彈道目標跟蹤濾波方法研究*
2022-05-19 09:12:10孫照強魏巍王志貴陳燕
現代防御技術 2022年1期
關鍵詞:方法
孫照強,魏巍,王志貴,陳燕
(1. 北京無線電測量研究所,北京 100854;2. 中國衛星導航系統管理辦公室,北京 100053)
0 引言
彈道導彈是現代高技術戰爭中的重要作戰武器,具有射程遠、威力大、機動強、精度高等優良的戰術性能,在現代戰爭中占有極其重要的位置。正因為如此,彈道導彈的防御正逐漸成為各國關注的焦點。為了實現對彈道導彈的成功攔截,地面探測雷達的跟蹤精度是至關重要的。因此,彈道目標跟蹤濾波方法的選擇和設計就成了重中之重。
彈道導彈從發射到落地的整個飛行過程可分為3 個階段:主動段、自由段和再入段[1-2]。在各個運動階段彈道導彈受到的作用力不同,其動力學特性具有顯著的差異性[3]。在實際應用中,彈道導彈跟蹤系統都是非線性的,一般采用對于非線性系統具有良好跟蹤性能的濾波算法,其中最具代表性的有擴展卡爾曼濾波(extended Kalman filter,EKF)[4-5]、無敏卡爾曼濾波(unscented Kalman filter,UKF)[6-8]和粒子濾波(particle filter,PF)[9-10]。其中,PF 相比于EKF和UKF 不受高斯噪聲的假設,并且對任意狀態模型均有較好的適應性,但是PF 需要已知狀態向量的后驗概率密度,因此在實際應用中,對于彈道導彈的跟蹤最常用的還是EKF 和UKF 算法。然而,由于這2種濾波方法所采用的線性化手段不同,導致其濾波精度、計算量、收斂時間等不盡相同,在實際應用中需要針對具體的跟蹤場景進行綜合考慮。
