機(jī)械臂系統(tǒng)魯棒控制軌跡跟蹤
2022-04-27 06:16:10甄圣超陳小龍
機(jī)械設(shè)計(jì)與制造 2022年3期
余 濤,甄圣超,陳小龍
(合肥工業(yè)大學(xué)機(jī)械工程學(xué)院,安徽 合肥 230009)
1 引言
近年來,機(jī)械臂在工業(yè)自動化生產(chǎn)中得到了廣泛的應(yīng)用,很多應(yīng)用場合如打磨、焊接、裝配等要求機(jī)械臂能夠精確跟蹤軌跡運(yùn)動,具有不確定性的機(jī)械臂系統(tǒng)軌跡跟蹤控制一直是控制領(lǐng)域的研究熱點(diǎn)[1-2]。
目前,針對不確定性機(jī)械臂系統(tǒng)的控制方法主要有自適應(yīng)控制和魯棒控制,自適應(yīng)控制可以不斷學(xué)習(xí)、辨識不確定性參數(shù)調(diào)整自適應(yīng)律,但是無法應(yīng)用于具有結(jié)構(gòu)不確定性的系統(tǒng),且要求控制系統(tǒng)具備很高的實(shí)時計(jì)算能力;魯棒控制具有固定的控制結(jié)構(gòu),它能夠補(bǔ)償系統(tǒng)中結(jié)構(gòu)性不確定性和非結(jié)構(gòu)性不確定性,如抑制外界干擾和補(bǔ)償未建模動態(tài)不確定性,并且易于實(shí)現(xiàn)。目前,魯棒控制器的設(shè)計(jì)方法主要是基于H∞、μ、Kharitonov、Lyapunov、QFT五種理論,前三種主要用于線性時不變系統(tǒng),QFT雖然在實(shí)際應(yīng)用中適用于非線性系統(tǒng),但其理論基礎(chǔ)尚需進(jìn)一步論證,Lyapunov方法是迄今為止唯一建立了理論基礎(chǔ)并適用于非自治非線性系統(tǒng)的方法[3-4]。
基于Udwadia-Kalaba方程的機(jī)械系統(tǒng)動力學(xué)控制方法在各個領(lǐng)域受到廣泛的應(yīng)用[5-7],該方法特點(diǎn)是將機(jī)械系統(tǒng)的軌跡要求看作一種約束,再結(jié)合系統(tǒng)的無約束動力學(xué)模型,可以在不引入拉格朗日乘子的條件下對約束力進(jìn)行求解。但是該方法在應(yīng)用過程中必須初始條件相容且依賴于系統(tǒng)的精確動力學(xué)模型,而且機(jī)械臂系統(tǒng)是一個多輸入、多輸出、強(qiáng)耦合的復(fù)雜非線性系統(tǒng),建模過程中存在參數(shù)測量誤差、外界擾動、負(fù)載變化和未建模動態(tài)等不確定性因素影響,因此很難建立精確的機(jī)械臂系統(tǒng)的精確動力學(xué)模型[8-10]。
針對Udwadia-Kalaba方法難以解決機(jī)械臂系統(tǒng)不確定性問題和要求初始條件相容的問題,設(shè)計(jì)了一種新的魯棒控制算法,并且基于Lyapunov理論證明了該控制算法具有一致有界性和一致最終有界性,仿真試驗(yàn)結(jié)果表明所提控制方法的有效性和魯棒性,能夠控制臂沿著期望的軌跡精確運(yùn)動。
2 問題描述
機(jī)械臂系統(tǒng)的動力學(xué)模型一般方程如下:

由于測量誤差、外界干擾以及負(fù)載不確定性的影響,(1)式中的矩陣可以被拆解為精確值標(biāo)稱部分和不確定性部分。

基于Udwadia-Kalaba方程的動力學(xué)控制過程如下:
(1)求得機(jī)械系統(tǒng)的無約束動力學(xué)方程;

(2)將給定的軌跡約束寫成二階微分形式;

(3)得到機(jī)械系統(tǒng)在軌跡約束下的約束力;

式中:Qc—系統(tǒng)約束力廣義逆矩陣。
根據(jù)以上分析,基于Udwadia-Kalaba方程控制要求得到機(jī)械臂系統(tǒng)的精確動力學(xué)模型,這在實(shí)際情況下是不可能的。實(shí)際機(jī)械臂系統(tǒng)總是存在各種不確定性,如參數(shù)時變、負(fù)載變化、以及未建模動態(tài)等,這些不確定性因素導(dǎo)致Udwadia-Kalaba方程控制難以保證系統(tǒng)的控制精度和穩(wěn)定性。為了抑制不確定因素的影響,在Udwadia-Kalaba方程控制基礎(chǔ)上設(shè)計(jì)一個魯棒控制器對于不確定性機(jī)械臂系統(tǒng)是很有必要的。
3 魯棒控制器的設(shè)計(jì)
基于Udwadia-Kalaba方程,提出如下魯棒控制器:

其中,
穩(wěn)定性分析:
選取李雅普諾夫函數(shù)為:

對上式進(jìn)行求導(dǎo)得:

根據(jù)p1值得,

根據(jù)p2值得,

根據(jù)p3值得,

最終,我們可以得到,

基于上面的分析,證明控制器滿足一致有界性和一致最終有界性[11],表明系統(tǒng)是穩(wěn)定的。
4 仿真結(jié)果與分析
平面二自由度機(jī)械臂示意圖,如圖1所示。假設(shè)連桿為均質(zhì)桿,連桿1和連桿2長度為l1和l2,質(zhì)量為m1和m2;關(guān)節(jié)1與關(guān)節(jié)2的相對轉(zhuǎn)角為θ1和θ2,關(guān)節(jié)1與關(guān)節(jié)2的力矩分別為τ1和τ2。關(guān)節(jié)2處的電機(jī)質(zhì)量為m3,夾取物件的質(zhì)量為m4,重力加速度為g。
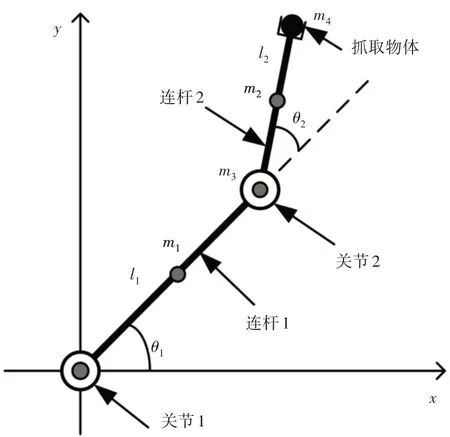
圖1 二自由度機(jī)械臂模型Fig.1 Two-Degree-of-Freedom Manipulator Model
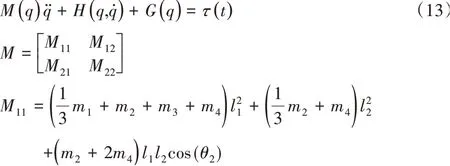
根據(jù)拉格朗日建模可以推導(dǎo)出該系統(tǒng)的動力學(xué)方程,
選取仿真時期望軌跡:

上式對時間求二階導(dǎo)數(shù),可得到二階約束形式:

寫成矩陣形式:

仿真結(jié)果圖,如圖2~圖6所示,可以看出,在約束軌跡初始條件不相容時,在設(shè)計(jì)的魯棒控制算法作用下,機(jī)械臂關(guān)節(jié)1和關(guān)節(jié)2的角度偏差能夠快速趨近于零,說明機(jī)械臂系統(tǒng)能夠快速跟蹤期望約束軌跡。表明所提控制算法可以解決機(jī)械臂系統(tǒng)初始條件不相容問題和系統(tǒng)不確定性問題。
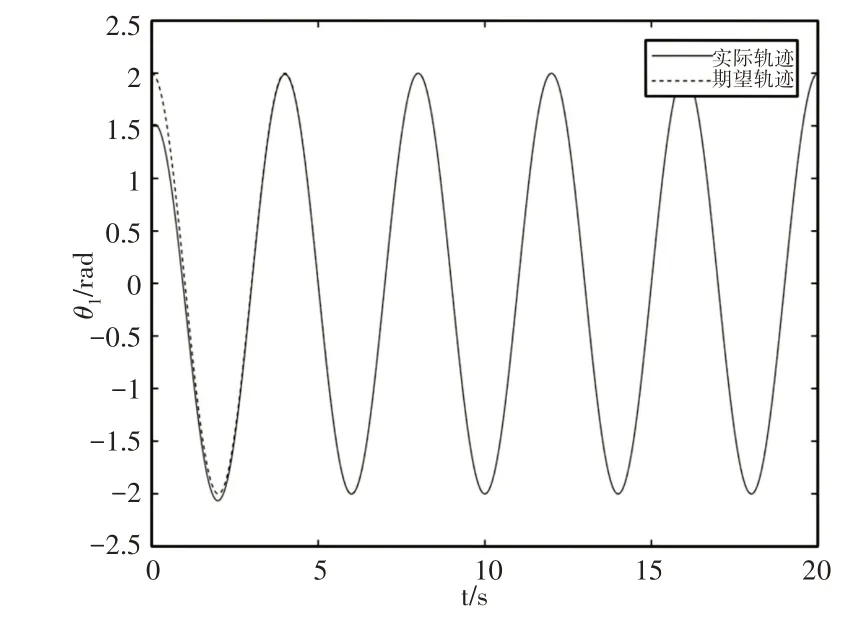
圖2 關(guān)節(jié)1角度變化曲線Fig.2 Angle Curve of Joint One
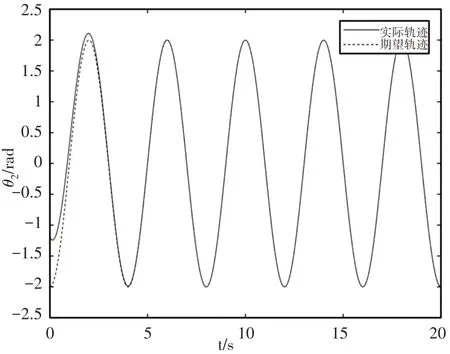
圖3 關(guān)節(jié)2角度變化曲線Fig.3 Angle Curve of Joint Two
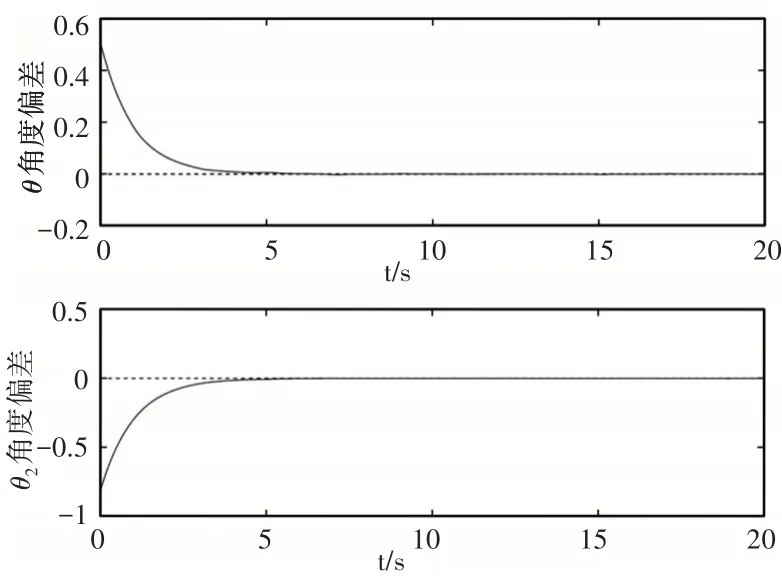
圖4 關(guān)節(jié)1和關(guān)節(jié)2的角度偏差曲線Fig.4 Angle Curve of Joint One and Joint Two

圖5 關(guān)節(jié)1控制力矩Fig.5 Control Torque of Joint One
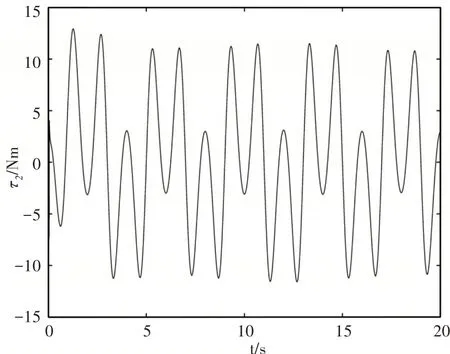
圖6 關(guān)節(jié)2控制力矩Fig.6 Control Torque of Joint Two
5 結(jié)論
針對具有不確定性的機(jī)械臂系統(tǒng)軌跡跟蹤控制問題,基于Udwadia-Kalaba方程設(shè)計(jì)了一種新的魯棒控制算法。該控制算法能夠有效解決機(jī)械臂系統(tǒng)不確定性問題和初始條件不相容的問題,為了驗(yàn)證控制方法的有效性和魯棒性,針對平面二自由度機(jī)械臂系統(tǒng)進(jìn)行了仿真試驗(yàn)。仿真結(jié)果表明:在軌跡初始條件不相容的情況下,該控制算法能夠克服系統(tǒng)不確定性的影響,控制機(jī)械臂跟蹤期望軌跡精確運(yùn)動。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電腦報(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
電腦報(2019年40期)2019-09-10 07:22:44
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
