基于神經網絡和路側單元指紋的車輛定位方法
2022-05-14 10:27:44張月霞
計算機仿真 2022年4期
張月霞,劉 沖
(1. 北京信息科技大學信息與通信工程學院,北京 100101;2. 北京信息科技大學現代測控技術教育部重點實驗室,北京 100101;3. 高動態導航北京市實驗室,北京 100101)
1 引言
車聯網是未來智能交通系統發展的必然趨。在過去的十年里,許多智能交通應用得到了飛速的發展,如輔助駕駛、自動駕駛、車輛防碰撞、高速公路監測等。然而,這些應用需要實時且精確的車輛定位技術支撐[1]。全球定位系統(GPS)是應用最廣泛的技術之一,但GPS信號在隧道、高樓密集的街區、山區、立交橋下、惡劣天氣等場景中由于信號受障礙物阻擋導致其定位性能大打折扣,甚至無法完成定位[2]。另一方面,基于GPS的定位方法也無法滿足未來車聯網應用的定位精度需求[3]。
V2X通信是未來車聯網關鍵技術之一,其中車與基礎設施(V2I)通信是V2X通信的重要組成部分,基礎設置主要包括路側單元(RSU)與基站。以RSU為例,車輛上所搭載的車載單元(OBU)通過車聯網短程通信技術(DSRC)實現信息的高速率傳輸[4-5]。近年來,隨著車聯網定位技術的不斷發展,基于RSU的定位技術越來受到人們的關注。文獻[6]提出一種基于加權質心算法的車輛定位方法,待定位車通過對附近路側單元和已知坐標車輛的坐標進行加權來估算自身的位置坐標,其中權值的設定綜合考慮了距離及信噪比等因素;文獻[7]提出了一種基于雙RSU的測距方法,其首先利用無線測距技術提取車輛與各RSU間的距離,則待定位車輛可能位于以RSU坐標為圓心距離為半徑的雙圓交點之上,假設車輛行駛方向已知,通過RSU廣播第二輪消息后判斷待定位車輛位置;文獻[8]利用車輛自身的移動特性與固定RSU間聯立到達時間(TOA)方程,當構建方程數量達三個及以上時,通過最小二乘法對TOA方程進行解算,從而求解待定位車輛坐標;文獻[9]提出了一種基于到達角度(DOA)的車輛定位方法,待定位車輛從輔助 RSU廣播信息中解算出來波角度,并利用來波角度的正切值構建包含位置的方程組解算車輛坐標。
為進一步提升定位精度,本文提出一種基于神經網絡和RSU指紋的車輛定位方法。該方法將車輛所行駛的路段均勻劃分為若干柵格區域,在每個柵格區域處采集不同RSU的接收信號強度(RSSI)。將所采集的RSSI作為特征值、各柵格點所對應中心坐標作為目標值構建BPNN,并估算該網絡的最大預測誤差值。定位階段,待定位車輛將自身接收到各RSU的RSSI輸入構建好的BPNN,并以其輸出坐標為圓心,BPNN的誤差最大值為半徑,在約束范圍內進行指紋定位來確定待定位車輛的精確位置坐標。該方法適用于對車輛定位精度要求較高的應用場景及GPS定位盲區,也可與其它定位方法相結合,實現高精度融合定位。
2 定位系統
2.1 車輛定位模型
本文所利用的車輛定位模型如圖1所示,在雙向二車道模型中,若干RSU交替等距部屬于道路兩側且位置坐標已知,RSU在其通信范圍內周期性地廣播包含自身標識的數據包。網絡中若干車輛在服從交通規則的情況下自由行駛于道路之中。
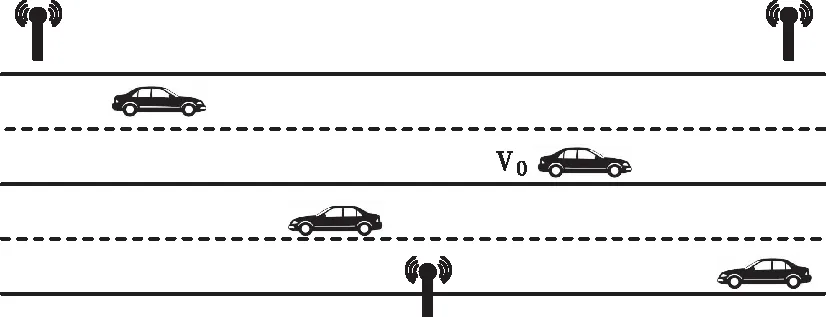
圖1 車輛定位模型
設RSU總數為N,其中第n個RSU的坐標可表示為
Rn=(xn,yn) 1≤n≤N
(1)
設車輛V0為搭載OBU的待定位車輛,其坐標可表示為(x,y),車輛與RSU之間的通信遵循2.2節所示DSRC鏈路模型。
2.2 DSRC鏈路模型
RSU與車輛之間的DSRC鏈路模型可用自由空間模型進行描述,其具體表達式可通過Friis公式[6]表示
(2)
在上式中Ps、Pr分別為RSU的發射信號功率及待定位車輛的接收信號功率,λ為信號的波長,d為RSU與待定位車輛間的距離,β為系統損耗因子,Gs、Gr為天線增益,車聯網環境中通常設Gs=Gr=β=1為默認值[6],波長λ可如下表示
(3)
其中C是真空中光速(299,792,458m/s),f為信號傳播的頻率。式(2)中功率單位為瓦特,將其進一步改寫為式(4)所示dB形式[10]