針對以上問題,本文從現有的幾種彈道導彈跟蹤方法出發,分別對其應用關鍵點、優缺點進行了詳細分析。通過仿真實驗對比了幾種濾波算法的跟蹤精度,給出了不同濾波算法在實際應用中需要重點考慮的問題,為彈道導彈目標跟蹤濾波方法的選擇和設計提供參考和依據。
1 目標跟蹤濾波方法綜述
1.1 濾波坐標系的選擇
當雷達處于跟蹤狀態時,雷達波束指向角會隨著目標的運動而變化。為了唯一定量地描述目標的空間運動狀態,需要以某一參照系為基準建立坐標系。對于相控陣雷達來說,目標量測的獲取一般是先在陣面余弦坐標系下獲得雷達測量誤差,然后結合波束指向得到目標的距離、角度等信息。在濾波過程中所用到的量測值可以有以下幾種選擇:一是陣面余弦坐標系下的距離以及各方向余弦;二是雷達球坐標系下的徑向距離R、方位角Az和俯仰角E;三是雷達大地直角(北天東)坐標系下的x,y,z,具體采用哪種量測值進行跟蹤濾波,需要依據雷達類型以及跟蹤環境進行選擇。
1.2 線性濾波和非線性濾波
通常,濾波過程可分為線性濾波和非線性濾波2 種。判斷是線性濾波還是非線性濾波取決于2 個方面:一是目標的觀測方程,即雷達測量值與目標狀態值之間的關系。在許多實際情況中,雷達測量值是在球坐標系下得到的,而目標的狀態值是在直角坐標系下表示的,此時觀測方程是目標狀態變量的非線性函數,需要采用非線性濾波進行處理。二是目標的狀態方程,或者叫運動方程。運動方程如果選擇勻速模型、勻加速模型或者類似的能夠將目標的狀態轉移矩陣與狀態變量分離開來,這樣的就是線性的運動方程,反之就是非線性的。
1.3 濾波方法分析
