一種用于高齡老人的桌面進食護理機器人
2022-04-27 06:17:28李偉,樊寧
機械設計與制造 2022年3期
關鍵詞:護理
李 偉,樊 寧
(1.鄭州工業應用技術學院機電工程學院,河南 鄭州 451100;2.鄭州工業應用技術學院藝術設計學院,河南 鄭州 451100)
1 引言
“2019年底,我國65周歲及以上人口已達17603萬人(約1.76億)”[1]。進食困難的廣泛存在大大影響了高齡老年人及其他殘疾人的營養狀況。在護理員每天的工作中,幫老人吃飯、喝水(占工作量的26.22%),加上定時喂藥等是工作量較大、占用時間較長的護理工作[2]。在同一護理時刻,1名護理人員只能為1名服務對象提供護理,工作艱苦、任務繁重。對于大部分失能的高齡老年人和其他殘疾人,提高生活質量與減輕護理工作量、緩解護理人力資源緊缺是我國養老事業面臨較難解決的矛盾和社會發展必須要突破的瓶頸。
2 解決方案
基于工業機器人系統作為輔助康復護理的解決方案,國內外有較多應用產品。最具代表性的是“英國Mike Topping公司研發的Handy1”和有機器人王國之稱的日本研發的“My Spoon”[3]。這類機器人主要幫助殘疾人或者失能老年人進餐。資料表明,被贊譽為“世界上最成功的康復機器人Handy1現在有100多名殘疾人經常在使用”[4]。要指出的是:全球范圍的護理機器人產品受成本的高低、操作的復雜性、友好安全性乃至文化傳統、風俗習慣等方面的影響和局限,并未得到廣泛使用。當前,我國社會老齡化日益加劇,傳統的孝道文化也要求政府和研究人員重視并加大研究力度,早日開發出適應大面積推廣應的護理機器人產品。
隨著人工智能的興起,桌面機器人作為新產品逐漸開闊了人們的視野,“桌面機器人的概念是在近幾年才被真正提出”[5]。科普教育是其目前主要發揮作用的領域。除了在機器人教育、培訓、辦公等行業有較多應用外,專門用于醫療、護理行業的研究工作已經逐步展開,且已成為國內外眾多研究機構研究的熱點,是機器人領域一個比較活躍的研究方向[6]。這里要特別強調:在桌面機器人架構基礎上研究、開發護理機器人產品,可以為高齡老年人的日常飲食護理活動提供比早期餐飲、康復護理機機器人更為有效的解決方案。