速度環(huán)的幅頻特性和相頻特性關(guān)系式為
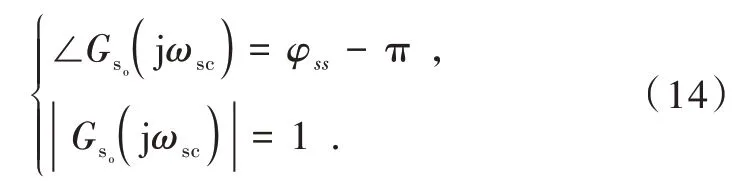
可計算得到
2 轉(zhuǎn)動慣量辨識
從速度環(huán)控制器參數(shù)的設(shè)計規(guī)則可看出,欲完成自整定過程需已知系統(tǒng)電機軸端的等效轉(zhuǎn)動慣量大小。本文采用遺忘因子遞推最小二乘算法完成系統(tǒng)轉(zhuǎn)動慣量的辨識過程。首先依據(jù)永磁同步電機的運動方程

忽略掉動摩擦因數(shù)的影響,對式(17)進(jìn)行離散化處理[16]:
式中:k為采樣時刻;T為采樣周期。假設(shè)采樣頻率較高,系統(tǒng)在相鄰2 個周期內(nèi)的擾動力矩近似不變,根據(jù)(18)可得
令

則可根據(jù)如下的遺忘因子遞推最小二乘法完成轉(zhuǎn)動慣量的辨識過程:
3 控制器參數(shù)尋優(yōu)
將辨識出來的轉(zhuǎn)動慣量代入式(16)后即可完成交流伺服系統(tǒng)速度環(huán)的自整定過程,但由于系統(tǒng)建模過程中的簡化以及存在的未建模動態(tài)因素,因此自整定出來的速度環(huán)控制器參數(shù)往往并非最優(yōu)的系統(tǒng)控制參數(shù),需要對控制器參數(shù)進(jìn)行優(yōu)化處理。
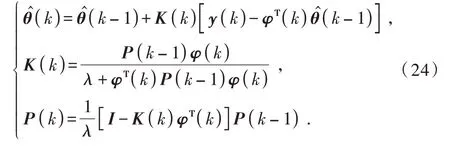
本文設(shè)計了變步長迭代算法對系統(tǒng)的控制器參數(shù)進(jìn)行優(yōu)化處理,其流程圖如圖3 所示。圖中kω1,kω2為速度波動的上下限系數(shù),用于限制參數(shù)初始優(yōu)化階段時轉(zhuǎn)速的調(diào)整范圍,避免轉(zhuǎn)速響應(yīng)過大且為后續(xù)的轉(zhuǎn)速調(diào)整保留余量;δ為速度反饋曲線的實際超調(diào)量,δspd為系統(tǒng)設(shè)置的超調(diào)量閾值。