由于彈道導彈在不同飛行階段所受作用力不同,其狀態方程以及雷達觀測數據與導彈運動狀態參數之間的關系是非線性的,需要采用非線性濾波方法進行處理。在實際應用中,以選擇目標量測值為雷達球坐標系下的徑向距離R、方位角Az、俯仰角E,目標狀態量為雷達大地直角(北天東)坐標系下的(x,y,z,x?,y?,z?)T為例。在彈道導彈目標跟蹤中常用的非線性濾波方法包括EKF、轉換測量卡爾曼濾波(conversion measurement Kalman filter,CMKF)[11]、基于彈道運動方程的擴展卡爾曼濾波(ballistic EKF,BEKF)[12]、基于彈道目標運動方程的無敏卡爾曼濾波(ballistic UKF,BUKF)4 種方法。篇幅所限,本文對上述4 種濾波方法的詳細濾波過程不作介紹,而是重點對4 種方法的關鍵點、優缺點以及仿真條件進行分析。
為方便后續方法比較,首先給出非線性系統狀態估計的一般描述。
非線性系統的狀態方程可表示為

測量方程為

為此,系統的狀態估計值可表示為

(1)EKF
為了解決彈道導彈跟蹤濾波的非線性問題,通常處理方法是將非線性濾波問題轉換為近似線性濾波問題,其中一種線性化方法是泰勒級數展開,由此得來的方法即是EKF 濾波。即對式(1),(2)中的非線性函數在?(k|k)附近進行泰勒級數展開,并保留一階項為

式中:fX(k)為狀態方程的雅克比矩陣,可表示為
同理,可得到測量方程的雅克比矩陣。
由于在濾波過程中目標量測值為雷達大地球坐標系下的R,Az,E,目標運動方程為雷達大地直角坐標系下的勻加速模型。可見,此時只有測量方程為非線性函數。因此,只需利用泰勒級數展開求出量測方程的雅可比矩陣,然后利用卡爾曼濾波過程即可完成濾波。EKF 算法相對簡單,計算量較小。
(2)CMKF