與傳統的工業機械人存在操作復雜、身體笨重、體格龐大、成本高昂相比,桌面機器人基于開源平臺設計,容易上手,操作和應用簡單,輕量化,安全性好。事實上,用于高齡老人的桌面護理機器人,安全是在有人環境中獲得廣泛應用的關鍵所在。只有安全的護理機器人才具備使人機交互順利開展的前提條件。本方案要解決操作的安全性和簡易性,增強護理機器人產品在普通的日常生活中的可接受程度,更強調直接的護理使用體驗,包括降低生產成本和運行維護成本。更具體的設計體現在下述結構和系統設計之中。
3 結構設計
首要考慮的關鍵是減小護理機器人的自重與負載能力的比值,追求能滿足功能要求條件下的最小輸入功率。如圖1所示,與當前一般工業機器人的臂部構成方法不同,該護理機器人的大臂和小臂構成一種五連桿并聯機構。這里強調對應的大臂和小臂的驅動軸并不重合,即具有兩個不同軸的并聯的肩關節。
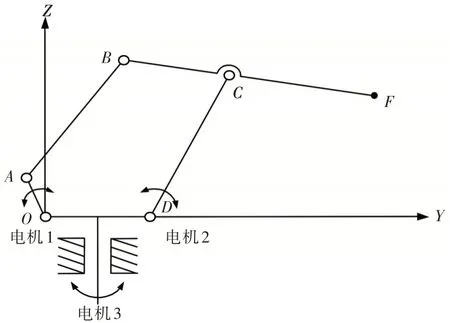
圖1 護理機器人大小臂結構簡圖Fig.1 Arm Structure Diagram of the Desktop Robot
采用這種并聯五桿機構的機械臂能優化臂部受力情況、減輕臂部重量、提高臂部承載能力[7]。
特殊的五連桿并聯機械臂為腕部俯仰驅動電動機與傳動機構設計提供了非常有利的條件,結構原理,如圖2所示。
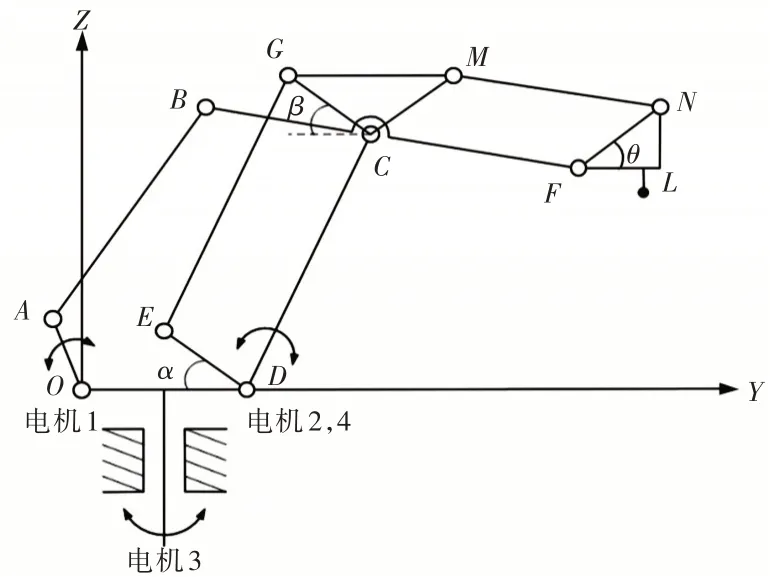
圖2 護理機器人大小臂與腕部結構簡圖Fig.2 Wrist Pitch and Arm Structure Diagram of the Desktop Robot
腕部處在小臂末端,靠腕部俯仰關節與小臂相連。動力由驅動電機4經雙平行四邊形機構CDEG和CFNM傳遞。腕部俯仰控制是護理機器人護理功能最重要的控制量之一,在大小臂移送食物或物品的中途過程要求腕部俯仰角保持水平固定,以免食物或物品溢出末端執行件(小匙)。
