基于BP神經網絡EPS系統控制策略研究
2022-04-27 06:00:34商顯赫林幕義
機械設計與制造 2022年3期
商顯赫,林幕義,2,陳 勇,2,馬 彬
(1.北京信息科技大學機電工程學院,北京100192;2.北京電動車輛協同創新中心,北京100192)
1 引言
電動助力轉向(Electric Power Steering)系統具有能耗低、可靠性高、維修方便等優點,因此在汽車上得到迅速的普及和應用,由于人們不斷追求更高舒適性的駕駛體驗,所以希望EPS系統能夠滿足轉向駕駛要求,比如駕駛員在轉向時希望省力還要有路感,針對這個問題,許多研究者對助力特性深入探究,但是大多集中在駕駛員操縱方向盤的力矩與電機助力上,很少有人研究車速與助力的關系,文獻[1]借助ADAMS∕CAR軟件進行建模和仿真,找到了車速與EPS系統助力矩之間的關系,確定了微型客車的車速感應系數,但是卻忽略了懸架、輪胎等汽車部件的影響。
因此,利用Carsim軟件接近實車的模型的優點,然后結合中國駕駛員所偏好的轉向力矩,確定了目標車型的車速感應系數,然后通過曲線擬合的方式,設計了曲線型助力特性曲線;接著利用神經網絡可以無限接近任意非線性函數的能力,于是采用基于BP神經網絡的PID自適應控制,完成k p、k i、k d三個參數的自整定,避免了調整參數的繁瑣和工作性能不佳的缺點,最后通過Matlab∕Simulink和Carsim的聯合仿真試驗,驗證了車速感應系數獲得的合理性,基于BP神經網絡控制策略比傳統的PID控制策略具有更高的魯棒性,為轉向控制器的設計提供了參考。
2 電動助力特性曲線的設計
助力特性的目標電流值,在轉向回正時是不起作用的,只有在常規的轉向助力模式下有效,助力特性曲線的類型,也會影響駕駛性能,不能按照簡單的計算方法去選擇,而是要根據符合中國駕駛員的駕駛習慣,按照對轉向系統的要求進行設計,其中曲線型助力特性曲線可以平衡要求轉向輕便性與具備駕駛路感的問題,故采用并進行擬合設計。
等式(1)給出了曲線輔助特性曲線的工作范圍,變量是方向盤扭矩,當絕對值小于1N·m時,助力電機無扭矩輸出,當絕對值大于6N·m時,電機的工作狀態是提供最大輸出,當在區間(1~6)N·m時,助力扭矩值由K(v)×f(T d)的值確定。

式中:T dmax、T h0—電機工作時的門限值;K(v)—車速感應系數;f(T d)—方向盤力矩函數[2-3]。
2.1 車速感應系數的設計
由于汽車在不同車速行駛時的阻力矩是非線性變化的,為了克服轉向過程中的阻力矩,故用車速感應系數來表征車速與助力矩之間的關系,由式(1)可知,電機理想助力矩T a_exp是決定車速感應系數的主要因素,因此,要確定某一車速下的感應系數,需要首先確定該車速下的理想助力矩,式(2)給出了汽車未裝有EPS時的方向盤最大轉矩T hmax、電機理想助力矩T a_exp和汽車裝有EPS時的方向盤理想轉矩T d_exp之間相互影響的關系。

為了在速度差異不同的情況下探索方向盤的理想轉矩,文獻[4]指出了中國駕駛員首選的轉向力矩,跟歐洲、日本等地駕駛者鐘愛的理想轉矩相同,在線性區域內,隨車速的增大逐漸增大,因此為路感模擬提供了理論依據,為助力特性曲線的設計提供參考,另外,文獻[5]指出一定轉向盤轉角或者側向加速度下,理想轉向盤轉矩與速度近似成線性正比關系,并且在特定情況下,與汽車的類型無關。
基于學者的研究成果,得到方向盤理想轉矩的大小;對于汽車未裝有EPS時的方向盤最大轉矩T hmax,通過Carsim軟件進行仿真獲得,首先在Carsim中建立目標車型,并設置前輪轉向系統類型為手動循環球式,標定往左轉方向盤為正,在某一車速下,給方向盤(0~360)°的角輸入,取該車速下的最大方向盤力矩T hmax,根據車速感應系數計算的公式,確定了車速感應系數[6],如表1所示。

表1 不同車速下的數據值Tab.1 Data Values at Different Speeds
車速感應系數隨著車速的增加曾現減小的趨勢,在確定了個別車速下的K(v),利用Matlab多項式擬合工具箱根據獲得的散點,完成全車速下車速感應系數的擬合,經過調試,當擬合多項式為3次多項式,如式(4),穩健擬合選用LAR的方式時,得到符合K(v)特征的擬合曲線,如圖1所示。