圖3 迭代尋優(yōu)算法流程圖Fig.3 Procedural diagram of the iterative optimization algorithm
系統(tǒng)采用方波信號作為速度環(huán)的參考輸入指令,參數(shù)優(yōu)化流程如圖4 所示。系統(tǒng)根據(jù)變步長迭代算法在轉(zhuǎn)速信號到達(dá)期間,對速度響應(yīng)超調(diào)量進(jìn)行計算并優(yōu)化控制器參數(shù),下一個轉(zhuǎn)速信號到來時進(jìn)行下一輪迭代,直至得到滿足要求的控制器參數(shù)。
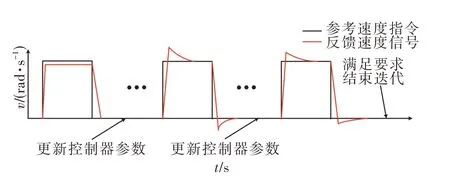
圖4 參數(shù)優(yōu)化過程Fig.4 Parameters optimization process
4 仿真結(jié)果及分析
本文針對所提出的算法在Matlab/Simulink 中進(jìn)行仿真實驗,所用永磁同步電機參數(shù)為:d-q軸電感Ld,q為6 mH,電 機 電 阻R為0.34 Ω,力 矩 系 數(shù)kt為0.579 N·m/A,電機轉(zhuǎn)動轉(zhuǎn)量J為0.05 kg. m2,摩擦因數(shù)B為0.01 N·m·s,額定轉(zhuǎn)速為1 500 r/min;系統(tǒng)電流環(huán)控制周期為0.000 1 s,濾波系數(shù)為0.01,電流環(huán)控制器比例系數(shù)為0.3,積分系數(shù)為0.001 7。
首先在系統(tǒng)電流環(huán)工作條件下進(jìn)行電機等效轉(zhuǎn)動慣量的辨識實驗,給定系統(tǒng)斜率為1 A/s 的斜坡電流指令信號,RLS 辨識模塊中電流與轉(zhuǎn)速的采樣周期為0.000 5 s,遺忘因子λ為0.95,得到的轉(zhuǎn)動慣量辨識曲線如圖5 所示,大小為0.049 kg·m2,辨識誤差為2%,辨識時間為0.4 s 左右。隨后以2 倍大小變化系統(tǒng)的轉(zhuǎn)動慣量,得到不同轉(zhuǎn)動慣量下系統(tǒng)的辨識曲線如圖6 所示。從圖6 中可看出遺忘因子遞推最小二乘法能準(zhǔn)確辨識出系統(tǒng)的轉(zhuǎn)動慣量,辨識時間長短與轉(zhuǎn)動慣量的大小呈正相關(guān)關(guān)系。