大小臂采用五連桿并聯,再與腕部俯仰機構串聯是令研發和使用者非常高興和滿意的創新設計,尤其適合護理機器人的減輕重量、減少電機功率、提高安全性的要求。采用Solidworks建立護理機器人的三維裝配模型,如圖3所示。不僅大臂和小臂的驅動電動機裝在腰部機架上,而且機器人的腕部俯仰電動機也安裝在腰部機架上,通過兩個平行四邊形機構作為傳動件實現機器人的腕部俯仰運動。這樣很有利于輔助進食作業。由于腕部俯仰只受腕部俯仰電機4控制,該電機不轉時,腕部在世界坐標(絕對坐標)系的俯仰角度是不變的。即:如無論大臂和小臂如何運動,只要腕部電機轉子不轉動,末端執行件(小匙)能始終保持水平狀態,滿足進食過程中勺子內的進食物不灑出的要求。當深入容器(碗)中裝進食物時,末端執行件(小匙)由腕部電機獨立驅動進行俯仰控制,俯仰角不受大小臂運動的影響并可以與大、小臂、腰部電機4軸聯動,操作和控制簡單、便于應用。
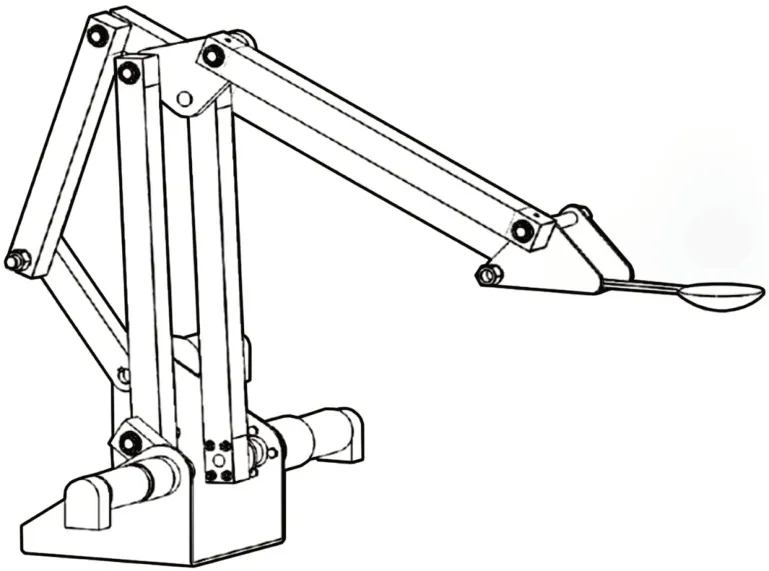
圖3 桌面護理機器人三維模型圖Fig.3 3D Model Diagram of the Desktop Robot
4 系統設計
系統研發基于開源arduino平臺。原因在于Arduino擁有大量的第三方資源,其開源特性和良好的兼容性使得使用者有大量的第三方資源可供選擇。較高的易用性降低了嵌入式系統設計和開發的門檻,該平臺的IDE環境可以提高系統設計開發效率[8]。由于是護理機器人需要多軸聯動,采用比較容易控制的ar‐duino mega 2560進行程序設計。arduino mega 2560開發板相比于其他控制板不需要進行底層代碼編寫,利用互聯網上穩定可靠的大量外圍模塊函數庫,直接編寫要運行的應用程序。URT-1集成了USB轉串口芯片,結合線性低壓差穩壓電路可以將USB信號方便地轉成5V或3V的串口信號電平。USB采用MINI的USB接口。由于電源端口有過流限制,最大6A,因此在本系統中控制4個伺服電機需要額外做供電分配處理。
桌面護理機器人大臂關節需要的驅動轉矩最大,伺服動力優先考慮飛特SM40BL無刷串行總線磁編碼伺服電機。這種伺服電動機采用12位高精度磁編碼測量位置,集直流電機、伺服驅動、總線式通訊接口為一體的集成伺服單元,具有加速度反饋,速度反饋,位置反饋三閉環伺服控制,可以進行開放的PID參數調試,能實現平穩地加速啟動和停止,如圖4所示。
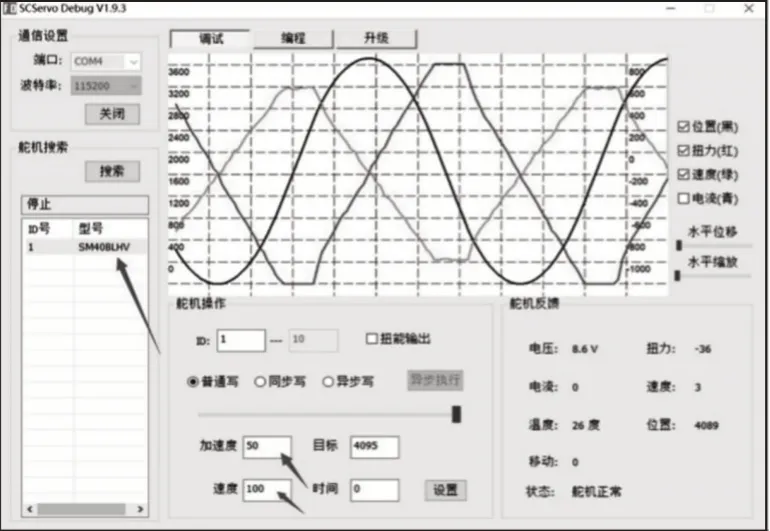
