機器視覺技術在架空乘人裝置智能控制中的應用
2022-05-14 02:49:30趙樂
機械管理開發 2022年3期
關鍵詞:智能
趙 樂
(汾西礦業集團有限責任公司靈北煤礦,山西 靈石 031302)
引言
現階段架空乘人裝置運行采用手動控制,每班需安排專人操控架空乘人裝置啟停,但是由于無法實時掌握沿途乘坐人員數量,一般架空裝置采用恒速運行方式[1-2]。雖然架空承人裝置驅動系統安裝有變頻器,但僅起到軟啟動功能,未能充分發揮節能降耗效果[3]。為此,本文提出將機器視覺技術應用到架空乘人裝置控制中,通過分析乘坐人數對架空乘人裝置運行速度進行智能控制,不僅可實現無人值守,而且有助于降低能耗。
1 山西某礦架空乘人裝置概況
山西某礦井下布置5 部架空乘人裝置,通過搭接提高地面到工作點通行效率。架空乘人裝置總的運輸里程達到26.5 km。架空乘人裝置結構主要包括防爆電機(永磁電機)、驅動輪、配重塊、牽引鋼絲繩、迂回輪架及組件等。架空乘人裝置采用變頻器控制運行,運行速度理論上可實現0~2.3 m/s,現場應用過程中架空乘人裝置多保持0.8 m/s 速度運行,主要是由于架空乘人裝置運行速度調節面臨需安排專人值守、速度調節無依據等問題。
統計數據顯示,礦井布置的架空乘人裝置年費用高達35 萬元,且架空乘人裝置在交接班期間乘人較多,平時時間乘坐人員較少。因此依據架空乘人裝置人員乘坐情況對其運行速度進行調整,可降低架空乘人裝置能耗及損失量。
2 機器視覺技術在架空乘人裝置控制中的應用
2.1 架空乘人裝置原控制方式
以井下1 號副斜井架空乘人裝置為例,對架空乘人裝置原控制方式進行分析。該架空乘人裝置運輸距離共計3.6 km,運行速度為0.8 m/s,布置傾角22°,配套電動機功率為45 kW,采用機尾重錘張緊,具體架空乘人裝置結構如圖1 所示。架空乘人裝置采用人工操作PLC 控制變頻器、電動機、驅動輪、保護器等設備運行,當架空乘人裝置停止運行后若井下人員需乘坐時,則需要通過井下IP 電話聯系調度室,再由調度員指示架空乘人裝置操作員啟動;同時當無人乘坐時架空乘人裝置仍保持原有狀態運行,存在一定程度資源浪費、無法智能控制等問題。
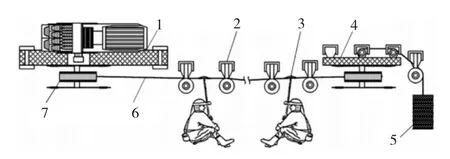
圖1 架空乘人裝置結構
2.2 機器視覺技術現場應用
為提高架空乘人裝置控制水平,提出將機器視覺技術運用在架空乘人裝置中,通過機器視覺、紅外傳感器對人員乘坐情況進行判斷,以便實現架空乘人裝置智能化控制。具體機器視覺技術應用后,架空乘人裝置控制系統結構如下頁圖2 所示。現場控制仍采用原有的就地控制器(FX-2N 系列PLC),通過增設信號轉換器讀取就地控制器運行參數,并通過新增PLC 遠程控制架空乘人裝置啟、停及運行速度。信號轉換器與新增PLC 間通過以太網接口連接,并經光電轉換模塊接入井下已有工業以太網環網。
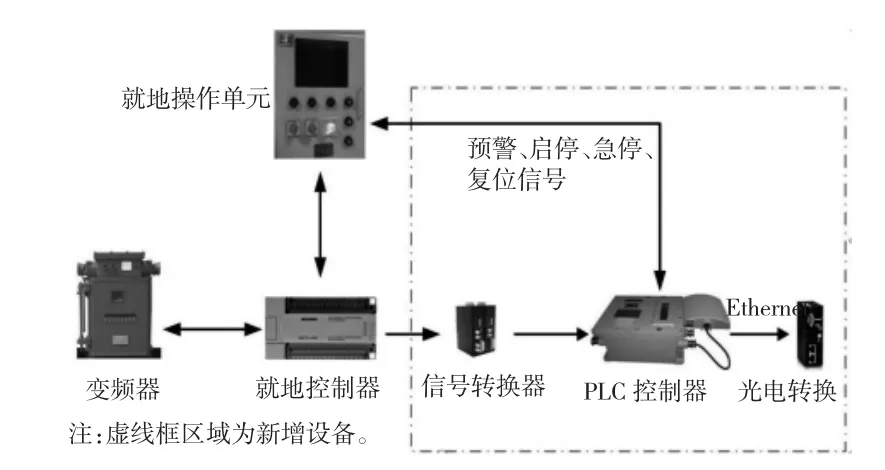