(4)
3 定位方法描述
3.1 構建RSU指紋庫
將定位區域平面均勻劃分為M個四邊形柵格區域。在RSU指紋庫的構建階段,分別在每個柵格區域的中心處測量該位置所接收到不同RSU的RSSI并存儲到數據庫之中作為參考指紋點。指紋庫中第m(m≤M)個參考指紋點可如下表示
Fm=(m,xm,ym,Pm1,…,PmN)
(5)
xm與ym為第m個參考指紋點的實際位置坐標,PmN為第m個參考指紋點處所接收到第N個RSU的RSSI。因此,所構建的RSU指紋庫FB可如下表示
FB=(F1,F2,…FM)T
(6)
3.2 BPNN的訓練
將RSU指紋庫中指紋信息作為構建BPNN的訓練集,用來訓練神經網絡。其中神經網絡的特征值和目標值分別為指紋點所接收到不同RSU的RSSI和指紋點的位置坐標。本文所構建的BPNN包含輸入層、隱含層及輸出層。
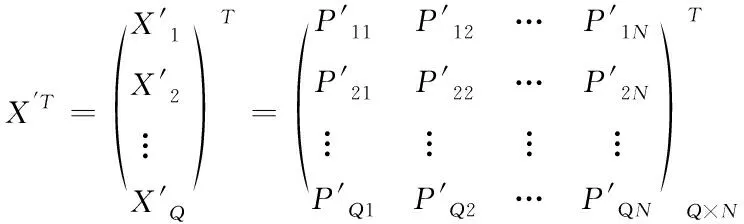
設BPNN輸入層神節點數量s0=N,在訓練階段,需將指紋庫中RSSI矩陣輸入網絡中進行訓練。設建模過程中輸入矩陣為XT,可表示為
(7)
其中XM=(PM1,PM2,…,PMN)為指紋庫中第M個指紋點所接收到N個RSU的RSSI向量。
設BPNN的輸出層節點數量s2=2,在BPNN的訓練階段,輸出層通過將XT經BPNN的所得輸出值與各指紋點橫縱坐標間的誤差進行反向傳播,對神經網絡各層權值與閾值進行修正,使神經網絡可以更好地擬合訓練集中RSSI與位置坐標間的非線性關系,提升網絡性能。
BPNN隱含層節點數數量s1可由式(8)所示經驗公式求得

(8)
其中,s0和s2分別為輸入層及輸出層節點數量,α為 0~10之間的調節常數。隱含層與輸出層的激勵函數f1(x)和f2(x)分別選擇S函數Sigmoid及線性傳遞函數purelin;wij與b1i分別表示神經網絡中隱含層和輸入層間的權值及閾值,而Wli與b2l分別表示神經網絡中輸出層和隱含層間的權值及閾值
因此,本文所構建的BPNN拓撲結構如圖2所示。
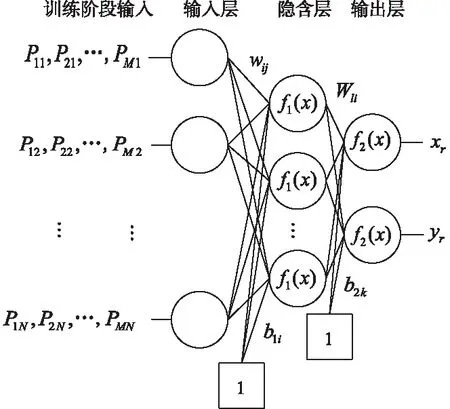
圖2 BPNN拓撲結構
由上圖可知,神經網絡隱含層中第i個節點的輸出a1i如下所示