圖4 閉環伺服系統調試Fig.4 Debugging of Closed Loop Servo System
系統具有過熱保護,過載保護,過壓保護,過流保護,通過軟件可實時監控參數變化[9]。在設備運行時,動態監控數據變化,當內外部環境發生變化,如扭力超限,堵轉,溫度超限等,會觸及保護機制啟動,從而增加桌面護理機器人安全性并保護伺服電機本身。小臂、腕部和腰部(第4軸備用)選用SM30BL無刷串行總線磁編碼伺服電機。與SM40BL一樣,各關節伺服驅動電機具備串行總線接口,可以通過總線組成鏈型,每個伺服電機設定不同的節點地址,用異步串行接口統一控制。通過異步串行接口與系統通訊,根據需要和實際運行情況進行參數設置,包括波特率;0位誤差校準;極限角度設置;極限扭力設置等。用串口總線發送指令可以單個電機獨立控制,可分別設置為位置控制模式、恒調速電機模式與PWM輸出模式。通過串口總線發送指令也可以多個伺服電機聯動,即進行多坐標聯動插補,以滿足軌跡控制的需要,編程界面,如圖5所示。
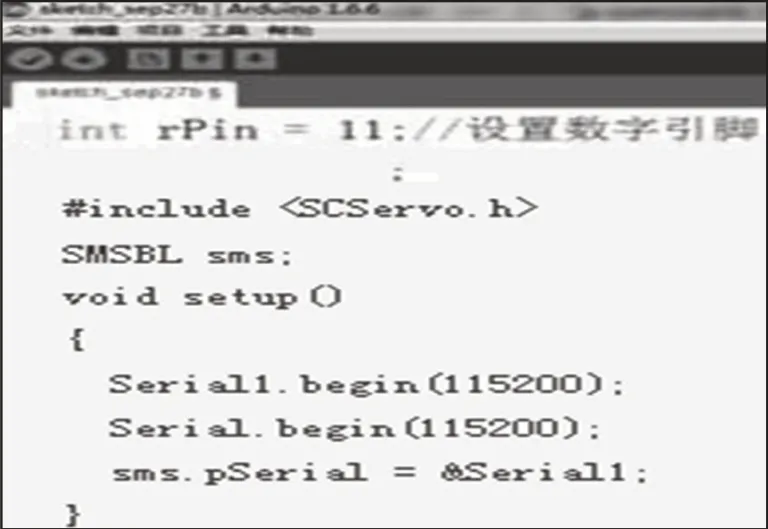
圖5 編程界面Fig.5 Programming Interface
這樣的串行總線控制布線極為簡單,具有開機回中位功能,編程容易,能脫離上位機獨立運行,方便實際應用。
5 應用驗證
當前,國內失能老人有一部分采用放置胃管的方法維持營養。包括進食、喂水、服藥等護理工作能有部分減輕,緩解護理人員缺乏的問題。但放置胃管會使消化道生理環境改變,容易使食道末端括約肌關閉不嚴甚至引起肺部感染[10]。對于還有吞咽功能的高齡老人,應盡量采用口腔進食。通過咀嚼和吞咽保持器官功能,也更容易消化吸收食物,有利于提高生活質量。因此,樣機主要針對具有吞咽功能,但自己進食有困難、需要護理人員幫助的高齡老人和其他殘疾人而設計、調試并投入應用,工作示意圖,如圖6所示。
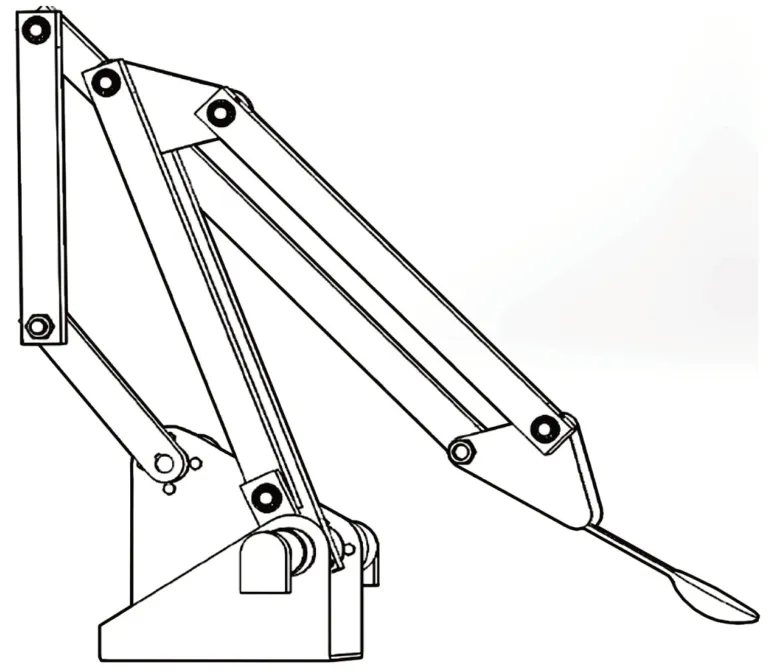
圖6 桌面護理機器人工作示意圖Fig.6 Working Diagram of the Robot for Providing Diet Care