在上述EKF 濾波過程中,濾波器將狀態預測轉換到測量坐標系下,用測量信息來更新狀態的均值和方差。在彈道導彈跟蹤中,將非線性過程轉換為線性化問題處理的另一種手段,是將目標的量測值轉換到直角坐標系,這樣導彈的狀態方程與觀測數據之間的關系就變為線性關系,就可利用線性濾波方法進行濾波處理,這種方法被稱之為CMKF方法。
然而這種方法需要求出目標轉換量測值和轉換量測誤差的協方差矩陣[13]。其中,求解轉換量測誤差的協方差矩陣相對復雜,計算量較大。同時,還需要估計出雷達量測值R,Az,E的方差。但是,估計R,Az,E的方差在實際應用中存在一定的困難和不確定性,應用起來受到一定限制,濾波效果不佳。
(3) BEKF
BEFK 與EKF 的差別是目標運動方程由勻加速模型變為雷達大地直角坐標系下的彈道目標運動方程,運動方程中考慮了目標引力、離心慣性力、葛氏慣性力和空氣阻力的影響[14]。在實際應用中,需要求出量測方程和運動方程的雅可比矩陣,求解過程相對復雜,但是由于其采用了彈道目標的運動方程,對彈道目標的濾波精度比常規的EKF和CMKF都高。
(4)BUKF
為了進一步改善非線性問題對濾波的影響,UKF 方法在處理目標狀態方程時采用無敏變換對狀態方程的概率密度分布進行近似,用一系列采樣點來逼近狀態的后驗概率密度,而不對非線性函數進行近似[15]。無敏變換基本原理如下:
假設隨機變量x的維數為nx,非線性方程為y=h(x),假設x的均值和協方差分別是和Px,利用無敏變換方法計算y的一、二階矩的步驟如下:
計算2nx+ 1 個采樣點xi,及其相應的權值wi
式 中:λ為尺度參數為矩陣(nx+λ)Px開方運算的第i行或第i列向量,可以利用Cho?lesky 分解進行計算。以上采樣點集通過非線性方程得到y的采樣點集為

