關(guān)鍵姿態(tài)映射下視頻動態(tài)幀目標(biāo)定位方法
2022-04-19 00:45:52陳戰(zhàn)勝
計算機(jī)仿真 2022年3期
關(guān)鍵詞:方法
范 潔,謝 鑫,陳戰(zhàn)勝
(北京聯(lián)合大學(xué)應(yīng)用科技學(xué)院,北京 100101)
1 引言
現(xiàn)階段計算機(jī)智能監(jiān)控技術(shù)[1]的快速發(fā)展,視頻序列中目標(biāo)檢測定位已成為現(xiàn)下圖像處理領(lǐng)域的關(guān)鍵技術(shù)之一。隨著科技的發(fā)展,人們想要獲得的信息越來越多且信息的詳細(xì)度要求更高,因此如何加強(qiáng)目標(biāo)個體定位技術(shù),以滿足社會現(xiàn)實需求成為現(xiàn)下研究領(lǐng)域中較為重要的課題[2]。
相關(guān)領(lǐng)域?qū)<业玫降妮^好成果如下:文獻(xiàn)[4]提出了一種基于擴(kuò)展卡爾曼濾波(EKF)的目標(biāo)定位算法。根據(jù)視頻平臺鎖定跟蹤目標(biāo)的特性,對同一目標(biāo)進(jìn)行多次測量。依據(jù)組合姿態(tài)信息結(jié)合地球橢球模型,確定目標(biāo)的視軸指向,建立狀態(tài)方程和測量方程,最后利用擴(kuò)展卡爾曼濾波實現(xiàn)視頻目標(biāo)定位。但是該方法的視頻目標(biāo)姿態(tài)映射效果較差,應(yīng)用過程較為復(fù)雜,導(dǎo)致目標(biāo)定位結(jié)果存在較大誤差。文獻(xiàn)[5]針對目標(biāo)快速運(yùn)動、遮擋等復(fù)雜視頻場景中,目標(biāo)跟蹤魯棒性差和跟蹤精度低的問題,提出一種基于多層卷積特征的自適應(yīng)決策融合目標(biāo)識別跟蹤算法。首先提取卷積神經(jīng)網(wǎng)絡(luò)(CNN)中幀圖像的多層卷積特征,改善網(wǎng)絡(luò)單層特征表征目標(biāo)信息不全面的缺陷,增強(qiáng)算法的泛化能力;同時使用多層特征計算幀圖像相關(guān)性響應(yīng),提高算法的目標(biāo)姿態(tài)跟蹤精度;最后該方法使用自適應(yīng)決策融合算法將所有相應(yīng)中目標(biāo)位置決策動態(tài)融合以定位目標(biāo)。融合算法綜合考慮生成響應(yīng)的各跟蹤器歷史決策信息和當(dāng)前決策信息,以保證算法的魯棒性。該方法的視頻目標(biāo)姿態(tài)跟蹤效果較好,但是存在復(fù)雜度高、定位精度不理想問題。
雖然上述兩種傳統(tǒng)方法能夠?qū)σ曨l動態(tài)幀中目標(biāo)進(jìn)行定位,但在實際操作過程中,都具有定位精度不夠理想且未有效消除噪聲干擾導(dǎo)致定位不精準(zhǔn)。基于此,提出新的關(guān)鍵姿態(tài)映射下視頻動態(tài)幀目標(biāo)定位方法。根據(jù)核密度估計理論建立非參數(shù)模型。獲取連續(xù)多幀微分法確定像素點和背景模型的概率分布,使方法在一定程度上克服了諸如光、振動等因素的干擾,并且定位精度更高。
2 基于高斯密度估計的視頻關(guān)鍵姿態(tài)背景模型
2.1 核密度估計
核密度估計[6]在一般情況下作為數(shù)學(xué)估計方面的數(shù)理統(tǒng)計工具,在圖像領(lǐng)域中該方法不用圖像背景的特征分布形式,也能在核函數(shù)統(tǒng)計結(jié)果中選取出合適的數(shù)據(jù)矩陣,并且求解出矩陣中每個不同的概率分布,然后根據(jù)結(jié)果構(gòu)建出數(shù)據(jù)樣本以及空間中的分布模型。
在目標(biāo)區(qū)域的個體劃分和提取特征過程中,由于存在外界非自然環(huán)境影響和自然噪聲干擾,取得結(jié)果不夠精準(zhǔn)。而常規(guī)方法往往忽略了先驗知識步驟,導(dǎo)致在樣本足夠的情況下,核密度估計無法逐步收斂。因此本文首先設(shè)定先驗知識,使所提方法在視頻通用性方面更有效地提取動態(tài)目標(biāo)。
假設(shè)存在某一維空間,并且空間數(shù)據(jù)點有n個,用R=(x1,x2,…,xn)表示,在R集合中取獨(dú)立分布隨機(jī)變量,而對應(yīng)變量是一個完全滿足于分布密度函數(shù)的條件變量p(x),那么在任意x(x∈R)的核密度估計為