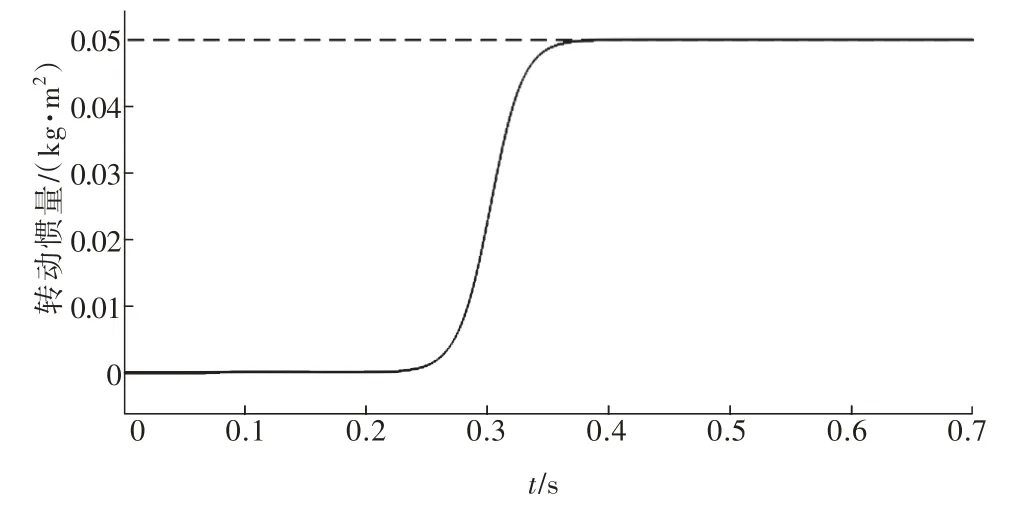
圖5 轉(zhuǎn)動慣量辨識Fig.5 Inertia identification

圖6 變轉(zhuǎn)動慣量辨識Fig.6 Variable inertia identification
依據(jù)辨識出的轉(zhuǎn)動慣量即可開始速度環(huán)控制器參數(shù)的自整定過程。設(shè)定系統(tǒng)轉(zhuǎn)動慣量為0.005 kg·m2,速度環(huán)開環(huán)頻率為電流環(huán)開環(huán)頻率的1/20,初始相角裕度按90°計算,計算可得速度環(huán)控制器自整定參數(shù)為:kspd_p= 0.423,kspd_i= 0,速度的上下限系數(shù)kω1,kω2為0.91和0.90。給定系統(tǒng)幅值為157 rad/s(約為電機額定轉(zhuǎn)速)的方波速度指令后,得到的速度響應(yīng)曲線如圖7所示。由于轉(zhuǎn)速上升過程中最大值為157 rad/s且存在小幅波動,說明比例系數(shù)設(shè)置偏大。為減小剛度和為后續(xù)比例系數(shù)的小范圍調(diào)整留足余量,系統(tǒng)以步長0.01逐步減小比例系數(shù),最終得到kspd_p= 0.16的轉(zhuǎn)速曲線。過程中最大轉(zhuǎn)速大小為141.7 rad/s 且變化平穩(wěn),穩(wěn)態(tài)誤差為15.7 rad/s。
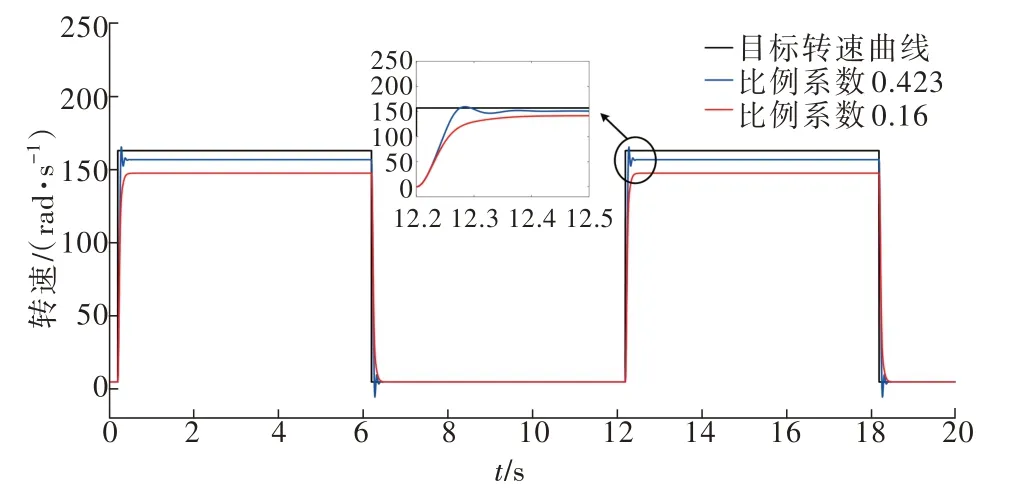
圖7 比例系數(shù)初始標(biāo)定Fig.7 Proportion gain initial setting
