下肢康復訓練機器人膝踝協調運動控制方法
2022-04-27 06:17:30邢艷麗
機械設計與制造 2022年3期
邢艷麗,亢 瑾
(1.衡水學院,河北 衡水 053000;2.華北理工大學,河北 唐山 063210)
1 引言
在醫療保健水平不斷提高背景下,下肢康復訓練機器人逐漸進入人們視野,下肢康復訓練機器人屬于醫療機械范疇,能夠協助運動功能受損患者進行康復訓練,在大腦皮層中重塑運動神經記憶,使患者漸漸恢復運動能力。其涉及傳感器、計算機、人工智能等多種技術,因此它在恢復下肢運動功能方面發揮出化學藥物無法替代的作用。但是,傳統的康復機器人操作較為復雜,患者通常是較為被動地跟隨系統做訓練,不能根據人體自然狀態進行協調運動,所以在臨床推廣中受到一定阻礙。為此,相關學者提出如下方法。
文獻[1]提出康復機器人個性化步態規劃方案。根據旋量理論構建運動模型,對機器人關節運動路徑進行統一規劃,調整軌跡與運動速度,通過對步態參數的實時采集和軌跡跟蹤,該方法確保步態調整規劃符合人體行走的生理特征。文獻[2]研究一種通過上肢控制對側受損下肢的康復訓練方式。利用系統測量正常行走時上肢的肩部、肘關節轉角以及下肢的髖、膝關節轉角,得到人體上、下肢步態運動路徑,并對其做包絡分析獲得參考曲線,使用模糊理論建立上肢與下肢運動之間的主從映射關系,得出下肢運動的輸出值。但是上述控制方法只是考慮了下肢肌群意識,并未考慮下肢康復訓練機器人的不確定性,無法最大程度實現協調運動。
基于此,提出一種自適應迭代控制的下肢康復訓練機器人膝踝協調運動控制算法。迭代學習控制具有人工智能與自動控制的綜合優勢,經過不斷重復控制,修正控制律。將自適應控制方法與其相結合,能夠獲取大量和模型相關的經驗信息,克服迭代算法局限性,適用于具有重復運動性質的被控目標。此研究的提出為下肢殘疾人士提供性能優良的產品,同時促進理療福利事業的發展。
2 膝踝關節運動學分析
2.1 標識點數量與位置設置