圖1 車速感應系數曲線Fig.1 Vehicle Speed Induction Coefficient Curve
2.2 助力特性曲線的設計
汽車在轉向助力時,助力電機要隨著駕駛員操縱方向盤力矩的大小相互接應,這種對應關系可以用函數f(T d)來表征,操縱力矩增大時,助力電機的輸出扭矩要隨之增大,要求f(T d)單調遞增并保證始終大于零,即f(T d)>0,f'(T d)>0,除此之外,電機輸出扭矩還要對操縱力矩的梯度函數單調遞增,即f''(T d)>0,因此函數f(T d)可以用式(3)來表征。

式中:a、b、c為待定系數,其中a=0.6。
根據式(1)來確定待定系數的值。

根據表1獲得的數據,按照式(7)進行計算,得到助力電機最大助力電流約為Imax≈20A,基于此,建立Simulink模型后,仿真獲得目標車型的特性曲線,從圖2可以看出,目標電流值隨著車速的增加而減小,不同速度之間目標電流值差異并不是等值變化的,是由于K(v)決定的,形狀類似開口向上的拋物線。


圖2 電動助力特性曲線圖Fig.2 Chart of Electric Power Characteristic
3 EPS系統控制策略研究
3.1 助力模式下的傳統PID控制策略
PID控制策略通過調節的k p、k i、k d參數值,來控制電機電流輸出特性,抵消電機負載,進而實現助力控制,PID控制器的數學描述為[7-8]:

式中:u(k)—PID控制器的輸出信號;k p、k i、k d—比例、積分及微分系數;e(t)—測量值與給定值之間的偏差;e?(t)—測量值與給定值偏差的導數。
3.2 助力模式下的BP神經網絡控制策略
傳統的PID控制策略直接對電機進行閉環控制,依靠調整k p、k i、k d三個參數來得到理想的效果,但是參數的調節存在一定的難度,由于神經網絡可以無限接近非線性函數,并且神經網絡可以用Matlab的S-Function模塊進行搭建,所以可以通過對系統性能的學習來尋找PID控制策略的最優解,采用基于BP神經網絡的PID自適應控制,這種控制算法在航天、機械、汽車等其他控制領域得到了廣泛的應用,而且控制效果特別好,它是根據增量式PID控制策略的控制原理,對參數k p、k i、k d自學習的神經PID控制,通過反饋型學習和權值調整,使參數能夠不斷地改變,以使輸出的目標電流值能夠和目標值達到吻合,也就是參數自整定。BP神經網絡的結構,如圖3所示。包括輸入層、隱藏層和輸出層三層。對于電動助力轉向系統來說,輸入層M個輸入節點可以表示為不同時刻的實際電流值、反饋電流值、偏差值和1,Q表示隱層的個數,隱層的神經元個數不宜太多,顯然,輸出層則為PID控制器的k p、k i、k d三個參數,由于整個控制系統采用的是負反饋,所以k p、k i、k d值要非負,否則會導致系統不穩定,因此將輸出層神經元活化函數取非負的Sigmoid函數[9-10]。

圖3 BP神經網絡結構圖Fig.3 Structure of BP Neural Network
由圖3可見,BP神經網絡的輸入層輸出為:

網絡的隱含層輸入為:

隱層神經元活化函數為:

網絡的隱層輸出為:

網絡的輸出層輸入為:

式中:—隱層權系數—輸出層權系數;帶有圓括號的數字1、2和3分別代表輸入層、隱含層和輸出層。
輸出層神經元活化函數為:

網絡的輸出層輸出為:

即可以表示為:

取性能指標函數為:

E(k)根據權重系數的負梯度方向,即根據最陡下降法校正網絡的權重系數來搜索調整,并附加慣性項,有:

其中,η—學習速率;α—慣性系數,且

由于?y(k)∕?u(k)求不出來,所以用函數sgn[?y(k)∕?u(k)]替換,經過替換導致的計算誤差,調整學習速率η來補償。
PID控制器的輸出根據經典增量數字PID的控制算法計算,即:

可得:
于是BP神經網絡輸出層權值系數的公式為:

用同樣的方法,隱層的權系數學習算法概括如下:


4 電動助力轉向系統仿真與分析
4.1 仿真模型的建立與調試
根據BP神經網絡的理論基礎,BP神經網絡模型的功能由Simulink的S-Function模塊編寫,函數調用通過.m文件。并把轉向系統的模型進行結合,同時設置如圖3所示的5個隱含層神經元,然后選擇學習速率η=0.25和慣性系數α=0.01,得到BP神經網絡模型,如圖4所示。電動助力轉向系統的仿真模型,同樣通過Matlab∕Simulink設定,如圖5所示。圖中目標汽車模型由Carsim軟件進行設定,把轉向系統的轉向類型可調節為手動循環球型,由于方向盤的轉矩和電機輔助力矩通過循環球式轉向器傳遞給搖臂軸,進而控制車輪轉向,為了使系統閉環,將方向盤轉矩和電機輔助扭矩之和作為Carsim的輸入,并且把汽車行駛時的車速和轉向器轉向搖臂轉角作為輸出,對建立好的聯合仿真模型,通過軟件仿真的方式,進行相關分析和驗證[11-14]。