現(xiàn)保持比例系數(shù)kspd_p= 0.16 不變,目標(biāo)轉(zhuǎn)速為157 rad/s,以速度環(huán)采樣周期(0.000 5 s)的10%為步長逐漸增加控制系積分系數(shù),系統(tǒng)超調(diào)量閾值為5%,如圖8 可以看到隨著積分系數(shù)的增加,轉(zhuǎn)速反饋曲線超調(diào)量增大,恢復(fù)穩(wěn)態(tài)的調(diào)整時間變短;而比例系數(shù)的相對增加能壓縮速度曲線的超調(diào)量,但會延長調(diào)整時間,且比例和積分系數(shù)大小同時影響著系統(tǒng)的剛度。表1 為上述積分系數(shù)調(diào)整過程中系統(tǒng)超調(diào)量的變化。
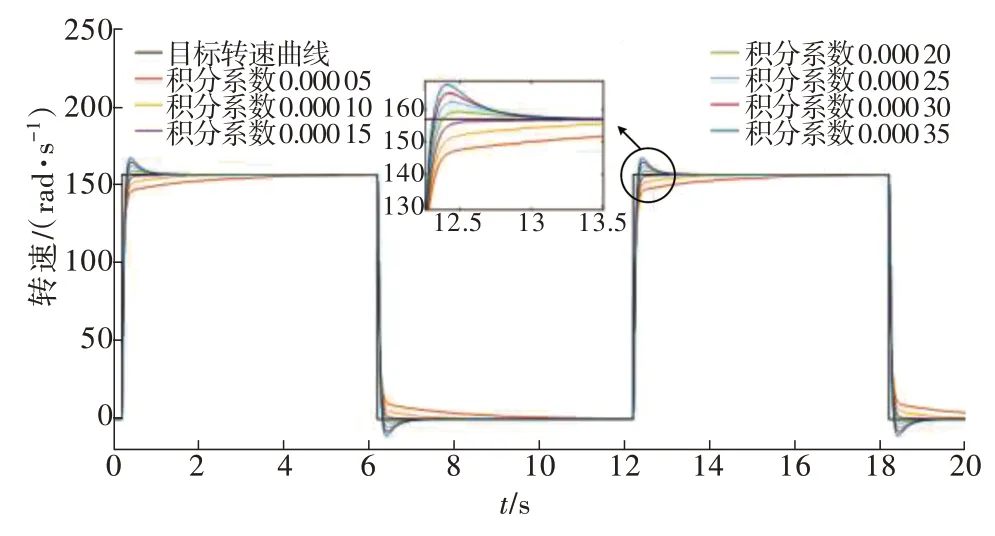
圖8 積分系數(shù)調(diào)整Fig.8 Integral gain adjustment
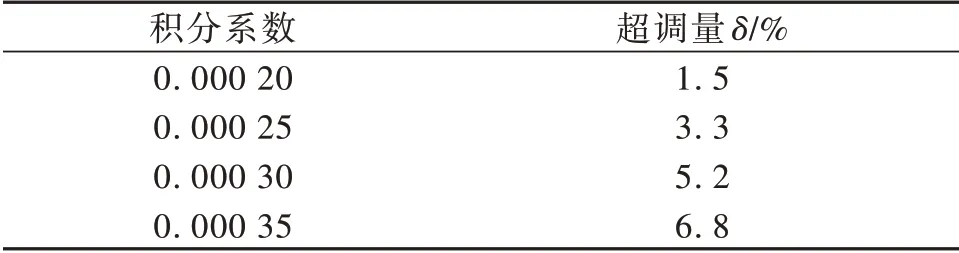
表1 系統(tǒng)超調(diào)量變化Table1 System overshoot
針對如何調(diào)整系統(tǒng)的控制器參數(shù)使得轉(zhuǎn)速曲線超調(diào)量合適,調(diào)整時間短,魯棒性強,本文接下來采用小步長迭代尋優(yōu)的算法尋找合適的控制器參數(shù)。以控制器參數(shù)kspd_p= 0.16,kspd_i= 0.000 35 為基準(zhǔn)(系統(tǒng)超調(diào)量為6.3%),為了進(jìn)一步增加系統(tǒng)的剛度和減小超調(diào)量,以當(dāng)前比例系數(shù)大小的5%~10%(本文選取為0.01)為步長動態(tài)增加kspd_p,得到的曲線如圖9 所示。直至系統(tǒng)超調(diào)量δ≤5%,此時比例系數(shù)kspd_p= 0.2,進(jìn)一步增加比例系數(shù)會仍會增加系統(tǒng)的剛度,但過大的kspd_p會導(dǎo)致系統(tǒng)的調(diào)整時間延長,甚至引起系統(tǒng)的抖動,故目前得到的尋優(yōu)參數(shù)kspd_p= 0.2,kspd_i= 0.000 35,既能保證系統(tǒng)的快速響應(yīng)能力也能提高系統(tǒng)的魯棒性。