為了準確計算下肢康復訓練機器人步態特征參數,設置標識點數量與位置對計算結果精度起到很大影響。在設置標識點時,必須遵循下述四項原則:(1)標識點需面對傳感器,不要出現遮擋現象;(2)所選標識點需覆蓋全部待測試的下肢骨骼與關節;(3)標識點運動需要和骨骼、關節的運動相一致;(4)要滿足數據處理與步態特征參數計算[3]。
按照以上原則,在被測下肢康復訓練機器人設置五個標識點,分別在髖關節、膝關節、踝關節的外側轉動中心各選一個,此外在足背前側與后端分別設置一個。在行走過程中,A、B、C、D、E五個點隨人體下肢一起運動,其位移狀況會被傳感器記錄,獲取下肢骨骼與不同關節的運動信息[4]。構建完全體現下肢剛體模型運動的局部坐標系,如圖1所示。
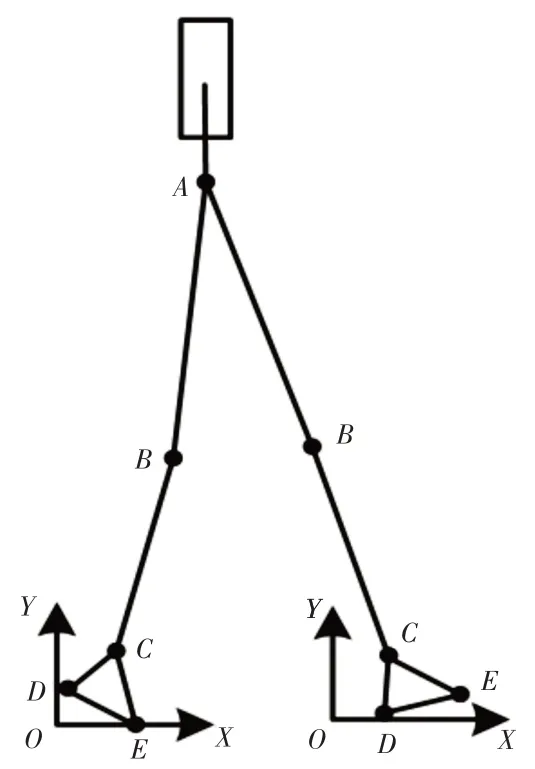
圖1 下肢剛體模型運動局部坐標系Fig.1 Moving Local Coordinate System of LowerLimb Rigid Body Model
令坐標系的XOY平面位于矢狀面,且Y軸正方向豎直向上。這時下肢模型中連桿在矢狀面的運動狀況只和X、Y坐標有關。其中,A、B、C三個點能夠體現髖、膝、踝三個關節的運動軌跡,A、B兩點的連線在矢狀面的投影和大腿連桿中心線相吻合,表示大腿,B、C兩點的連線代表小腿;C、D、E三點組成的三角形為足,線段和足底相互平行。
2.2 步態特征參數計算
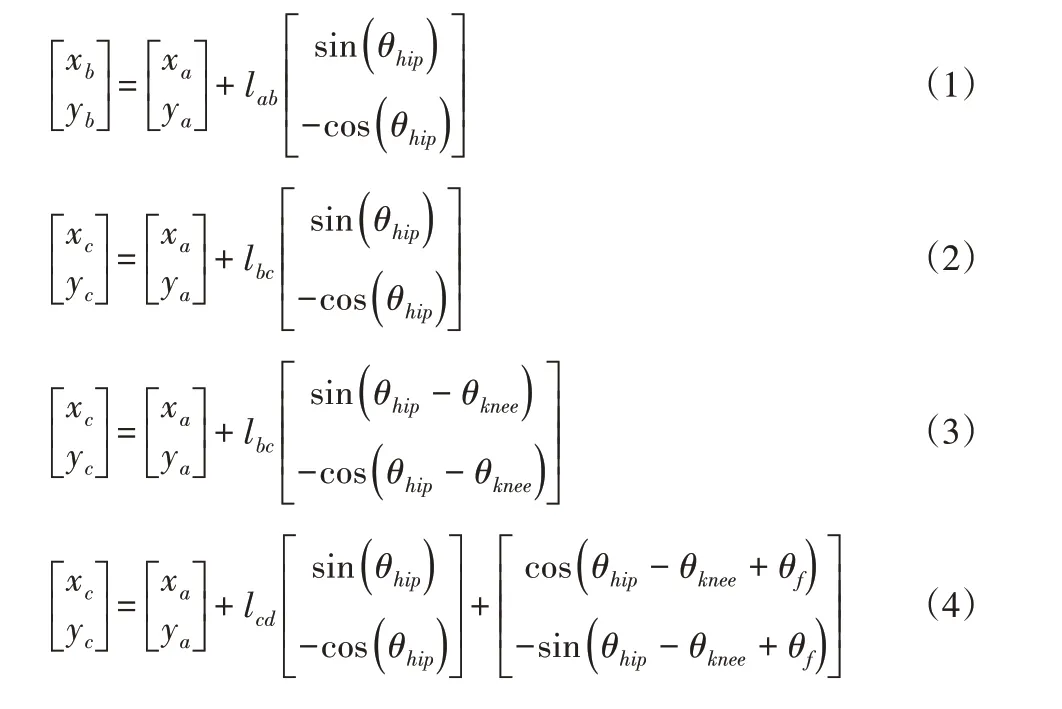
設置標識點數量與位置后,利用運動捕捉系統對標識點的空間坐標進行測試,獲取步態特征參數。假設單側下肢剛體模型中五個標識點在坐標系中的坐標分別為A(xa,ya,za)、B(xb,yb,zb)、C(xc,yc,zc)、D(xd,yd,zd)、E(xe,ye,ze),相鄰標識點的長度分別表示為lab、lbc、lcd、le d以及le c,髖關節、膝關節與踝關節角描述為θhip、θknee與θankle,的垂線和之間的夾角記做θf,與之間的夾角是θn,因此A、B、C、D四個標識點在矢狀面的運動學方程表示為:
由于θn是C、D、E三個標識點組成的三角形內角,且均粘貼在足的外側,所以這些點之間的相對位置不會發生改變[5],則θn的計算公式為:

結合θankle和θf角度正方向定義,明確兩者之間需要符合下述關系:

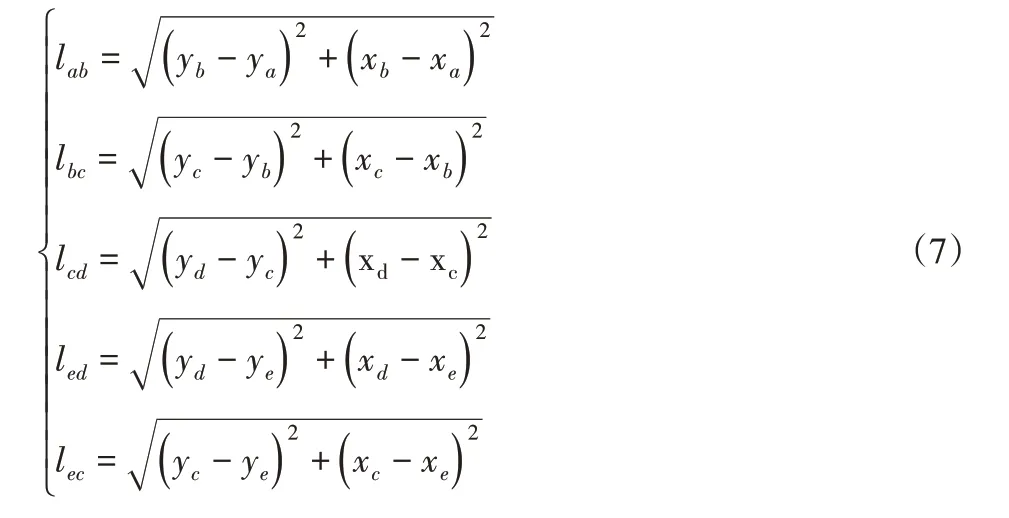
因此相鄰標識點的連接線長度lab、lbc、lcd、led、le c的表達式為:
通過上述公式做運動學反解,獲得θhip、θknee與θankle三個關節的數學表達式:
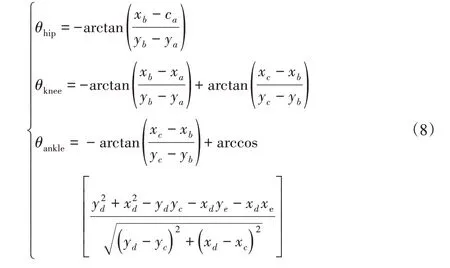
在獲取θhip、θknee與θankle值后,根據相鄰標識點之間的長度,結合獲得所需的步態特征參數。
2.3 膝踝關節轉角數學建模
利用步態特征參數,分別構建膝關節與踝關節的轉角數學模型。膝關節轉角變化趨勢由兩個波峰構成,且波峰的峰值相距較遠,每個波峰的中心均不完全對稱[6]。由此可以得出一個步態周期膝關節轉角變化軌跡和高斯函數曲線的波分特征較為相近,可通過高斯函數,實現膝關節轉角數據擬合。但是由于高斯函數基本形式為單峰曲線,無法同時對不對稱的波峰曲線進行擬合,因此建立一種高斯函數擴展形式,來擬合此種非中心對稱的雙峰曲線,函數表達式如下:

式中:x'—函數自變量;a'、b'、c'—常數系數。
將膝關節轉角非中心對稱的雙峰曲線函數表達式作為基礎,構建膝關節轉角數據的數學模型為:

式中:P—步態周期百分比數值,其取值區間是[0,100]。
(2)踝關節轉角模型
踝關節與膝關節的轉角有所不同,當使用單一函數對其進行擬合時,獲得的擬合曲線會有偏差[7]。為確保模型精度,利用分段曲線擬合形式對踝關節轉角參數進行擬合。根據自變量取值區間的差異進行分段表示,獲得一個較為完整的擬合結果。假設,存在實數a',b'1,b'2,…,b'i-1,c',且符合,若函數f(x')在區間[a',c']上存在定義,則踝關節轉角模型表示為:
3 基于自適應迭代學習的膝踝協調運動控制
3.1 迭代學習控制
根據膝踝關節運動學特征,利用自適應迭代控制算法實現膝踝協調運動。在該算法中,一般情況下將膝踝關節運動特性變換為以下形式:

式中:x''∈Rn;u∈Rr;y''∈Rm;f'、g—對應維數的矢量函數。根據迭代控制理論能夠描述為:針對一個被控系統,已知期望輸出值為,存在與其相對的期望輸入ud(t)以及每次運動的原始狀態,需經過多次反復運行(K→∞),獲得用于修正控制的學習率[8],確保系統控制輸入在時間t∈[0,T]內收斂,使系統輸出為在迭代學習控制過程中需先假設符合以下條件:
期望軌跡是設定好的并且已知;相鄰兩次計算時間需固定;原始狀態始終保持不變;只能具有一個控制輸入u(d t);每次的計算輸出結果都能夠被測出。
基于上述假設,迭代控制算法構建了一系列迭代控制序列信號[9]{uk},它和任意一個能夠實現的控制信號u*(t)之間存在較小誤差,且u*(t)屬于下述公式的最佳解:

結合假設條件,對膝踝運動軌跡進行第k次跟蹤時,公式(13)變換為下述形式:

則輸出誤差表示為:

合理利用輸入誤差e'k(t)與控制輸入uk(t),得出下次跟蹤時的控制輸入:

確保當k→∞時在t∈[0,T]區間內:

3.2 自適應迭代學習控制方法
但是上述方法只能通過提高學習速率來減少迭代次數,收斂性能較差。為此,將自適應算法引入到迭代控制中,自適應修正訓練機器人運動控制期望軌跡,解決運動控制連續步態協調問題,從而提高控制性能,確保膝踝協調運動。
由膝踝動力學方程可知,膝踝協調運動就是在有限時間間隔[0,T]內能夠反復進行正常平地的行走任務,利用公式表示為:


式中:σ—正規矩陣。
4 實驗數據分析與研究
為了驗證下肢康復訓練機器人膝踝協調運動控制方法的有效性,實驗利用北方數碼公司(Northern Digital Inc.Canada,NDI)的Optotrak Certus主動式光學運動捕捉系統對標識點的空間坐標進行測試。下肢康復訓練機器人采用三段式腿結構,髖關節、膝關節和踝關節均為串聯彈性驅動關節,下肢康復訓練機器人結構,如圖2所示。
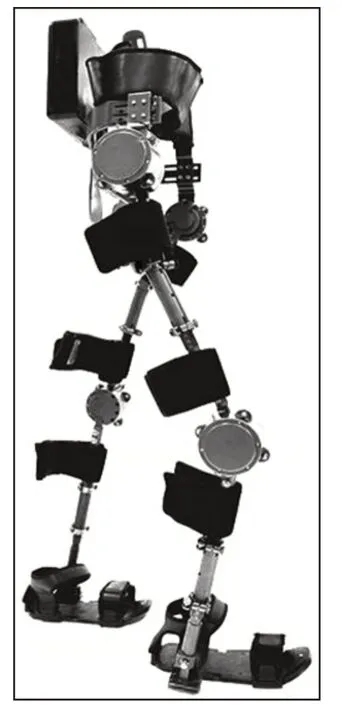
圖2 下肢康復訓練機器人結構Fig.2 Robot Structure of Lower Limb Rehabilitation Training
下肢康復訓練機器人物理參數,如表1所示。
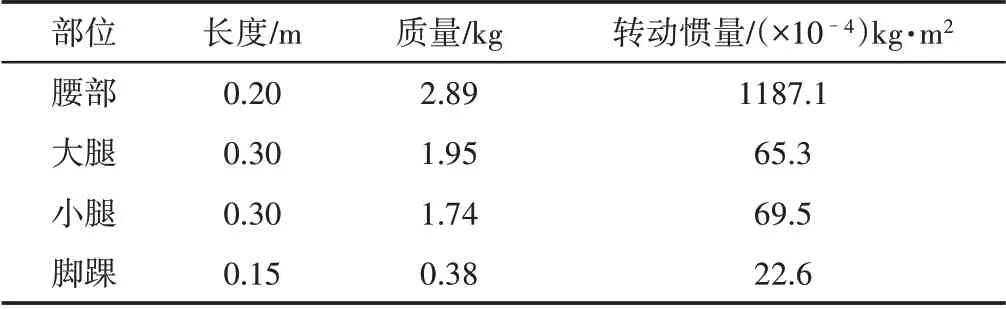
表1 下肢康復訓練機器人物理參數Tab.1 Physical Parameters of Rehabilitation Training Robot
此次實驗,主要分析膝踝協調運動的控制效果,分別采用文獻[1-2]和這里方法,對比經過不同迭代次數后,不同方法的膝踝協調運動控制效果和膝踝協調運動速度誤差結果,如圖3、圖4所示。
由圖3和圖4可知,這里方法的膝踝協調運動連續步態較為協調,膝踝協調運動控制效果較好,顯示出較好的速度控制效果,能夠在較短時間內,使速度誤差控制在要求范圍內。這是因為這里對迭代控制算法進行一定改進,通過自適應控制策略獲得大量相關經驗信息,提高控制性能,確保膝踝協調運動。
圖3 不同方法的膝踝協調運動控制效果Fig.3 Effect of Knee-Ankle Coordination Motion Control by Different Methods
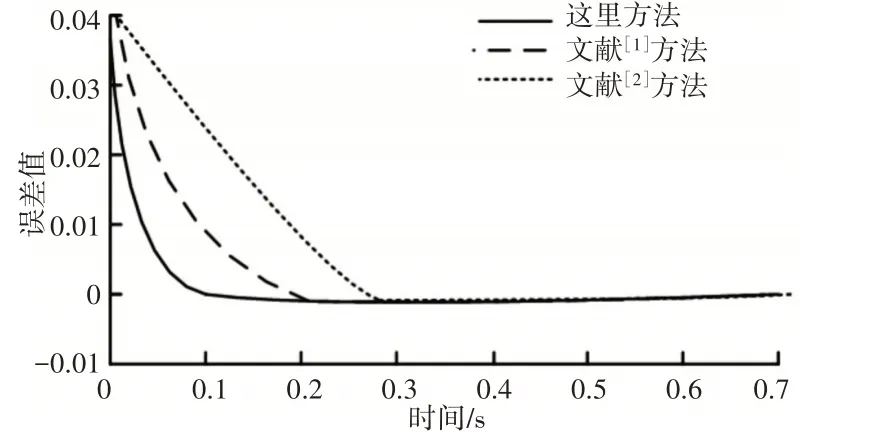
圖4 不同方法的膝踝協調運動速度誤差Fig.4 Velocity Error of Knee Ankle Coordinated Motion with Different Methods
在此基礎上,進一步對迭代控制位置誤差進行測試。這里方法在經過3次迭代后,膝關節與踝關節的迭代控制位置誤差,如圖5、圖6所示。
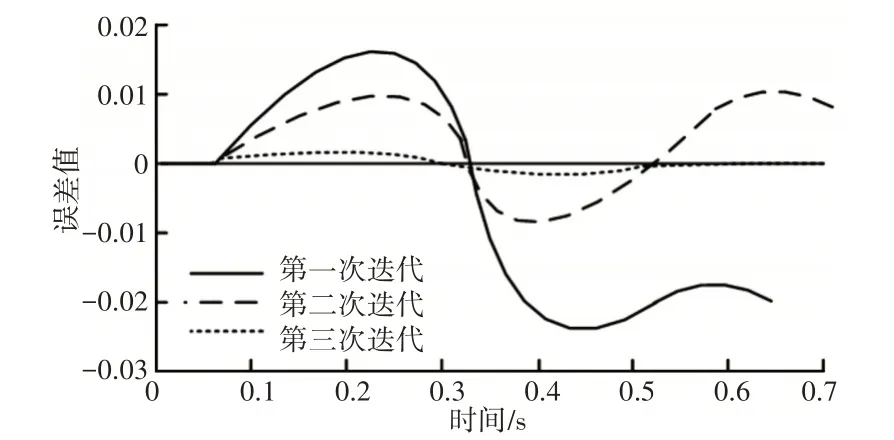
圖5 膝關節迭代控制位置誤差Fig.5 Iterative Control Position Error of Knee Joint
圖6 踝關節迭代控制位置誤差Fig.6 Position Error of Ankle Joint Iterative Control
由圖5和圖6能夠看出,膝關節與踝關節均經歷三次迭代后控制誤差值達到最小。表明本文控制方法的收斂速度較快,經過較少次數的迭代便可以滿足誤差需求,同時,膝踝兩關節迭代次數相同,表明協調運動效果較好。
5 結論
針對下肢康復訓練機器人膝踝協調運動控制方法,本文提出一種自適應迭代學習控制策略,改進了傳統迭代算法的不足,減少控制誤差,實現膝踝協調運動,研究結果如下:
(1)這里的方法的膝踝協調運動步態連續,膝踝協調運動速度誤差較小,能夠在較短時間內,使速度誤差控制在要求范圍內。
(2)這里的方法經過較少次數的迭代,膝關節和踝關節迭代控制位置誤差達到最小,收斂速度較快,膝踝協調運動控制效果較好。