狀態y的均值和協方差以及y與x的互協方差,可近似通過后驗采樣點的加權值的均值和方差得到,即
由于UKF 算法沒有線性化近似過程,未忽略高階項,因此相比EKF 來說精度較高[16]。
將雷達在大地直角坐標系下的彈道目標運動方程作為狀態方程推導而來的UKF 算法在本文中被稱為BUKF。由于濾波過程中需要進行多次無敏變換,該算法計算量較大,正常情況下大約是BEKF的5~6 倍[17],但是由于其采用了彈道目標的運動方程,同時不存在線性化近似,因此估計精度是4 種方法中最高的。
2 濾波算法的仿真與分析比較
2.1 仿真場景
雷達在球坐標系下對彈道導彈的觀測誤差充分考慮了雷達威力、目標RCS(radar cross-section)、熱噪聲、量化噪聲等多項測量誤差影響因素,且假設雷達距離、方位和俯仰量測噪聲服從相互獨立的零均值正態分布,其方差按照雷達方程實時計算得到。仿真的彈道目標其射程為2 500 km,在地面雷達看來其徑向距離、方位角、俯仰角和全速度變化曲線分別如圖1~4 所示,目標再入速度最大近4.5 km/s。
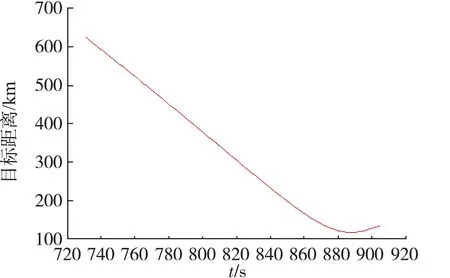
圖1 目標距離隨時間的變化關系Fig.1 Change of target range with time
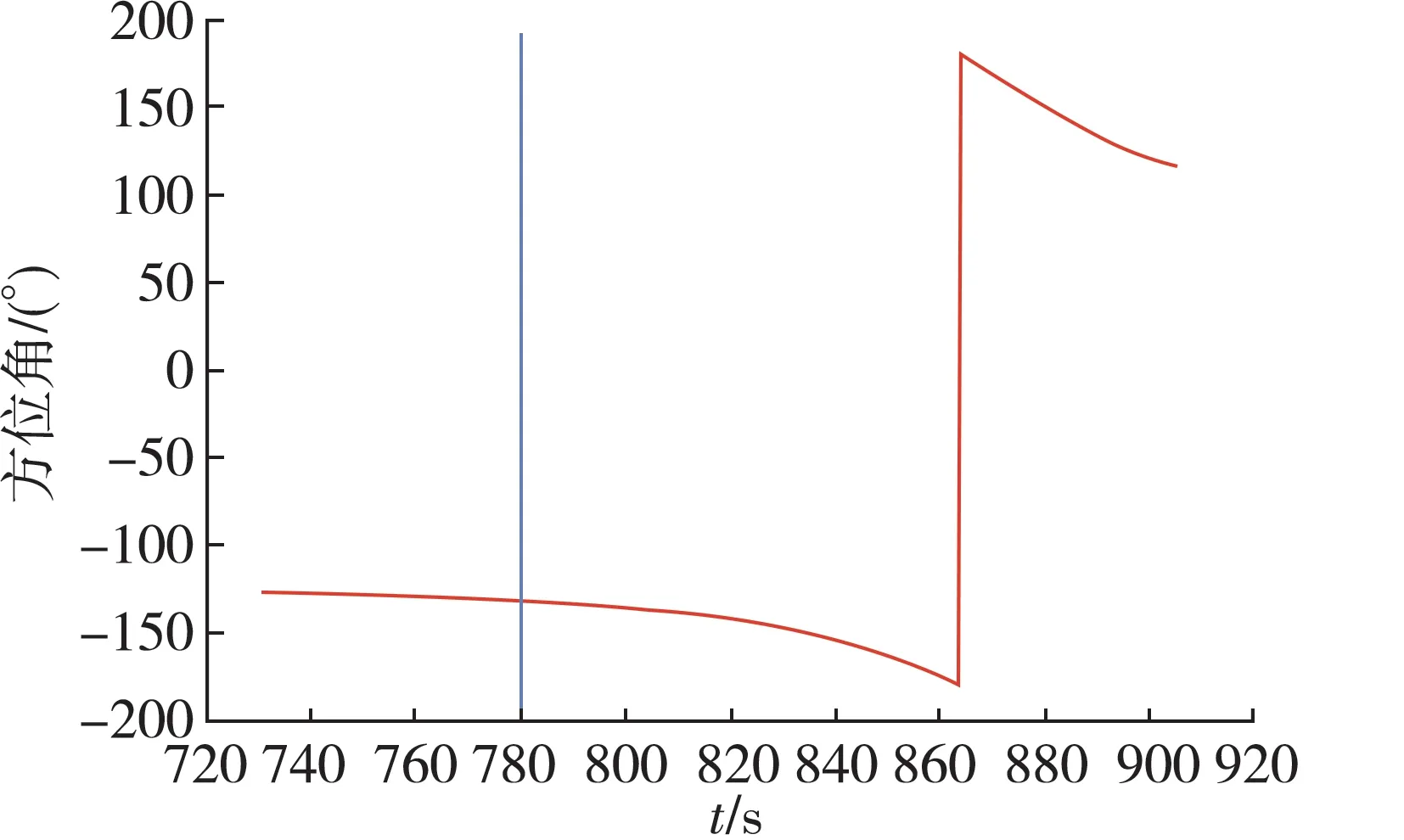
圖2 目標方位角隨時間的變化關系Fig.2 Change of target azimuth with time
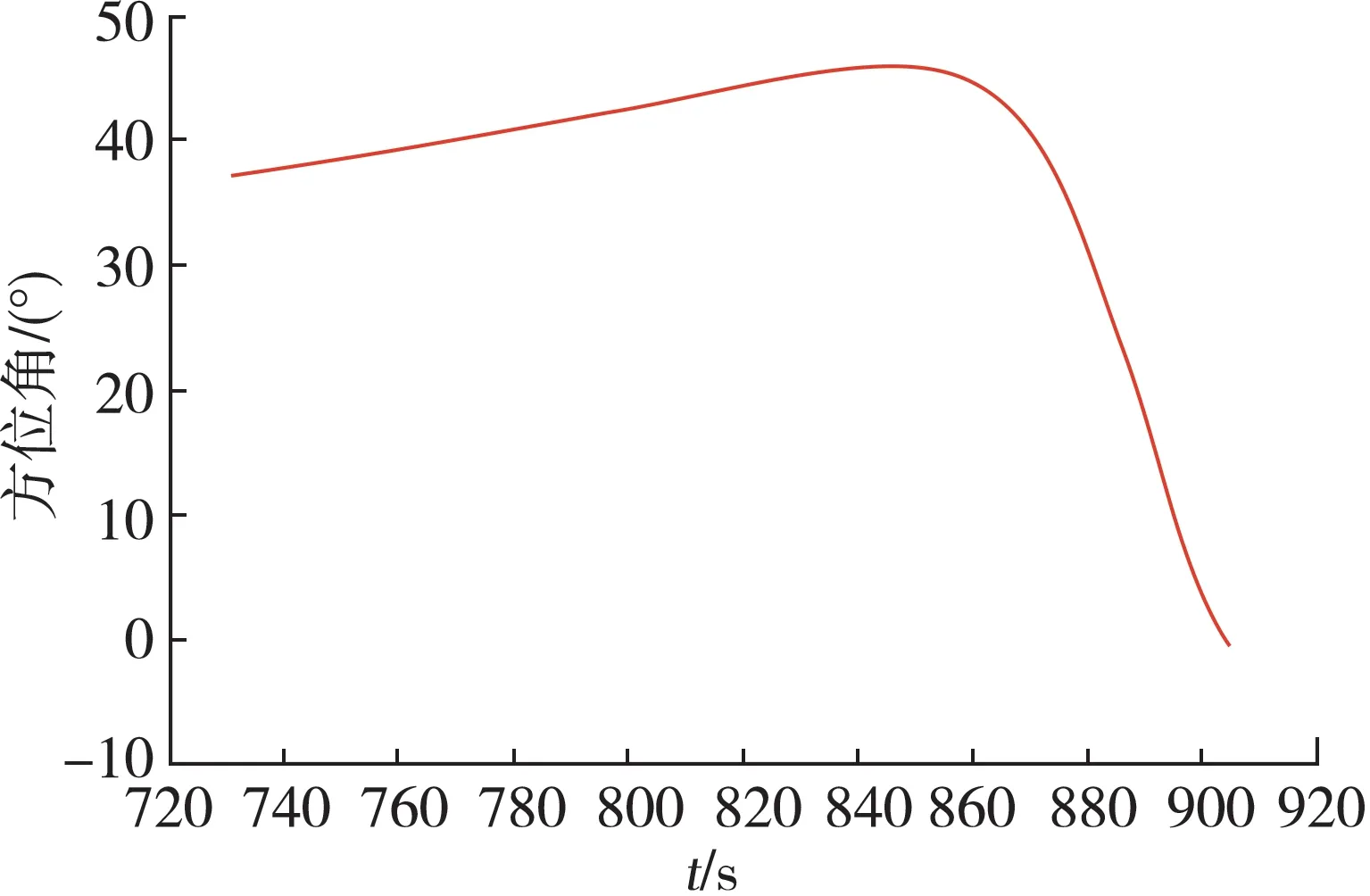