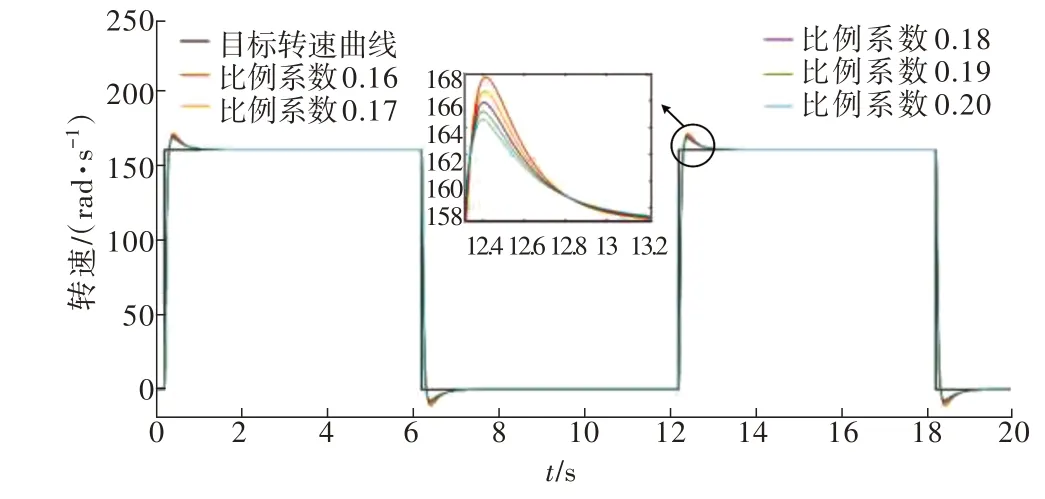
圖9 比例系數(shù)調(diào)整Fig.9 Proportion gain adjustment
如圖10 所示,為檢驗尋優(yōu)參數(shù)的抗擾能力,給定系統(tǒng)157 rad/s 的階躍轉(zhuǎn)速指令信號,系統(tǒng)在10 s時施加大小為10 N·m 的擾動力矩,可得到如表2 所示的實驗結(jié)果。從表中實驗結(jié)果可看出,經(jīng)過小步長迭代處理后的控制器參數(shù)抗擾能力增強,轉(zhuǎn)速波動量大小相較于之前明顯降低。
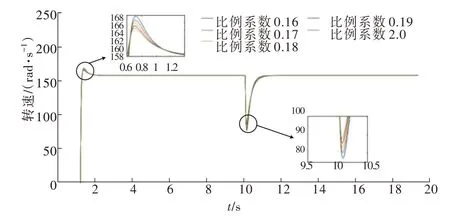
圖10 系統(tǒng)加載測試Fig.10 System load test
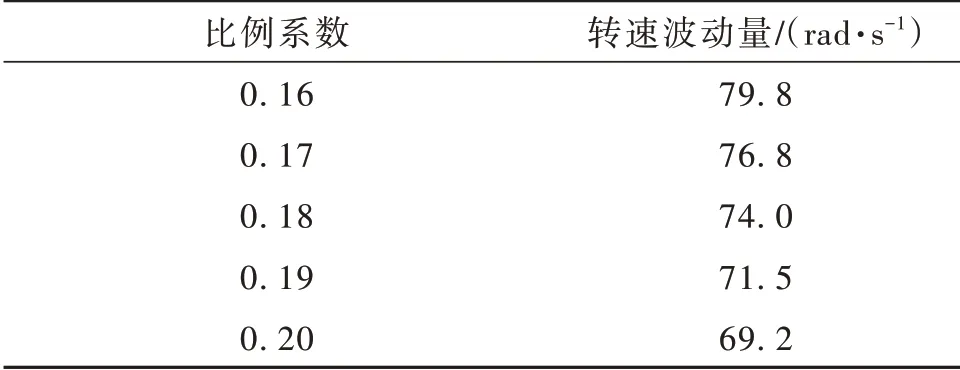
表2 系統(tǒng)轉(zhuǎn)速波動Table2 System speed fluctuation
5 結(jié)束語
本文針對交流伺服系統(tǒng)速度環(huán)控制器參數(shù)設(shè)計的需求,提出了一種基于轉(zhuǎn)動慣量辨識的參數(shù)自整定及優(yōu)化策略。仿真結(jié)果表明:遺忘因子遞推最小二乘法能有效辨識出系統(tǒng)的轉(zhuǎn)動慣量,為后續(xù)控制器參數(shù)初值的選取提供了參考。本文設(shè)計的變步長迭代尋優(yōu)算法能有效完成控制器參數(shù)的整定及尋優(yōu)過程,系統(tǒng)速度響應(yīng)曲線超調(diào)量小,魯棒性強,具有一定的工程實用性。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32