(1)
式(1)中K(·)為核函數(shù),而n和h則分別表示數(shù)據(jù)點數(shù)量與光滑參數(shù)[7],以每個采樣點為中心的局部函數(shù)加權(quán)平均效應(yīng)為數(shù)據(jù)塊的估計概率密度函數(shù)值。在實際計算的過程中,K(·)都會選擇以零為中心點,且具有部分支撐點的概率密度函數(shù)取值,核函數(shù)具體取值如下表1:


(2)
這樣根據(jù)式(2)便可得知核密度估計,是由視頻序列中每個像素進(jìn)行加權(quán)平均處理后得知概率密度分布[8]的,而高斯函數(shù)則可以表述出樣本概率的具體分布密度,從而可以確定函數(shù)的平滑、連續(xù)和最小密度,以便對小樣本產(chǎn)生良好估計效果。那么式(2)可以進(jìn)一步寫為

(3)
2.2 核函數(shù)帶寬和方差的選擇
在實際應(yīng)用中,核函數(shù)的帶寬取值是非常重要的,因為該取值會直接影響計算的最后結(jié)果以及圖像顯著性區(qū)域檢測的精準(zhǔn)度。樣本密度分布曲線可能有較大波動,如果帶寬取值過大,那么便會呈現(xiàn)出一種平滑現(xiàn)象。因此,需要獲得任意連續(xù)幀樣本絕對差和平均值:
其中,連續(xù)幀樣本中值m=median(|xi-xi+1|),假設(shè)xi服從高斯分布N(μ,?2),那么(xi-xi+1)同樣服從于N(0,2?2)的高斯分布,根據(jù)正態(tài)分布的對稱性及中位數(shù)的定義得Pr(N(0,2?2)>m)=0.25,因此標(biāo)準(zhǔn)差可得
參數(shù)曲線被分為四個調(diào)整區(qū)域,它們分別是:高光、亮調(diào)、暗調(diào)、陰影。我們可以通過曲線區(qū)域下方的三個三角形滑塊控制這四個區(qū)域覆蓋的影調(diào)范圍。向左移動第一個三角,即縮小陰影區(qū)域,擴(kuò)大暗調(diào)區(qū)域;其他區(qū)域以此類推。當(dāng)我們將鼠標(biāo)移動到曲線上方,當(dāng)前的可調(diào)整區(qū)間則會被高亮顯示出來。單擊并拖動鼠標(biāo)即可對對應(yīng)區(qū)域進(jìn)行更改。

(4)
2.3 視頻關(guān)鍵姿態(tài)背景模型的構(gòu)建
在同一特定圖像序列中,背景圖像通常是相同的。因此,在實際應(yīng)用中,像素值較長、較為穩(wěn)定則為背景像素。如果像素的當(dāng)前值與背景值匹配,可以改變閾值,達(dá)到提取背景信息的目的。
通過對每個像素點的概率進(jìn)行研究,利用上述公式確定的模型計算幀中像素點的概率分布P(x),如果分布概率p小于默認(rèn)閾值T,則將像素分類為前一個風(fēng)景點,否則,程序可以隔離背景并識別剪輯中的動態(tài)目標(biāo)。閾值通常是根據(jù)實驗列中使用的視頻序列來確定的,因此有

(5)
由于視頻序列中的場景是不斷變化的,為了適應(yīng)視頻序列的變化,保證目標(biāo)提取的準(zhǔn)確性,需要不斷更新背景模型,在核密度模型中。一般情況下,使用當(dāng)前幀圖像代替原始幀圖像作為新的樣本,使背景更新方法便于對背景樣本中采集的透視像素進(jìn)行分類。其中連續(xù)幀差分[9]計算求解的結(jié)果將會作為下一次更新視頻序列的前提。若在下次計算的過程中,活動點是固定的目標(biāo)動態(tài),那么視頻像素將不會發(fā)生改變,而原始的像素樣本就需要在保持原有位置的基礎(chǔ)上對其進(jìn)行改變,用來當(dāng)作背景板的樣例。
假設(shè)It-1,It-2,It是固定時間t-2,t-1,t中的動態(tài)圖像,那么針對三幀圖像同步進(jìn)行的運(yùn)算式就有