圖3 目標仰角隨時間的變化關系Fig.3 Change of target elevation with time
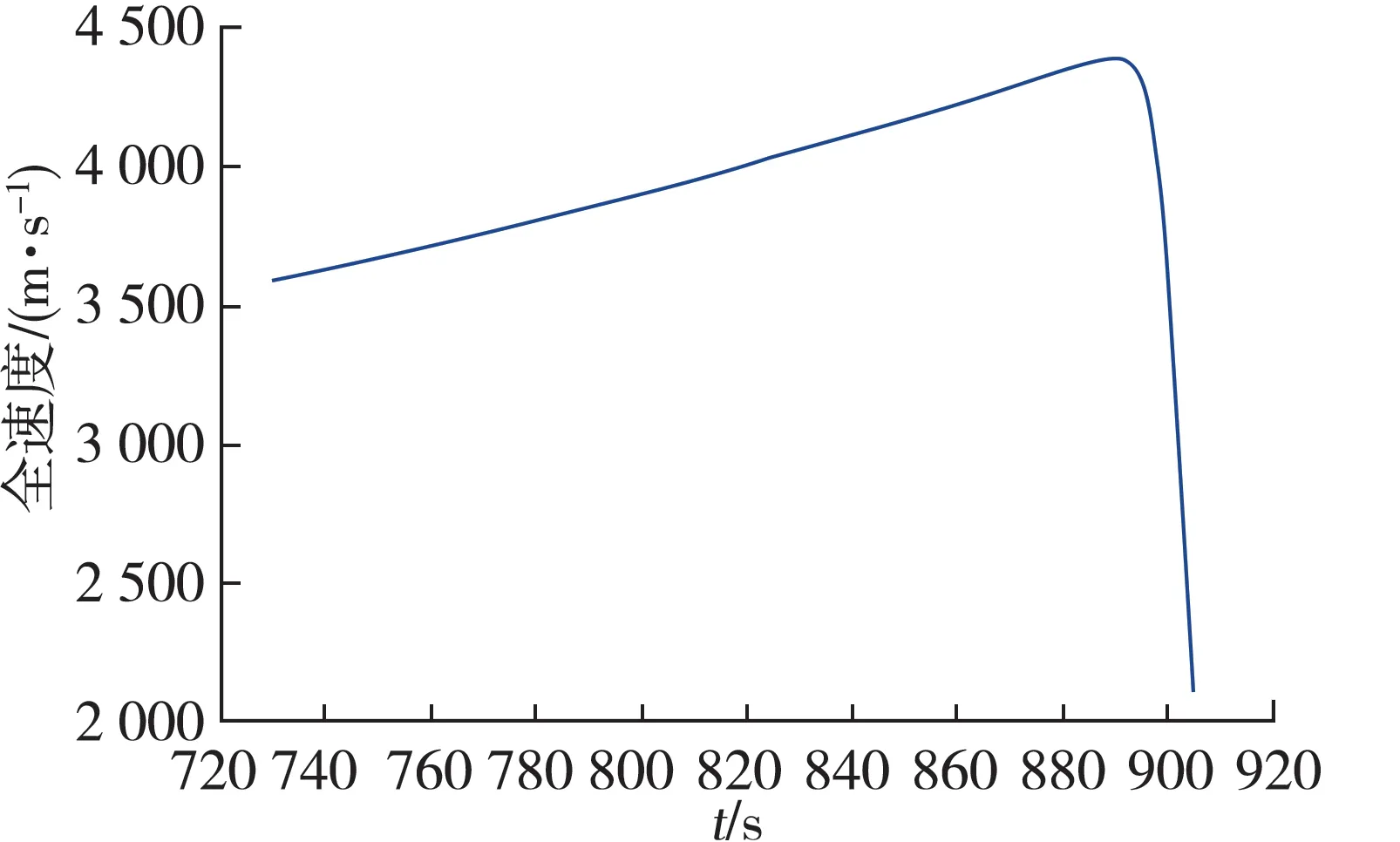
圖4 目標全速度隨時間的變化關系Fig.4 Change of target velocity with time
2.2 濾波仿真
基于2.1 節仿真場景給定的彈道目標運動及雷達測量誤差的設定下,通過50 次蒙特卡羅求RMES平均值的方法,進行CMKF,EKF,BEKF 以及BUKF 4 種濾波器的性能比較。其中,基于彈道運動方程的BUFK 濾波方法采樣點數為13,尺度參數設為0.1。4 種濾波器的濾波誤差結果如圖5~7 所示。
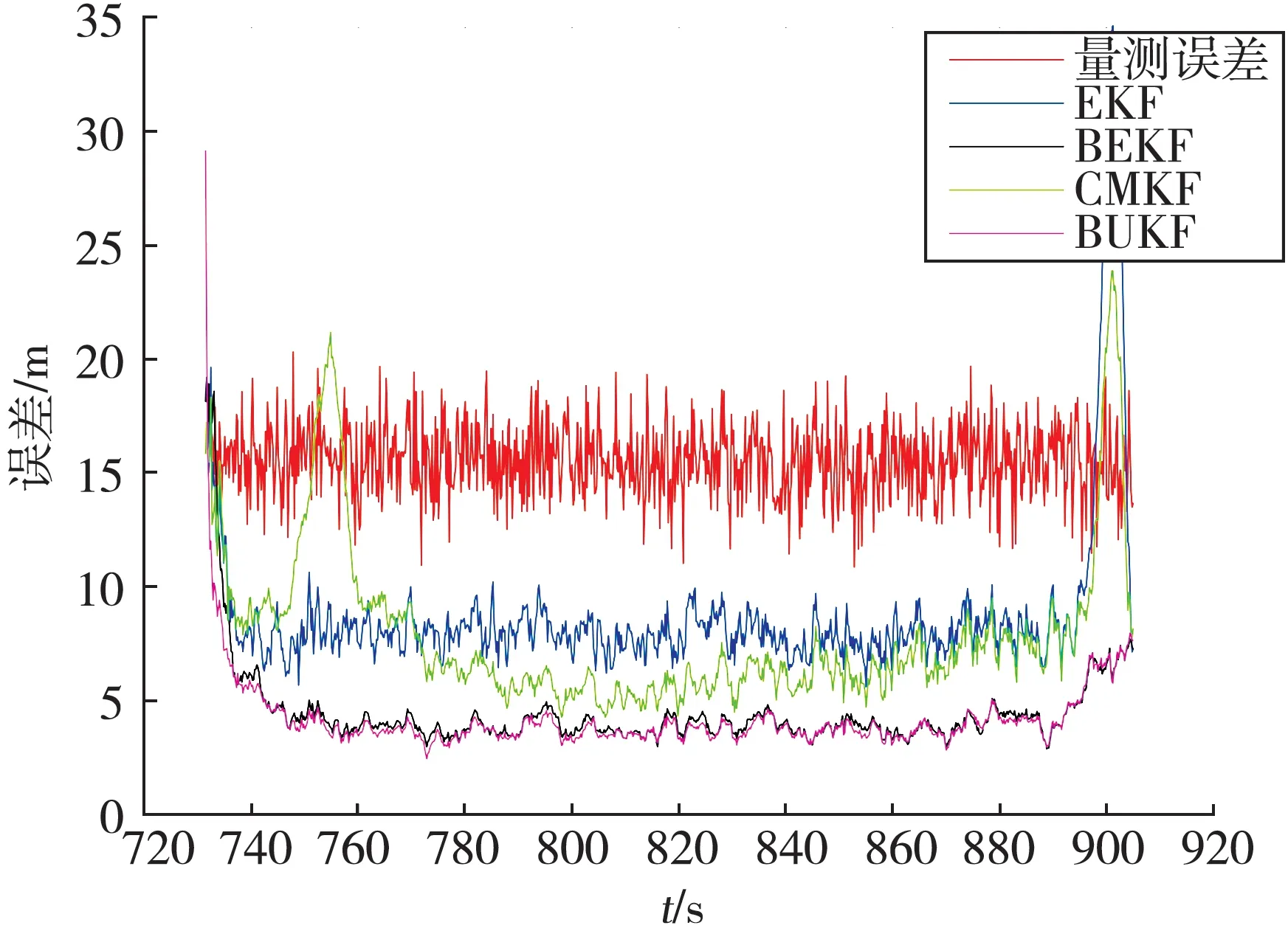
圖5 距離的均方根誤差曲線Fig.5 Range root-mean-square error
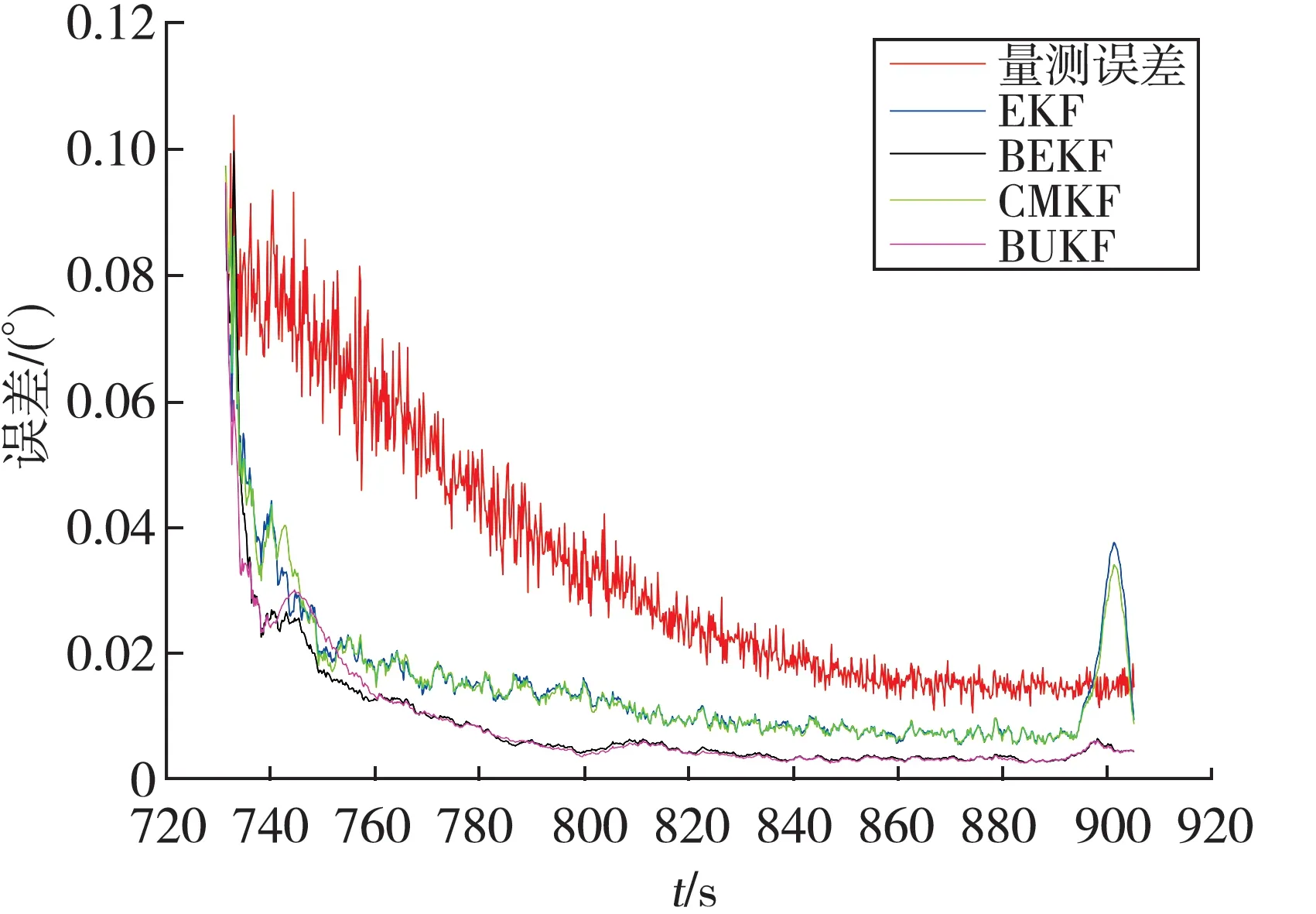
圖6 方位角的均方根誤差曲線Fig.6 Azimuth root-mean-square error
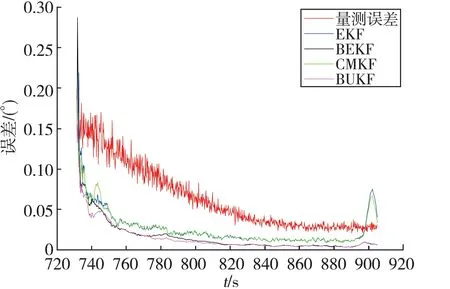
圖7 俯仰角的均方根誤差曲線Fig.7 Elevation root-mean-square error
為了特別驗證質阻比參數對BEKF 和BUKF 在目標再入段精度的影響,進行了質阻比失配條件對濾波器精度影響的仿真,如圖8~11 所示。
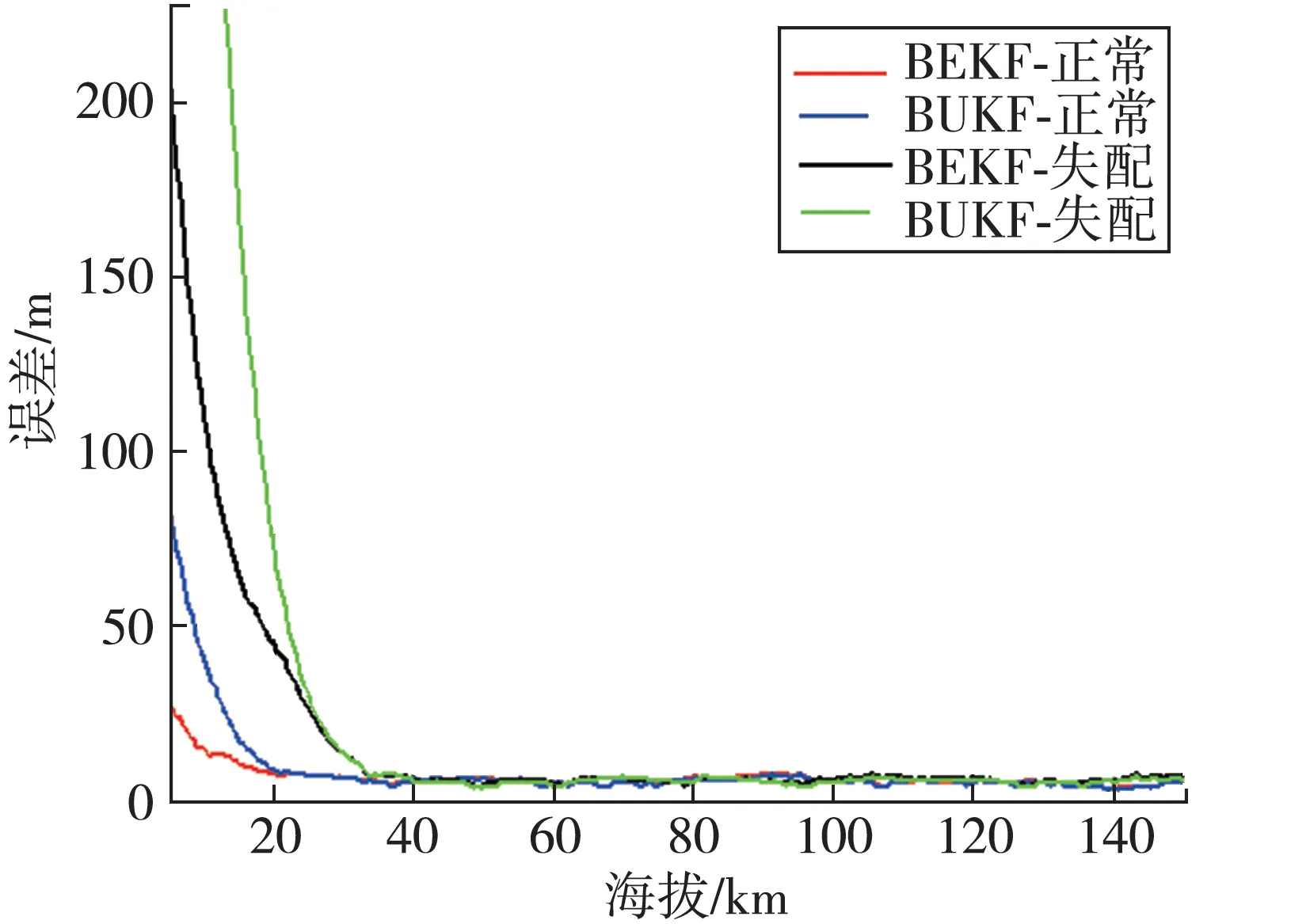