需要進食時:大、小臂和腕部聯動使末端執行件小匙沿內壁插入到容器(碗)底部;下一步的動作主要是腕部的抬起,該動作也需要大小臂的輔助聯動,使小匙保持容器(碗)中心向上運動至腕部水平;接下來最關鍵的是腕部電機保持不動,大小臂聯動,使盛滿進食物的小匙保持水平并沿直線向上,到達進食高度,水平前伸運動到入口進食點;然后延時等待傳感器給出單次進食結束信號,回原位;循環至進食結束。初步使用表明:系統調試簡單,操作友好,響應及時,運行穩定。主要工作過程可以為服務對象進行單獨個性化設計。特別值得一提的是樣機可以工作在一名護理員同時看管多臺護理機器人的多機工作狀態。即一個護理人員在同一時間采用多個桌面護理機器人為不同老人輔助進食。不同人的吃飯速度的差異也不會影響其他人,從而擁有更多的時間去細嚼慢咽,消化食物。大大節省護理人員的勞動,提高進食效果和護理效率。而且機器也比人更有耐心,不知疲倦,隨時都可以保持正確的工作狀態服務于高齡老人和其他有需要的殘疾人。
6 結論
護理機器人技術的進步,特別是桌面機器人的發展使護理機器人做到高安全性、高準確度、高仿人類動作,能大大減少醫護人員工作量和工作壓力。這將是解決醫護專業人員不足、提高被護理者特別是高齡老人生活質量的有效方法。還應看到,對于各種傳染病人,包括新冠病毒感染者,用機器代替人能做到減少護理人員或被護理者與傳染源的直接接觸,降低交叉感染的可能性。期望這樣的產品能早日廣泛使用、推動我國養老事業的發展。
猜你喜歡
安徽醫學(2022年10期)2022-11-12 02:42:20
醫學食療與健康(2021年27期)2021-05-13 18:46:23
醫學概論(2021年18期)2021-01-21 22:46:45
中華養生保健(2020年7期)2020-11-16 01:14:02
中華養生保健(2020年3期)2020-11-16 00:52:46
中華養生保健(2020年2期)2020-11-16 00:49:54
家庭醫學(下半月)(2019年9期)2019-10-12 08:04:18
經濟技術協作信息(2018年20期)2019-01-19 02:56:26
中國衛生(2016年2期)2016-11-12 13:22:32
中國中醫藥現代遠程教育(2014年20期)2014-03-01 04:31:38