圖4 BP神經網絡控制策略圖Fig.4 Control Strategy Chart of BP Neural Network
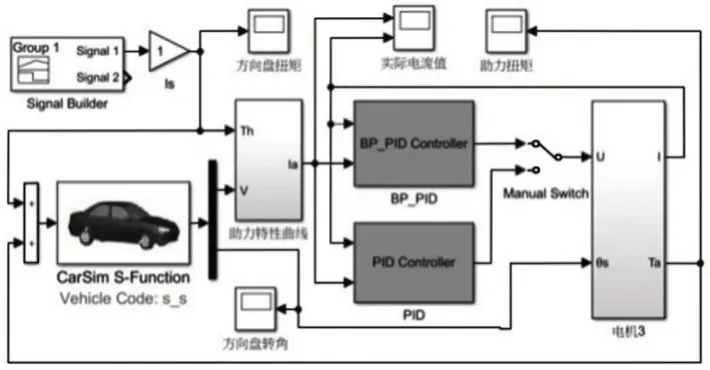
圖5 系統仿真模型Fig.5 System Simulation Model
4.2 仿真結果與分析
電動助力轉向系統在助力模式下工作時要能夠保證轉向的輕便性,為了減少駕駛員的轉向負擔,轉向模擬試驗用于驗證BP神經網絡控制策略在助力模式下的控制效果,在車速為10km∕h時,方向盤逐漸施加從中間位置到左側5N·m的力,持續4s,然后逐漸減小至0N·m,持續一秒,然后同樣向右轉動方向盤,由于沒有回正控制,所以需要繼續往左施加力才能回到中間位置,以這樣的方式,可以獲得有電機輔助和無電機輔助兩種情況下方向盤轉角和轉矩的關系結果,如圖6所示。從結果可以分析出,達到相同的方向盤轉角,有助力會比無助力需要更小的方向盤轉矩,能夠實現轉向輕便性的要求,由于仿真只驗證助力模式下的控制策略,所以,用同樣的力向左和向右操縱方向盤時,方向盤角度是不對稱的,需要通過回正模式進行調整。

圖6 方向盤角度和扭矩圖Fig.6 Steering Wheel Angle and Torque Diagram
根據Carsim軟件輔助設計的曲線型助力特性曲線,可以實現轉向過程中要求省力和追求“路感”的矛盾,對于BP神經網絡控制策略的控制效果,還可以通過汽車在不同工況下,駕駛員轉向時電機輸出的實際電流值進行評價,當設定為不同的速度時,給出方向盤(-10~10)N·m的轉矩輸入,并獲得不同工況下的實際電流曲線,如圖7所示。通過圖7可以看出,采用的BP神經網絡實際控制效果通過和圖2對比,能夠非常接近目標值,因此具有較好的魯棒性。

圖7 不同工況下的實際電流曲線Fig.7 Actual Current Curve Under Different Conditions
由于基于BP神經網絡的PID自適應控制策略實現了參數的自動調整,所以提高了工程領域調參的繁瑣,對于控制的效果,需要通過試驗來驗證,EPS系統的控制目標就是實現對目標電流的跟隨,因此,在車速分別為30km∕h和60km∕h時,給轉向盤6N·m的階躍輸入,仿真步長設定為0.001s,得到兩種控制策略的實際電流值與目標電流值的差異情況,如圖8所示。

圖8 兩種控制策略控制效果圖Fig.8 Control Effect Charts of Two Control Strategies
從圖8的結果可以看出,汽車在低速和高速時,經驗法調試的傳統PID控制策略控制的實際電流值低于目標值,有可能造成轉向不足的問題,而基于BP神經網絡的PID自整定控制策略在車速30km∕h時,經過0.125s趨于穩定,雖然略小于傳統PID,但是能夠和所期望的理想目標值達到較高的吻合,在車速60km∕h時,比傳統PID有著較小的波動,經過一個超調后就趨于穩定,整體性能優于傳統PID控制策略。
5 結論
(1)以循環球式轉向器作為轉向機構的輕型貨車作為研究對象,對助力模式下的控制策略進行了探究,利用Carsim軟件具有接近實車模型的優勢,確定了車速感應系數,設計出了兼顧輕便和“路感”的曲線型助力特性曲線。(2)通過BP神經網絡自學習和權值調整的優勢結合PID控制算法,實現了PID算法參數的自整定,然后通過仿真試驗驗證了BP神經網絡控制策略不僅能到實現助力模式下轉向輕便的效果,而且對目標電流具有較好的跟隨性,比傳統的PID控制策略具有較高的魯棒性。
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
科學大眾(2021年9期)2021-07-16 07:02:40
能源工程(2020年6期)2021-01-26 00:55:22
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
商周刊(2017年17期)2017-09-08 13:08:58
中國衛生(2016年2期)2016-11-12 13:22:18
通信電源技術(2016年1期)2016-04-16 04:57:26