圖8 質阻比對距離的影響Fig.8 Effect of mass-to-drag ratio on range
2.3 分析比較及結論
(1)濾波精度分析時
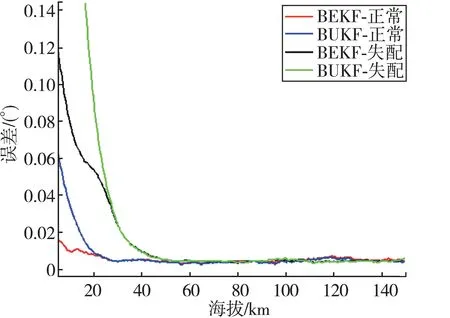
圖9 質阻比對方位角的影響Fig.9 Effect of mass-to-drag ratio on azimuth
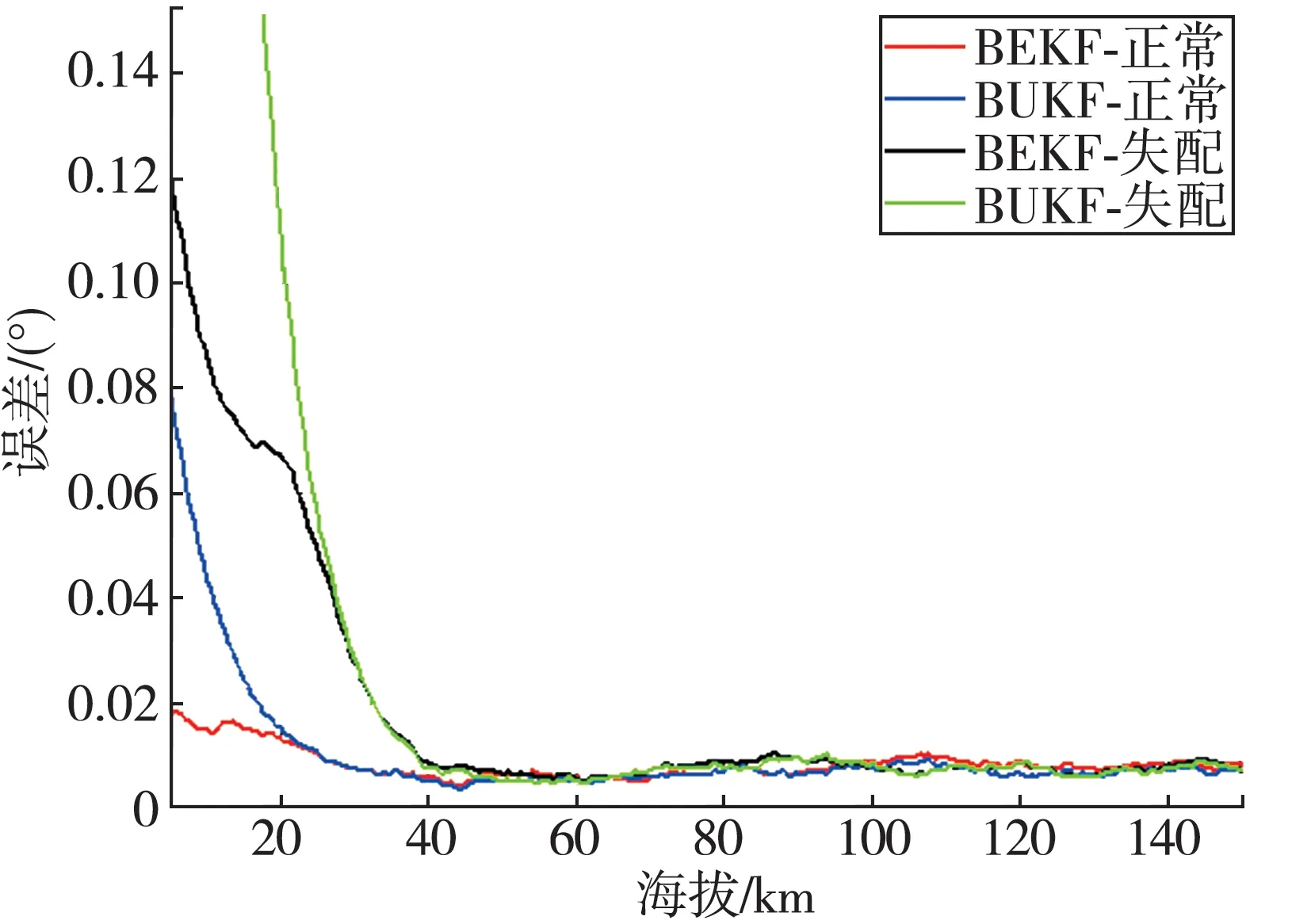
圖10 質阻比對俯仰角的影響Fig.10 Effect of mass-to-drag ratio on elevation
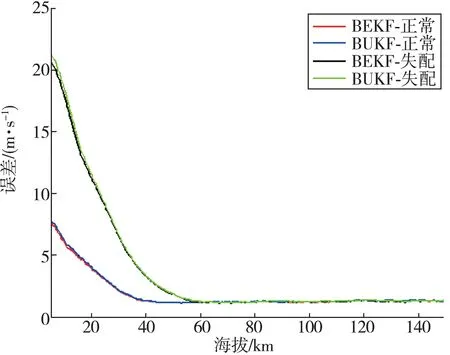
圖11 質阻比對全速度的影響Fig.11 Effect of mass-to-drag ratio on velocity
BEKF 和BUKF 都是基于彈道目標的運動模型進行的濾波,濾波精度都較高,比較而言BUKF 算法略優于BEKF,但是兩者精度相差不大。然而,UKF計算量約為EKF 的5~6 倍(運動模型不一樣還會有變化)。
CMKF 和EKF 都是采用勻加速模型,濾波精度一致。從使用角度來講,EKF 與CMKF 相比運算量較小,魯棒性更好一點。
(2)再入段跟蹤性能
由于BEKF 和BUKF 運動方程中考慮了空氣阻力的影響,同時將空氣阻力的影響動態地反映在運動方程中,因此能夠根據跟蹤情況實時調整相關參數,跟蹤性能優于基于CA 模型的EKF 和CMKF。
(3)質阻比參數的影響
在BEKF 和BUKF 中,質阻比參數對目標再入時跟蹤精度也有影響。質阻比參數與真實質阻比相差越小,濾波精度越好。在實際應用中,根據情況可選擇恰當的質阻比參數,以提升再入時濾波精度。