圖2 機器視覺技術應用后架空乘人裝置控制系統結構
在1 號副斜井三水平、五水平及+750 m 水平上下乘車點均安裝熱紅外傳感器、智能識別攝像頭,用以對架空乘人裝置人員乘坐情況進行監測。當架空乘人裝置有人乘坐時,熱紅外傳感器會檢測到紅外信號并經BISS0001 集成處理模塊處理后輸出繼電器常閉信號;當無人乘坐時則BISS0001 集成處理模塊輸出繼電器常開信號。
1 號副斜井智能識別攝像頭布置情況如下頁圖3所示,通過攝像頭獲取圖像并結合計算機對圖像進行分析,從而判定架空乘人裝置是否有人員乘坐。現場架空乘人裝置運行控制中以機器視覺判定為主、熱紅外傳感器監測結果為輔。通過機器視覺技術應用,可實現架空乘人裝置乘坐情況判定,并依據人員乘坐數量調節架空乘人裝置運行速度、工作狀態,以便實現架空乘人裝置運行智能控制。
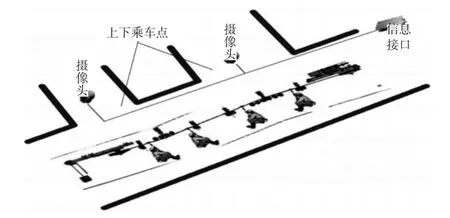
圖3 智能識別攝像頭布置位置示意圖
2.3 架空乘人裝置智能控制應用效果
2.3.1 技術優勢
1)可優化架空乘人裝置運行控制、實現智能化運行控制,降低設備能耗及磨損程度。
2)可實現架空乘人裝置無人值守,從而將專職操作員從惡劣環境中解放出來,減少井下作業人員數量。
3)通過新增設PLC、信號轉換器,可將架空乘人裝置運行參數實時傳輸至地面監控中心,調度員可實時掌握架空乘人裝置人員乘坐及運行情況。
2.3.2 現場應用效果
1)在1 號副斜井架空乘人裝置應用機器視覺技術并輔助采用熱紅外傳感器后,可實時監測架空乘人裝置人員乘坐情況,現場應用過程中人員監測結果精準度高,系統運行可靠。
2)1 號副斜井架空乘人裝置在原控制方式下每天運行時間為20 h(檢修時間4 h)。采用機器視覺技術對架空乘人裝置運行進行控制后,架空乘人裝置在無人乘坐情況下即會停止運行,每天可減少空轉時間約7.5 h、年節省空轉時間達到2 700 h,預計每年可節省電能消耗約12.2 萬kW·h,節約5.6 萬元電費。
3)架空乘人裝置累計運行超過3 000 h 潤滑油需全部更換,單次更換成本約為2.7 萬元,則年可節省潤滑油費用約2.4 萬元;同時在鋼絲繩、脫繩輪等更換方面年可節省約3.7 萬元。架空乘人裝置實現智能化控制,調度中心可遙控架空乘人裝置運行,無須值守人員,年可減少人力資源投入約18 萬元。
4)將該技術應用推廣到礦井其余的4 臺架空乘人裝置上后,預計年可節省礦井投入約160 萬元。
3 結語
控制系統采用機器視覺技術、熱紅外傳感器對架空乘人裝置人員乘坐情況進行實時監測,PLC 依據人員乘坐情況調整架空乘人裝置運行狀態及運行速度;同時地面監控中心可通過PLC、光電轉換器及工業以太網實時掌握架空乘人裝置運行狀態并遙控指揮。
現場應用后,架空乘人裝置可實現無人值守智能化運行,礦井5 臺架空乘人裝置年可節省費用約160 萬元,同時系統結構簡單、應用成本低。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44