(9)
其中pj=(P1j,P2j,…,PMj)為輸入層第j個節點的輸入向量,輸出層第l個節點的輸出值a2l如下所示

(10)
性能函數為軍方誤差函數其定義如下

(11)
tl用來表示訓練集各指紋點所對應坐標值,由于s2=2,故當l=1時,tl表示對應指紋點橫坐標值;l=2時,tl表示對應指紋點縱坐標值。
在BPNN的訓練過程中,若每次正向傳播輸出值與實際值間的的均方根誤差值大于誤差閥值時另該誤差反向傳播,并通過梯度下降法修正BPNN的權值和閾值,直到正向傳播滿足誤差閥值要求或達到指定迭代次數后訓練結束。
3.3 確定指紋匹配半徑
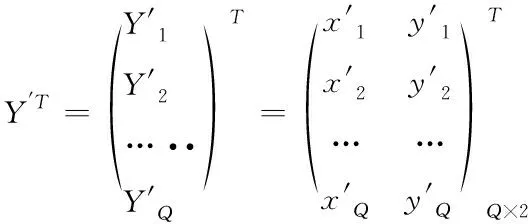
在定位區域隨機選擇Q個點進行采樣,用來確定后續指紋匹配算法的匹配半徑,其中每個采樣點表示方法同式(5)所示。
將Q個采樣點對應的RSSI矩陣輸入訓練好的神經網絡中,其中輸入X′T可如下表示
(12)

(13)
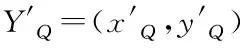

(14)
其中(xQ,yQ)為第Q個采樣點的實際坐標。分別計算Q個采樣點的的定位誤差,并將最大誤差值rmax=max{r1,r2,…,rQ}作為指紋定位的匹配半徑εr。
3.4 車輛實時定位
3.4.1BPNN粗定位
定位階段,假定待定位車輛V0所接收到各RSU的RSSI向量為
Xr=(Pr1,Pr2,…,PrN)
(15)

Yr=(xr,yr)
(16)
橫坐標xr可表示為
縱坐標yr可表示為

(18)
其中wij、Wki、b1i、b2k分別為BPNN訓練完成后最終的權值和閾值。
3.4.2 指紋精確定位
以神經網絡的預測坐標Yr為匹配圓心,采樣點最大誤差值rmax為匹配半徑εr,確定局部指紋匹配范圍S,具體如圖3所示。
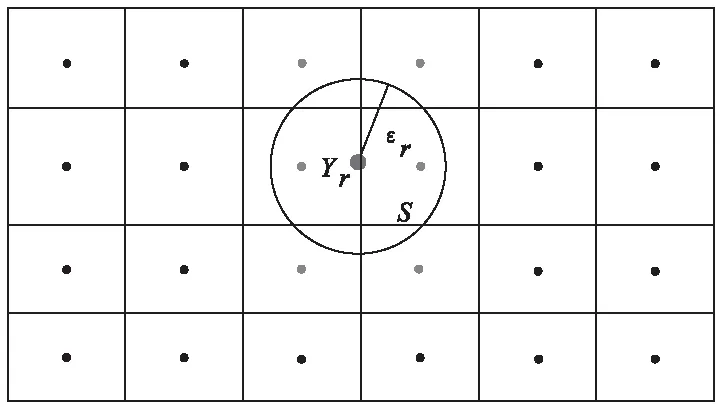
圖3 局部匹配范圍示意圖
設局部范圍S內指紋點個數為H,Rh為第h(h≤H)個指紋點接收到各RSU的RSSI向量。分別計算H個指紋點所對應RSSI向量與Xr的相似度,相似度的衡量標準是Xr與S區域內各指紋點中RSSI向量間的歐式距離,Xr與Rh間的歐式距離L2如下所示