(6)
在三個消解幀中提供運(yùn)動像素,分析兩幀之間的差異,并從第一幀中提取活動幀的運(yùn)動區(qū)域。如果運(yùn)動目標(biāo)存在,且在短時間內(nèi)出現(xiàn),則可以有效避免將背景像素作為前像素進(jìn)行檢測,減少誤識區(qū)域。它可以減小目標(biāo)的運(yùn)動和跟蹤區(qū)域。
(7)
根據(jù)上式結(jié)果,對前景圖像目標(biāo)沒有變化的視頻幀進(jìn)行統(tǒng)計,并在一定基礎(chǔ)上設(shè)置閾值th,當(dāng)實際的統(tǒng)計數(shù)值高于指定閾值時,那么就可以認(rèn)為前景視頻動態(tài)圖像的像素是一直保持在靜止?fàn)顟B(tài)的,這樣就可以將其重新投放到新的背景中,根據(jù)檢測出來的顯著性區(qū)域M、M1以及M2即可獲取出新的視頻關(guān)鍵姿態(tài)背景模型

(8)
3 關(guān)鍵姿態(tài)映射下視頻動態(tài)幀目標(biāo)定位
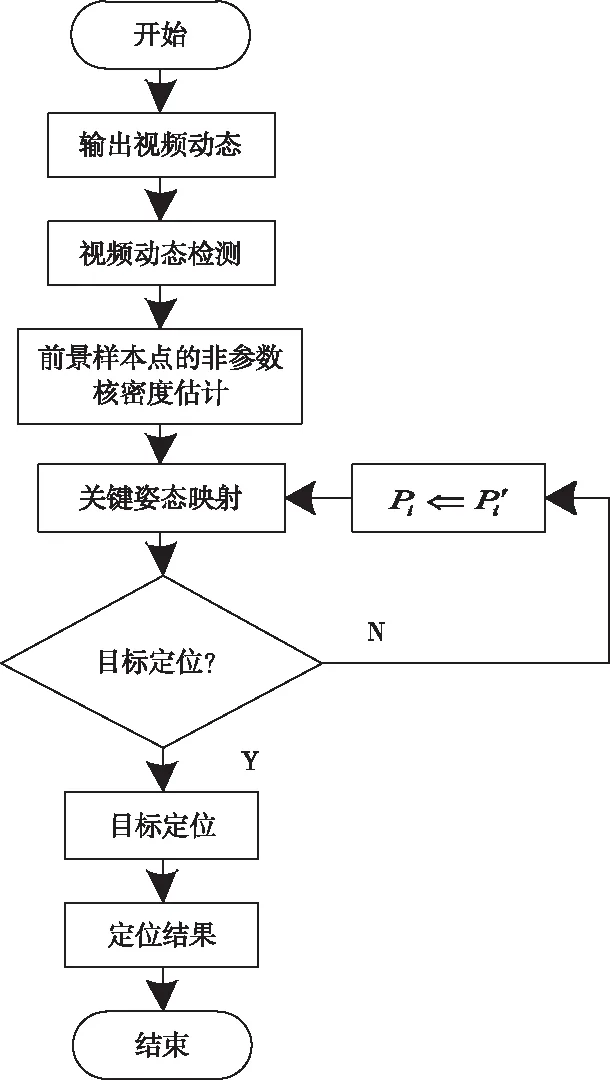
圖1 目標(biāo)定位流程圖
假設(shè)如果m維空間同時擁有著n個數(shù)據(jù)點(x1,x2,…,xn),并且其中任意一個姿態(tài)數(shù)據(jù)點都可以將其看作為視頻目標(biāo)中心點,那么就可以將數(shù)據(jù)點xi出的密度指標(biāo)判定為

(9)
結(jié)合上式的計算結(jié)果,根據(jù)減法聚類算法[10]思想,當(dāng)計算求解出所有數(shù)據(jù)點的密度指標(biāo)后,便可選取出其中一個密度指標(biāo)最高的節(jié)點來作為第一個關(guān)鍵姿態(tài),本文設(shè)定xc1為該目標(biāo)中心,而Pc1則是其對應(yīng)的核函數(shù)密度指標(biāo),這樣任意數(shù)據(jù)點xi的指標(biāo)便可根據(jù)下式做出對應(yīng)的改變

(10)
這里hbj(j=1,2,…,m)為常數(shù),一般情況下hbj=ηhaj,其中將η描述為大于1的正常數(shù)值,防止出現(xiàn)距離較近的兩個目標(biāo)中心。
當(dāng)視頻動態(tài)中數(shù)據(jù)點的核密度指標(biāo)[11]出現(xiàn)變動后,將其中密度指標(biāo)最大取值設(shè)定為待定位視頻中目標(biāo)個體,在此期間利用不斷的迭代獲得最優(yōu)目標(biāo)中心,Pi<ε·Pc1(0<ε≤1)為迭代終止指令。
在對視頻動態(tài)目標(biāo)進(jìn)行定位的過程中,目標(biāo)實際核密度取值在一定范圍內(nèi)是與圖像數(shù)據(jù)點以及密集程度成正比的,根據(jù)這一特征點,便可用于描述視頻目標(biāo)的帶寬參數(shù)。
假設(shè)通過計算獲取出第一個目標(biāo)中心點的數(shù)據(jù)點取值為x1時,與其相互對應(yīng)的帶寬值[12]便可標(biāo)記為h1i,而Pc1則描述為數(shù)據(jù)點的密度取值,這樣當(dāng)?shù)趇個用于描述視頻目標(biāo)的帶寬取值hij即可變換為hij=(pi/Pc1)·h1i。
4 實驗結(jié)果與分析
4.1 實驗樣本采集
為驗證論文方法的應(yīng)用效果,設(shè)計實驗。本次實驗采用某時間段的交通視頻監(jiān)控圖像作為實驗測試樣本,視頻樣本采集室內(nèi)環(huán)境如圖2所示。圖3為視頻樣本中隨機(jī)抽取的視頻圖像樣本。