3 算法分析結果和體會
選擇和設計目標跟蹤濾波方法時,需要考慮幾個問題:
(1)濾波精度
濾波精度是選擇濾波算法考慮的首要指標,對彈道目標的濾波精度由高到低依次為BUKF,BEKF,EKF,CMKF。
(2)計算量
以目前的計算機水平,計算量應該不是大問題,計算量由大到小依次為:BUKF,BEKF,CMKF,EKF(后3 種計算量相差不明顯)。
(3)算法收斂速度
算法收斂速度與濾波器初值、初始協方差矩陣、運動模型、算法本身等很多因素有關,可通過調整相應參數達到快速收斂的目的。
(4)算法對不同類型目標的適應能力,即魯棒性
4 種 算 法 中,BUKF 和BEKF 采 用 彈 道 運 動 模型,對彈道目標的濾波精度較高,但是其對其他類型的目標濾波精度就會受到限制。在實際使用中,如果采用空氣動力目標如飛機進行校飛,就不能真實反映其對彈道目標的濾波效果。EKF 和CMKF 采用勻加速模型,能夠跟蹤不同類型的目標,但是其對彈道目標的濾波效果就不如BUKF 和BEKF。綜合而言,應該根據雷達的任務,在魯棒性和濾波精度方面做出選擇。
4 結束語
本文首先對彈道目標的跟蹤濾波方法進行了綜述,對4 種濾波算法的關鍵點、優缺點進行了剖析,利用仿真的彈道數據對4 種濾波方法進行了分析和驗證。分析了濾波器的濾波精度和再入目標的跟蹤性能,以及質阻比對濾波性能的影響,提高了算法的適應能力和濾波精度。最后給出選擇和設計目標跟蹤濾波方法時需要考慮的幾個問題,為雷達濾波方法的選擇和設計提供參考和依據,可指導工程應用。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56