(19)
其中,‖‖2為二范數算子,其數值越小則向量間相似度越高。將Xr與S內H個指紋點的RSSI向量進行指紋匹配,設第k(k≤H)個指紋點中的RSSI向量與Xr間具有最高匹配度,該指紋點對應的真實坐標為Tk(xk,yk)。令待定位車輛的最終位置坐標T(x,y)等于局部范圍S內第k個指紋點的真實坐標,即待定位車輛最終位置坐標T(x,y)可表示為
T(x,y)=Tk(xk,yk)
(20)
4 仿真結果及分析
為驗證本文所提方法性能,在MatlabR2016a中進行數值仿真。設四車道模型中單車道寬度L1=3.75m;四個RSU交替部署于道路兩側1m處,其中RSU1~RSU4的發射功率為40dB,位置坐標分別為(0,0)、(200,17)、(400,0)、(600,17)。在210~390的橫坐標范圍及1~15的縱坐標范圍內構建大小為2700m2的定位區域,設定位區域位于四個RSU的有效通信范圍內。在定位區域中均勻構建邊長L2=5m的柵格區域,取每個柵格區域的重心作為參考指紋點,其中參考指紋點總數為108。默認RSU與OBU間通信距離為視距距離,記錄各參考指紋點的坐標及接收RSSI值,構建RSU指紋庫。RSSI值可由2.2節中DSRC信號路損模型計算求得。
設神經網絡最大訓練次數為1000,學習率為0.02,參數α=1。利用指紋庫中數據對BPNN進行訓練,并將Q=300個采樣點的的RSSI值輸入訓練完成的BPNN,記錄其輸出的預測位置坐標值。通過計算Q個采樣點的預測坐標與真實坐標間的差值,繪制該仿真場景下本文所構建BPNN的定位誤差分布,具體如圖4所示。
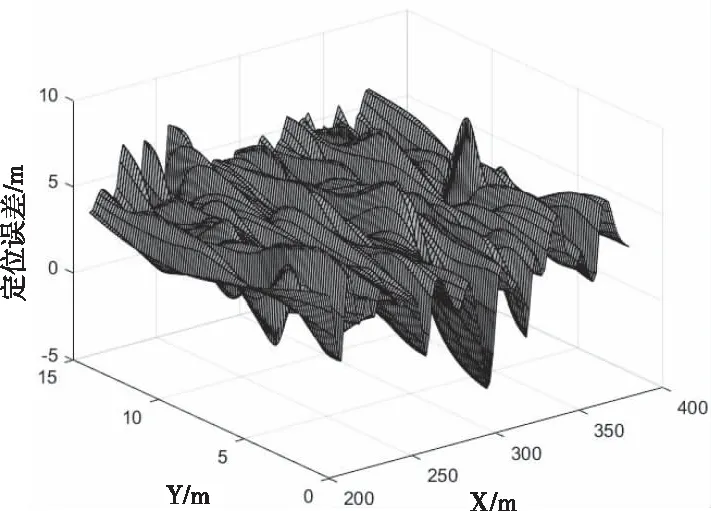
圖4 BPNN定位誤差分布圖
由上圖可計算求得,本文所構建BPNN的平均定位誤差為3.6278m,最大定位誤差rmax為6.9397m,令誤差半徑等于最大定位誤差值,即εr=rmax。
以BPNN預測坐標為圓心,εr為誤差半徑,構建局部指紋匹配范圍S。在S內,進一步利用指紋匹配方法求解待定位車輛的精確坐標。其中定位誤差隨實驗次數變化折線如圖5所示。

圖5 本文方法定位誤差折線圖
由上圖可計算求得本文所提車輛定位方法的平均定位誤差為2.45m,與基于BPNN的車輛定位方法相比,平均定位精度提高了32.5%。為了進一步論述本文所提定位方法的定位性能,通過對比仿真,繪制本文定位方法、BPNN定位方法及無多徑干擾的GPS定位方法的的累計誤差分布,具體如圖6所示。
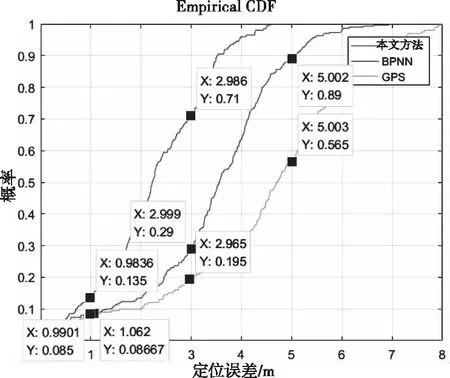
圖6 不同定位方法累積誤差分布
從圖6可看出,本文所提定位方法、BPNN定位方法、無多徑GPS定位方法,定位誤差小于1m的概率分別為14%、9%、9%;定位誤差小于3m的概率分別為71%、29%、20%;定位誤差小于5m的概率分別為100%、89%、57%。因此,本文所提車輛定位方法在定位精度方面與BPNN定位方法、無多徑GPS定位方法相比具有更好的表現。
另一方面,傳統指紋定位方法在指紋匹配階段中,待定位車輛接收信號強度向量需與待定位區域內的所有指紋點進行指紋匹配,這在待定位區域范圍較大即指紋點數量較多時會耗費較大的指紋匹配時間。而本文所提方法在指紋匹配階段中,待定位車輛接收信號強度向量只需與局部范圍內較少的指紋點進行指紋匹配,大大節約了指紋匹配時間,提高了定位的實時性。
5 總結
為解決車聯網中常見車輛定位方法定位精度較低問題及GPS定位盲區的車輛定位問題,本文提出了一種基于神經網絡和RSU指紋的車輛高精度定位方法。仿真結果表明,所提方法平均定位誤差為2.45m,與基于BPNN的定位方法相比,平均定位精度提升32.5%。現階段,車輛高精度定位問題是車聯網的重要研究方向之一,其定位性能決定著車聯網未來的發展與前景。而隨著科技的不斷發展,利用人工智能、融合定位等手段去提升車輛的定位性能也必然會成為未來車聯網的重要研究方向。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52