圖2 實驗樣本采集環(huán)境

圖3 實驗樣本
4.2 圖像樣本訓(xùn)練
為驗證所提方法分析的視頻序列像素點噪聲概率密度的有效性,對樣本視頻圖像進(jìn)行兩次訓(xùn)練,驗證該步驟是否能夠降低視頻目標(biāo)噪聲。本次處理的視頻幀數(shù)為30fps,實驗迭代次數(shù)為25次,訓(xùn)練結(jié)果如圖4所示。

圖4 樣本訓(xùn)練結(jié)果
依據(jù)圖4實驗結(jié)果可知,經(jīng)過兩次樣本訓(xùn)練,視頻圖像的目標(biāo)噪聲得到了有效降低,說明所提方法的為所提方法分析的視頻序列像素點噪聲概率密度具有降低圖像噪聲效果,為方法的應(yīng)用性驗證提供依據(jù)與條件。
4.3 不同方法的視頻目標(biāo)定位
為驗證提出方法的視頻圖像目標(biāo)定位性能,設(shè)計不同方法動態(tài)幀目標(biāo)定位精度對比實驗。本次實驗的樣本視頻圖像中包括多目標(biāo),如行人、騎行人、行駛車輛,且存在多處交通危險點,利用該樣本圖像進(jìn)行實驗結(jié)果的驗證具有可靠性。將文獻(xiàn)[4]提出的基于擴(kuò)展卡爾曼濾波(EKF)的目標(biāo)定位算法、文獻(xiàn)[5]提出的基于多層卷積特征的自適應(yīng)決策融合目標(biāo)識別跟蹤算法作為實驗的對照組,與提出方法進(jìn)行對比分析,動態(tài)幀目標(biāo)定位精度對比結(jié)果如圖5所示。

圖5 不同方法視頻目標(biāo)定位精度對比
由圖5實驗結(jié)果可以看出,文獻(xiàn)[4]方法定位識別出的視頻圖像點為兩處,但是這兩個目標(biāo)點僅有一個是交通異常點,另外一個目標(biāo)為正常行駛車輛,說明該方法的視頻目標(biāo)定位精度偏低。與該方法相比,文獻(xiàn)[5]方法定出出的視頻圖像目標(biāo)更多,但是此時間點的交通狀況的關(guān)鍵點沒有進(jìn)行定位,即交通事故點,說明該方法的定位應(yīng)用效果不理想。所提方法的視頻圖像目標(biāo)定位效果為圖4的(c),從該結(jié)果中可以看出,所提方法的目標(biāo)定位更為全面,對該監(jiān)控視頻中的交通事故、騎行危險者以及肢體沖突均完成的定位,具有較好的定位效果。這是因為所提反復(fù)噶采用高斯密度估計法構(gòu)建了視頻動態(tài)圖像關(guān)鍵姿態(tài)背景模型,可以高精度提取動態(tài)個體目標(biāo)關(guān)鍵姿態(tài)特征輪廓,以更高的準(zhǔn)確度實現(xiàn)視頻圖像目標(biāo)的定位。
5 結(jié)論
現(xiàn)階段視頻目標(biāo)個體定位問題也成為了現(xiàn)下領(lǐng)域中較為重要的研究課題之一,但傳統(tǒng)目標(biāo)定位方法無法滿足于當(dāng)前基本需求,基于此本文在關(guān)鍵姿態(tài)映射的基礎(chǔ)上,提出新的視頻動態(tài)幀目標(biāo)定位方法,采用高斯密度估計方法建立視頻動態(tài)圖像的背景模型,對視頻序列中像素點的種質(zhì)素值進(jìn)行概率密度分析,提取動態(tài)目標(biāo),選擇第一個目標(biāo)中心,改變樣本點的密度估計,達(dá)到實現(xiàn)目標(biāo)位置的目的。實驗結(jié)果表明該方法有效地解決了傳統(tǒng)定位方法存在的問題,具有良好的定位效果。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
